
IMAGE-BASED AND INTRINSIC-FREE VISUAL NAVIGATION
OF A MOBILE ROBOT DEFINED AS A GLOBAL VISUAL
SERVOING TASK
C. P
´
erez, N. Garc
´
ıa-Aracil, J.M. Azor
´
ın, J.M. Sabater, L. Navarro
2
R. Saltar
´
en
1
1
Departamento de Autom
´
atica, Electr
´
onica e Inform
´
atica Industrial Universidad Polit
´
ecnica de Madrid.
2
Dept. Ingenier
´
ıa de Sistemas Industriales. Universidad Miguel Hern
´
andez.
Avd. de la Universidad s/n. Edif. Torreblanca. 03202 Elche, Spain
Keywords:
Visual servoing, mobile robot navigation, continuous path control.
Abstract:
The new contribution of this paper is the definition of the visual navigation as a global visual control task which
implies continuity problems produced by the changes of visibility of image features during the navigation. A
new smooth task function is proposed and a continuous control law is obtained by imposing the exponential
decrease of this task function to zero. Finally, the visual servoing techniques used to carry out the navigation
are the image-based and the intrinsic-free approaches. Both are independent of calibration errors which is
very useful since it is so difficult to get a good calibration in this kind of systems. Also, the second technique
allows us to control the camera in spite of the variation of its intrinsic parameters. So, it is possible to modify
the zoom of the camera, for instance to get more details, and drive the camera to its reference position at the
same time. An exhaustive number of experiments using virtual reality worlds to simulate a typical indoor
environment have been carried out.
1 INTRODUCTION
Image-based visual servoing approach is now a well
known control framework (Hutchinson et al., 1996).
A new visual servoing approach, which allows to con-
trol a camera with changes in its intrinsic parame-
ters, has been published in the last years (Malis and
Cipolla, 2000; Malis, 2002c). In both approaches,
the reference image corresponding to a desired po-
sition of the robot is generally acquired first (during
an off-line step), and some image features extracted.
Features extracted from the initial image or invariant
features calculated from them are used with those ob-
tained from the desired one to drive back the robot to
its reference position.
The framework for robot navigation proposed is
based on pre-recorded image features obtained during
a training walk. Then, we want that the mobile robot
repeat the same walk by means of image-based and
intrinsic-free visual servoing techniques. The main
contribution of this paper are the definition of the vi-
sual navigation as a global visual control task. It im-
plies continuity problems produced by the changes of
visibility of image features during the navigation and
the computing of a continuous control law associated
to it.
According to our knowledge, the approximation
proposed to the navigation is totally different and new
in the way of dealing with the features which go in/out
of the image plane during the path and similar to some
references (Matsumoto et al., 1996) in the way of
specifying the path to be followed by the robot.
2 AUTONOMOUS NAVIGATION
USING VISUAL SERVOING
TECHNIQUES
The strategy of the navigation method used in this pa-
per is shown in Figure 1. The key idea of this method
is to divide the autonomous navigation in two stages:
the first one is the training step and the second one is
the autonomous navigation step. During the training
step, the robot is human commanded via radio link
or whatever interface and every sample time the robot
acquires an image, computes the features and stores
them in memory. Then, from near its initial position,
the robot repeat the same walk using the reference
features acquired during the training step.
189
Pérez C., García-Aracil N., M. Azorín J., M. Sabater J., Navarro L. and Saltarén R. (2005).
IMAGE-BASED AND INTRINSIC-FREE VISUAL NAVIGATION OF A MOBILE ROBOT DEFINED AS A GLOBAL VISUAL SERVOING TASK.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 189-195
DOI: 10.5220/0001155301890195
Copyright
c
SciTePress
Mobilerobot:Referencepose
Mobilerobot:Currentpose
Teachingstep
Recording
featuressequence
AutonomousNavigation
basedonrecorded
featuressequence
1.- Acquireimage
2.-Computefeatures
3.-Recordfeatures
Ineachsampletime:
T
0
T
1
T
2
T
3
T
4
T
n
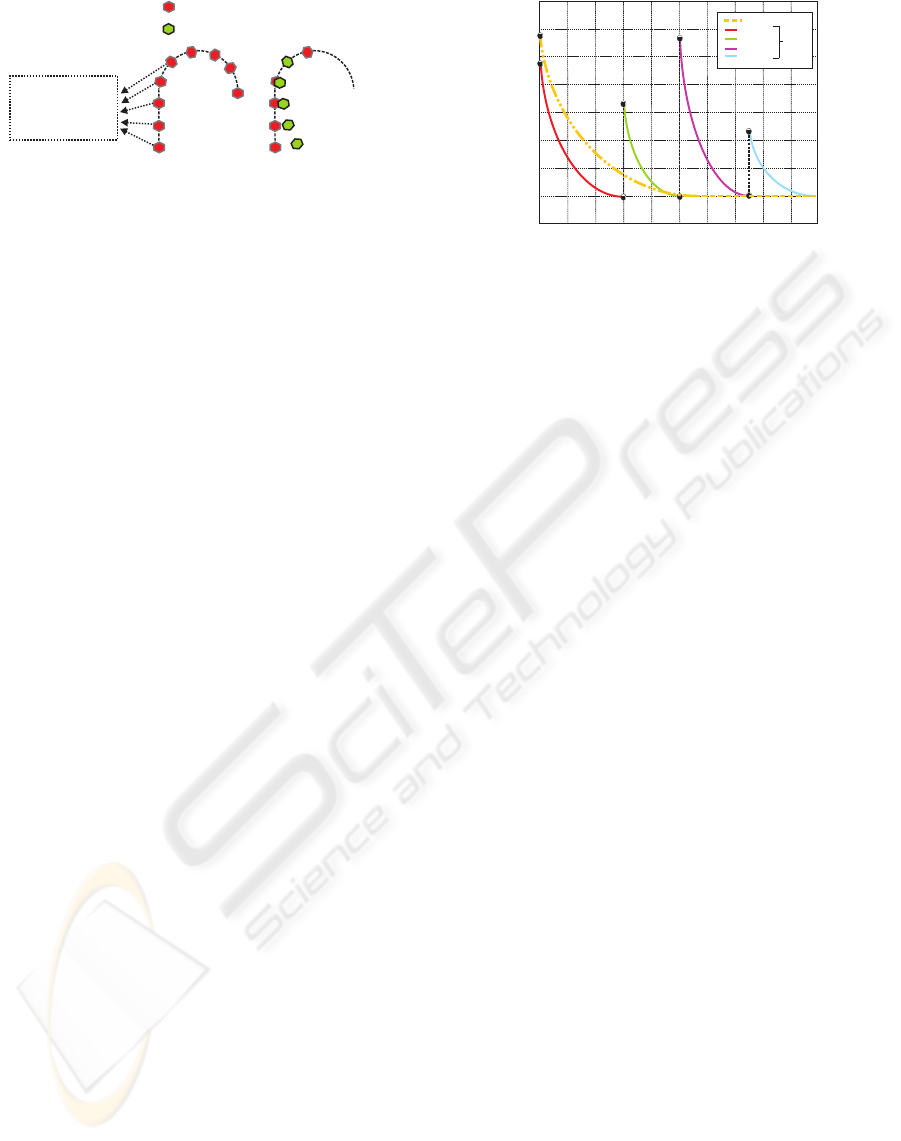
Figure 1: The strategy of the navigation method imple-
mented. First a training step and the autonomous naviga-
tion.
2.1 Control law
As it was mentioned in Section 1, image-based and
intrinsic-free visual servoing approaches (Hutchinson
et al., 1996; Malis and Cipolla, 2000) was used to de-
velop the autonomous navigation of the robot. Both
approaches are based on the selection of a set s of vi-
sual features or a set q of invariant features that has
to reach a desired value s
∗
or q
∗
. Usually, s is com-
posed of the image coordinates of several points be-
longing to the considered target and q is computed as
the projection of s in the invariant space calculated
previously. In the case of our navigation method, s
∗
or q
∗
is variable with time since in each sample time
the reference features is updated with the desired tra-
jectory of s or q stored in the robot memory in order
to indicate the path to be followed by the robot.
To simplify in this section, the formulation pre-
sented is only referred to image-based visual ser-
voing. All the formulation of this section can be
applied directly to the invariant visual servoing ap-
proach changing s by q. The visual task function
(Samson et al., 1991) is defined as the regulation of
an global error function instead of a set of discrete
error functions (Figure 2):
e = C(s − s
∗
(t)) (1)
The derivative of the task function,considering C
constant, will be:
˙e = C(˙s − ˙s
∗
) (2)
It is well known that the interaction matrix L , also
called image jacobian, plays a crucial role in the de-
sign of the possible control laws. L is defined as:
˙
s = L v (3)
where v = (V
T
, ω
T
) is the camera velocity screw
(V and ω represent its translational and rotational
component respectively).
Plugging the equation (3) in (2) we obtain:
˙e = CLv − C ˙s
∗
(4)
Error
Iterations
0
Global Task
Sub-Task1
Sub-Task2
Sub-Task3
Sub-Task4
Discreet
Total
Task
Figure 2: Navigation as a global task vs discretization of the
navigation task
A simple control law can be obtained by imposing
the exponential convergence of the task function to
zero:
˙e = −λ e so CLv = −λ e + C ˙s
∗
(5)
where λ is a positive scalar factor which tunes the
speed of convergence:
v = −λ (CL)
−1
e + (CL)
−1
C ˙s
∗
(6)
if C is setting to L
+
, then (CL) > 0 and the task
function converge to zero and, in the absence of local
minima and singularities, so does the error s − s
∗
. Fi-
nally substituting C by L
+
in equation (6), we obtain
the expression of the camera velocity that is sent to
the robot controller:
v = −λ L
+
(s − s
∗
(t)) + L
+
˙s
∗
(7)
Remember that the whole formulation is directly
applicable to the invariant visual servoing approach
changing s by q. As will be shown in the next section,
discontinuities in the control law will be produced by
the appearance/disappearance of image features dur-
ing the navigation of the robot. The answer to the
question: why are these discontinuities produced and
their solution are presented in the following section.
3 DISCONTINUITIES IN VISUAL
NAVIGATION
In this section, we describe more in details the dis-
continuity problem that occurs when some features go
in/out of the image during the vision-based control. A
simple simulation illustrate the effects of the disconti-
nuities on the control law and on the performances of
the visual servoing. The navigation of a mobile robot
is a typical example where this kind of problems are
produced.
ICINCO 2005 - ROBOTICS AND AUTOMATION
190
(a) Croquis of the autonomous navigation of the robot
1 2
3
4
5
6
7
Imageplaneattimek
2
4
5
6
7
8
9
11
10
Imageplaneattimek+1
1
3
2
4
5
7
6
2
4
5
6
7
8
9
10
11
attimek+1
attimek+1
Referencefeatures
Currentfeatures
s=( ,s, ,s,s,s,s)s s
1 32 4 5 6 7
T
s=( , )
* T
s
*
1
s, ,s,s,s,s
* * * * *
2 4 5 6 7
s
*
3
Remove
s=(s,s,s,s,s )
2 4 5 6 7
T
, s,s,s,s
8 9 10 11
Add
s=(s,s,s,s,s, )
* * * * * * T
2 4 5 6 7
s,s,s,s
* * * *
8 9 10 11
(b) Appearance/Disappearance of image features
from time k to k+1
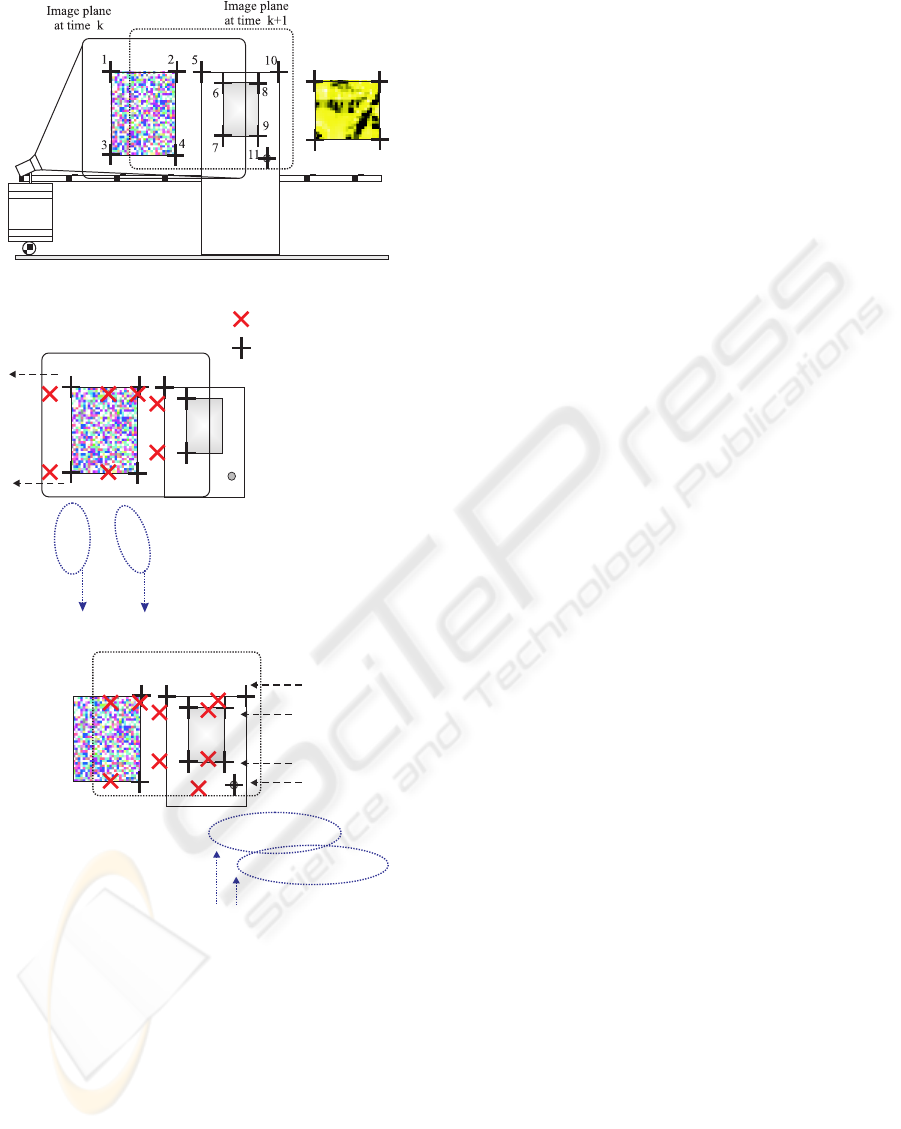
Figure 3: Navigation of a mobile robot controlled by visual
servoing techniques.
3.1 What happens when features
appear or disappear from the
image plane?
During autonomous navigation of the robot, some
features appear or disappear from the image plane so
they will must be added to or removed from the visual
error vector (Figure 3). This change in the error vec-
tor produces a jump discontinuity in the control law.
The magnitude of the discontinuity in control law de-
pends on the number of the features that go in or go
out of the image plane at the same time, the distance
between the current and reference features, and the
pseudoinverse of interaction matrix.
In the case of using the invariant visual servoing ap-
proach to control the robot, the effect produced by the
appearance/disappearance of features could be more
important since the invariant space Q used to compute
the current and the reference invariant points(q, q
∗
)
changes with features(Malis, 2002c).
4 CONTINUOUS CONTROL LAW
FOR NAVIGATION
In the previous section, the continuity problem of the
control law due to the appearance/disappearance of
features has been shown. In this section a solution is
presented. The section is organized as follows. First,
the concept of weighted features is defined. Then, the
definition of a smooth task function is presented. Fi-
nally, the reason to reformulate the invariant visual
servoing approach and its development is explained.
4.1 Weighted features
The key idea in this formulation is that every feature
(points, lines, moments, etc) has its own weight which
may be a function of image coordinates(u,v) and/or a
function of the distance between feature points and
an object which would be able to occlude them, etc
(Garc
´
ıa et al., 2004). To compute the weights, three
possible situations must be taking into account:
4.1.1 Situation 1: Changes of visibility through
the border of the image (Zone 2 in Figure 4
a)
To anticipate the changes of visibility of features
through the border, a total weight Φ
uv
is computed
as the product of the weights of the current and ref-
erence features which are function of their position in
the image (γ
i
uv
, γ
i
uv
∗
). The weight γ
i
uv
= γ
i
u
· γ
i
v
is
computed using the definition of the function γ
y
(x)
(γ
i
u
= γ
y
(u
i
) and γ
i
v
= γ
y
(v
i
) respectively) (Garc
´
ıa
et al., 2004).
4.1.2 Situation 2: The sudden appearance of
features on the center of the image (Zone 1
in Figure 4 b)
To take into account this possible situation, every new
features (current and reference) must be checked pre-
IMAGE-BASED AND INTRINSIC-FREE VISUAL NAVIGATION OF A MOBILE ROBOT DEFINED AS A GLOBAL
VISUAL SERVOING TASK
191
Zona1
Zona2
Zona2
Zone1
Zone2
Zone2
X
Y
s
i
s
i
*
s
j
*
s
j
Zone1
Zone2
Zone2
s
i
s
i
*
s
j
*
s
j
Image
Image
Zone1
Zone2
Zone1
Zone2
Zone2
X
Y
(a) Border of the image
MobileRobot(Teachingstep)
MobileRobot(InitialPose)
Zone2
Zone2
s
i
s
i
*
s
j
*
s
j
Image
(b) Center of the image
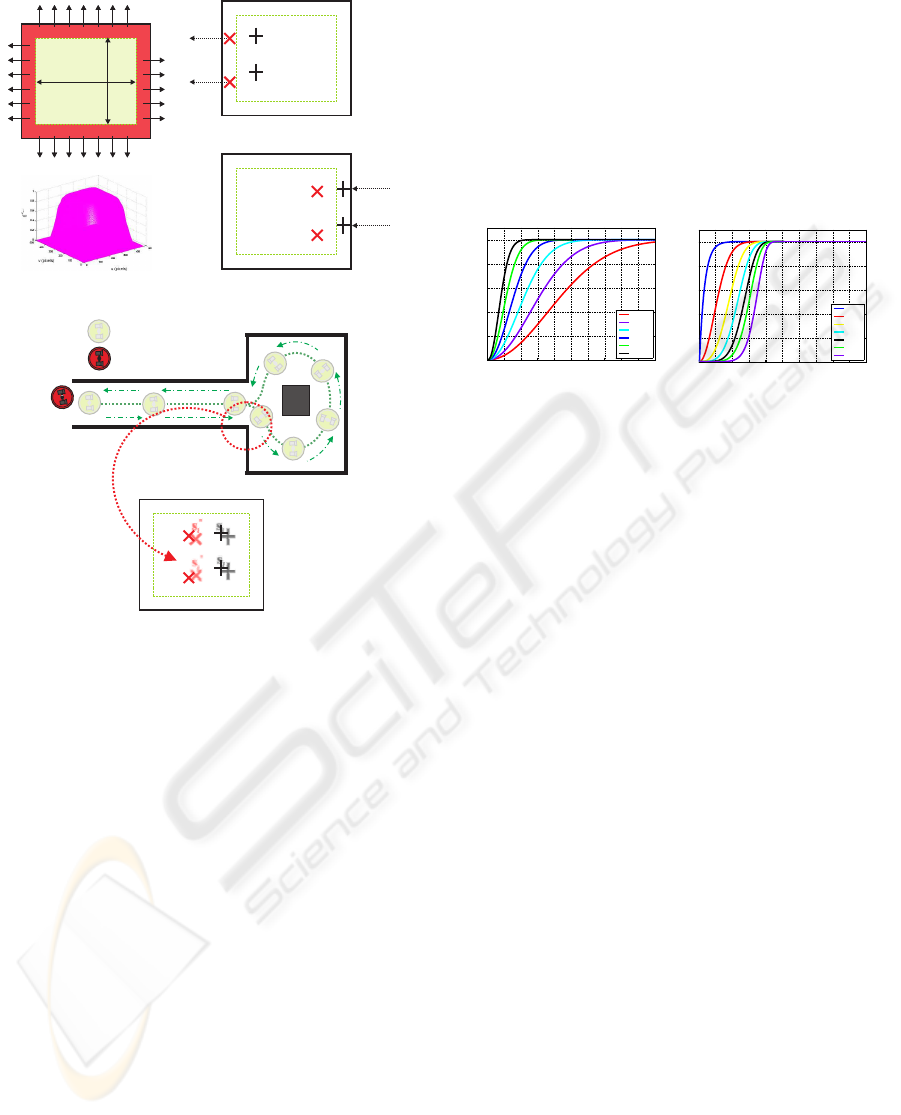
Figure 4: Appearance/Disappearance of image features
through the border and the center of the image during the
navigation of the mobile robot.
viously to known if they are in Zone 2 or Zone 1. If
the new features are in Zone 2, the appearance of the
features are considered in Situation 1. If they are in
Zone 1, a new weight function must be defined to add
these new features in a continuos way.
The weight function proposed Φ
i
a
is a exponential
function that tends to 1, reaching its maximum after
a certain number of steps which can be modified with
the α and β parameters (Figure 5):
Φ
i
a
(t) = 1 − e
−α · t
β
α, β > 0 (8)
4.1.3 Situation 3: The sudden disappearance of
features on the center of the image because
of a temporal or definitive occlusion (Zone
1 in Figure 4 b)
In this situation, the occlusions produced in the teach-
ing step on the Zone 1 are only considered since they
can be easily anticipated by the observation of refer-
ence features vector prerecorded previously.
To take into account this possible situation, a new
weight function must be defined to remove these fea-
tures from the current and reference vector in a con-
tinuos way. The weight function proposed Φ
i
o
is a
exponential function that tends to 0, reaching its min-
imum after a certain number of steps which can be
modified with the ν and σ parameters:
Φ
i
o
(t) = e
−ν · t
σ
ν, σ > 0 (9)
0 20 40 60 80 100 120 140 160 180 200
0
0.2
0.4
0.6
0.8
1
1.1
10
−2
s
Φ
a
α = 1
α = 2
α = 4
α = 8
α = 16
α = 32
β = 2
(a) Φ
a
(α)
0 20 40 60 80 100 120 140 160 180 200
0
0.2
0.4
0.6
0.8
1
10
−2
s
Φ
a
β = 1
β = 2
β = 3
β = 4
β = 5
β = 6
β = 8
α = 16
(b) Φ
a
(β)
Figure 5: Plotting Φ
a
in function of α and β.
4.1.4 Global weight function Φ
i
In this section, a global weight function Φ
i
which in-
cludes the three possible situations commented before
is presented. This function is defined as the product
of the three weight functions (Φ
i
uv
, Φ
i
a
y Φ
i
o
) which
takes into account the three possible situations:
Φ
i
= Φ
i
uv
· Φ
i
a
· Φ
i
o
where Φ
i
∈ [0, 1] (10)
4.2 Smooth Task function
Suppose that n matched points are available in the
current image and in the reference features stored.
Everyone of these points(current and reference) will
have a weight Φ
i
which can be computed as it’s shown
in the previous subsection 4.1. With them and their
weights, a task function can be built (Samson et al.,
1991):
e = CW (s − s
∗
(t)) (11)
where W is a (2n × 2n) diagonal matrix where its
elements are the weights Φ
i
of the current and refer-
ence features multiplied by the weights of the refer-
ence features.
The derivate of the task function will be:
˙e = CW (˙s − ˙s
∗
) + (C
˙
W +
˙
CW)(s − s
∗
(t)) (12)
Plugging the equation (˙s = L v) in (12) we obtain:
˙e = CW (Lv− ˙s
∗
)+(C
˙
W+
˙
CW)(s−s
∗
(t)) (13)
A simple control law can be obtained by imposing the
exponential convergence of the task function to zero
ICINCO 2005 - ROBOTICS AND AUTOMATION
192

(˙e = −λe), where λ is a positive scalar factor which
tunes the speed of convergence:
v = −λ (CWL)
−1
e + (CWL)
−1
CW˙s
∗
+
− (CWL)
−1
(C
˙
W +
˙
CW) (s − s
∗
(t))(14)
if C is setting to (W
∗
L
∗
)
+
,then (CWL) > 0 and
the task function converge to zero and, in the absence
of local minima and singularities, so does the error
s−s
∗
. In this case, C is constant and therefore
˙
C = 0.
Finally substituting C by (W
∗
L
∗
)
+
in equation (14),
we obtain the expression of the camera velocity that
is sent to the robot controller:
v = −(W
∗
L
∗
)
+
(λ W +
˙
W) (s − s
∗
(t)) +
+ (W
∗
L
∗
)
+
W˙s
∗
(15)
4.3 Visual servoing techniques
The visual servoing techniques used to carry out the
navigation are the image-based and the intrinsic-free
approaches. In the case of image-based visual ser-
voing approach, the control law (15) is directly ap-
plicable to assure a continuous navigation of a mobile
robot. On the other hand, when the intrinsic-free ap-
proach is used, this technique must be reformulated to
take into account the weighted features.
4.3.1 Intrinsic-free approach
The theoretical background about invariant visual ser-
voing can be extensively found in (Malis, 2002b;
Malis, 2002c). In this section, we modify the ap-
proach in order to take into account weighted features
(Garc
´
ıa et al., 2004).
Basically, the weights Φ
i
defined in the previous
subsection must be redistributed(γ
i
) in order to be
able to build the invariant projective space Q
γ
i
where
the control will be defined.
Similarly to the standard intrinsic-free visual ser-
voing, the control of the camera is achieved by
stacking all the reference points of space Q
γ
i
in a
(3n×1) vector s
∗
(ξ
∗
) = (q
∗
1
(t), q
∗
2
(t), · · · , q
∗
n
(t)).
Similarly, the points measured in the current cam-
era frame are stacked in the (3n×1) vector s(ξ) =
(q
1
(t), q
2
(t), · · · , q
n
(t)). If s(ξ) = s
∗
(ξ
∗
) then
ξ = ξ
∗
and the camera is back to the reference po-
sition whatever the camera intrinsic parameters.
In order to control the movement of the camera,
we use the control law (15) where W depends on
the weights previously defined and L is the interac-
tion matrix. The interaction matrix depends on cur-
rent normalized points m
i
(ξ) ∈ M (m
i
can be com-
puted from image points m
i
= K
−1
p
i
), on the in-
variant points q
i
(ξ) ∈ Q
γ
, on the current depth dis-
tribution z(ξ) = (Z
1
, Z
2
, ..., Z
n
) and on the current
redistributed weights γ
i
. The interaction matrix in the
weighted invariant space (L
γ
i
q i
= T
γ
i
mi
(L
mi
−C
γ
i
i
))is
obtained like in (Malis, 2002a) but the term C
γ
i
i
must be recomputed in order to take into account the
redistributed weights γ
i
.
5 EXPERIMENTS IN A VIRTUAL
INDOOR ENVIRONMENT
Exhaustive experiments have been carried out using
a virtual reality tool for modeling an indoor envi-
ronment. To make more realistic simulation, errors
in intrinsic and extrinsic parameters of the camera
mounted in the robot and noise in the extraction of
image features have been considered. An estimation
b
K of the real matrix K has been used with an error
of 25% in focal length and a deviation of 50 pixels
in the position of the optical center. Also an esti-
mation
b
T
RC
of the camera pose respect to the ro-
bot frame has been computed with a rotation error of
uθ = [3.75 3.75 3.75]
T
degr ees and translation er-
ror of t = [2 2 0]
T
cm. An error in the extraction of
current image features has been considered by adding
a normal distribution noise to the accurate image fea-
tures extracted.
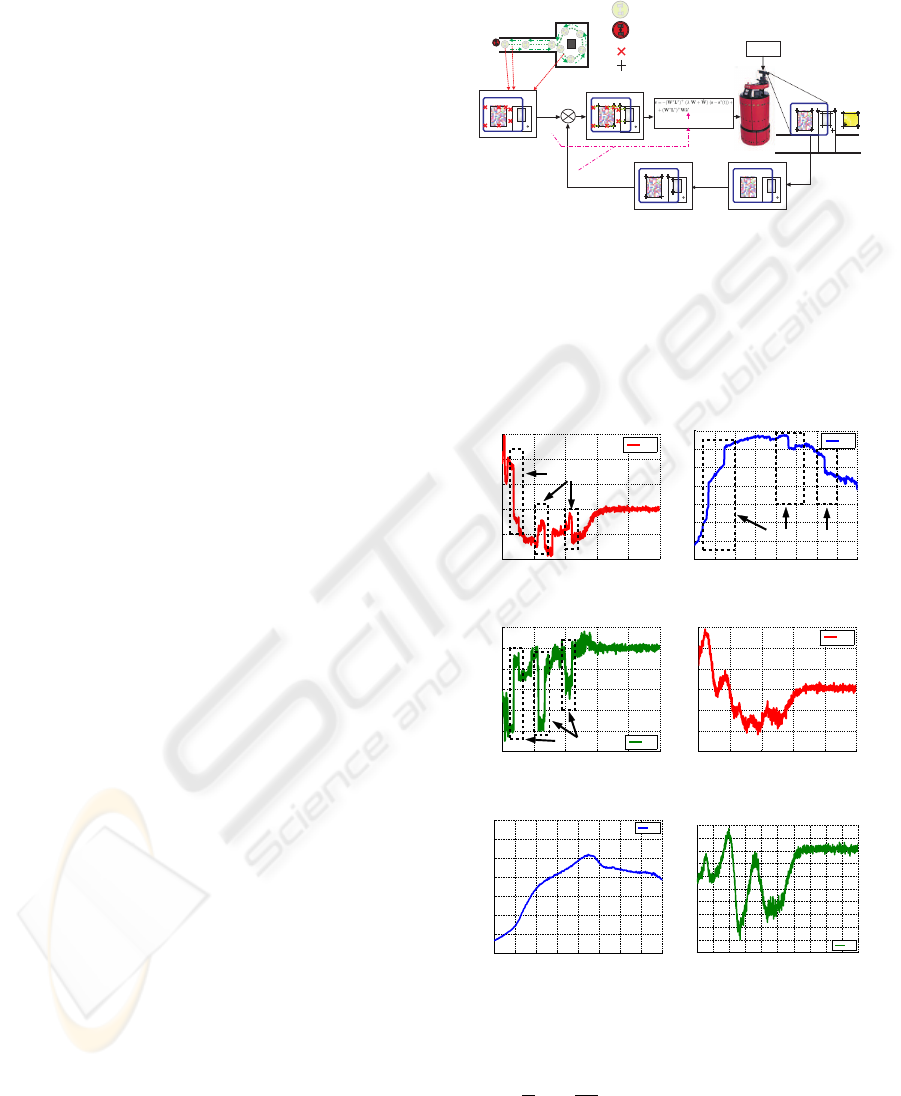
In Figure 7, the control signals sent to the robot
controller using the classical image-based approach
and the image-based approach with weighted features
are shown. In Figure 7 (a,b,c), details of the control
law using the classical image-based approach, where
the discontinuities can be clearly appreciated, are pre-
sented. To show the improvements of the new formu-
lation presented in this paper, the control law using
the image-based with weighted features can be seen
in Figure 7 (d,e,f).
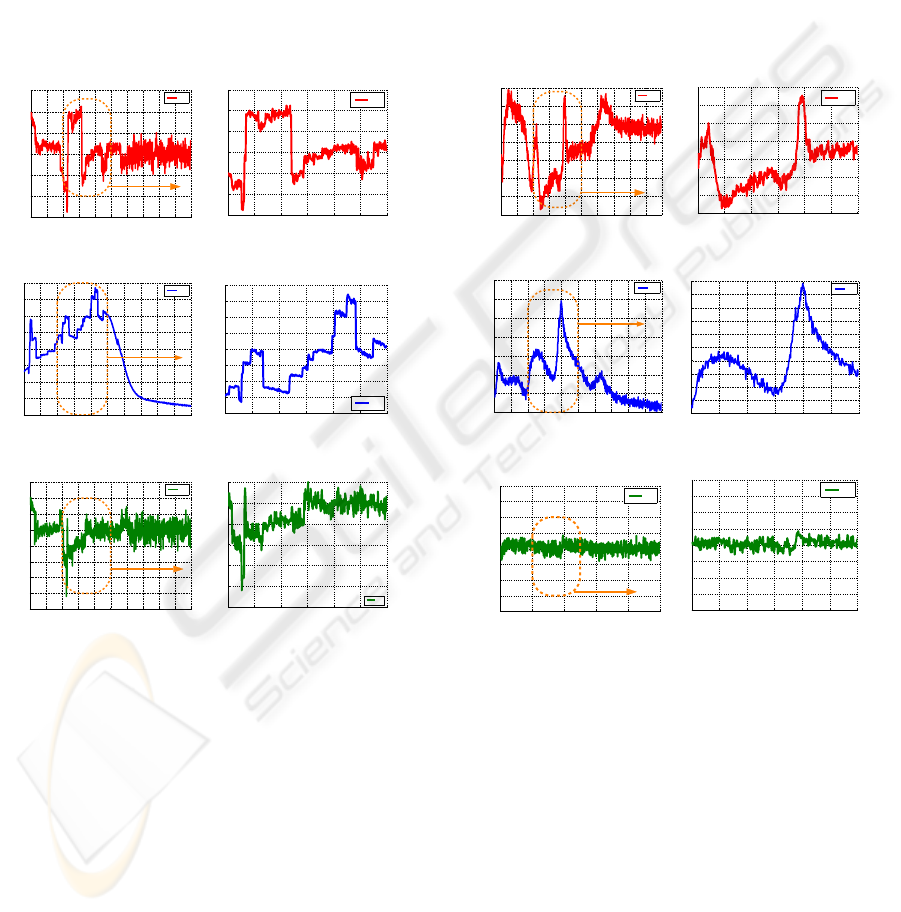
The same experiment, but in this case using the
intrinsic-free visual servoing approach, is performed.
In Figure 8 , the control signals sent to the robot con-
troller using the intrinsic-free approach and some de-
tails, where the discontinuities can be clearly appre-
ciated, are shown. The improvements of the new for-
mulation of the intrinsic-free approach with weighted
features are presented in Figure 9. The same details
of the control law shown in Figure 8 are presented
in Figure 9. Comparing both figures and their details,
the continuity of the control law is self-evident despite
of the noise in the extraction of image features.
Also in (Garc
´
ıa et al., 2004), a comparison between
this method and a simple filtration of the control law
was presented. The results presented in that paper cor-
roborate that the new approach with weighted features
to the problem works better than a simple filter of the
control signals.
IMAGE-BASED AND INTRINSIC-FREE VISUAL NAVIGATION OF A MOBILE ROBOT DEFINED AS A GLOBAL
VISUAL SERVOING TASK
193
6 CONCLUSIONS
In this paper the originally definition of the visual
navigation as a global visual control task is pre-
sented. It implies continuity problems produced by
the changes of visibility of image features during the
navigation which have been solved by the definition
of a smooth task function and a continuous control
law obtained from it. The results presented corrobo-
rate that the new approach is continuous, stable and
works better than a simple filter of the control signals.
The validation of this results with a real robot is on
the way by using a B21r mobile robot from iRobot
company.
REFERENCES
Garc
´
ıa, N., Malis, E., Reinoso, O., and Aracil, R. (2004).
Visual servoing techniques for continuous navigation
of a mobile robot. In 1st International Conference
on Informatics in Control, Automation and Robotics,
volume 1, pages 343–348, Setubal, Portugal.
Hutchinson, S. A., Hager, G. D., and Corke, P. I. (1996). A
tutorial on visual servo control. IEEE Trans. Robotics
and Automation, 12(5):651–670.
Malis, E. (2002a). Stability analysis of invariant visual
servoing and robustness to parametric uncertainties.
In Second Joint CSS/RAS International Workshop on
Control Problems in Robotics and Automation, Las
Vegas, Nevada.
Malis, E. (2002b). A unified approach to model-based
and model-free visual servoing. In European Confer-
ence on Computer Vision, volume 2, pages 433–447,
Copenhagen, Denmark.
Malis, E. (2002c). Vision-based control invariant to camera
intrinsic parameters: stability analysis and path track-
ing. In IEEE International Conference on Robotics
and Automation, volume 1, pages 217–222, Washing-
ton, USA.
Malis, E. and Cipolla, R. (2000). Self-calibration of zoom-
ing cameras observing an unknown planar structure.
In Int. Conf. on Pattern Recognition, volume 1, pages
85–88, Barcelona, Spain.
Matsumoto, Y., Inaba, M., and Inoue, H. (1996). Vi-
sual navigation using view-sequenced route represen-
tation. In IEEE International Conference on Robotics
and Automation (ICRA’96), volume 1, pages 83–88,
Minneapolis, USA.
Samson, C., Le Borgne, M., and Espiau, B. (1991). Robot
Control: the Task Function Approach. volume 22 of
Oxford Engineering Science Series.Clarendon Press.,
Oxford, UK, 1st edition.
RobotControl
Zoom
Referencefeatures
recordedinrobotmemory
s*(t)
s
ReferenceFeatures
CurrentFeatures
Features
1 2
3
4
5
6
7
ImagePlane
ImageAdquisition
ImagePlane
1
3
2
4
5
7
6
ImagePlane
1 2
3
4
5
6
7
1
3
2
4
5
7
6
ImagePlane
FeatureError
1 2
3
4
5
6
7
8
9
11
10
12
13
MobileRobot(ReferencePose). Teachingstep
MobileRobot(CurrentPose)
.....
F
i
W
Figure 6: Block diagram of the controller proposed
0 200 400 600 800 1000
−0.01
−0.005
0
0.005
0.01
0.015
Iterations number
ω
ω
z
Discontinuities
(a) ω
z
0 50 100 150 200 250 300 350 400
0.52
0.54
0.56
0.58
0.6
0.62
0.64
0.66
Iterations number
v
v
x
Discontinuities
(b) v
x
0 200 400 600 800 1000
−0.025
−0.02
−0.015
−0.01
−0.005
0
0.005
Iterations number
v
v
y
Discontinuities
(c) v
y
0 200 400 600 800 1000
−0.015
−0.01
−0.005
0
0.005
0.01
0.015
Iterations number
ω
ω
z
(d) ω
z
0 50 100 150 200 250 300 350 400
0.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
Iterations number
v
v
x
(e) v
x
0 100 200 300 400 500 600 700 800 900 1000
−0.04
−0.035
−0.03
−0.025
−0.02
−0.015
−0.01
−0.005
0
0.005
0.01
Iterations number
v
v
y
(f) v
y
Figure 7: Control law: Classical image-based approach (a-
b-c) and image-based approach with weighted features (d-e-
f).The translation and rotation speeds are measured respec-
tively in
m
s
and
deg
s
ICINCO 2005 - ROBOTICS AND AUTOMATION
194
0 100 200 300 400 500 600 700 800 900 1000
−0.015
−0.01
−0.005
0
0.005
0.01
0.015
Iterations number
ω
ω
z
Detail
(a) ω
z
200 250 300 350 400 450 500
−0.015
−0.01
−0.005
0
0.005
0.01
0.015
Iterations number
ω
ω
z
(b) Details
0 100 200 300 400 500 600 700 800 900 1000
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Iterations number
v
v
x
Detail
(c) v
x
200 250 300 350 400 450 500
0.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8
Iterations number
v
v
x
(d) Details
0 100 200 300 400 500 600 700 800 900 1000
−0.025
−0.02
−0.015
−0.01
−0.005
0
0.005
0.01
0.015
Iterations number
v
v
y
Detail
(e) v
y
200 250 300 350 400 450 500
−0.025
−0.02
−0.015
−0.01
−0.005
0
0.005
Iterations number
v
v
y
(f) Details
Figure 8: Discontinuities in the control law: Intrinsic-free
approach.
0 100 200 300 400 500 600 700 800 900 1000
−0.025
−0.02
−0.015
−0.01
−0.005
0
0.005
0.01
Iterations number
ω
ω
z
Detail
(a) ω
z
200 250 300 350 400 450 500
−0.025
−0.02
−0.015
−0.01
−0.005
0
0.005
0.01
Iterations number
ω
ω
z
(b) Details
0 100 200 300 400 500 600 700 800 900 1000
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Iterations number
v
v
x
Detail
(c) v
x
200 250 300 350 400 450 500
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
Iterations number
v
v
x
(d) Details
0 200 400 600 800 1000
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
Iterations number
v
v
y
Detail
(e) v
y
200 250 300 350 400 450 500
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
Iterations number
v
v
y
(f) Details
Figure 9: Continuous control law: Intrinsic-free approach
with weighted features.
IMAGE-BASED AND INTRINSIC-FREE VISUAL NAVIGATION OF A MOBILE ROBOT DEFINED AS A GLOBAL
VISUAL SERVOING TASK
195
