
INTELLIGENT VIRTUAL ENVIRONMENTS FOR TRAINING IN
NUCLEAR POWER PLANTS
Gonzalo M
´
endez, Pilar Herrero, Ang
´
elica de Antonio
Computer Science School, Technical University of Madrid
Campus de Montegancedo s/n, 28660 Boadilla del Monte (Madrid), Spain
Keywords:
Intelligent Tutoring System, Pedagogical Agent, Virtual Environment, Training, Software Architecture, Nu-
clear Power Plant.
Abstract:
Educational Virtual Environments are gaining popularity as tools to enhance student learning. These environ-
ments are often used to allow students to experience situations that would be difficult, costly, or impossible in
the physical world. At the Technical University of Madrid we have developed several applications to explore
the use of intelligent tutors in VR. In this paper we present two of these applications which have been used for
training in radiological protection in Nuclear Power Plants (NPP). These applications are inhabited by avatars
and/or agents which are continuously monitoring the state of the environment and manipulating it periodically
through virtual motor actions. Our applications help students learn to perform physical, procedural tasks in
some different risky areas of NPP.
1 INTRODUCTION
Virtual Reality (VR) and Virtual Environments (VE)
can provide us with simulation-based learning envi-
ronments, offering exciting opportunities and chal-
lenges for educational software and for intelligent tu-
tors. As in any simulation-based learning environ-
ment, students may reach impasses or fail to recog-
nize learning opportunities, so they can benefit from a
computer tutor that can provide answers to their ques-
tions and offer advice. Currently, there are mainly
two kinds of intelligent tutors that are being used to-
gether with VEs: Intelligent Tutoring Systems (ITS)
(Sleeman and Brown, 1982) and pedagogical agents
(Johnson et al., 2000), some of which are discussed
in section 5.
VEs offer a broader flexibility for human-computer
interaction than earlier technologies did. First, the
computer tutor can inhabit the virtual world along
with students, which allows a wider variety of interac-
tions between students and tutors. Second, VR allows
the tutor to track students’ visual attention and phys-
ical movements (e.g., the position and orientation of
their hands). Thus, VR opens up new possibilities for
teaching physical tasks.
VEs are especially valuable in domains where real-
life training is very expensive or where students can
experience some risky situations, such as mainte-
nance or control of Nuclear Power Plants (NPP) (Pan-
telidis, 1996). In addition, VR can support more be-
lievable stimuli and reactions than earlier technolo-
gies, thereby providing an adequate simulation for a
wider range of situations.
To explore the use of intelligent tutors in VR, we
have developed two applications for training in NPPs:
PRVIR (Virtual Reality Technology applied to Train-
ing in Radiological Protection) (Mendez et al., 2001)
and MAEVIF (Model for the Application of Intelli-
gent Virtual Environments to Education and Train-
ing) (de Antonio et al., 2003). Our applications help
students learn to perform physical, procedural tasks,
such as the procedure for admission in a NPP or the
entrance in a radiologically controlled area.
The PRVIR application was developed for training
operators of Nuclear Power Plants (NPP) in radiolog-
ical protection.
PRVIR is divided into two sections. The first one
teaches the operators the concepts related to radiology
and radiological protection: what radiation is, types
of radiation, procedures, etc. It is designed as a mul-
timedia course, where the student has to learn some
concepts and pass an exam before he can advance in
the course.
In the second section, the student is shown how he
204
Méndez G., Herrero P. and de Antonio A. (2004).
INTELLIGENT VIRTUAL ENVIRONMENTS FOR TRAINING IN NUCLEAR POWER PLANTS.
In Proceedings of the Sixth International Conference on Enterprise Information Systems, pages 204-209
DOI: 10.5220/0002642002040209
Copyright
c
SciTePress

must act inside the plant, and then he has to perform
inside a VE the procedures he has seen (see Figure 1).
Figure 1: A sample VE.
The ITS monitors the student’s actions inside the
VE, giving hints when these actions are not correct.
This paper begins describing the ITS we have used
in the PRVIR application (section 2) and the archi-
tecture for its integration with the VE (section 3); it
then presents our current and future work (section 4)
and it analyses some related work in the area (section
5); finally, it details some of the conclusions we have
obtained (section 6).
2 STRUCTURE OF THE ITS
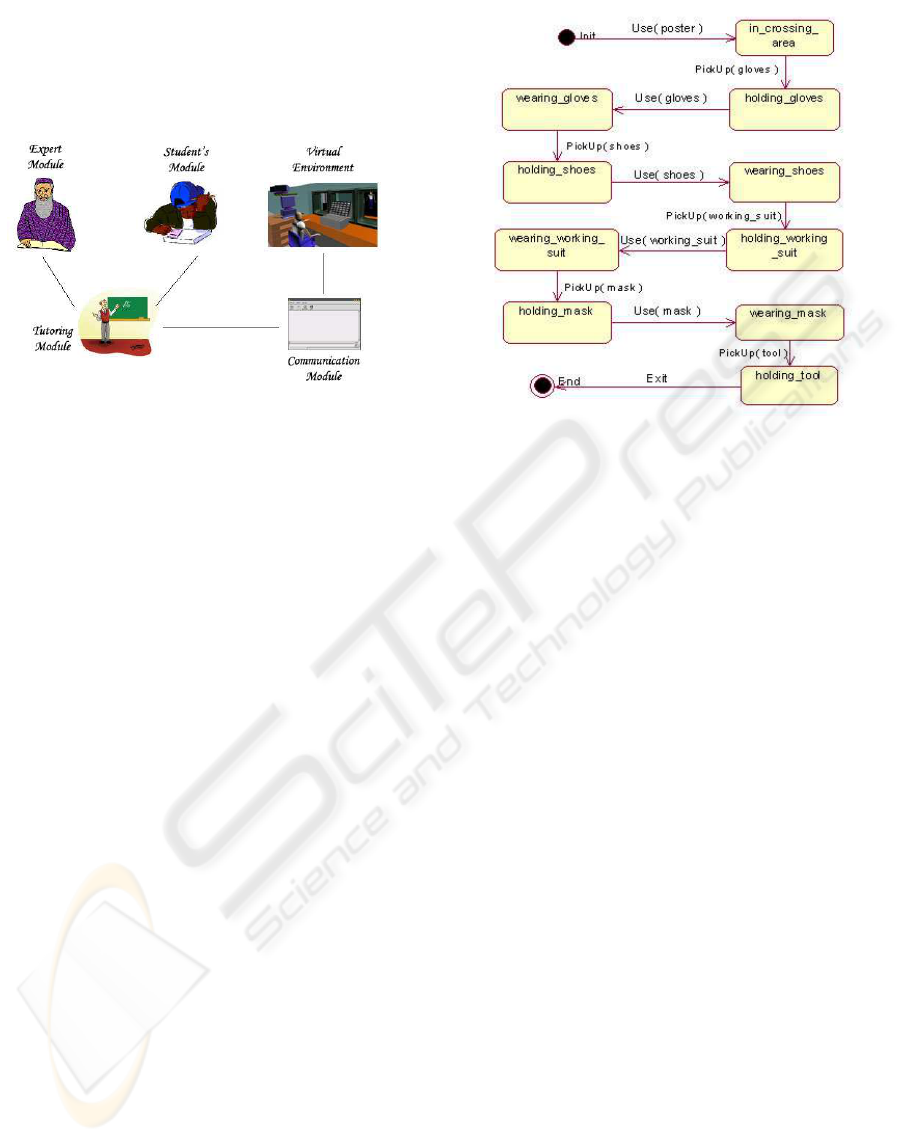
The ITS we have developed consists of four mod-
ules, each of which provides a very precise func-
tionality: tutoring module, expert module, student’s
module and communication module, as originally de-
scribed in (Wenger, 1987).
The Expert Module contains the knowledge about
the subject to be taught to the student, and it is the
base for the analysis of the answers provided by the
student to the tutor’s questions. This knowledge is
divided into informative concepts, which are small
pieces of information, and the knowledge necessary
to solve the exercises. The expert module must be
designed in a way that information is easily accessi-
ble and modifiable. The way we have overcome this
problem is saving all the information in a relational
database. Each informative concept points to other
concepts that must be shown necessarily before or af-
ter it, as they are all part of a particular block of con-
cepts. Each block, in turn, points to other blocks that
must be shown necessarily before or after it within a
given module.
The Tutoring Module contains the pedagogic
knowledge, and is in charge of selecting the appro-
priate concepts to be shown in the course. It also has
the strategies, rules and processes needed to drive the
interactions between the student and the system, in or-
der to make decisions about the concepts to teach and
the exercises to be done by the student, along with
the moment when he must be interrupted in order to
correct him or make a suggestion. In addition, it de-
cides when it is appropriate to end showing informa-
tive concepts and start with an evaluation. At the end
of each block of concepts, there is a bunch of exer-
cises related to the concepts explained in that block,
so the student can test his recently acquired knowl-
edge. There is also an evaluation at the end of each
module, where exercises from all the blocks that form
that module will be chosen.
The Student’s Module keeps individualized infor-
mation about every student taking the course. It is re-
sponsible for tracing what informative concepts have
already been taught to the student, how many exer-
cises he has done and the degree of success and time
he has used to complete them. To measure the stu-
dent’s progress, we need some metrics with which to
compare what are the minimum and average levels for
a student to pass to the next level.
The Communication Module is in charge of the
communication between the student who is taking the
course and the ITS. This module must inform the tu-
toring module about the actions that are performed by
the student all along the course. These actions may
be the visualization of an informative concept, the an-
swering to an exercise in any of the forms that it may
adopt, or any of the actions performed inside the VE.
The communication module must make use of all the
available multimedia resources in order to make the
course as easy-going as possible, but ensuring it does
not make the course be too slow, which in the end
could bore the student.
Each of the described modules has a very important
role to play in the correct operation of the ITS.
3 ARCHITECTURE
The architecture is the key issue in the correct func-
tioning of the system we have just described. While
doing so, we have provided some clues on how this
integration may be done. Now, we will explain in de-
tail how this has been done in our system.
From the former section we can infer the following
information:
• The communication module must inform the ITS
about the actions of the student.
• From the point of view of the tutoring module,
there are two different types of exercises. One of
them includes the situations simulated in the VE,
and the other one encompasses all the different ex-
ercises related to the basic concepts.
INTELLIGENT VIRTUAL ENVIRONMENTS FOR TRAINING IN NUCLEAR POWER PLANTS
205
This means that we can consider the VE as a par-
ticular kind of exercise and that the actions performed
in it must be supervised by the tutoring module.
Thus, the structure of the integrated application is one
shown in Figure 2.
Figure 2: Architecture of the integration.
Once the general structure of the application has
been decided, it is necessary to design the way the
tutoring module is going to be able to supervise the
actions that take place inside the VE.
The steps to be followed inside the NPP are very
well defined, and an action cannot be carried out if the
ones that go before that one haven’t been performed
already. Thus, the representation of a procedure using
state diagrams, where the actions that make the state
change are the actions that the student can do inside
the VE, seems to fit perfectly our needs (see Figure
3). In some situations, there may be different pos-
sibilities in which several actions can be performed
in a not predefined order. In this case, the state dia-
gram may have some branches, but they will eventu-
ally converge in a state from where the process will
continue.
When these diagrams are designed, the most flexi-
ble way to implement the tutoring module is to build
a general mechanism that is able to read the structure
of any state diagram as well as the actions that must
be done to change from one state to another. The state
diagram, as we have already done with the rest of the
expert module, is stored in a relational database.
The last problem to be solved has to do with the
communication between the VE, the communication
module and the tutoring module. An action inside the
VE might not be possible due to the following two
reasons:
• The selected action may not be the right action to be
performed at that moment, either because it is not
to be done at that point in the sequence of actions
or because it is not part of the procedure. This de-
cision must be taken in terms of the expert knowl-
edge.
• It may not be possible to physically do the action,
Figure 3: A sample scene.
usually because the object is too far to be able to in-
teract with it. This has to do with restrictions inside
the VE, and not with the ITS.
Because of these two sources of problems, when
the student tries to do something inside the VE, the
procedure to be followed is:
1. The communication module asks the VE if it is
physically possible to do that action.
2. If it is possible, then it asks the tutoring module if
it is the right action to be done in that moment.
3. The tutoring module asks the expert module if it is
the right action to be done in that moment.
4. If it is the right action, then the tutoring module
tells the VE to perform the action.
5. If it is not possible to do the action or if it is not
the right action, then the communication module
shows a message to the student. This message is
sent by the tutoring module in case the action is
wrong, or by the VE if it is not physically possible
to do that action.
4 CURRENT AND FUTURE
WORK
PRVIR, although successful, has some serious restric-
tions imposed by our clients at the NPP, and they
mainly have to do with the tutor not letting the stu-
dent deviate from the predefined procedures, so that
he can explore other possibilities, or with the adapta-
tion of the tutor to the student’s needs.
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
206

Thus, the tutor in this application is not very intel-
ligent or skilled, and, as an additional drawback, it
is not embodied, so it cannot demonstrate the student
how to perform the procedure he is studying.
Even so, the PRVIR system is already in use at the
Vandellos II NPP in Spain. Despite the limitations
we have mentioned, this has been the first step to use
VR in a Spanish NPP to train operators in different
tasks, so depending on how successful it is, we will
be adding more capabilities to the intelligent tutor, so
that in a close future these system can effectively be
used instead of the training inside the NPP.
Several experiments have shown that the learning
experience is much more effective if there is an em-
bodied tutor inside the VE helping the student in the
training process (Lester et al., 1997a). Because of
this reason, we are currently developing a new sys-
tem, MAEVIF, where we are substituting PRVIR’s
ITS with a multiagent system that will have analogous
functions, but that will support an embodied tutor and
will also be easier to expand and modify.
MAEVIF (Model for the Application of Intelligent
Virtual Environments to Education and Training) is
a project funded by the Spanish Ministry of Science
and Technology. The objective of the project is the
definition of a model for the application of intelligent
virtual environments in education and training. This
implies:
• The definition of a generic model for intelligent
learning environments based on the use of virtual
reality.
• The definition of an open and flexible software ar-
chitecture to support the generic model of a learn-
ing environment.
• The design and implementation of a prototype au-
thoring tool that simplifies the development of
learning environments based on the generic model.
• The definition of a set of methodological recom-
mendations for the development of virtual learning
environments. This methodology will propose a set
of steps for the design of the environment accord-
ing to the generic model, and its implementation
with the help of the authoring tool.
The most relevant aspects that are being taken into
consideration in the definition of the generic model
are:
• The design of a tutoring strategy, easily adaptable
and configurable, that allows for an intelligent su-
pervision as well as for the dynamic adaptation of
the system to the special needs of each student.
• The design of a cognitive diagnosis method which
is able to perform non-monotonic reasoning about
the knowledge of the student and their individual
characteristics.
• The definition of a knowledge representation for-
malism for the expert knowledge which is specif-
ically crafted for the use within virtual environ-
ments, and which is independent of the language
used for its development.
Each component of the architecture of the intelli-
gent tutor is an agent with a very specific function,
the most relevant of which are:
• Planning agent: it uses a strips-based algorithm
to plan and replan what the students have to do.
This makes it possible to dynamically generate ex-
ercises, so that students can practice different pro-
cedures starting from different situations.
• Tutor agent: according to the planning agent’s plan,
this agent is in charge of explaining the student
what he has to do, giving hints, supervising him
or showing the appropriate actions.
• Plath-planning agent: this agent is in charge of cal-
culating the appropriate routes to go from one place
to another inside the VE using the RTA* algorithm.
It also controls the student’s movement to see if he
is following the right path. If not, it gives hints to
the student so that he can follow the right route.
• World agent: its mission is to keep a snapshot of the
state of the world, so that he has all the information
about the world that other agents may need. This
information includes the position of all the objects
and avatars, the state of different devices or the ob-
jects that each student is carrying.
The communication among agents is carried out
using a blackboard. Every time an agent needs some-
thing, it publishes it on the blackboard. The rest of
the agents will see if they have something useful, and
will write it on the blackboard, too. The original agent
will then see all the options and choose the one that
best suits its needs.
This mechanism has been used, for example, by the
planning agent. This agent publishes the state of the
plan, and asks the rest of the agents if they can con-
tribute something to the plan. With all the answers,
the planning agent explores the different alternatives
until the plan is finished.
MAEVIF supports several students being trained
at the same time using different computers connected
though a network.
The agents are being developed using JADE, and
the VE has been developed using OpenGL. The con-
nection between both of them is based on CORBA,
so, as an additional feature, they can run in different
machines to improve the system’s performance. Fi-
nally, the connection between different clients is done
using DirectPlay, so the visual state of the VE is con-
sistent in all the clients.
INTELLIGENT VIRTUAL ENVIRONMENTS FOR TRAINING IN NUCLEAR POWER PLANTS
207

5 RELATED WORK
There are several projects aiming at the use of VR for
education and training.
In all probability, the most famous embodied peda-
gogical agent nowadays is Steve(Soar Training Expert
for Virtual Environments). Steve is an autonomous,
animated agent for training in 3D virtual environ-
ments (Rickel and Johnson, 1999) that has been de-
veloped at USC. Steve’s role is to help students learn
procedural tasks, and he has many pedagogical ca-
pabilities one would expect of an intelligent tutoring
system: Steve can demonstrate procedures, it can
monitor students as they practice a task, giving them
feedback on their actions, and it can answer simple
questions.
Steve was designed to be easy to use in new do-
mains and virtual worlds. It was originally applied
to equipment operation and maintenance training on
board a virtual ship. Subsequently, it was significantly
extended and applied to leadership training in virtual
Bosnia (Rickel et al., 2002).
However, the leadership training application was
designed with Steve in mind. We have recently car-
ried out an experiment to integrate Steve in an al-
ready existing VE (Mendez et al., 2003), and although
it worked quite well, some issues did arise that re-
quire further consideration in the design of this kind
of agent.
Adele (Agent for Distance Education - Light Edi-
tion) (Shaw et al., 1999) has also been developed at
USC. The functionality of Adele is quite similar to
that of Steve, but it has been extended to support some
additional persona features and instructional capabil-
ities that Steve lacks. In addition, whereas Steve has
been thought to be used for training, Adele has been
mainly designed to be used in education.
Adele has been used in a case-based clinical diag-
nosis application, and she can highlight interesting as-
pects of the case, monitor and give feedback as the
student works through a case, provide hints or ra-
tionales for particular actions, or quiz the student to
make sure he understands the principles behind the
case.
Cosmo is a life-like animated agent developed at
NCSU IntelliMedia Initiative (Lester et al., 1997b).
Given a request for an explanation or a hint, Cosmo’s
behavior planner selects the explanation, which is
mainly determined by the current problem state.
Then, the explanation planner consults the knowledge
sources to select a sequence of communicative acts.
To ease the student’s acquisition of problem-solving
skills, the explanation planner supplies him with rel-
evant causality knowledge when the student requests
advice, as well as justifications for its suggestions.
A lot of effort has been spent to endow this agent
with diectic believability, which allows him to move
through the environment, point to objects and refer
to them appropriately. For that, a diectic behavior
planner is used to coordinate locomotive, gestural and
speech behaviors.
Herman the Bug is another life-like pedagogi-
cal agent developed at NCSU IntelliMedia Initia-
tive (Lester et al., 1999) that has been used in the
DESIGN-A-PLANT learning environment. The ob-
jective is for students to learn concepts about botani-
cal anatomy and physiology.
Herman is an insect that dives into plant structures
and provides problem-solving advice to students. As
students build plants, Herman observes their actions
and provides explanations and hints.
This learning environment was built in order to
study mixed-initiative problem-solving interactions in
constructivist learning environments. Herman cannot
participate in complex dialogues requiring turntaking,
back channeling, or even rudimentary discourse seg-
mentation. The authors have been able to identify
what they have called the persona effect (Lester et al.,
1997a), meaning that the presence of a lifelike charac-
ter in an interactive learning environment - even one
that is not expressive - can have a strong positive ef-
fect on student’s perception of their learning experi-
ence.
Vincent is a synthetic pedagogical agent that helps
the trainees in the web based learning process (Paiva
and Machado, 2002). This agent combines a set
of sensors and actors that establish message-based
communication with the micro-learning environments
while gathering information about trainee perfor-
mance. It has an anthropomorphic representation fea-
turing four emotional attitudes: sad, happy, disap-
pointed, and impatient.
Vincent can perceive the environment and act on
it, having the capability of making inferences about
those perceptions, solving problems and determining
what actions should be performed to reach his goals.
He can do this through his cognitive behavior, which
implies deciding what pedagogical actions must be
taken for a particular situation, and his physical be-
havior, which includes Vincent’s visual and audio at-
titudes.
The use of pedagogical agents seems to be more
extended than ITSs, due to the benefits obtained from
their embodiment inside VEs, and this tendency will
increase when these agents are commonly endowed
with human attributes such as perception, personality
traits, natural language recognition and generation or
ergonomical restrictions, since training will be much
more realistic.
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
208

6 CONCLUSIONS
Although secure, Nuclear Power Plants are a very
special environment where all precautions and help
are always welcome. As we learned during the de-
velopment of the PRVIR project, there are certain ar-
eas where human presence is not advisable. However,
from time to time it is necessary to inspect their state,
and in these cases, the better the action is planned and
trained, the less dangerous it is for the person who has
to perform it.
For these reasons, NPPs will be really benefited
from the advance in the development of VEs as a sub-
stitute for physical mockups of the plant, since they
constitute a more economical solution for planning
and training than former ways do.
Our first experience adding intelligent tutoring in
the PRVIR project has been quite satisfactory, and al-
though the system had some limitations, it provided
us and the Vandellos NPP with a very valuable expe-
rience to carry on with this work.
As a result of this experience and our previous work
with ITSs and agents, we expect the MAEVIF system
to be a much more sophisticated substitute for VEs
for training with intelligent tutoring, in which it will
be possible to substitute any of its components with
a different one in order to better adapt the system to
the particularities of each domain and user, as well
as to take advantage of new advances in science and
technology.
For this to be possible, it would be desirable that
all the researchers and developers of this kind of sys-
tems worked towards the elaboration of standards that
allowed the construction of interchangeable compo-
nents. These standards will be quite beneficial for
the development of VEs for training, due to the wide
range of disciplines involved in the development of
these systems and the difficulty to have experts in all
of them in the development teams.
Unfortunately, as far as we can see, these standards
are still far from being available.
ACKNOWLEDGEMENTS
PRVIR was funded by the Electrical Group for the
Nuclear Technological Development (DTN). MAE-
VIF is funded by the Spanish Ministry of Science and
Technology under contract TIC2000-1346.
REFERENCES
de Antonio, A., Imbert, R., Ramirez, J., and Mendez, G.
(2003). An agent-based architecture for the develop-
ment of intelligent virtual training environments. In
Proceedings of m-ICTE 2003.
Johnson, W. L., Rickel, J. W., and Lester, J. C. (2000). Ani-
mated pedagogical agents: Face-to-face interaction in
interactive learning environments. International Jour-
nal of Artificial Intelligence in Education, 11:47–78.
Lester, J., Convers, S., Kahler, S., Barlow, T., Stone, B., and
Bhogal, R. (1997a). The persona effect: Affective im-
pact of animated pedagogical agents. In Proceedings
of CHI 97, pages 359–366. ACM.
Lester, J., Voerman, J., Towns, S., and Callaway, C.
(1997b). Cosmo: A life-like animated pedagogical
agent with deictic believability. In IJCAI97 Workshop
on Animated Interface Agents: Making them Intelli-
gent, Nagoya, Japan.
Lester, J. C., Stone, B. A., and Stelling, G. D. (1999). Life-
like pedagogical agents for mixed-initiative problem
solving in constructivist learning environments. User
Modeling and User-Adapted Interaction, 9(1-2):1–44.
Mendez, G., de Antonio, A., and Herrero, P. (2001). Prvir:
An integration between an intelligent tutoring system
and a virtual environment. In SCI2001, volume VIII,
pages 175–180, Orlando, FL. IIIS, IEEE Computer
Society.
Mendez, G., Rickel, J., and de Antonio, A. (2003). Steve
meets jack: the integration of an intelligent tutor
and a virtual environment with planning capabilities.
In Intelligent Virtual Agents. 4th International Work-
shop, IVA03, number 2792 in LNAI, pages 325–332.
Springer-Verlag.
Paiva, A. and Machado, I. (2002). Life-long training with
vincent, a web-based pedagogical agent. Interna-
tional Journal of Continuing Engineering Education
and Life-Long Learning, 12(1).
Pantelidis, V. S. (1996). Suggestions on when to use and
when not to use virtual reality in education. VR in the
Schools, 2(1):18.
Rickel, J. and Johnson, W. L. (1999). Animated agents for
procedural training in virtual reality: Perception, cog-
nition, and motor control. Applied Artificial Intelli-
gence, 13:343–382.
Rickel, J., Marsella, S., Gratch, J., Hill, R., Traum, D., and
Swartout, W. (2002). Toward a new generation of vir-
tual humans for interactive experiences. IEEE Intelli-
gent Systems, 17(4):32–38.
Shaw, E., Johnson, W., and Ganeshan, R. (1999). Pedagogi-
cal agents on the web. In Proceedings of the Third An-
nual Conference on Autonomous Agents, pages 283–
290, Seattle, WA, USA. ACM Press.
Sleeman, D. and Brown, J., editors (1982). Intelligent Tu-
toring Systems. Academic Press, London.
Wenger, E. (1987). Artificial Intelligence and Tutoring Sys-
tems: Computational and Cognitive Approaches to
the Communication of Knowledge. Morgan Kaufmann
Publishers.
INTELLIGENT VIRTUAL ENVIRONMENTS FOR TRAINING IN NUCLEAR POWER PLANTS
209
