
ARTIFICIAL INTELLIGENCE REPRESENTATIONS OF MULTI-
MODEL BASED CONTROLLERS
Asier Ibeas, Manuel de la Sen
Instituto de Investigación y Desarrollo de Procesos, Facultad de Ciencia y Tecnología
Universidad del País Vasco, Apdo. 644, 48080 Bilbao, Spain
Keywords: Multimodel control, artificial intelligence, neural networks, genetic algorithms, fuzzy logic, switching.
Abstract: This paper develops a representation of multi-model based controllers by using artificial intelligence typical
structures. These structures will be neural networks, genetic algorithms and fuzzy logic. The interpretation
of multimodel controllers in an artificial intelligence frame will allow the application of each specific
technique to the design of multimodel based controllers. A method for synthesizing multimodel based
neural network controllers from already designed single model based ones is presented. Some applications
of the genetic algorithms and fuzzy logic to multimodel controller design are also proposed.
1 INTRODUCTION
Multi-model based controllers have been broadly
studied during the last years (Narendra et al, 1997,
Gregorcic et al, 2001, Ibeas et al, 2003). This kind of
control architecture allows to design intelligent
control systems able to modify their behavior
according to the characteristics of a changing
environment or operation point. This intelligent
behavior, allows the stability and improvement of
the closed-loop output for complex systems. Thus, a
general multimodel based control scheme is formed
by a set of different plant models running in parallel.
These models, which may be fixed (Narendra et al,
1994) or adaptive (Ibeas et al, 2003), are different
one from each other in what it is concerned with its
structure or its parameter values. Thus, each one
contains different characteristics of the controlled
process. Moreover, a higher level switching
structure between the various models chooses at
each time the model which will be used to calculate
the control law at that time instant. The switching
structure chooses the control model according to a
performance index for the closed-loop system. Thus,
the switching law acts as a supervisor of the system
behavior. The structure and operation of the
switching law has been studied from an artificial
intelligence point of view in an expert systems
context (De la Sen et al, 2002). However,
multimodel structures itself, have always been
modeled in a classical control theory frame
(Narendra et al, 1997). This paper proposes a
possible interpretation of multimodel schemes in an
artificial intelligence frame. The artificial
intelligence structures chosen for such a goal have
been, artificial neural networks (ANN), genetic
algorithms (GA) and fuzzy logic. This interpretation
will allows the use of specific characteristics of each
one to the design of improved multimodel control
schemes. Thus, a method for synthesizing
multimodel-based neural network controllers from
pre-designed single model ones is proposed. Also,
some applications of genetic algorithms and fuzzy
logic to multimodel control design are presented. An
adaptive, being more general than that related to the
use of fixed models, formalism is used for making
the interpretation.
2 BASIC MULTIESTIMATION
SCHEME
In this Section, a brief description on the
multiestimation scheme used for discussion is
presented. It has been considered the adaptive case
since the fixed case is included in this as a particular
case. The aim is to design a multimodel control for
the discrete (the continuos case can be treated in the
165
Ibeas A. and de la Sen M. (2004).
ARTIFICIAL INTELLIGENCE REPRESENTATIONS OF MULTI-MODEL BASED CONTROLLERS.
In Proceedings of the Sixth International Conference on Enterpr ise Information Systems, pages 165-171
DOI: 10.5220/0002597801650171
Copyright
c
SciTePress
same way) time invariant linear SISO plant
described by:
11
() ()
kk
A
qy Bqu
−−
= (1)
where
k
u and
k
y are the input and the output
sequences respectively,
1
q
−
is the one-step delay
operator,
q is the one-step forward operator and
112
12
()1
n
n
A
qaqaqaq
−−− −
=+ + + +K (2.1)
11
01
()
m
m
B
qbbq bq
−−−
=+ ++K (2.2)
with
nm
≥ . The above Equations (1-2) represent a
linear difference equation which is usually written in
adaptive control as the inner product of two vectors
TT
k
kk
y
ϕ
θθ
ϕ
== (3)
[]
12 1
T
k
k k kn k k km
yy yuu u
ϕ
−− − − −
=− − −LL
being the so called regressor and
[]
12 01
T
n
m
a
aabbb
θ
= LL
symbolising the true plant parameter vector (Ibeas et
al, 2003). If the true plant parameter vector is
unknown, parameter estimation has to be used.
Thus, an estimated parameter vector
ˆ
k
θ
is considered
at each sample
k. This estimated vector is used for
control calculations at each sample. If this estimated
vector is far away from the real plant parameter
vector, then the transient response will have large
deviations from the desired output resulting in a bad
performance. This fact motivates to consider a set of
estimation algorithms running in parallel, each one
with its own estimated parameter vector
()
(1) (2)
ˆˆ ˆ
, ,...,
e
N
kk k
θθ θ
, where
e
N
is the number of total
estimators. Each estimated vector is updated at each
sample according to input and output measurements
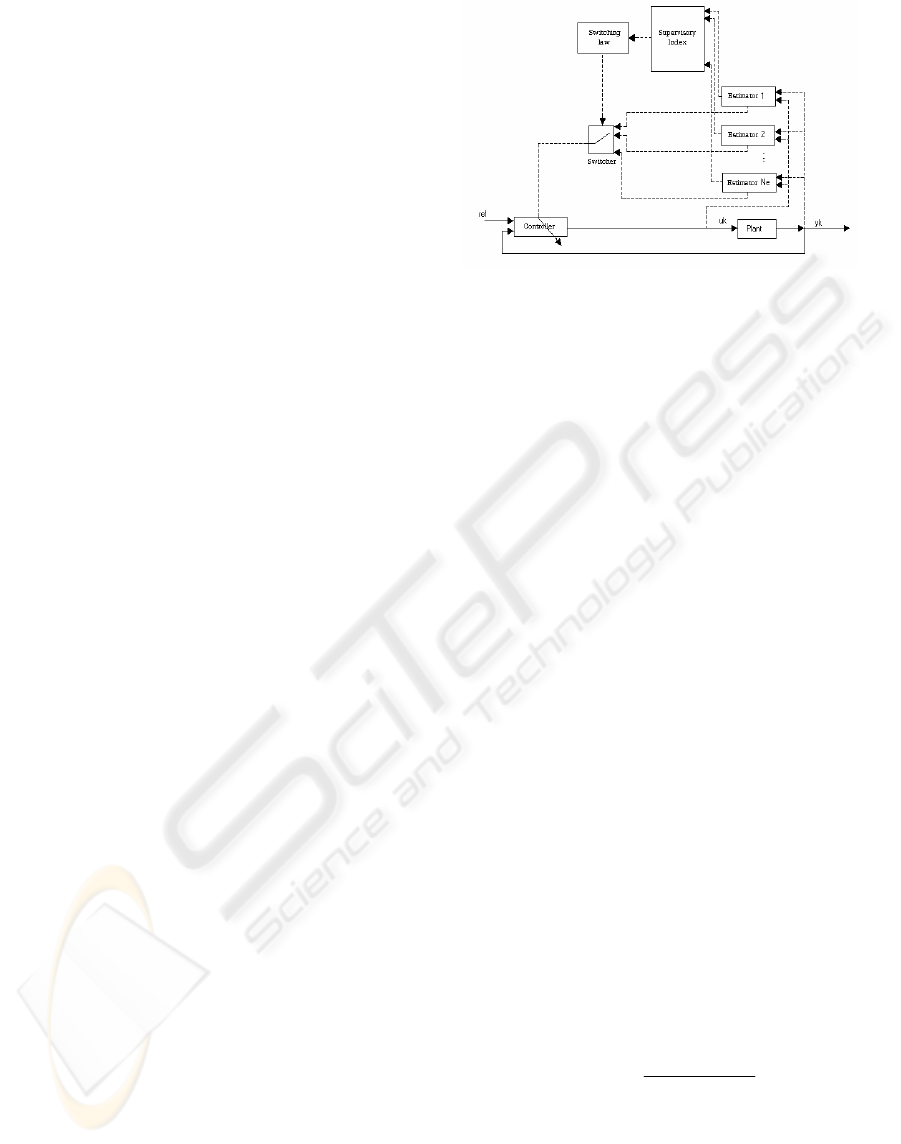
of the plant. The multiestimation scheme block
diagram is displayed in Figure 1. A switching logic
between the various estimation algorithms chooses
the estimated vector that achieves the best system
behavior improvement according to a prescribed
performance index
()
,1
i
se
J
iN≤≤ . The switching
law must respect a minimum
dwell or residence time
between consecutive switchings in order to
guarantee closed-loop stability.
Figure 1: Basic Multiestimation Scheme
A complete discussion of the stability issues is
available in (Ibeas et al, 2003). In the next sections
an artificial intelligence representation of the above
multiestimation scheme is given for various typical
artificial intelligence structures (Da Ruan, 1997).
3 ARTIFICIAL NEURAL
NETWORKS
In this section, an artificial neural network (ANN)
representation is developed for the above
multiestimation based control scheme (Fausett,
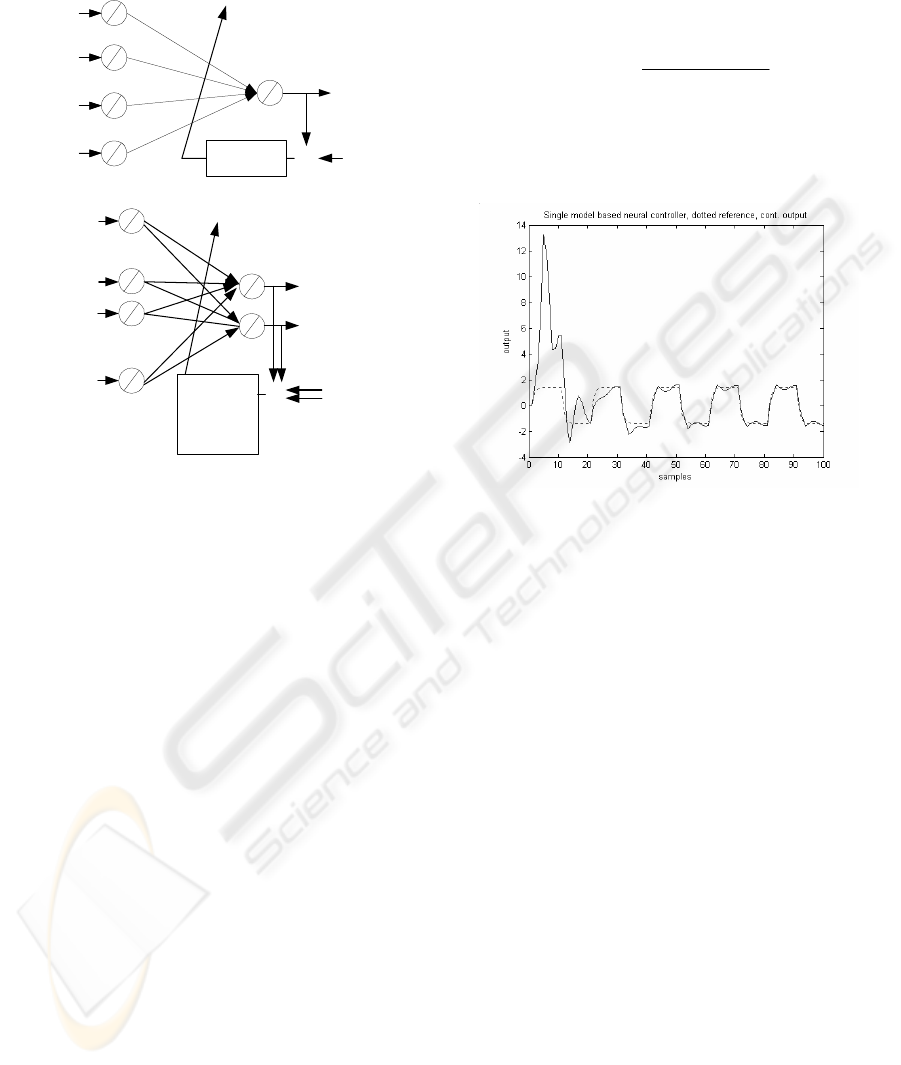
1998). In (Etxebarria, 1994), a two layered ANN is
presented for a discrete time single adaptive control.
The difference Equation (1)-(2) is implemented for
estimation purposes by the ANN displayed in Figure
2, where the activation functions are linear for all
neurons. The ANN output can be written as:
,1,
10
nm
T
k
ik k i n j k k j k
k
ij
ywy wuw
ϕ
−++−
==
=+ =
∑∑
(4)
where:
1, 2, ,
T
k
kk nmk
www w
+
⎡
⎤
=
⎣
⎦
K
and
ϕ
is the so called regressor. Comparing the
above Equation (4) with Equation (3), it can be
observed that network weights
,
ik
w
represents the
estimated plant parameters. Networks weights (or
plant parameters) are updated by using the well
known
Widrow-Hoff rule for single-output multiple-
input ANN:
()
1
1
11
ˆ
kkk
kk
T
kk
yy
ww
α
ϕ
εϕϕ
−
−
−−
−
=+
+
(5)
where
ˆ
y
denotes ANN output while
y
denotes real
measured plant output and
0
ε
> ,
()
0,2
α
∈ ,
(Etxebarria, 1994). Thus, network weights are
updating by comparing the network output with the
real plant output (which it is the target value). Then,
the estimated weights vector (which is the estimated
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
166
plant parameters vector) is used for controller design
purposes.
1k
y
−
M
M
M
⊗
Widrow-Hoff
Rule
k
y
+
-
kn
y
−
k
u
km
u
−
ˆ
k
y
1,
k
w
,
nk
w
1,
nk
w
+
,
nmk
w
+
Figure 2: Single neural network estimator
(1)
ˆ
k
y
(2)
ˆ
k
y
1k
y
−
M
M
⊗
k
y
k
y
+
+
--
Multiple
output
W idrow-Hoff
Rule
k
n
y
−
k
nm
u
−+
kn
u
−
11
w
21
w
1
n
w
2
n
w
1
n
m
w
+
2
n
m
w
+
Figure 3: Multiestimation neural network
Now, the multiestimation scheme presented in
Section 2 can be represented by increasing the
number of neurons in the output layer to a number
of neurons equal to the number of different
estimators used in the multiestimation scheme
. Since
the output layer has one neuron in this case, a
multiestimation scheme with
e
N
estimators running
in parallel will have
e
N
neurons in its output layer
as the Figure 3 displays for the case of two
estimators. Hence, the number of connections and
weights between neurons is increased. Thus, the
proposed ANN is an structure containing itself the
e
N
estimated parameter vectors (which are
represented by the corresponding weights). The
target vector (with which the ANN is trained) is
defined in this case by repeating the original target
value as many times as the number of estimators
used. If the original target value was the real
measured plant output,
k
y
, in the case with two
estimators, the new target vector is defined by:
[]
*T
k
kk
y
y=y
while in the general case with
e
N
estimators, it is:
*
e
T
k
kk k
N
y
yy
⎡⎤
⎢⎥
=
⎢⎥
⎣⎦
K
144
2
443
y
The switching logic compares each output of the
ANN with the real plat output and chooses the set of
weights associate with the best estimated output in
order to calculate the control law. The training rule
is the generalization of the above
Widrow-Hoff
single output training rule (5) to the multiple output
case:
()
()
,1
,,1
11
ˆ
i
kkjk
ij k ij k
T
kk
yy
ww
αϕ
εϕϕ
−
−
−−
−
=+
+
(6)
where
,1
jk
ϕ
−
stands for the j-th component of the
vector
1
k
ϕ
−
. Note that the updating law for the
estimated parameters vectors (network weights) is
formulated for the multiple output ANN as a unique
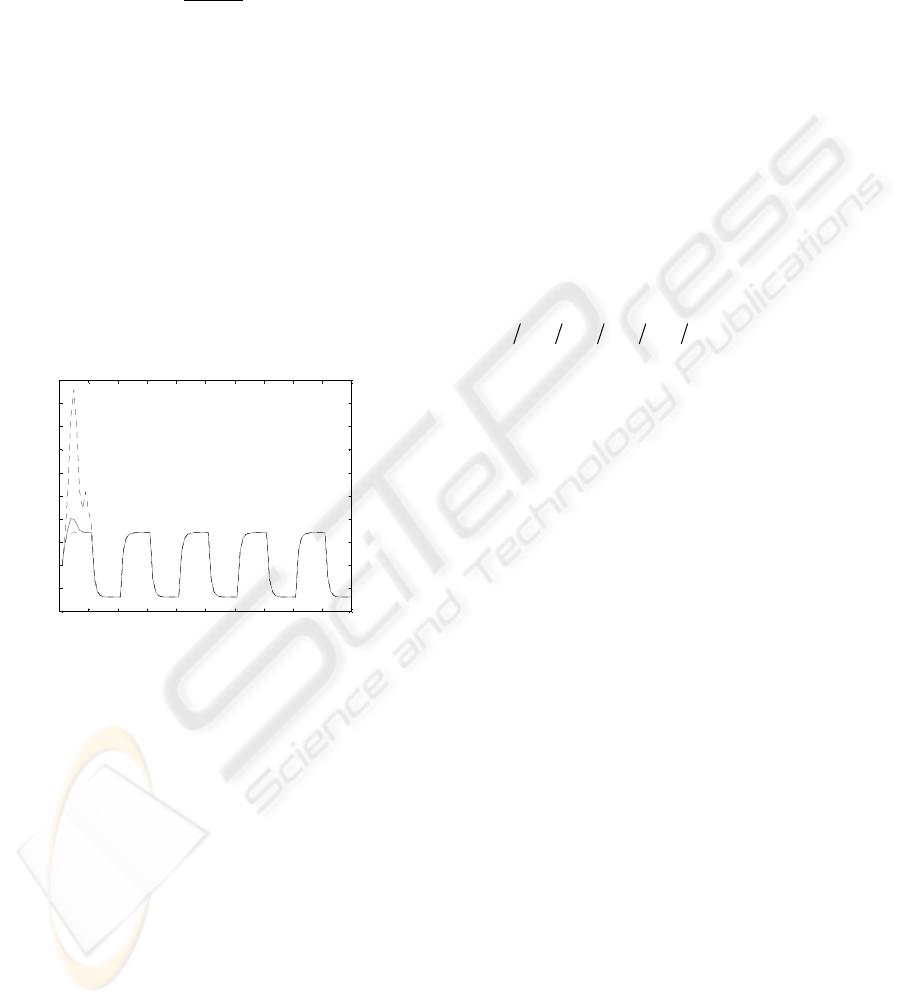
Figure 4: Single model based output
identity. In the following, a simulation example is
presented containing two estimation algorithms and
the above training rule. The switching logic is
assumed to respect a minimum residence time
between successive switchings in order to guarantee
closed-loop stability (Ibeas et al, 2003). The discrete
plant has the real plant parameter vector
[]
1
.9 0.73 0.195 1 0.6 0.087
5
T
θ
=− − − and
the reference model is:
[]
0
.6 0.11 0.006 1 0.32 0.025
5
T
m
θ
=− − −
while the estimators are initialised by the following
estimated parameter vectors (or network weights) :
[]
(1)
0
ˆ
0.5 0.25 0.5 0.79 0.5 0.08
T
θ
=− − −
[]
(2)
0
ˆ
1.5 0.7 0.2 0.9 0.5 0.08
T
θ
=−−−
It is taken
0.001
ε
= and
1
α
= . The input signal is a
unity square wave with a 20 samples period. The
residence time is 2 samples and the performance
index to decide switches is
()
2
() ()
1
ˆ
()
k
iki
s
Jk yy
λ
−
=
=−
∑
l
ll
l
(7)
with the forgetting factor
0.95
λ
= . The single
adaptive control scheme is initialised with the first
estimator. Simulations are showed in Figures (4-6).
ARTIFICIAL INTELLIGENCE REPRESENTATIONS OF MULTI-MODEL BASED CONTROLLERS
167
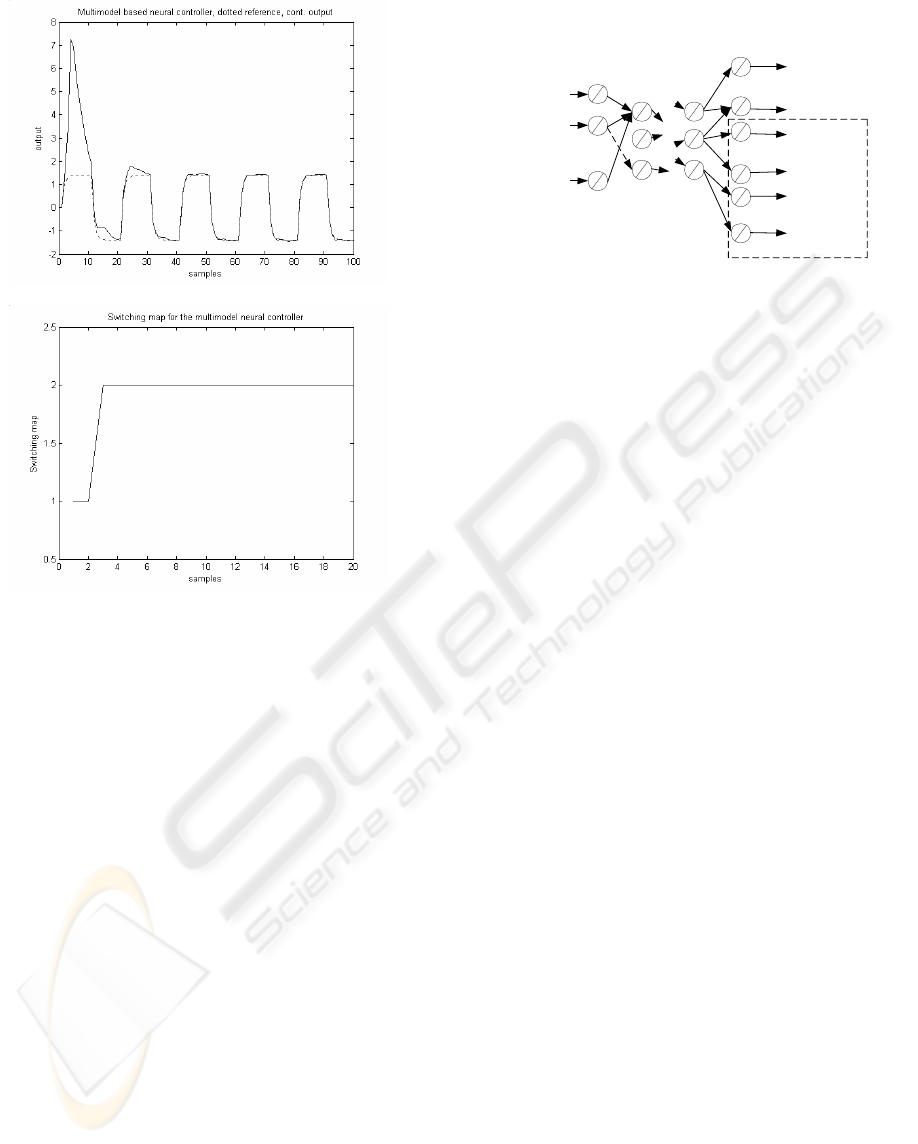
Figure 5: Multimodel based neural controller.
Figure 6: Switching map for the multimodel ANN.
It is showed that the system improves its behaviour
by using the best weight set at each time (respecting
the residence time constraint) Figures (4-5). The
switching map
k
c
illustrating the switching process
between both set of weights (parameters) is showed
in Figure 6. The above idea can be extended to the
most general case in which the ANN has a number
of layers greater than two and a number of neurons
in the output layer greater than one. Thus, the
following rule is proposed in order to obtain
multimodel based ANN controllers from a pre-
designed ANN single model one. Suppose that the
single model ANN has
N
l
layers and
o
N
neurons
in its output layer. Now, define a new ANN for the
multimodel structure as an ANN with the same
number of layers as the original one and a number of
neurons in the output layer equal to
'
o
e
o
N
NN=
where
e
N
is the number of estimators considered.
The target vector in this case is built by repeating the
original target vector (from the single model ANN)
as many times as the number of estimators
considered. The switching logic acts as an intelligent
supervisor deciding the set of weights that will be
used for control purposes. In such an easy way, the
multimodel structure can be integrated with
conventional neural network based controllers in
order to obtain more general ANN based multimodel
{
p
i
2
i
1
i
{
inputs
M
M
M
MMM
o
N
}
1
e
N −
}
}
}
o
N
o
N
M
L
N
l
outputs
(1)
1
out
(1)
q
out
(2)
1
out
(2)
q
out
()
1
e
N
out
()
e
N
q
out
Figure 7: General multimodel ANN scheme.
structures. The training rule is the same as in the first
ANN, extended to the new weights associated to
new connections. The general multimodel neural
network scheme is displayed in Figure 7.
4 GENETIC ALGORITHMS
In this Section, a genetic algorithm representation is
given for multiestimation based control schemes.
Genetic algorithms are usually used as optimisation
tools in complex problems (Beyers, 1998). The key
idea is to use the natural selection and the genetics
to obtain at each generation more accurate solutions
to an original complex problem. First, a codification
for the solutions for the proposed problem is
decided. The codification process consists of
deciding how the information about our problem has
to be managed by the genetic algorithm. The
codification may be formed by binary (formed by
1’s and 0’s) or numeric (natural, real,…) vectors.
These vectors are called chromosomes in the GA
context. In the multiestimation case, the
chromosomes will be vectors of real components
containing the plant parameter values. The best
vector is that for which the estimated output
(associated to that parameter vector) is closer to the
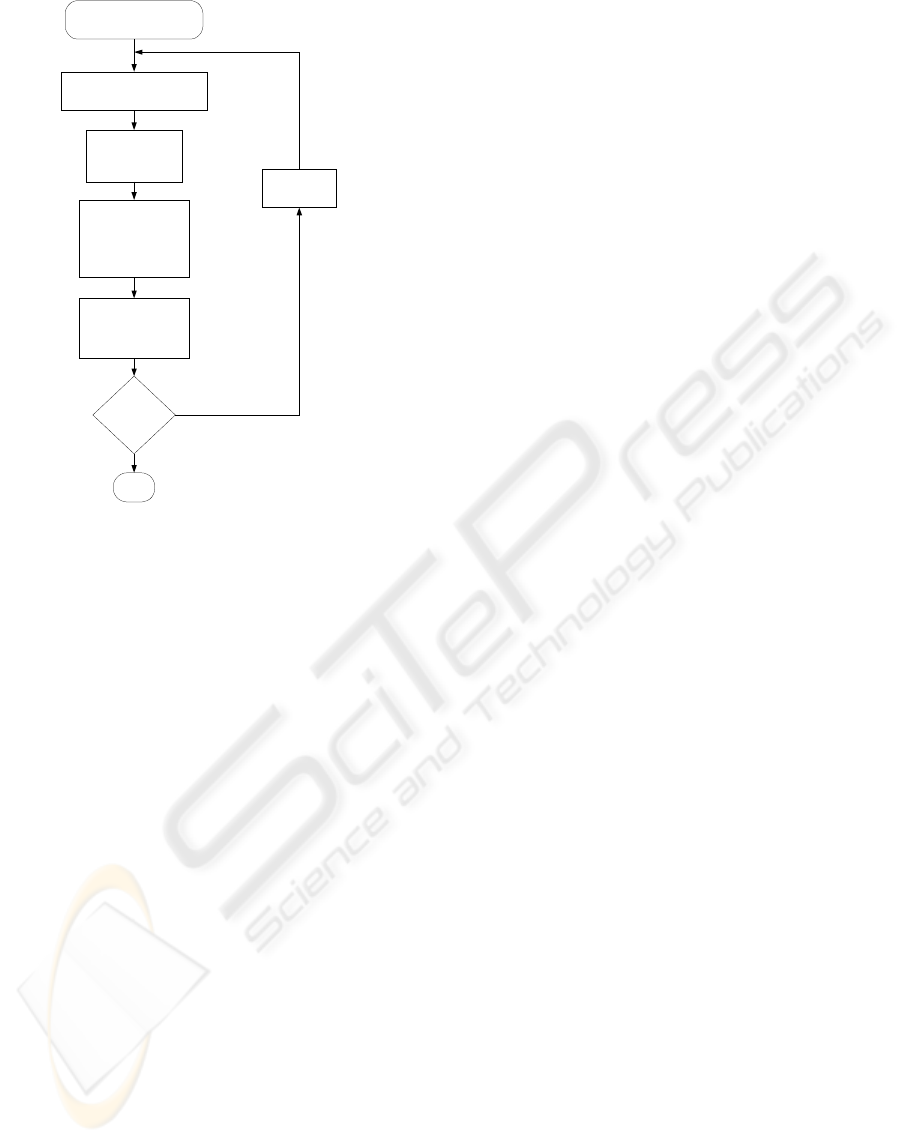
real plant output. A general description of a genetic
algorithm is given by the Figure 8. In the first step,
there exists an initial set of vectors uniformly
distributed over the possible parameter space.
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
168
Initial Population
(Initialization of the estimates vectors)
Evaluation of each individual fitness
(Performance index for each estimator)
Selection of the parents
(Slection of a subset of
potentially estimator
algorithms)
Generate the offsprings by
applying various genetic
operators, croos over,
mutation, ...
(Obtain the new vector from
the particular estimation
algorithm used)
Replace the population with
the new offsprings
(The new estimates vector are
used for control an supervision
purpouses)
Finish?
End
Next generation
(Next sample, step)
NO
YES
Figure 8: General structure of a genetic algorithm
This is a typical assumption in the adaptive control
problem, the existence of a convex and compact
subset of the parameter space where the real plant
parameter vector is assumed to belong to. Once the
GA is initialised it starts running. First, one of the
above vectors is chosen in order to generate the
control law. The selection is made according to a
performance index which evaluates the quality of
each vector (in the first step the choice may be
arbitrarily). The unique requirements about the
performance index (in a GA context) are that it must
be nonnegative and monotonically increasing with
quality, i.e., the better vector is that which has the
greater performance index. Then, the parameter
estimated vector are modified by applying some
modification rules. The modification rules may
depend on the value of the performance index
associate with each vector. In GA terms, these
modification rules are called, selection, crossover
and mutation. The adaptive counterpart is the
updating rule for the estimation algorithms such as
the least squares one or any of its variants for
example. Once the new chromosomes are obtained,
the algorithm evaluates the quality of each new
vector in order to obtain the best one and the process
is repeated so on. Note that the GA representation
allows a broad class of modification rules for the
estimated vectors which may not be driven by a
classical parameter updating equation. Furthermore,
the number of different models (the number of
chromosomes) may not be constant during the
system operation. This suggests the following
interesting idea for multimodel based controllers. If
the system detects that with a reduced number of
models an acceptable system behaviour is achieved,
then it may suppress some of the models
(chromosomes) in order to prune unnecessary
computations. Thus, the multiple models are
classified into priority sets in such a way that models
with a similar performance belong to the same set
(according to some performance criteria, for
example, all models with performance index inside a
prescribed range belong to the same set). Thus, the
sets associated to models with the worst
performance may be pawn from the GA process
while those sets containing the most accurate models
may be recompensed by increasing the number of
models inside them. Thus, from a general uniformly
spaced different models, the system is able to obtain
an improved number of models achieving an
acceptable system performance.
5 FUZZY LOGIC APPROACH
In this Section, a fuzzy logic approach is given for
multiestimation based control schemes. As it is
known, fuzzy set theory is a generalization of the
classical set theory (Tilli, 1992). It allows a class of
objects with a continuum grade of membership.
Such a set is characterised by a membership
(characteristic) function which assigns to each object
its grade of membership ranging from one to zero.
The classical set theory operations are extended to
the fuzzy case as well. Inference relations over fuzzy
set objects define the so called fuzzy logic. In the
multiestimation scheme presented in Section 2, an
estimated parameter vector is chosen from a set of
parameter estimated vectors to parameterise the
adaptive controller at each sampling time. However,
instead of choosing a single estimated vector, it is
also possible to define a combined estimated vector:
()
(1) (2)
1, 2, ,
ˆˆ ˆ ˆ
...
e
e
N
kkk kk Nkk
θαθ αθ αθ
=+ ++ (8)
where
,
01
ik
α
≤≤,
1
e
i
N≤≤
and
0
k∀≥ . This linear
combination (8), is convex in the sense that
,
1
1
e
N
ik
i
α
=
=
∑
,
0
k∀≥ . In the standard cases (considered
above and in (Ibeas et al, 2003)), only one
coefficient
,
i
k
α
is different to zero and equal to
unity. However, it is also possible to let each
coefficient
,
i
k
α
take a value between one to zero.
Then, we can interpret each one as a membership
ARTIFICIAL INTELLIGENCE REPRESENTATIONS OF MULTI-MODEL BASED CONTROLLERS
169
function of the combined estimated vector
ˆ
k
θ
to the
corresponding estimation algorithm with vector
()
ˆ
i
k
θ
.
The following membership function is proposed in
order to clarify the interpretation:
1
1
()
,
(
)
1
e
i
k
ik
N
k
J
J
α
−
−
=
=
∑
l
l
(9)
where the
()
k
J
l
symbolizes the performance indexes
for evaluating the quality of each estimation scheme.
A bigger performance index for an estimation
algorithm leads to a less membership function for
the combined estimated vector to the corresponding
estimation algorithm associate estimated vector. The
fuzzy logic approach allows that the membership
functions may be determined by linguistic rules as
If f(condition1, condition2,…,conditionN) is true
Then modify membership functions as (… rules…)
where f(·) is a logical function of its arguments. As
an example, it may be possible to avoid control
singularities associated with pole-zero cancellations
0 10 20 30 40 50 60 70 80 90 100
-2
-1
0
1
2
3
4
5
6
7
8
samples
output
Desired output(dashed), single adaptive (dotted) and combined adaptive (solid)
Figure 9: Comparison between classical and combined
schemes.
in pole placement control algorithms. Given a set of
estimated parameter vectors, add another vector (or
vectors) to the set. This vector (or vectors, which
may be fixed or updated at each sample) represents
coprime pole-zero polynomials. If the system is near
a control singularity (condition that can be detected
with a prescribed threshold by using the determinant
of the Sylvester matrix for example), then modify
membership functions in such a way that
singularities in the control law are avoided.
Membership functions are modified in order to make
more representative the coprime vectors in such a
way that the combined estimated vector remains
coprime. Thus, linguistic rules for specifying the
system behavior can be included in the system
operation increasing the way in which multimodel
based controllers can be designed. Each estimated
parameter vector is updated according to its
corresponding estimation scheme. The updating
of
the membership functions must respect a minimum
residence time in order to guarantee closed-loop
stability. The following simulations show the
usefulness of the proposed scheme. The plant, the
input signal and the performance index used in (9)
are the same as in the ANN example (7). The
estimation algorithm is of least squares type. The
residence time is 5 samples. There are five
estimators initialized by:
[]
(1)
0
ˆ
0.50.2 0.50.79 0.350.082
T
θ
=− − −
[]
(2)
0
ˆ
1 0.4 0.4 0.9 0.45 0.084
T
θ
=− − −
[]
(3)
0
ˆ
1.5 0.6 0.3 1 0.55 0.086
T
θ
=− − −
[]
(4)
0
ˆ
2 0.8 0.2 1.2 0.65 0.088
T
θ
=− − −
[]
(5)
0
ˆ
2.5 1 0.15 1.5 0.75 0.088
T
θ
=− − −
The initial values for the membership functions are:
[]
0
1
515151515
α
= and they are updated
by Equation (9) respecting the residence time
constraint. The single adaptive control scheme is
initialized by the first estimator. Figure (9) show a
simulation example of the proposed scheme.
6 CONCLUSIONS
In this paper, an artificial intelligence representation
of multiestimation based controllers has been
developed.
A neural network interpretation of
multimodel based controllers has been given while a
method for
generating multimodel based artificial
neural networks controllers from pre designed single
model ones has been proposed. A genetic algorithm
and fuzzy based approach has been given to
multiestimation based schemes. These artificial
intelligence techniques suggest new ideas and
directions to be incorporated to the classical
multimodel controllers.
ACKNOWLEDGEMENTS:
The authors are grateful to MEC and to the UPV-
EHU by its partial support of this work through
projects DPI2000-0244, DPI 2003-00164 ,UPV
1/UPV/EHU 00I06.I06.310 EB 8235/2000 and
9/UPV 00I06.I06-15263/2003.
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
170

REFERENCES
Beyers H.G. The Theory of Evolution Strategies. Springer,
1998.
Da Ruan (Ed.)
Intelligent Hybrid Systems, Fuzzy Logic,
Neural Networks and Genetic Algorithms
. Kluwer,
1997.
De la Sen M., Miñambres J.J., Garrido A.J., Almansa A.
and Soto J.C. Basic Theoretical Results for
Describing Expert Systems. Application to the
Supervision of Adaptation Transients in a Planar
Robots.
J. of Int. and Rob. Res. Vol. 35,nº1, pp. 83-
109, 2002.
Etxebarria V.. Adaptive Control of Discrete Systems
Using Neural Networks.
IEE Proc. Contr. Theory
and Appl
. Part D. Vol. 141, nº 4, pp. 209-215, 1994.
Fausett, L.V.
Fundamentals of Neural Networks. Prentice,
1998.
Gregorcic G., Mullane A. and Lightbody G., Simulink
Implementation of Adaptive Control and Multiple
Model Network Control.
Proc. Of the Nordic Matlab
Conf.
Pp. 167-173, Oct. 2001.
Ibeas A., de la Sen M. and Alonso-Quesada, S., Adaptive
Stabilization of discrete linear systems via a
multiestimation scheme.
Inter. Math. J. Vol. 3,nº, 4,
pp. 381-408, 2003.
Narendra, K.S. and Balakrishnan J., Improving transient
response of adaptive control systems using multiple
models and switching.
IEEE Transactions on
Automatic Control,
39 no. 9, pp. 1861-1866, 1994.
Narendra K. S. and Balakrishnan J., Adaptive control
using multiple models,
IEEE Transactions on
Automatic Control,
42 no. 2, pp. 171-187, 1997.
Tilli, T..
Fuzzy Logic, Franzis-Verlag, 1992.
ARTIFICIAL INTELLIGENCE REPRESENTATIONS OF MULTI-MODEL BASED CONTROLLERS
171
