
FAST EVENT DETECTION IN MPEG VIDEO
Rui Marcelino, Vitor Silva and Sérgio Faria
School of Technology, University of Algarve, Faro, Portugal
Institute of Telecommunications, DEEC, University of Coimbra, Coimbra, Portugal
School of Technology and Management, Polytechnic Institute of Leiria, Leiria, Portugal
Keywords: MPEG video, video compression, video surveillance, motion detection
Abstract: Many video applications, such as surveillance systems are continuously increasing and the amount of
processed and stored data has risen exponentially
. In order to manage efficiently this video information,
motion detection is necessary. This feature is required to analyze, organize and store compressed video. In
this paper, we present an effective video event detection method, which uses information embedded in the
MPEG-4 bit stream to detect true motion in the scenario, avoiding other features like scene cuts and camera
translation, zooming, pan, tilt and oscillations These events can be detected very fast and with low
computational complexity, as only few parameters of the compressed data are processed. This algorithm
mainly relies on the amount of signal variation of AC coefficients, between co-localized intra coded blocks,
and the amount of motion compensated coded macroblocks within inter coded frames. Our results have
shown that this algorithm can perform not only accurate motion detection, but also identifying false motion
due to camera movements.
1 INTRODUCTION
Video motion detectors for digital compressed
domain interfaces are a key tool in modern
surveillance system architectures (C. S. Regazzoni et
al, 2001). They allow remote sensing over data
networks and the processed data can be easily
recorded and integrated in computer applications,
for helping human operators in supervision tasks.
A typical surveillance scenario may include a
vi
deo camera, or a set of cameras, pointing to a quite
zone, for long periods of time. Thus, most of the
time, the received visual information is useless.
However, when an important image change occurs,
like human intrusion, the operator should be
automatically warned and the recording system must
be triggered. When these cameras are installed in
remote places, video compression is required, prior
to the transmission. At the receiver, the compressed
signal (bit stream) can be either decompressed and
visualized by an operator or stored. Usually it has to
be decompressed down to the pixel domain, either
for human visualization or to be processed for
feature extraction. However, most of the feature
extraction can be performed using parameters
included in the compressed data, without completely
decompressing the video bit stream. This task can be
performed by an efficient and intelligent method
using a motion detector.
Several methods and approaches for motion
detection have been proposed in the literature
(I.
Koprinska et al, 2001). Motion detection can be
performed in pixel domain, or uncompressed
domain, using features extracted from the digital
spatio-temporal video representation, with very
computational demanding techniques (I. Koprinska
et al, 2001), (A. Albiol et al, 2003).
Since we assume the digital video signal is
com
pressed using MPEG-x standards (F. Pereira and
T. Ebrahimi, 2002), the motion detection can be
done using the information embedded in the bit
stream (I. Koprinska et al, 2001), (J. Pons et al,
2002), (B. Yeo and B. Liu, 1995), (S. Pei and Y.
Chou, 1999), (S. Lee et al, 2000). By partially
decoding (parsing) the coded bit stream, one can
find quickly and easily the useful information to
build a motion detector (J. Pons et al, 2002). Such
techniques are designated by compressed domain
solutions.
264
Marcelino R., Silva V. and Faria S. (2004).
FAST EVENT DETECTION IN MPEG VIDEO.
In Proceedings of the First International Conference on E-Business and Telecommunication Networks, pages 264-268
DOI: 10.5220/0001386002640268
Copyright
c
SciTePress

The main purpose of this work is to use, as much
as possible, the embedded information, taking
advantage of the huge amount of analysis work
performed by the MPEG video encoder.
Furthermore, only few parameters have to be
adjusted in the detector, regarding to the class of the
moving object in scene. This class is related to the
dimension of the moving object in scene and to the
distance between the object and the camera. This
image classification will increase the accuracy of the
motion detector.
In the following sections we will describe an
efficient and low complexity scene change detector
algorithm, which is able to detect significant visual
events from a partially decoded MPEG bit stream. In
section 2 we introduce MPEG standard and in
section 3 the proposed algorithm is described. Some
results are shown in section 4 and conclusions are
presented in section 5.
2 MPEG BIT STREAM
INFORMATION
MPEG encoders use a hybrid algorithm to compress
video, by classifying and processing each frame as
intra coded (I frame) or motion compensated inter
coded (P and B) (F. Pereira and T. Ebrahimi, 2002).
Intra frame pictures are encoded only using pixels
within a frame, exploring the spatial redundancy
with 8×8 DCT (Discrete Cosine Transform) blocks
are transformed and DC and AC coefficients are
entropy coded. P frames are encoded using motion
compensated prediction from a past I/P frame, in
order to remove the temporal redundancy. B frames
are encoded using motion compensation prediction
from both past and/or future encoded I/P frames.
Video frames are organized in regular structures
called group of pictures (GOP). Each frame (VOP)
is divided into blocks of 16×16 pixels, called
macroblocks (MB). Furthermore, each macroblock
is divided into six 8×8 pixel blocks. After motion
compensation, the residual image may also be
divided into 8×8 pixel blocks, which are intra coded.
Thus, a macroblock contains information about the
type of temporal prediction used (or not) for motion
compensation, which can be classified as intra
coded, forward referenced, backward referenced,
interpolated or direct. While MBs inside an I frame
are intra coded, each MB in a P frame is either
forward predicted, intra coded or skipped. Similarly,
each MB in a B frame is either forward predicted,
backward predicted, bidirectionally predicted, intra
coded or skipped.
3 COMPRESSED DOMAIN
MOTION DETECTION
In this section, we explain how motion detection is
performed without fully decoding the bit stream.
The proposed method mainly relies on the analysis
of AC coefficient’s signal of I frames (section 3.1)
and on the motion vector information of P and B
coded frames (section 3.2). The main objective is to
detect only motion related to the moving objects in
the scene, eliminating camera switching (scene cuts)
and some typical camera movements, which occurs
in video surveillance scenes.
13
3.1 Motion detection
In most surveillance applications, systems acquire
and store images continuously, then a huge amount
of information is required to be stored. In this case a
high compression ratio is desirable. It is also
common, that for long periods of time there are no
motions in the scene. Thus, VOPs of type I can be
sparser, which increases significantly the
compression ratio. In this sense, we propose a
hierarchical algorithm that processes the compressed
video information in two stages.
At the first stage, only I VOPs are analyzed, in
order to check the signal variations between AC
coefficients of two co-localized blocks in
consecutive I VOPs. In order to speed up the
process only a small set of significant coefficients
are checked, and blocks with a number of
coefficients with signal variation larger than 5 is
used. When a number of blocks in this condition
exceed a certain threshold, the image is regarded as
containing a moving object. This threshold is
obtained regarding the average and the variance of
the number of blocks containing more than 5 signal
variations. We also have to deal with homogeneous
surfaces and illumination changes, which tend to be
detected as motion. When a VOP of type I is
detected with moving objects, the algorithm moves
to the second stage for a motion detection
refinement.
At the second stage, motion vectors of P and B
VOPs are analyzed, in order to check the amount of
motion vectors (MV) used to encode each inter
frame. If the number of non-zero MVs exceeds a
threshold given for that class (section 3.3) of
surveillance scene, then the VOP is regarded to
contain a moving object.
After this step, it may happen that some motion
detections are false, due to camera switching (scene
cuts) or camera motions. These false motion
FAST EVENT DETECTION IN MPEG VIDEO
265
detection events have to be eliminated, in order to
increase the algorithm efficiency. Thus, a scene cut
detection method is used (A. Hanjalicl, 2002), (J.
Calic and E. Izquierdo, 2002), (Y. Haoran et al,
2003) and the camera motion is detected (R. Wang
and T. Huang, 1999), as explained in section 3.2.
Finally, a report is generated and objects in a
moving scene are decoded for visualization.
3.2 Camera motion
Camera movements like: pan, tilt, zoom, shaking
and vibration, caused by wind in outdoor
environments, are sources of false positives motion
detections. In order to remove such false positives,
we have incorporated in our method a camera
motion estimation module.
The camera motion, mentioned above, is well
characterized in a frame analysis, by a large number
of forward predicted MB and near homogeneous
vector fields.
Figure 1: Motion vectors field for a zoom-in and zoom-out
movement (static background MBs are dark colored)
In Figure 1, the CIF “Telex” sequence represents
a zoom-in (left image) and zoom-out (right image)
camera motion focusing a Telex equipment. This
type of motion generates a large amount of motion
vectors, which can be divided in various sub-sets of
vectors with radial direction. When the image
texture is not homogeneous, a large number of MBs
are encoded with motion vectors, whose intensity
depends on the camera motion. Otherwise, when
there are homogeneous texture the number of
motion compensated (MC) coded MB is reduced, as
can be seen in figure 2, where static background
MBs are dark colored.
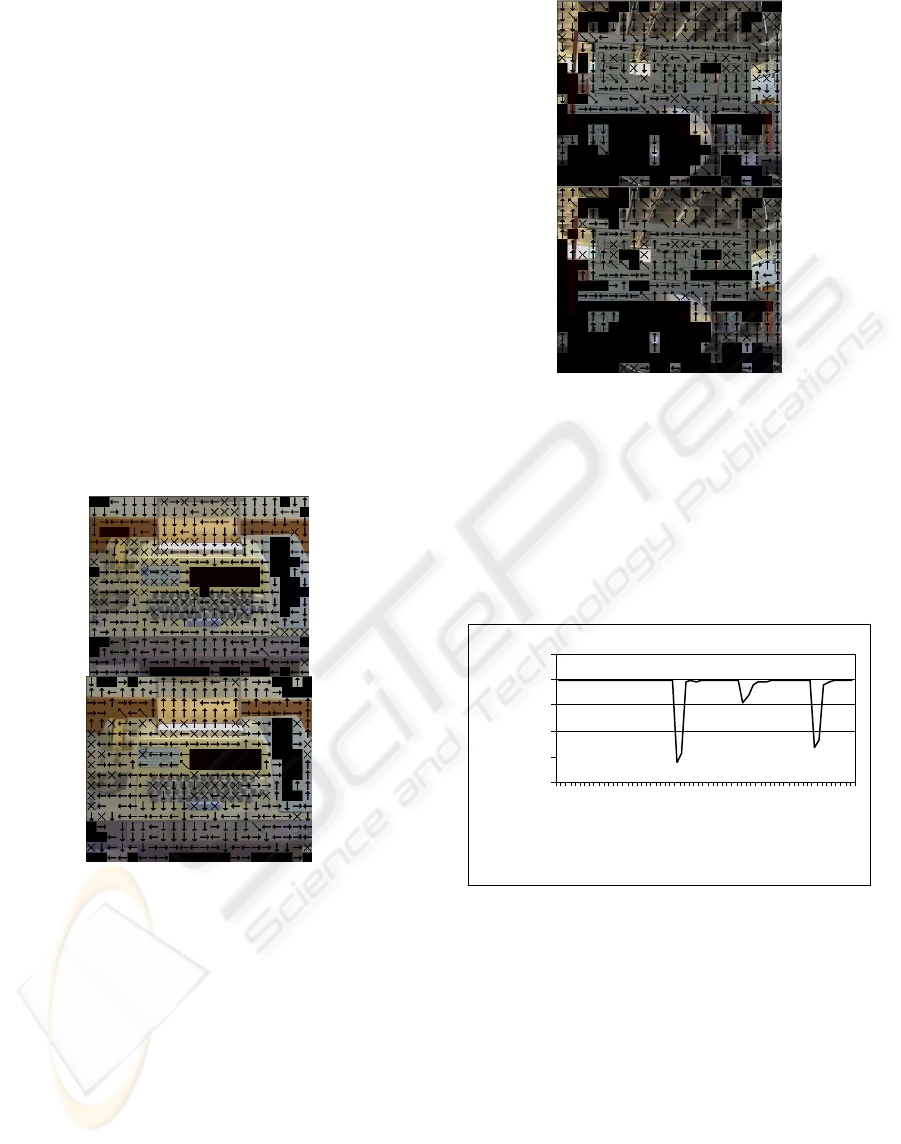
Figure 2: Motion vector’s field for a camera oscillation
Using VOPs 216 and 219 of the CIF video
sequence called “Room121”, we have tested the
algorithm for detection of false motion when camera
oscillation occurs. In the left image of Figure 2, we
have a zoom-in and in the right image a zoom-out.
From the analysis of the motion vector’s direction,
the MVs inversion in the direction can be detected
between both images.
0
100
200
300
400
500
0
27
54
84
111
1
38
1
68
1
95
22
2
VOP Nº
Nº of MB with 0MV
Figure 3: Oscillation detection
Additionally in Figure 3, we show the huge
reduction in the amount of MBs with null MVs,
when a camera motion occurs. For example the
oscillation in VOP 219 can be clearly detected.
3.3 Scene classification
The scene classification is an important issue, as it is
directly related to the motion detection. This task
must be performed by an operator, regarding the
surveillance camera system, namely, distance from
the scene, zoom lens and target object’s size. Thus,
we have divided the surveillance scenes in three
classes: A, B and C. These classes have a direct
ICETE 2004 - WIRELESS COMMUNICATION SYSTEMS AND NETWORKS
266

correspondence to the number of expected blocks or
macroblocks with non-zero motion vectors, within a
VOP. The chosen threshold directly determines the
detection performance. Due to such direct mutual
dependence, the detection performance is highly
sensitive to specified parameter values. Beside the
threshold sensitivity, the problem of specifying such
a precise value remains and, consequently, the scope
of the validity of such an accurate threshold is
highly questionable. Clearly, manual threshold
specification cannot be avoided in practical
implementations. Thus, there must have an
installation and set-up phase where the sensitivity of
the motion sensor must be adjusted. However, the
influence of these parameters on the detection
performance can be diminished and the detection
can be made more robust if we use lower threshold
levels. In fact, it is preferable a false alarm rather
than a missed alarm.
4 EXPERIMENTAL RESULTS
In this section, we evaluate our motion detector for
video surveillance systems. We have performed a
set of experiments using videos obtained from
surveillance systems installed in the campus, which
have been encoded in MPEG-4 format with CIF
spatial resolution.
Figure 4: Test sequences: Pupils, Hall, Door125 and Park,
in this order
The length of these videos is between 241
(Pupils) and 846 (Park) frames long. The original
sequences are illustrated in figure 4 as Pupils, Hall,
Door125 and Park, were carefully obtained in order
to include many effects, covering the largest number
of different situations. The experimental results
demonstrate the efficiency of the proposed motion
detection algorithm.
Figure 5: Encoded MBs referenced as black squares
Figure 5 gives an example of motion detection
results in various sequences scenes. No filter is used
and some MBs have been coded due to noise and
object’s shadow.
Table 1: Precision and recall results
The performance is given in terms of precision
and recall parameters (U. Gargi et al, 2000),
C
CE
N
precision
NN
=
+
,
C
CM
N
recall
NN
=
+
, (1)
where N
C
is the number of correct motion
detections, N
E
is the number of incorrect motion
detections and N
M
is the number of missed motion
detections.
These results from our experiments presented in
table 1, illustrate precision and recall values very
close to 100% and 90%, respectively, for most
sequences. Although rates of true and missed
detections are not precisely the same for all
sequences, there are no outliers in the performance.
We can say that the performance of this detector
remains relatively consistent over all sequences.
Those values of Park sequence are related to the
appearance in scene of moving objects of distinct
classes. These are cars in the natural plane of the
Sequence Length
Precision
(%)
Recall (%)
Pupils 241 100 90
Hall 308 100 87
Door125 392 97 92
Park 846 79 65
FAST EVENT DETECTION IN MPEG VIDEO
267

scene and other cars parking at a long distance from
the camera, almost indistinguishable points in the
scene.
5 CONCLUSIONS
In this paper we propose an efficient and low
complexity unsupervised hierarchical motion
detection algorithm for surveillance systems, and
showed its performance using MPEG-4 video
compression data. The key idea of this motion
detector is to analyze the motion vector information,
embedded in the compressed data and decide if they
represent object’s motion in the scene.
In case it does not represent true motion in the
scene, motion vectors data is analyzed to determine
the meaning of the false motion detection. Various
techniques have been implemented to detect: scene
cuts, zoom, camera translation and camera
oscillation. These methods strongly reduce the
incorrect motion detection rate.
REFERENCES
C. S. Regazzoni, V. Ramesh and G. L. Foresti (Eds.),
“Special Issue on Video Communications, Processing
and Understanding for Third Generation Surveillance
Systems”, Proceedings of IEEE, vol. 89, nº. 10,
October 2001.
I. Koprinska and S. Carrato, “Temporal Video
Segmentation: A Survey”, Signal Processing: Image
Communication, vol. 16, pp. 477-500, 2001.
A. Albiol, C. Sandoval, A. Albiol, V. Naranjo and J. M.
Mossi, “Robust Motion Detector for Video
Surveillance Applications”, in Proc. IEEE ICIP 2003,
September 2003.
F. Pereira and T. Ebrahimi (Eds.), The MPEG-4 Book,
Prentice Hall PTR, 2002.
J. Pons, J. P. Nebot, A. Albiol and J. Molina, “Fast Motion
Detection in Compressed Domain for Video
Surveillance”, Electronics Letters, vol. 38, nº. 9, pp.
409-411, April 2002.
B. Yeo and B. Liu, “Rapid Scene Analysis on Compressed
Video”, IEEE Trans. on Circuits and Systems for
Video Technology, vol. 5, nº. 6, pp. 533-544,
December 1995.
S. Pei and Y. Chou, “Efficient MPEG Compressed Video
Analysis Using Macroblock Type Information”, IEEE
Trans. on Multimedia, vol. 1, nº. 4, pp. 321-333, Dec.
1999.
S. Lee,Y. Kim and S.Choi,“Fast Scene Detection using
Direct Feature Extraction from MPEG Compressed
Videos”, IEEE Trans. on Multimedia, vol. 2, nº. 4, pp.
240-254, Dec. 2000.
A. Hanjalic, “Shot Boundary Detection: Unraveled and
Resolved?”, IEEE Trans. on Circuits and Systems for
Video Technology, vol. 12, nº. 2, pp. 90-105, February
2002.
J. Calic and E. Izquierdo, “Temporal Segmentation of
MPEG Video Streams”, EURASIP Journal on Applied
Signal Processing, nº. 6, pp. 561-565, 2002.
Y. Haoran, D. Rajan and C. L. Tien, “A Unified Approach
to Detection of Shot Boundaries and Subshots in
Compressed Video”, in Proc. IEEE ICIP 2003, Sep.
2003.
R. Wang and T. Huang, “Fast Camera Motion Analysis in
MPEG Domain”, in Proc. IEEE ICIP 1999, vol. 3, pp.
691-694, October 1999.
U. Gargi, R. Kasturi and S. Strayer, “Performance
Characterization of Video Shot Change Detection
Methods”, IEEE Trans. on Circuits and Systems for
Video Technology, vol. 10, nº. 1, pp. 1-13, February
2000.
ICETE 2004 - WIRELESS COMMUNICATION SYSTEMS AND NETWORKS
268
