
A Robotic Set-Up With Remote Access For “Pick and
Place” Operations Under Uncertainty Conditions
Aldo Balestrino
1
, Antonio Bicchi
2
, Andrea Caiti
1
, Torquato Cecchini
1
,
Lucia Pallottino
2
, Andrea Pisani
2
, and Giovanni Tonietti
2
1
Dipartimento di Sistemi Elettrici e Automazione, Pisa, Italy
2
Centro Interdipartimentale di Ricerca “E. Piaggio”, Pisa, Italy
Abstract. The work describes on-going work at the University of Pisa on the
field of tele-laboratories and distance learning. In particular, the group is working
at the evolution of existing tele-laboratory experiments in the field of robotics
and control into learning units of a self-consistent didactic project. The pick-and-
place system described has been designed to provide the set-up for robot arm
motion planning with specific objectives and evaluation tools.
1 Introduction
The interest of the System, Control and Robotics research group at the University of
Pisa in exploiting Internet and web-based technologies for remote instructional ac-
tivities dates back to several years ago [1]. The initial motivation has been the need
to provide hands-on experience to engineering students in mechanical and electronic
courses. The increasing number of students at the University of Pisa, coupled with con-
straints to laboratory space and budget, has led to the choice of remote, web-based
access (”tele-laboratory”) as the sole possibility to maintain a widespread didactic link
between theoretical notions and experimental practice. Through the years, a number of
didactic experiences have been developed, at different levels of difficulty and student
skills [1–4]. Similar experiences have been documented by several others laboratories
world wide. A recent review as for robotic applications can be found in [5].
Since the last year, our group is part of two related projects, sponsored by the Ital-
ian National Res. Council (CNR) and the Italian Ministry of Education and Research
(MIUR), having as objective the development of a distributed e-learning environment
in the field of robotics and automation systems. The projects team together Italian labs
with previous tele-laboratory experiences, and have the aim of steering the evolution of
tele-laboratory activities into complete learning units of a common instructional project.
Within this framework, one of the task of our group is to provide a previous avail-
able tele-laboratory set-up with tools for evaluation and student skill self-assessment.
The set-up consists of a robotic arm and of a graphic language for robot motion plan-
ning. This paper briefly describes our on-going work toward this objective. In particu-
lar, to provide a goal for the students, the set-up (mechanics, electronics and software)
has been enlarged to include a pick-and-place experiment; perturbation to the planned
Balestrino A., Bicchi A., Caiti A., Cecchini T., Pallottino L., Pisani A. and Tonietti G. (2004).
A Robotic Set-Up With Remote Access For “Pick and Place” Operations Under Uncertainty Conditions.
In Proceedings of the First International Workshop on e-Learning and Virtual and Remote Laboratories, pages 144-149
DOI: 10.5220/0001152101440149
Copyright
c
SciTePress

motion, as well as sensor feed-back at the planning level, have also been introduced.
The students have to devise a high level motion-planning algorithm able to fulfill the
pick-and-place task vis-a-vis the introduced uncertainty. Quantitative performance eval-
uation (for final student skill assessment and for self-assessment as well) is obtained by
defining two distinct measures, one for algorithm efficiency and one for algorithm com-
plexity.
2 The Set-Up
The developed set-up consists in a hardware platform, a graphic language for robot
motion planning and a remote interface system which are briefly described in the fol-
lowing.
Fig. 1. A picture of the anthropomorphic arm SCORBOT ER-V PLUS.
Fig. 2. The anthropomorphic arm SCORBOT ER-V PLUS.
143
2.1 The hardware platform
As already mentioned a Pick and Place task has been considered as educational test. For
this purpose the robotic arm SCORBOT ER-V PLUS (see Fig. 1,2) has been choosen.
The Scorbot has 5 degrees of freedom and a gripper end-effector with two fingers.
Furthermore, a joint control system is available and programmable through the ACL
command language primitives.
The Scorbot robot is mounted on a 0.7m diameter platform sheltered by a plexiglas
protection. The platform holds also the object for the Pick and Place task, the initial po-
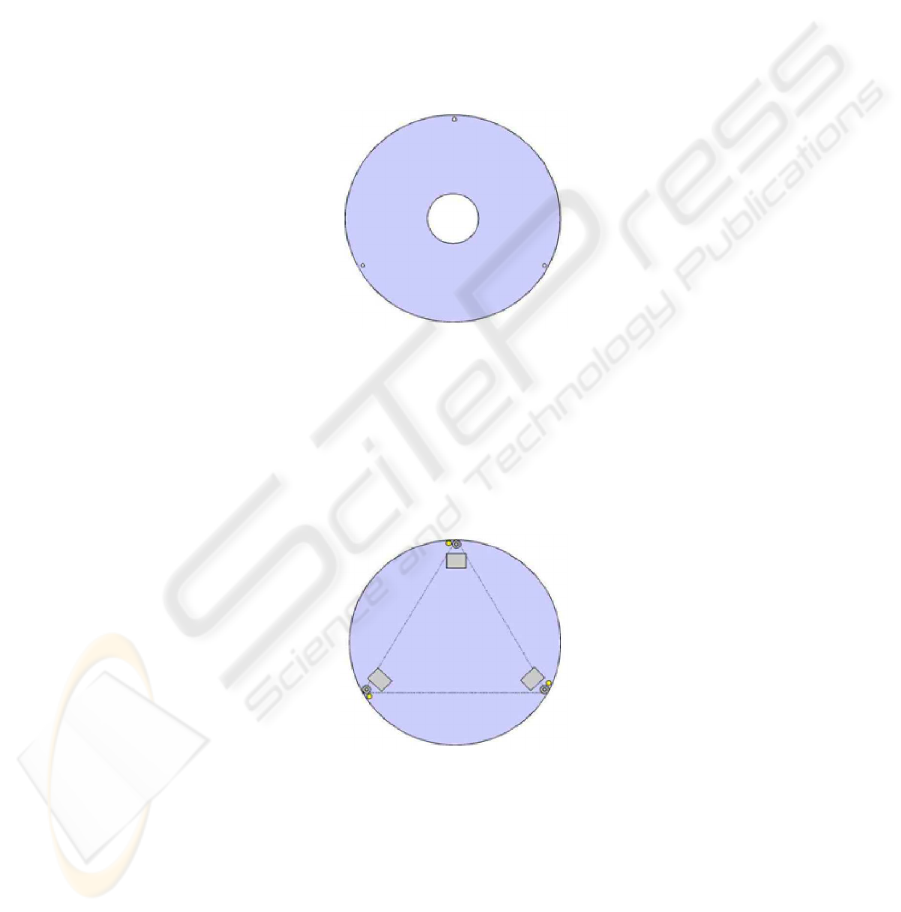
sition retrieval system and the Place circular target mounted at the center of a sensorized
plate (see Fig. 3).
Fig. 3. The placing target has been realized in the center of the sensorized plate.
The sensorized plate is anchored with springs and dampers positioned at the ver-
tices of an equilateral triangle; such anchoring system guides and constraints possible
movements of the sensorized plate (see Fig. 4). A contact switch is positioned at the
Fig. 4. The figure shows the equilateral triangular disposition of contact switch.
base of each spring-damper column. With this system, an incorrect placing leads the
object in contact with the sensorized plate. It is possible to detect in which zone of the
plate the object is positioned on the basis of the geometrical information from switch
144
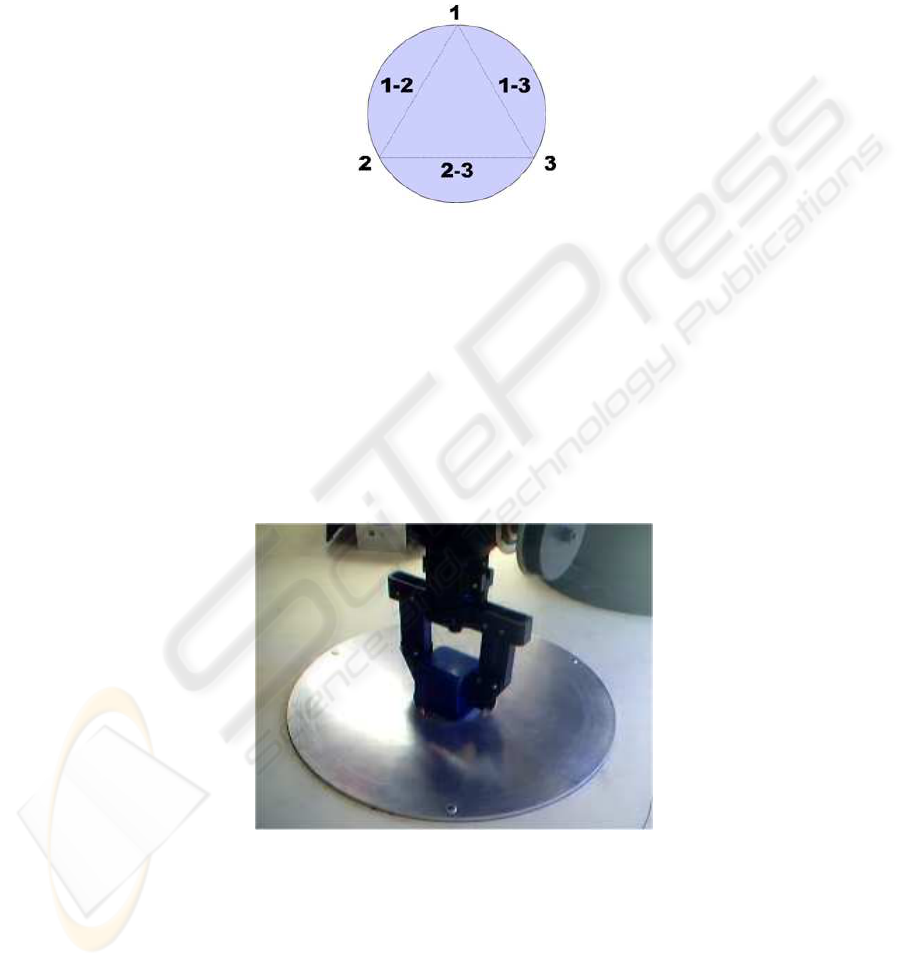
sensors (see Fig. 5). It is then possible to plan the subsequent movement to correct the
placing error. The considered system is quite precise with respect to the Pick and Place
task of non micro object. In order to make the task more challenging for the end-user, a
random noise on the arrival desired position has been introduced.
Fig. 5. The switch configuration enable the object localization on the sensorized plate in case of
failed placing task.
The pick and place task can be planned and executed several times thanks to a
retrieval system. Indeed, at the end of each experiment, the object placed in the target
position is brought back to the initial position for a new pick task by a cable and a low
power motor system mounted below the platform. Furthermore, such retrieval system
allows the set-up to be used also after failures such that erroneous placing position or
object loss from the gripper during robot arm movements. The sensorized plate and the
gripper are shown in figures 6.
Fig. 6. The sensorized platform with the gripper
It is important to underline that, besides the Pick and Place task, the end-user can
plan and execute arm movements in the whole feasible workspace.
145

2.2 A graphic language for a high level programming of the Robot
The GeT language, initially developed at Centro Piaggio [6, 7], has been updated with
a set of flow commands and with primitives for sensor reading. The end-user first pro-
grams his own algorithm for the pick and place execution, the program is then tested by
simulation. If, during simulation, no failure is caused by language syntax or by violation
of physical constraints related to the manipulator workspace, the program is executed
on the experimental tool.
2.3 A remote interface system
A remote interface system has been developed for several purpose. One of the most im-
portant thing is control of access at the set-up and the user identification: the former to
monitor possible bad attacks and safeguard the experiment, the latter for a documenta-
tion of users evaluation from the teacher. The remote interface manages also the visual
feedback based on a camera viedo streaming fundamental for a remote user. Finally, the
remote interface manages also experimental results transmission and manipulation, as
described in next section.
3 Learning process through experiments
The learning of motion planning for robotic arms through the particular Pick and Place
task has two main purposes: from one side it allows a stimulating and challenging end-
user learning; from the other side it permits a quantitative evaluation of the skill reached
by the user as described in the following.
Two different criteria are used to evaluate the motion planning designed by the end-
user: the first criterion is the motion planning algorithm complexity, computed on the
basis of the number of GeT language instructions of the developed program; the sec-
ond criterion is the algorithm efficiency measure, computed on the basis of the mean
number of robot arm operations for the placing task. Obviously, it is awarded to the
algorithm that leads to a correct placing with the lowest number of operations. The
end-user can use those measures for auto-evaluation through the comparison with eval-
uation obtained by other users. The set of the evaluations allows the determination of a
minimum threshold for the student final mark of the global learning process.
4 Conclusion
Currently the experimental set-up described in this paper is available in the DSEA fire-
wall system and accessible only from the department intranet. Software tools for the
user evaluation, the experiment documentation and the educational support material are
under development. Furthermore, a protection procedure from undesired attacks is un-
der study. Once those support and protection tools will be tested, the set-up will be
available also from outside the DSEA for all Wide Area Networks users.
146

References
1. S. Piccinocchi, M. Ceccarelli, F. Piloni, and A. Bicchi. Interactive benchmark for planning
algorithms on the web. In Proc. IEEE Int. Conf. on Robotics and Automation, volume 1, pages
399–404, 1997.
2. A. Bicchi, A. Coppelli, F. Quarto, L. Rizzo, F. Turchi, and A. Balestrino. Breaking the lab’s
walls: Tele-laboratories at the university of pisa. In Proc. IEEE Int. Conf. on Robotics and
Automation, volume 2, pages 1903–1908, 2001.
3. A. Bicchi, A. Caiti, L. Pallottino, and G. Tonietti. On-line robotic experiments for tele-
education at the university of pisa. International Journal of Robotic Systems, to appear 2004.
4. G. Tonietti and L. Pallottino 1) Manipulating Complex Remote Environments: Real-Time
Simulation Techniques for Haptic Interaction, 2) Where’s the lab? Robotic Tele-Labs: Past,
Present, and Future. 3rd EURON Symposium on Internet and Online Robots: Advanced Tech-
niques for Telemanipulation Benicassim, Spain, 15-19 September 2003.
5. Special Issue on Internet & Online Robots for Telemanipulation Applications, New Trends and
Advanced Techniques Ed. R. Marn, P. J. Sanz, K. Schilling, International Journal of Robotic
Research, to appear June 2004.
6. F. Giannini and F. Turchi. Strumenti per la programmazione remota di robot con tecnologia
java. Master’s thesis, University of Pisa, 1997.
7. F. Quarto. Implementazione hardware e software di un sistema di controllo digitale a distanza
tramite world-wide web e java. Master’s thesis, University of Pisa, 1998.
147
