
APPLYING SIGNAL PROCESSING TECHNIQUES TO WATER
LEVEL ANOMALY DETECTION
Carl Steidley, Richard Rush, David Thomas, Phillipe Tissot, Alex Sadovski, Ray Bachnak
Texas A&M University Corpus Christi
Corpus Christi, TX 78412 5825
USA
Keywords: Environmental monitoring and control, Filtering, Change detection.
Abstract: The Texas Coastal Ocean Observation Network (TCOON) consists of more than 50 data gathering stations
located along the Texas Gulf coast from the Louisiana to Mexico borders. Data sampled at these stations
include: precise water levels, wind speed and direction, atmospheric and water temperatures, barometric
pressure, and water currents. The measurements collected at these stations are often used in legal
proceedings such as littoral boundary determinations; therefore data are collected according to National
Ocean Service standards. Some stations of TCOON collect parameters such as turbidity, salinity, and other
water quality parameters. All data are transmitted back to Texas A&M University Corpus Christi (A&M-
CC) at multiples of six minutes via line-of-sight packet radio, cellular phone, or GOES satellite, where they
are then processed and stored in a real-time, web-enabled database. TCOON has been in operation since
1988. This paper describes a software project based upon signal processing techniques to be utilized with
the TCOON meteorological database to detect spikes in water level. Water level readings are frequently
victim to abnormal water levels caused by ship wakes, affected equipment scrambled by thunder, or
corrupted by transmission errors. Since these water levels are the bases for a number of research
calculations, such as, oil-spill response, navigation safety, environmental research, and recreation, it is
essential to be able to make these water level data as correct and spike free as possible.
1 INTRODUCTION
The TCOON filter system consists of two
implementations of spike detection algorithms
which accept parameters from the TCOON
meteorological database or series of data and
return the location of spikes within the processed
series, since spikes represent inaccurate data it is
imperative to remove this data from our research
database (Krukowski 2000, Michaud, 2001). We
discuss these methods below and then provide a
comparison of results.
2 FINITE IMPULSE RESPONSE
METHOD
2.1 Theory
Digital filters can have an 'arbitrary response':
meaning, the attenuation is specified at certain
chosen frequencies, or for certain frequency bands.
These filters are also characterized by their
response to an impulse: a signal consisting of a
single value followed by zeroes. The impulse
response is an indication of how long the filter
takes to settle into a steady state: it is also an
indication of the filter's stability - an impulse
response that continues oscillating in the long term
indicates the filter may be prone to instability. The
impulse response defines the filter just as well as
does the frequency response. Output from a digital
filter is made up from previous inputs and previous
outputs, using the operation of convolution. As
indicated in the following equation, two
303
Steidley C., Rush R., Thomas D., Tissot P., Sadovski A. and Bachnak R. (2005).
APPLYING SIGNAL PROCESSING TECHNIQUES TO WATER LEVEL ANOMALY DETECTION.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Signal Processing, Systems Modeling and
Control, pages 303-309
DOI: 10.5220/0001152503030309
Copyright
c
SciTePress
convolutions are involved: one with the previous
inputs, and one with the previous outputs. In each
case the convolving function is called the filter
coefficients.
Since filtering is a frequency selective
process, the important thing about a digital filter is
its
frequency response. The filter's frequency response
can be calculated from its filter equation as
follows:
The frequency response H(f) is a continuous
function, even though the filter equation is a
discrete summation. While it is nice to be able to
calculate the frequency response given the filter
coefficients, when designing a digital filter we
want to do the inverse operation: that is, to
calculate the filter coefficients having first defined
the desired frequency response. So we are faced
with an inverse problem. Sadly, there is no general
inverse solution to the frequency response
equation. To make matters worse, we want to
impose an additional constraint on acceptable
solutions. Usually, we are designing digital filters
with the idea that they will be implemented on
some piece of hardware. This means we usually
want to design a filter that meets the requirement
but which requires the least possible amount of
computation: that is, using the smallest number of
coefficients. So we are faced with an insoluble
inverse problem, on which we
wish to impose
additional constraints. This is why digital filter
design is more an art than a science: the art of
finding an acceptable compromise between
conflicting constraints. If we have a powerful
computer and time to take a coffee break while the
filter calculates, the small number of coefficients
may not be important - but this is a pretty sloppy
way to work and would be more of an academic
exercise than a piece of engineering (Kuo, 2001).
It is much easier to approach
the problem of
calculating filter coefficients if we simplify the
filter equation so that we only have to deal with
previous inputs (that is, we exclude the possibility
of
feedback). The filter equation is then simplified
as follows:
If such a filter is subjected to an impulse (a
signal consisting of one value followed by zeroes)
then its output must necessarily become zero after
the impulse has run through the summation. So the
impulse response of such a filter must necessarily
be finite in duration. Such a filter is called a Finite
Impulse Response filter or FIR filter. The filter's
frequency response is also simplified, because all
the bottom half goes away, as indicated in the
following equation:
It so happens that this frequency response is
just the Fourier transform of the filter coefficients.
The inverse solution to a Fourier transform is well
known: it is simply the inverse Fourier transform.
So the coefficients for an FIR filter can be
calculated simply by taking the inverse Fourier
transform of the desired frequency response.
To avoid having many small coefficients, we
can truncate or discard the small valued
coefficients. Truncating the filter coefficients
means we have a truncated signal, and a truncated
signal has a broad frequency spectrum. So
truncating the filter coefficients means the filter's
frequency response can only be defined coarsely.
Luckily, there is a way to sharpen up the frequency
spectrum of a truncated signal, by applying a
window function. So after truncation, we can apply
a window function to sharpen up the filter's
frequency response. This provides us with an even
better algorithm for calculating FIR filter
coefficients, the so-called window method of filter
design.
FIR filter coefficients can be calculated using
the window method:
• pretend we don't mind lots of filter
coefficients
• specify the desired frequency response
using lots of samples
• calculate the inverse Fourier transform
• this gives us a lot of filter coefficients
• so truncate the filter coefficients to give
us less
Output
Previous input previous output
Y[n] = ∑ c[k] * x[n-k] + ∑ d[j] * y[n-j] (1)
∑ c[k] * exp(-2Πjk(f∆))
H(f) = ------------------------- (2)
1 - ∑ d[j] * exp(-2Πjk(f∆))
Y[n] = ∑ c[k] * x[n-k] (3)
∑ c[k] * exp(-2Πjk(f∆))
H(f) = ------------------------- (4)
1 - ∑ d[j] * exp(-2Πjk(f∆))
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
304
• apply a window function to sharpen up
the filter's frequency response
• then calculate the Fourier transform of the
truncated set of coefficients to see if it
still matches our requirement
However, no matter how many filter
coefficients you throw at it, you cannot improve on
a fixed window's attenuation. This means that the
art of FIR filter design by the window method lies
in an appropriate choice of window function. For
example, if you need an attenuation of 20 dB or
less, then a rectangle window is acceptable. If you
need 43 dB you are forced to choose the Hamming
window, and so on. Sadly,
the better window
functions need more filter coefficients before their
shape can be adequately defined. So if you need
only 25 dB of attenuation you should choose a
triangle window function which will give you this
attenuation: the Hamming window, a form of
generalized cosine window, for example, would
give you more attenuation but require more filter
coefficients to be adequately defined - and so
would be wasteful of computer power.
The art of FIR filter design by the window method
lies in choosing the window function which meets
your requirement with the minimum number of
filter coefficients. You may notice that if you want
an attenuation of 30 dB you are in trouble: the
triangle window is not good enough but the
Hamming window is too good (and so uses more
coefficients than you need). The Kaiser window
function is unique in that its shape is variable. A
variable parameter defines the shape, so the Kaiser
window ,described mathematically below, is
unique in being able to match precisely the
attenuation you require without overperforming.
FIR filter coefficients can be calculated using
the window method. But the window method does
not correspond to any known form of optimization.
In fact it can be shown that the window method is
not optimal - by which we mean, it does not
produce the lowest possible number of filter
coefficients that just meets the requirement. The
art of FIR filter design by the window method lies
in choosing the window function which meets your
requirement with the minimum number of filter
coefficients. If the window method design is not
good enough we have two choices:
• use another window function and try
again
• do something clever
The Remez Exchange algorithm is something
clever. It uses a mathematical optimization
method. Thus, using the Remez Exchange
algorithm to design a filter we might proceed
manually as follows:
• choose a window function that we think
will do
• calculate the filter coefficients
• check the actual filter's frequency
response against the design goal
• if it overperforms, reduce the number of
filter coefficients or relax the window
function design
• try again until we find the filter with the
lowest number of filter coefficients
possible
In a way, this is what the Remez Exchange
algorithm does automatically. It iterates between
the filter coefficients and the actual frequency
response until it finds the filter that just meets the
specification with the lowest possible number of
filter coefficients. Actually, the Remez Exchange
algorithm never really calculates the frequency
response: but it does keep comparing the actual
with the design goal.
The Remez method produces a filter which
just meets the specification without
overperforming. Many of the window method
designs actually perform better as you move
further away from the passband: this is wasted
performance, and means they are using more filter
coefficients than they need. Similarly, many of the
window method designs actually perform better
than the specification within the passband: this is
also wasted performance, and means they are using
more filter coefficients than they need. The Remez
method performs just as well as the specification
but no better: one might say it produces the worst
possible design that just meets the specification at
the lowest possible cost (Proakis, 2003).
w
h
[i] = 0.54 – 0.46 cos(2∏i / M) (5)
The Hamming window. These windows run from i =
0 to M, for a total of M+1 points.
_________
I
0
(Πα√1 – (2k/n-1)
2
) if 0≤k≤n (6)
I
0
(Πα)
w
k
=
0 otherwise
APPLYING SIGNAL PROCESSING TECHNIQUES TO WATER LEVEL ANOMALY DETECTION
305
2.2 Applying The Theory To
TCOON Database Data
TCOON data is recorded with a frequency of one
value every six minutes (or 0.00278 values a
second), so 10 consecutive values equal one hour’s
worth of data. Utilizing a filter design software
system which is an implementation of the Remez
Exchange Algorithm we determined a set of
coefficients to operate over 10 consecutive data
points that occur every six minutes (a frequency of
0.00278 Hz), that is, one hour of TCOON water
level data (
Sadovski, 2004, Bowles, 2004, Sadovski,
2003, Steidley, 2004) .
These coefficients are multiplied against a
sliding window applied to the data series. The
result of the filter for a given value is the sum of
the current value times the first coefficient, plus
the value before the current value times the second
coefficient, plus the value before the current value
times the second coefficient, plus the value two
values before the current value times the third
coefficient, etc. until all ten coefficients have been
used (See Figure 1).
Since the filter requires nine preceding values
to calculate the filtered equivalent for a value, the
first nine values in a series cannot be processed
and are “lost” in terms of the resulting series. That
is, this process applies a phase shift to the data
series. So, the entire filtered data series is reversed
and run through the FIR filter a second time, with
the coefficients, in response to this phase shift.
Because each pass through the filter discards the
first nine values in a series, the original data series
loses nine values at both ends. This means that to
have at least a single value in the result of the two
passes through the filter, a minimum of 19 values,
or one hour and fifty four minutes’ worth of data
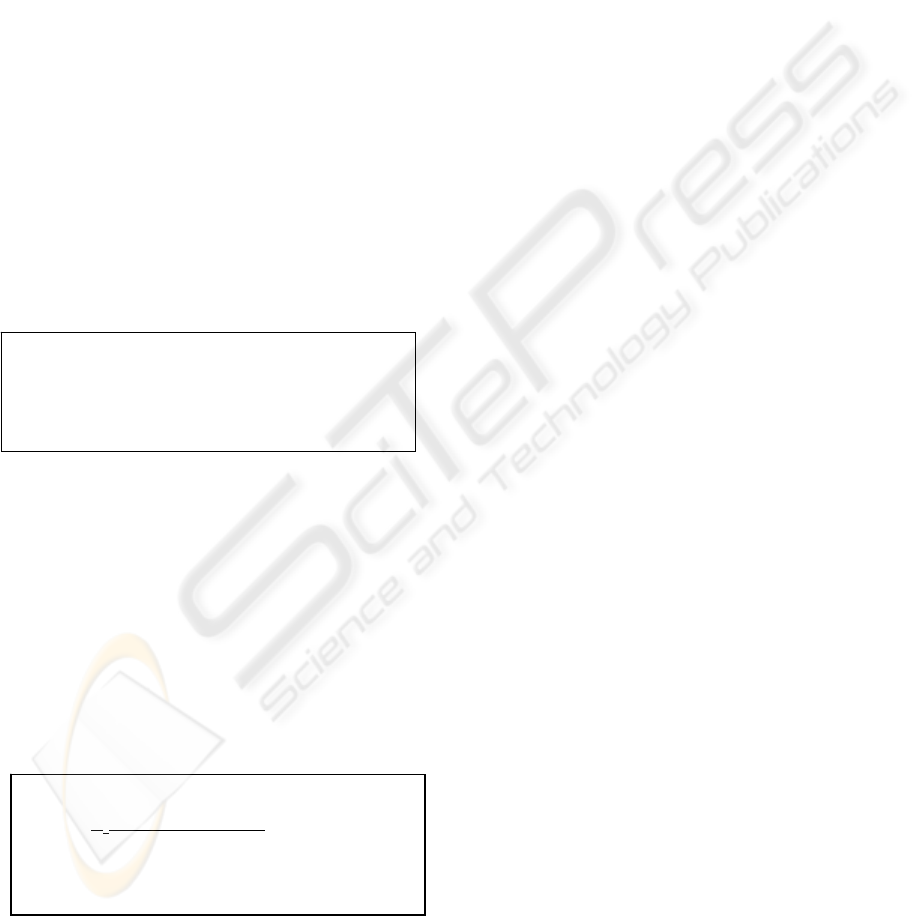
must be provided. After processing raw data
(Figure 2) through the FIR filter twice, data that
behaves normally with respect to preceeding data,
is minimized, whereas abnormally behaving data
(Figure 3) remains significant.
Figure 2: Primary Water Level Data
Figure 3: Filtered Data
To remove the data that cannot be spikes from
the output of filter we compute the root mean
square value of the filtered data and discard all
values that are less than or equal to the RMS value
(Figure 4). The data point with the greatest
absolute value in each group is labeled a spike
(Figure 5).
Figure 4: Significant Filtered Values
result = FIR(series)
result = FIR(reverse result)
rms = RMS(result)
for each in result
if result{current] is <= rms
result[current] = 0
if result[current] == 0 and result[spike] != 0
push spikes, spike
spike = 0
if result[current] is > result[spike]
spike = current
return spikes
Figure 1: Finite Impulse Response Filter Psuedocode
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
306
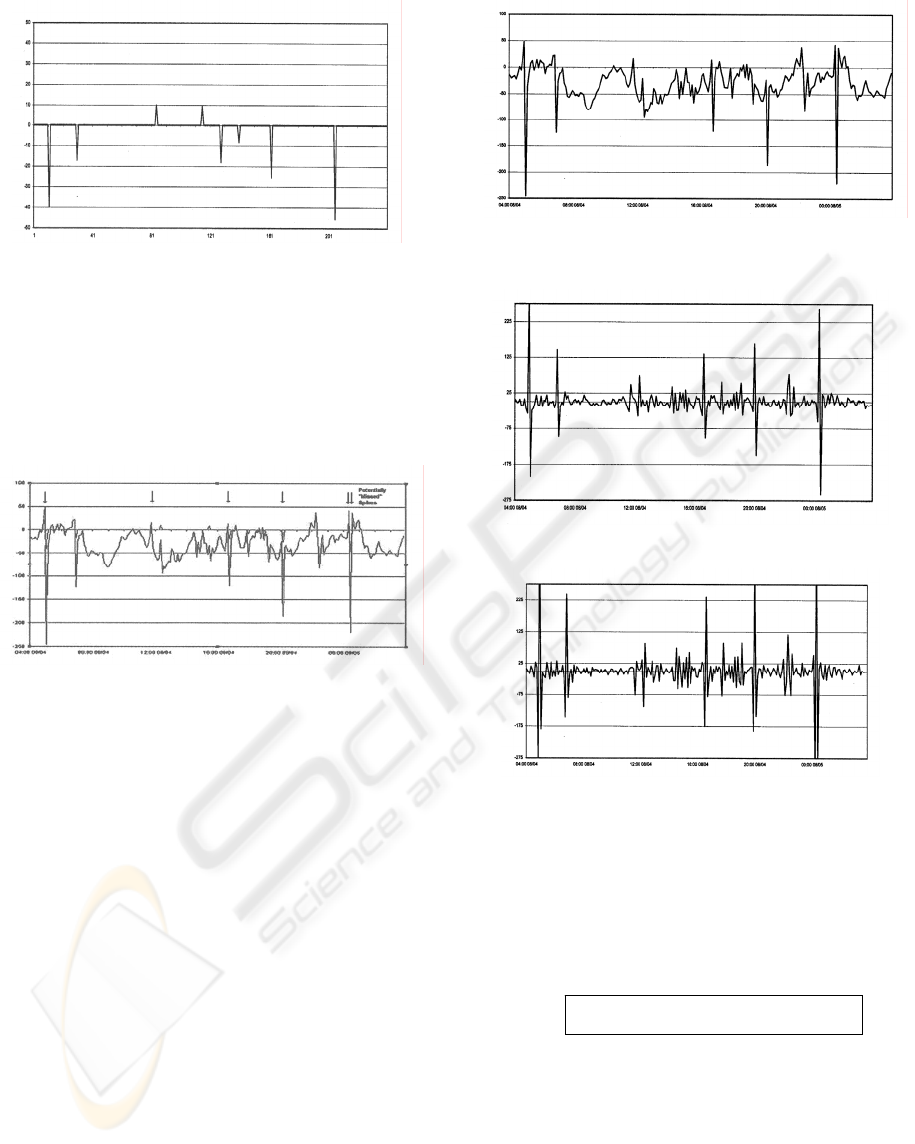
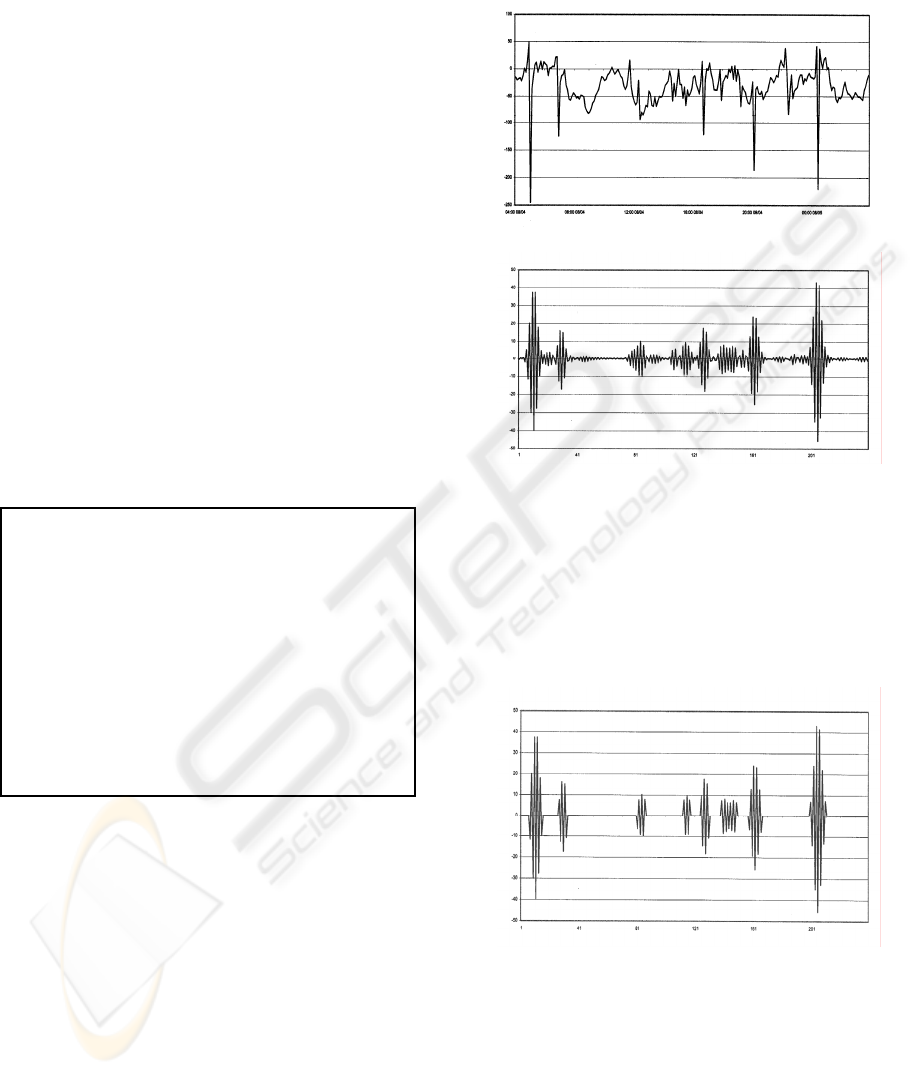
Figure 5: Greatest Filtered Values
Since we are detecting only the greatest value
in each group of potential spikes, two consecutive
spikes, one spike that is long enough to appear in
two data acquisition values, or a separate and
smaller spike that occurs within the shadow of a
larger spike can escape detection (Figure 6).
Figure 6: Primary Water Level Data Including Spikes
and Potentially “Missed” Spikes
3 DIFFERENCE EXAMINATION
METHOD
The difference examination method is dependant
upon the second difference of the data series. As
the difference between two points represents the
change between those two points over one
increment of time (six minutes in the case of this
data), the second difference represents the change
between changes. The algorithm for this method
first builds a series out of the differences between
the original series’ values and then builds a third
series from the differences between the values in
the second constructed series (Figures 7, 8, 9).
Figure 7: Primary Water Level
Figure 8: First Differences
Figure 9 Second Differences
After computing the second differences of the
original data series, the root mean square of the
second difference is computed. Any value greater
than twice the root mean square of the second
difference is labeled a spike (Figure 10).
RMS
diff
2
= RMS
1
2
+ RMS
1
2
(7)
APPLYING SIGNAL PROCESSING TECHNIQUES TO WATER LEVEL ANOMALY DETECTION
307
Figure 10: Second Differences Greater than Twice the
Root Mean Square
4 COMPARISON OF THE TWO
SPIKE DETECTION
METHODS
To determine the presence of spikes within a data
set generally requires the use of some subjective
evaluation procedure, we choose to present the
data visually in the form of graphs. Further, since
the determination of spikes in actual recorded data
is difficult at best, we chose to evaluate and
compare the two spike detection methods on
simulated data. We created software
which
generates spike data psuedorandomly. We can,
therefore, execute both methods on a data series
simulating the same time and place repreatedly, the
combined results of which can be used to generate
some basic statistics.
In our tests, both detection methods were
applied to forty different series of data generated
by our spike simulator. Each data series had one
percent of its data converted to spikes. Table 1
illustrates the results of the execution.
5 DISCUSSION
The spikes between 25 and 34 cm are the largest
spikes applied to the data and are, therefore, the
most important spikes to detect. Spikes between
15 and 24 cm are desirable to detect, while spikes
between 5 and 14 cm are negligible and are the
least important to locate. A low number of data
points incorrectly identified as spikes is important,
since data points identified as spikes will be
removed from the TCOON database. Too many
values incorrectly identified will corrupt the use
and value of the TCOON database.
Table 1: Mean Average Spike Detection Results
FIR DIFF FIR % DIFF %
Number of
Data Points
7440 7440 - -
Number of
Spikes
Found
70.35 172.03 - -
25 cm to 34
cm Spikes
found
23.00 24.52 93.08 99.46
25 cm to 34
cm Spikes
missed
1.65 0.12 6.92 0.54
15 cm to 24
cm Spikes
found
22.57 24.38 90.40 97.45
15 cm to 24
cm Spikes
missed
2.42 0.62 9.60 2.55
5 cm to 14
cm Spikes
found
20.35 3.73 81.95 14.55
5 cm to 14
cm Spikes
missed
4.58 21.20 18.05 85.45
Incorrectly
identified
spikes
4.42 119.40 6.30 69.42
5.1 Finite Impulse Response
Method
The results depicted in Table 1 indicate that the
Finite Impulse Response Method behaves fairly
well. Although an average of 93.08% of the major
spikes were found, it is likely that many of the
major spikes that were missed were hidden by
proximity to other, larger spikes. Repeated
applications of this method to the same data series,
with detected data spikes removed, will
cumulatively improve its performance. Similarly,
this method performed well, but not excellently,
when detecting smaller spikes (those between 5
and 24 cm), performance that is likely to
cumulatively improve over repeated applications.
The number of data spikes incorrectly identified as
spikes was low: 6.3% of the spikes it found were
not spikes; and average of 4.42 incorrect spikes
were found in an entire month’s worth of data
(Bowles, 2004).
5.2 Difference Examination
Method
As indicated in Table 1, the Difference
Examination Method does not perform as well as
the FIR method. This method found nearly all of
ICINCO 2005 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
308

the major (99.46%) spikes and significant
(97.45%) spikes. It missed a large majority
(85.45%) of the small spikes. This method
detected nearly 7% more spikes 15 cm or greater
that the FIR method. However, this method falters
severely in its error rate. 70% of the spikes
detected by this method were incorrect. Although
this would result in only 1.6% of the data set being
falsely identified as a spike, we feel this is a
dangerously high error rate.
Figure 11: Simulated Water Level Data for 24 Hour
Period
6 CONCLUSIONS
Two different software methods for detecting
spikes in water level data have been implemented.
The first of these makes use of a finite impulse
response filter. A data series is passed through the
filter forwards, then backwards; this process
minimizes values within the series that appear
normal with respect to the previous hour’s values
while exacerbating values that are not similar to
the previous hour’s values. The remaining
significant values are then examined and the
largest value within each set of contiguous
significant values is labeled as a spike. The second
method deals with second differences of the data
series being examined. In this method, values that
are significantly larger than the second derivative
of the recorded data is labeled a spike. For our
purposes the FIR method outperforms the second
differences method.
ACKNOWLEDGEMENT
This project is partially supported by National
Aeronautics and Space Administration grant
NCC5-517.
REFERENCES
Artur Krukowski, Izzet Kale: DSP System Design:
Complexity Reduced Iir Filter Implementation for
Practical Applications, Kluwer Academic
Publishers, 2000.
Michaud, P., R.S. Dannelly, and G. Jeffress, C. Steidley,
“Real-Time Data Collection and the Texas Coastal
Ocean Observation Network”, Proceedings of the
Emerging Technologies Conference of the
Instrumentation, Systems, and Automation
Conference, CD-ROM Session ETCON19,
September 2001.
Sen M. Kuo, Woon-Seng Gan: Digital Signal
Processors: Architectures, Implementations, and
Applications, Prentice Hall, 2001.
John Proakis, Dimitris Manolakis: Digital Signal
Processing - Principles, Algorithms and
Applications, Pearson, 2003.
Sadovski, Alexey, Carl Steidley, Aimee Mostella,
Phillipe Tissot, “Intergration of Regression and
Harmonic Analysis to Predict Water Levels in
Estuaries and Shallow Water of the Gulf of Mexico,”
WSEAS Transactions on Systems, pp. 2686-2693,
Vol. 3, Issue 8, October 2004.
Bowles, Zack, Alexey Sadovski,Phillipe Tissot, Scott
Duff, Patrick Michaud, Carl Steidley, "Engineered
training sets: enhancing the learning power of
artificial neural networks for water level forecasts",
Proceedings of XIV International Symposium on
Mathematical Methods Applied to the Sciences, pp
30-31, San Jose, Costa Rica, February 2004.
Sadovski, Alexey L., Phillipe Tissot, Gary Jeffress, Carl
Steidley, "Neural Network and Statistics-Based
Systems for Predictions in Coastal Studies",
Intelligent Engineering Systems Through Artificial
Neural Networks, Volume 1, 3, pp 689-694, ASME
Press, New York, 2003.
Steidley, C., A. Sadovsky, R. Bachnak, and K. Torres,
“Modeling Methods for Coastal Environmental
Studies,” Proc. 19th International Conference on
Computer Applications and Their Applications
(CATA 2004), pp. 59-64, March18-20, 2004,
Seattle, WA.
APPLYING SIGNAL PROCESSING TECHNIQUES TO WATER LEVEL ANOMALY DETECTION
309
