
AN INNOVATIVE VOCAL INTERFACE FOR
AUTOMOTIVE INFORMATION SYSTEMS
Gennaro Costagliola, Sergio Di Martino, Filomena Ferrucci
Dipartimento di Matematica e Informatica, Università degli Studi di Salerno,via S. Allende, Baronissi, Italy
Giuseppe Oliviero, Umberto Montemurro, Alessandro Paliotti
Elasis S.C.p.A. - Veicolo SEE, Via ex-Aeroporto, Pomigliano D'Arco (NA), Italy
Keywords: HCI, Interface Usability, Mobile Computing, Spoken Dialogue
Abstract: The design of interfaces for automotive information s
ystems is a critical task. In fact, in the vehicular
domain the user is busy in the primary task of the driving, and any visual distraction inducted by the
telematic systems can bring to serious consequences. Since road safety is paramount, it is needed to define
new interaction metaphors, not affecting the driver’s visual workload, such as auditory interfaces. In this
paper we propose an innovative automotive auditory interaction paradigm, whose main goals are not to
require visual attention, to be smart for expert users, as well as easy to use for inexperienced users. This is
achieved by a new atomic dialogue paradigm, based on a help-on-demand mechanism, to provide a vocal
support to users in trouble. Finally, we present some examples of dialogue based on such approach.
1 INTRODUCTION
In the last years, the in-car telematic systems, called
also Intelligent Transportation Systems (ITS),
achieved spectacular enhancements in their features.
In fact, while the former systems were mainly
focused on providing some route calculations, at the
present more advanced commercial systems, like
Fiat Connect+ or BMW iDrive are becoming real in-
vehicle computers, able to manage hundreds of
features, such as the settings for the climate or the
entertainment sections, the e-mail client, the GSM
phone cell, the web browser, and so on.
Unfortunately, such growth in the number of
of
fered services and information increased the
workload inducted on the driver’s visual channel,
with negative consequences for the safety. This
problem has a fundamental relevance in the
automotive domain, where the user is normally busy
in the demanding and mission-critical task of the
driving. Thus if the system requires too much visual
attention, it can distract the user from his/her main
activity, with potentially fatal consequences.
As the road safety is the most important aspect
whe
n developing ITSs, it is now becoming clear that
the next-generation of automotive applications will
require large efforts for the definition of multimodal
interfaces, intended both as complements or
alternatives to the visual channel, and able to exploit
the other user’s sensorial channels (Gellatly, 1997).
In particular, auditory interfaces can induct
significant advantages, because the user can look at
the road, and in the meanwhile interact with the
system using the acoustic and/or the tactile channels.
But in spite of such considerable advantages, a wide
adoption of automotive vocal interfaces is currently
limited both by strong industrial constraints on the
in-car hardware, and both by some recognition
problems due to the noisy car environment. Thus,
the main challenge is to define a vocal interaction
paradigm able to fully exploit the limited resource,
that should be more effective than the traditional
manual commands, be quick to use for expert user,
be easy to use for novice users, encompass some
error-recovery strategies, and overall, take in great
care the road safety aspects.
The Fiat research centre “Elasis”, and the
Depa
rtment of Mathematics and Informatics of the
9
Costagliola G., Di Martino S., Ferrucci F., Oliviero G., Montemurro U. and Paliotti A. (2004).
AN INNOVATIVE VOCAL INTERFACE FOR AUTOMOTIVE INFORMATION SYSTEMS.
In Proceedings of the Sixth International Conference on Enterprise Information Systems, pages 9-14
DOI: 10.5220/0002653100090014
Copyright
c
SciTePress

University of Salerno started a collaboration aimed
to define an innovative, user-friendly interface for
the next-generation of ITSs. The major purpose of
this project was to keep in the highest priority the
safety issues (thus minimize as much as possible the
workload induced by the system), and in the
meantime to propose something cost-effective to
industrialize in the next two years.
In this paper we present the vocal interface
resulting from that collaboration. In particular, we
propose an interaction paradigm that is easy for
novice users, as well as effective for experienced
ones, taking particularly into account the
management and the recovery from error situations.
The paper is organized as follows: in section 2
we introduce the main issues of HMI in the
automotive field, in section 3 we describe the current
proposal for vehicular speech interfaces, while in
section 4 we illustrate the proposed approach,
together with some examples of vocal interactions.
Finally, in section 5 we present the conclusions and
future work.
2 AUTOMOTIVE HUMAN
MACHINE INTERACTION
“The nation that develops and integrates an
architecture that provides a seamless interface to the
driver will dominate the automobile industry for
many years to come” (NTSC, 1997). This provision
was stated by the US NSTC in 1997, to underline
how much it is considered strategic and important to
define interfaces for an effective automotive human-
machine interaction. Today, seven years later, no
one seemed able to fulfil such provision. In fact,
while the ITSs are becoming even more some kind
of traditional PC, able to connect to the WWW,
check mail, play MP3 or DVD, the interaction with
those systems is somehow far to be a well-
established issue.
2.1 Interaction with ITSs
When dealing with telematic interfaces the main
problem is that traditional HCI techniques and
approaches, such as (Shneiderman, 1998) cannot be
effectively applied. The main difference is that with
desktop applications, designers can make the
assumption that the user’s attention is mainly
focused on the interaction with the system. On the
contrary, with ubiquitous computing (which
encompasses the automotive scenario), designers
cannot rely on a significant user attention, because
usually in those domains the interaction with an
informative system is only one task among the
several actions achieved at the same time by the
user. In particular, in the automotive domain, the
user performs simultaneously a set of complex tasks.
The main one is the driving, but concurrently (s)he
can also perform a set of secondary tasks, involving
interactions with entertainment systems, climate
controllers, navigation aids, etc… Unfortunately,
performing secondary tasks requires the allocation
of some visual, manual and cognitive resources
(Gellatly, 1997), implying the reduction of the
attention devoted to the driving task, with an overall
decreasing of the safety (Redelemeir, 1997). Thus
the design and evaluation of ITS interfaces requires
understanding not only the driver’s interaction with
the interface but also the effects of this interaction
on driver performance, in order not to decrease the
road safety. In particular, to avoid driver’s cognitive
overloads, the designer of an ITS interface has to
make decisions not only about what information to
show, but also about how, where, and when to show
it. This new HCI approach is called Driver-Centred
(Cellario, 2001). We can summarize these
differences by arguing that while the main goal of a
traditional desktop interfaces is to attract the visual
attention of the user, to accomplish effectively
his/her tasks, the main goal of ITSs interfaces is
NOT to attract the visual attention of the user, to
accomplish effectively his/her tasks. One of the
ways to accomplish this task is to exploit the other
human senses, such as the auditory one.
3 VOCAL INTERFACES
In literature there are dozens and dozens of works
about auditory interaction, like (Cole, 1996) or
(Shriver, 2000). Generalizing, we can say that all
those efforts resulted in two main approaches for the
definition of vocal interfaces: the one based on the
natural language, and the one based on the
command word (Westphal, 1999) (however some
authors can use different terminology for this
classification).
With the former approach, the systems should be
able to “dialogue” with the users by using freely the
natural language. This is a very effective, user-
centered approach, because the system should be
adapted to the man, and not vice versa.
Unfortunately, this solution poses many practical
problems, requiring a very complex Speech
Recognition (SR) engine, that relies on a large
amount of hardware resources and domain
knowledge to effectively manage the possible user
input. On the other hand, the command-word
solution proposes the classical computer-centric
ICEIS 2004 - HUMAN-COMPUTER INTERACTION
10

approach, were the user should learn how to use and
interact with system. In fact, with this solution, in
each state the system can accept only a relatively
small vocabulary of words. If such set of words
becomes larger, they typically must be arranged in a
hierarchical structure, to maintain reduced the
number of accepted word per state. This approach is
much more simple and effective to implement,
leading towards better result in the reconnaissance,
but its main limitation is that the user must
necessarily know the set of accepted words for each
state. Hence, usually this approach requires some
kind of support, which can be either vocal or visual.
With the vocal one, the user listens a variety of
options, like standard telephone-based call-center
systems, while in the visual one the systems shows
on a display the set of valid commands for each
state.
3.1 Vocal Interfaces for ITSs
The definition of vocal interfaces in the automotive
field according the driver-centered approach is a
very interesting and opened research field. In fact,
currently in literature does not exist any relevant
theory or approach for the development of
automotive dialogue-based interaction paradigms,
but we can find a lot of generic guidelines like in
(Rogers, 2000), together with many approaches
about auditory support for the navigation aids, like
in (Geutner, 1998). This because in the auditory
domain, the automotive field introduces a wide set
of new issues. In particular, the car interior is an
acoustically hostile environment, encompassing a lot
of ambient background noises, such as wind, climate
fan, road conditions, speed, passengers, etc…
Moreover the hardware resources should be limited,
due to economical and industrial constraints, and the
SR engine should be speaker independent, because
either it is not supposable that the car’s buyer spend
a lot of time in training the system, and the vehicle
can be used by a large variety of different drivers.
All these aspects lead towards a significant
reduction of the system ability to recognize vocal
commands. This means that for short-term ITSs, the
developers have to discard the natural language
approach, and to adopt the command word-like one,
in order to obtain an effective rate of vocal
interaction. But, as stated before, the command-word
approach poses a series of problems for novice
users. To this aim, the developers of ITSs vocal
interfaces have to define an effective dialogue
paradigm, able both to fit the imposed the industrial
constraints, and to offer a satisfactory support for the
users.
4 THE PROPOSAL
The aim of the collaboration between the research
centre “Elasis” and the University of Salerno was to
define a vocal interface, intended to manage the
main secondary tasks for next-generation ITSs.
The main requirements for the system were:
• Easy to use for naïve user, by encompassing
some kind of support
• Quick to use for expert users
• Easy and cost-effective to industrialize
Moreover, the system had to be implemented by
using the ScanSoft Automotive ASR-1600 SR
engine, with the limitation that the number of words
should be about 30 for each state.
Thus, to define an innovative vocal interface, we
had to specify (I) the system prompts, (II) the
hierarchy of the command-words, (III) the error-
recovery strategies, and (IV) the resulting interaction
paradigm.
4.1 The hierarchy of commands
When dealing with the command-word approach,
one of the main challenges is to deal with a limited
vocabulary of accepted words, due to hardware
constraints. Hence, we needed to define a
meaningful hierarchy of the features we wanted to
make accessible via vocal interaction. We grouped
the words according to the modules of the ITS,
leading to a multi-rooted tree, where the roots
correspond to the modules of the ITS (i.e. the
Navigator, the Tuner, the CD, the Phone and the
Services), and the leafs represent the executable
commands. To complete the hierarchy, we needed to
introduce some items for navigating this tree from
the roots to the leafs. We call Non-Terminals the
commands representing the internal nodes of the
hierarchy, and Terminals the command representing
the leafs of the hierarchy. Obviously, the uttering of
a terminal word leads to the execution of some
action in the ITS, while a non-terminal word should
be followed either by a terminal or non-terminal one.
Moreover, for an effective vocal interaction, the
user should be provided with some features to move
within the hierarchy, and to control the vocal
interaction. To this aim we defined the following set
of words, that can be used in every state of the
system: the user can say “Cancel” to abort the voice
recognition task, “Undo” to cancel the last accepted
word (thus coming back of one level in the
hierarchy), “Repeat” to make the system to say the
last understood word, or “Help” to get the list of the
words accepted in the current state.
Another fundamental aspect in the definition of
the vocal paradigm is the relation between the
AN INNOVATIVE VOCAL INTERFACE FOR AUTOMOTIVE INFORMATION SYSTEMS
11

information shown by the GUI and the information
accepted by the SR engine. Indeed, with current
commercial ITSs, very often the vocal interfaces
seems to be badly integrated with the underlying
graphic interface. The result is that usually the vocal
commands are not related at all with the information
shown in the GUI. Our approach, instead, was to
make the GUI and the SR to share the same context,
i.e. changing of states operates via GUI reflects on
the SR state and vice versa. This allows the users to
mix visual/tactile and auditory inputs, making the
interaction smarter and easier to learn.
4.2 The auditory prompts
In vocal interaction, the auditory prompts are, in
some way, the basis of the “interface”, because they
drive the user through all the dialogue to achieve the
intended task. Hence, it is fundamental that the
prompts fit in with the ongoing dialogue (Krahmer,
1997), and that never be ambiguous, making the user
always aware of the state of the vocal interaction.
When dealing with vocal interfaces, designers
can exploit two main kinds of prompts: the
“earcons” (Brewster, 1989) and the machine-driven
dialog. In the former case, the system plays a tone to
report an event of the interaction (such as the
acceptance of a command or the completion of a
task), while in the latter the system “says” one or
more word, to the same aim. Each of the two
approaches has its main advantages and
disadvantages. The machine-driven one is very
useful to guide novice users to their goals, because
in each state the system lists the set of valid
commands, but interactions result slowed by this
forced iteration of options, most of which are
presumably irrelevant to the user’s goals. Instead,
the earcons-based one leads towards a very quick
interaction, but it can result hostile for novice users,
who do not receive any kind of support.
In our proposal we mixed the two approaches:
the interaction is mainly based on the earcons, and in
particular any system output always terminates with
and earcon, but, if the user appears to be in
difficulty, the system starts to provide some kind of
vocal support to the user. About the adopted
earcons, we used a single earcon to represent the
state when the system is able to manage a new input
from the user, and a double earcon to highlight the
successful end of a vocal interaction. This approach
will be detailed in section 4.4.
4.3 The error-recovery strategies
In the automotive field, the SR engine very often has
to deal with errors in the speech recognition. About
the cause of these errors, we noticed that, during a
vocal interaction with the system, two kind of fault
situations can arise:
• The user does not utter any word.
• The word uttered by the user does not match any
valid command.
In both cases, the system has to initiate some
error-recovery strategy, but, in our opinion, these
two situations imply two different kinds of
problems. In the first case, most likely the user does
not know what the accepted commands are for the
specific state of the hierarchy, and thus an
immediate support is required. The second situation,
on the other hand, can be generated either from a
wrong uttered word or from a system error in the
recognition. These two fault situations requires
different recovery strategies, but surprisingly, most
of the current commercial systems manage the two
conditions in the same way. Moreover, about the
second situation, we were interested in
understanding how much of the unmatched errors
are caused by a user’s error and how much by the
system. To this aim, we conducted some evaluations
on medium-high class cars on the market equipped
with some of the most advanced commercial ITS.
We found an average recognition rate of the 95%
when dealing with the commands, and of almost the
92% when inputting numbers in the cell-phone
dialing task. Notice that, even if those results seem a
very good achievement, they mean that, when
vocally composing a phone-number, there is a
misunderstood cipher every eleven uttered! This
quick survey lead us to an important consideration:
if a recognition error occurs, it is very likely the
system missed to recognise the word rather than the
user uttered an invalid word. This consideration has
some deep implications in the definition of error-
recovery strategies. The most obvious is that if an
error does occur, we do not have to “condemn” the
user, with something like “What you say is illegal”,
but instead we should let the system take the
responsibility of the error and focus on recovering.
Moreover, in presence of a recognition error caused
by the system, if it starts to list all the acceptable
words, the only result is to annoy and irritate the
user. Finally, it is widely recognized that one of the
worst (and most irritating) approaches in presence of
an error is to systematically request a repetition of
the command to the user (Gellatly, 1997). This
because, in presence of a recognition error, users act
like as they would do when dealing with a human
dialogue partner: they start speaking slowly, varying
volume, pitch and rate of the pronunciation, as well
as syllabicating the words. All these actions work
well with human counterparts, but unfortunately
they deteriorate very much the results of the SR
engine.
ICEIS 2004 - HUMAN-COMPUTER INTERACTION
12
Starting from these bases, we defined two
different strategies for the error, having the main
goal to keep the vocal interaction quick and
effective. The main idea was to provide a contextual
help-on-demand mechanism. This means that for
each state the user can ask for some support, but the
system does not provide any kind of vocal help until
it is explicitly required by the user. However,
because the user must be aware of the availability of
a help, if the system detects a possible indecision in
the user vocal interaction, it “suggests” to him/her
the existence of the vocal support. The main issue
for defining an effective auditory error-recovery
strategy was thus to support the user only when (s)he
really need for assistance, because too much (non
demanded) help will unacceptably slow down the
interaction, making the user discarding the vocal
interface, with all the related security consequences.
On the other hand, too little help will leave the user
unable to continue the interaction, again making
him/her not using the vocal system. Thus, our main
problem was to understand when the user is in
trouble and needs for assistance. The approach we
chose is to select the strategy to adopt based on the
happened error:
• If the system does not understand the uttered
word, we made the assumption that likely the
system is in wrong and thus it should not start
with providing any support, but just asks to the
user to repeat the word. Then, only if there is a
second mismatch, this probably means the user
is in wrong. In this situation, the system
proposes to the user to say “help” to get the
contextual assistance, i.e. a list of all the
commands accepted in that particular state.
• If the user does not utter any word after the
prompt, very likely it means (s)he does not
know what to say, and then (s)he immediately
requires some kind of support. Again, in this
case the system proposes the user to say “help”
to get the contextual assistance.
With this approach, we are able to discriminate
when the user really has to be supported, thus
making the whole vocal interaction more agile and
effective.
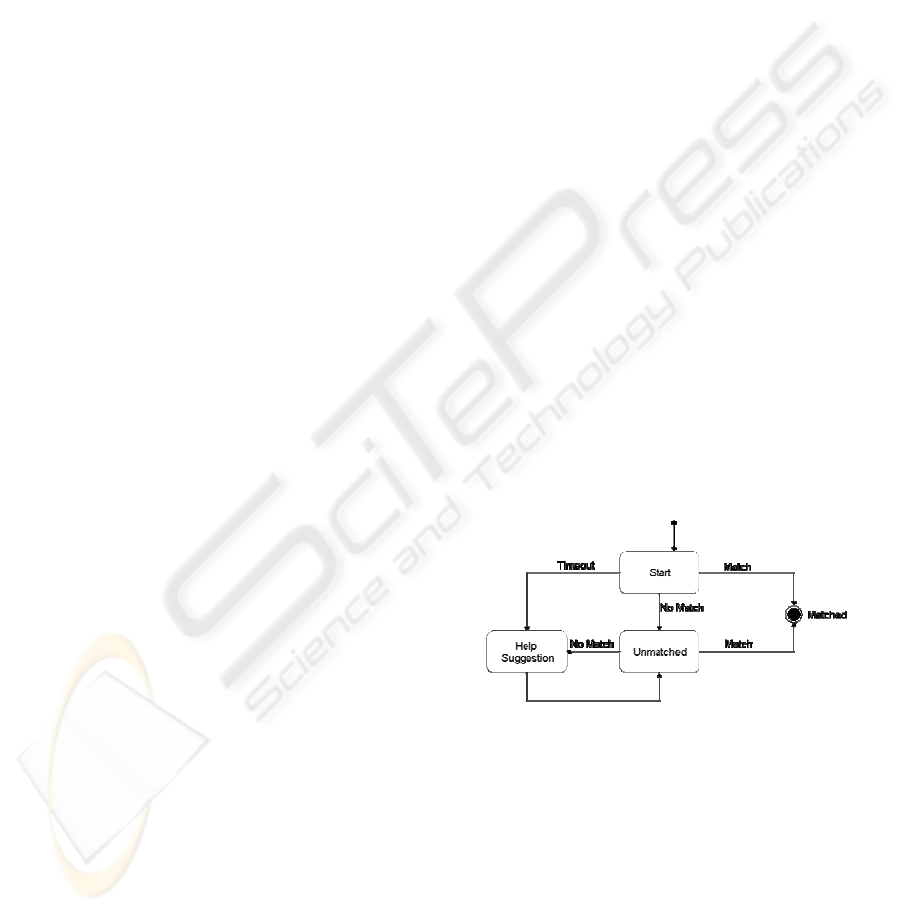
4.4 The proposed paradigm
The resulting vocal interaction paradigm is derived
by all the concepts exposed above. and is depicted in
Figure 1, by using the statechart formalism. To start
a vocal interaction with the ITS, the driver should
press a button located on the steering wheel, and
named Voice Recognizer (VR). As a result, the
system activates the on-board microphone and the
SR engine, and plays a “ready earcon”, meaning that
it is ready to manage a vocal input. In every state of
the vocal dialogue, then, three conditions may occur:
1) The user utters a word that is matched by the
system. In this case, the system goes in the
“Matched” State. If the word is a terminal
command, then the system executes it,
otherwise, the system moves in the hierarchy,
goes back to the “Start” state, and plays again a
“ready-earcon”, meaning that the word was
matched and the user can utter the next word.
2) The user utters a word that is not matched by
the system. In this case, the system goes to the
state “Unmatched”. At the same time it prompts
the problem to the user by saying “Sorry?” and
playing the “ready-earcon”. Notice that in this
situation no explicit vocal help is provided. Now
again the three conditions can happen:
• If the new inputted word matches a valid
command, than the system goes to the
“Matched” state, proceeding as condition 1.
• If the new inputted word does not match a
valid command, this very likely means that
the user is in wrong. Thus the system says
“Unable to match. If you need assistance
please say help, otherwise input a choice”,
goes back to the “Unmatched” state and
plays the ready earcon.
• If the user utters nothing the system aborts
the SR task.
3) The user does not utter any word for more than
5 seconds after the ready earcon. In this case, the
system goes says “If you need assistance please
say help, otherwise input a choice”, and then
acts as in the previous situation.
Figure 1: The proposed vocal interaction paradigm
4.5 Some examples of dialogue
In the following we provide some examples of
auditory interaction, to exemplify the vocal
paradigm proposed above.
In the first example, let us suppose the user
wants to listen to the track number 3 of the CD when
the navigator module is activated:
User: (click on the VR button)
System: (ready-earcon)
User: “CD”
AN INNOVATIVE VOCAL INTERFACE FOR AUTOMOTIVE INFORMATION SYSTEMS
13

System: (ready earcon)
User: “Track”
System: (ready earcon)
User: “Three”
System: (ok earcon and play track 3)
Because the vocal engine is aware of the active
module, to achieve the previous task when the CD
module is active yet, the user can avoid to say “CD”,
to speed-up the interaction.
In the next example it will be shown how the
system manages a double recognition error. Let us
suppose again the user wants to see the entire path
calculated by the navigator on the display.
User: (click on the VR button)
System: (ready-earcon)
User: “Navigator”
System: (ready earcon)
User: “Visualize”
System: (mismatch) “Sorry?”
User: “Visualize”
System: (mismatch) “Unable to match. If you need
assistance please say help, otherwise input a choice”
(ready-earcon)
User: “Show”
System: (ready earcon)
User: “Path”
System: (ok earcon and show the path)
Finally in the following example we show how
the system manages a timeout error. Let us suppose
the user wants to redial the last number on the cell.
User: (click on the VR button)
System: (ready-earcon)
User: “Phone”
System: (ready earcon)
User: (silence for more than 5 seconds)
System: “If you need assistance, please say help,
otherwise input a choice” (ready-earcon)
User: “Help”
System: “You can say: Dial, Call contact, or Redial.
Please input a choice”. (ready-earcon)
User: “Redial”
System: (ok earcon and redial last number)
5 CONCLUSIONS
Safety on the roads is one of the main goals for
everyone involved in the automotive field. The
advent of in-car ITS systems based on a visual
interaction can distract the user from the main task
of driving the car, with potentially fatal effects. On
the other hand, the availability of even more
complex telematics requires even more complex and
advanced interaction mechanisms.
In this paper we presented a work developed
jointly by the research centre “Elasis” and the
University of Salerno, aimed at defining a novel
approach for the automotive vocal interfaces. The
proposal, based on the command word paradigm to
match the hardware constraints, encompasses a new
atomic dialogue paradigm, based on earcons and a
help-on-demand mechanism, to provide a vocal
support to users in trouble. The result is a smart
auditory interface for expert users, but also user-
friendly. Finally, it is important to underline that by
using this paradigm, the user can interact with the
telematic system by using exclusively the auditory
and the tactile channels, thus without distracting the
visual attention from the road.
REFERENCES
Brewster S, Wright P. and Edwards A., An evaluation of
earcons for use in auditory human-computer
interfaces. Proceedings of InterCHI'93, Amsterdam,
1993
Cellario M., Human-Centered Intelligent Vehicles:
Toward Multimodal Interface Integration. IEEE
Intelligent systems. 2001
Cole R. et al., Survey of the state of the art in human
language technology. Cambridge University Press,
1996.
Gellatly A., The use of speech recognition technology in
automotive applications. PhD thesis, Virginia
Polytechnic Institute and State University, 1997.
Geutner et Al., Conversational Speech systems for on-
board car navigation and assistance. ICSLP ’98,
Adelaide, Australia, 1998
Krahmer E., Landsbergen J., Pouteau X.. How to Obey the
7 Commandments for Spoken Dialogue Systems.
Proc. (E)ACL workshop on Interactive Spoken Dialog
Systems, J. Hischberg, C. Kamm & M. Walker,
Madrid, 1997
NTSC HCTS Team, The Human Centered Transportation
System of the Future. Proc. ITS America 7th Ann.
Meeting, Washington D.C., 1997.
Redelemeir D.A., Associations between Cellular-
Telephone Calls and Motor Vehicle Collisions. The
New England Journal of Medicine, Vol. 336, February
1997.
Rogers S. et Al., Adaptive User Interfaces for Automotive
Environments, Proc. IEEE Intelligent Vehicles
Symposium, 2000.
Shneiderman B, Designing the User Interfaces, Addison
Wesley, 1998
Shriver S., Rosenfeld R., Keyword Selection, and the
Universal Speech Interface Project. Proc. AVIOS
2002, San Jose, California, 2002
Westphal, M., Waibel,A., Towards Spontaneous Speech
Recognition For On-Board Car Navigation And
Information Systems. Proc. of the Eurospeech 99,
1999.
ICEIS 2004 - HUMAN-COMPUTER INTERACTION
14
