
VISUAL HAND MOVEMENTS FOR MACHINE CONTROL
Sanjay Kumar, Dinesh Kant Kumar,Arun Sharma
School of Electrical and Computer Engineering RMIT University GPO Box 2476 Melbourne,VIC 3001,Australia
Keywords: Hand gestures classification, motion based representation, Computer Vision, K-NN method Mahalanobis
distance.
Abstract: A new technique for automated classification of human hand gestures for robotics and computer control
applications is presented. It uses view-based approach for representation, and statistical technique for
classification. This approach uses a cumulative image-difference technique where the time between the
sequences of images is implicitly captured in the representation of action. This results in the construction of
Temporal History Templates (THTs). These THT’s are used to compute the 7 Hu image moments that are
invariant to scale, rotation and translation. The recognition criterion is established using K-nearest neighbor
(K-NN) mahalanobis distance. The preliminary experiments show that such a system can classify human
hand gestures with a classification accuracy of 92%. Our research has been carried on in the robotics
framework. The overall goal of our research is to test for accuracy of the recognition of hand gestures using
this computationally inexpensive way of dimensionality-reduced representation of gestures for its suitability
for robotics
.
1 INTRODUCTION
Research in improving human-computer interaction
systems has resulted in the development of a variety
of systems that have applications in fields such as
virtual reality, telemedicine and computer games.
An important part of these systems is the input
module that is devoted to recognize the command by
the human operator.
Dynamic hand actions are the basis of hand
gestures and play a very important role in the
interactions between people. But the interaction of
people with computers is based static events such as
a key press. Information contained in the dynamic
gesture is lost and this reduces the scope of the
control of the machine. To improve human
interaction with computer machines and for robotics
applications, it is desirable for machines to extract
more information from human hand movement.
Systems reported in literature may be classified
into two broad categories; (i) Requiring the user to
wear or hold some device (ii) Using video data.
Most of the systems reported in literature are
invasive and require the use of gloves (Akita,1984 ,
Baudel, 1993), reflectors (N Ma,2001), or electrodes
(Poole,2002). In the recent past, video data based
non-invasive techniques to identify human activity
have been reported. Fong et al presented a virtual
joystick technique based on static gestures to drive
remote vehicle (Terence Fong and Charles
Baur,1996), in which hand motions are tracked with
a color and stereovision system. The system depends
on the static gesture and the interface is not user
friendly.
Baudel et al developed a system called
‘Charade’ to control remote objects using free-hand
gestures
(Lafon, July, 1996) . Using Charade, a
speaker giving a presentation can control remote
computer display with free-hand gestures while still
using gestures for communicating with audience.
The system has the problem of use of data glove and
accuracy of classification is a major concern.
Another technique reported uses an ‘elastic graph’, a
conductive sensor, to classify hand postures against
complex backgrounds in gray-scale images
(Jochen
Triesch and Christoph von der Malsburg, 2001). But
this technique is invasive and unable to cope with
are the large variations in the shape of hands
referring to the same posture.
Moy (Moy,1999) and Bretzner (Lars Bretzner
and Lenman) have proposed visual interpretation of
2D dynamic hand gestures in complex
environments. It is used for humans to communicate
215
Kumar S., Kumar D. and Sharma A. (2004).
VISUAL HAND MOVEMENTS FOR MACHINE CONTROL.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 215-220
DOI: 10.5220/0001147102150220
Copyright
c
SciTePress

and interact with a pet robot
(Moy, July 18-22 1999)
and control home appliances (Lars Bretzner and
Lenman,1997). But these techniques require hand
segmentation and feature extraction making the
system not transportable. The inability of the
techniques to reliably track the hand, and
dependency on the background lighting and gesture
positioning makes these unsuitable for HCI
applications.
Laptev et al used particle filtering and
hierarchy object models to track multi-state hand
models (Ivan Laptev and Tony Lindeberg,2001)
.But
the approach is very prone to variable background
conditions.
A complex, neural network based users and a
mobile robot
(Boehme, Sep. 17~19, 1997) interface
proposed by Triesch is based on 4 cue modules
sensitive to skin color, facial structure, structure of a
head-shoulder-contour and motion. But this system
lacks robustness to the environmental constraints.
An intuition based system to provide
naturalness suitable for two hands has been
developed by Caroline et al for computer supported
product design
(Caroline Hummels, Sep.
17~19,1997). This interface supports the perceptual-
motor skills and is task-specific.
The previous techniques for hand gesture
identification have been generally too intrusive,
unreliable, or computationally complex (Akita,1984
, Baudel, 1993) (Davis, April 1994) (Hinton, Jan
1993) (Sturman, Jan,1994). These methods are user
dependent and lack naturalness.
The present work is view-based approach for
the representation and classification of pre-defined
gestures using characteristics of the fine motion of
hand-gestures from particular view direction using
video data. The technique is based on the work of
Bobick and Davis (Davis, November 1998) (Aaron
F. Bobick, 2001) and the authors (Arun Sharma,
WITSP'2002) and uses of Temporal History
Template (THT). This research has combined the
use of THT with the image moment technique
proposed by Hu (Hu, 1962). The recognition
criterion is achieved by using K-NN nearest
neighbor technique using Mahalanobis distance. The
technique is computationally simple and results
demonstrate robustness.
2 THEORY
The technique presented in this paper is based on the
spatio-temporal templates of hand movements for
recognition. This “THT” is a single static image
integrated over time, is very distinctive for short
duration actions and is considered to be spatio-
temporal templates of hand movements. The motion
features of the THT are computed using geometrical
Hu moments and classified using Mahalanobis
statistical distance.
Videos of pre-defined hand actions of a group
of people are recorded. Temporal History Templates
corresponding to the different actions are generated
and stored in a database. From the THT of the
various hand gestures, global shape descriptors are
extracted corresponding to each hand movement.
Statistical distances are computed and used for
classification of the test recordings. During the
recognition phase, the hand gestures of the user are
recorded, THT generated and Hu moments
computed. The action is identified using K-NN (K-
Nearest Neighbor) classifier, “Mahalanobis
distance”. Details of each of these are described
below.
2.1 Temporal History Templates
This paper reports the use of statistical properties of
the geometric moments of THT to identify hand
movements. The representation of THT is a view-
based approach of hand action representation. The
technique is based on collapsing the hand motion
over time to generate a static image from the image
sequence. This resulting static image is
representative of the whole sequence of video
frames of the hand movement. Normalisation of the
image is been used to overcome the difference in
speed of the action. This technique is very suitable
for short duration, non-repetitive, medium velocity
movements making it suitable for real-time
computer interface application (Arun Sharma,
WITSP'2002.).
2.1.1 Motion Image Estimation
For this work a simple temporal difference of frame
technique (DOF) has been adopted (Aaron F.
Bobick, 2001). The approach of temporal
differencing makes use of pixel difference between
two or three consecutive frames in an image
sequence to extract motion information (Aaron F.
Bobick, 2001). The DOF technique subtracts the
pixel intensities from each subsequent frame in the
image sequence, thereby removing static elements in
the images. Based on research reported in literature,
it can be stated that the actions and messages can be
recognized by description of the appearance of
motion (Davis, November 1998) (Sanjay Kumar)
(Pentland, July 1997) (Starner, 1995) (Aaron F.
Bobick, 2001) (Arun Sharma, WITSP'2002.) (Sanjay
Kumar) without reference to underlying static
images, or a full geometric reconstruction of the
ICINCO 2004 - ROBOTICS AND AUTOMATION
216

moving hand (Little, November 1995). It can also be
argued that the static images produced using THT
based on the DOF represent features of temporally
localized motion (Davis, November 1998) (Aaron F.
Bobick, 2001) (Arun Sharma, WITSP'2002.) (Sanjay
Kumar 2001). This process can be represented
mathematically as follows
Let I (x, y, n) be an image sequence
&
DOF be D (x, y, n) = |I(x, y ,n) – I(x, y,n-1)|
Where I (x, y, n) is the intensity of each pixel at
location x, y in the n
th
frame
and D (x, y, n), is the
difference of consecutive frames representing
regions of motion.
B (x, y, n) is the binarisation of image
difference over a threshold of Γ
B (x, y, n)=
Γ)if D(x,y,n
otherwise
>
1
0
{
Putting a ramp multiplier to represent time
results in the THT. In a THT H
N
, pixel intensity is a
function of the temporal history of motion at that
point. The result is a scalar-valued image where
more recently moving pixels are brighter (Davis,
November 1998) (Aaron F. Bobick, 2001) (Arun
Sharma, WITSP'2002.) (Sanjay Kumar, 2002).
THT (H
N
(x, y))
=Max
U
1N
1n
B(x,y,n)*n
−
=
Where N represents the duration of the time
window used to capture the motion.
2.2 Feature Extraction
Hand gestures produce grey scale THT with global
features and with variations due to the rotation and
change in scale. Thus it is important to extract global
features of the static image that are scale, translation
and rotation invariant. Hu moments are invariant to
scale, rotation and translation are based on the
geometrical normalised centralised moments of the
image (Hu, 1962).
The definition of the zero-th order geometric
moment, m
00
, of the image f (x, y) is
m
00=
∑∑
==
N
x
M
y
yxf
11
),(
The two first order moments, {m
10
, m
01
}
identify the centre of mass (light intensity) of the
object. This defines a unique location that may be
used as a reference point to describe the position of
the object within the field of view. The coordinates
of the centre of mass can be defined through
moments as shown below
⎯ x
= m
10
⁄ m
00,⎯ y =
m
01
/m
00
According to uniqueness theory of moments
for a digital image of size (N, M) the (p+q)
th
order
moments m
pq
are calculated for p, q =0,1,2...
m
pq ≡ 1/ NM
∑∑
==
N
x
M
y
yxf
11
),(
x
p
y
q
The centralized moments,
µ
pq,
of the image
provides the translation invariance and can be
calculated as showed below:
µ
pq ≡ 1/NM
∑∑
==
N
x
M
y
yxf
11
),(
(x -⎯ x)
p
(y- ⎯y )
q
f (x , y) is intensity function of the gray scale
image.
2.2.1 Feature Classification
Based on the above, identification of the hand
gestures requires classification of the seven
dimensional Hu moments of the THT. This can be
achieved using statistical approaches or by artificial
neural networks. Among the supervised training
statistical approaches, Bayesian technique is most
common. But this requires assumption of
appropriate probability densities, which could be a
matter of concern for seven dimensional feature
VISUAL HAND MOVEMENTS FOR MACHINE CONTROL
217
space. The other technique is classification by
Hidden Markov Model (HMM). The main drawback
of HMM is its probabilistic approach and their
relatively modest discriminative power for
classification. Among the statistical technique, the
K-nearest neighbor (KNN) technique is commonly
used. Mahalanobis distance is an efficient measure
for KNN classification. The advantage of the
method is its computational simplicity.
2.3 Mahalanobis Distance
The MAHALANOBIS distance is a statistical
technique of determining the "similarity" of a set of
values from an "unknown” sample to a set of values
measured from a collection of "known" samples. It
is computed by the equation below:
2
r
≡ (f - k
x
)′ C
-1
(f - k
x
)
where r is the Mahalanobis distance from the
feature vector f to the mean vector k
x
, and C is the
covariance matrix for f.
3 METHOD
To test the technique, experiments were conducted
where five subjects were asked to make five pre-
defined hand gestures; the Move “Clasp” gesture
(MC), the Move “Right” gesture (MR), the Move
“Left” gesture (ML), Move “hold” gesture (MH) and
Move “Grab” gesture (MG) -Figure 1. Each hand
action was performed and recorded for duration of 3
second at frame rate of 30 frames/sec. The
movement was recorded using a video camera at a
distance of 1.2 meters from the hand and a with a
window size of 0.09 sq meters. The video data was
stored as true color (AVI files) with an array size of
120*160 for each frame. All the computing was
done using Image analysis package in Matlab 6.1.
These AVI files were transformed to eight-bit
gray scale images (0-255 levels). The duration of
the
movement
was determined from manually located
delimiters, and
this determined the number of
frames for each gesture and thus the duration of
integration of the DOF to generate the THT. To take
care of the variation in speed, the intensity image for
THT was normalized between [0…. 1] before
computing the image moments. From the THT
representation of each action 7-Hu moments were
computed. There are total 150 actions samples used
for classification purposes into five classes. The data
was divided into subsets of training data, validation,
and test subsets. One fourth of the data was used for
the validation set, one-fourth for the test set, and one
half for the training set. During the recognition the
user is asked to perform the test hand gesture, from
the test hand gesture THT is generated and features
are extracted to be compared with the pre-stored
features of the various THT’s using K-NN (K-
Nearest Neighbor) classifier, “Mahalanobis
distance”. The feature vectors whose Mahalanobis
distances are minimum are classified as the members
of the class.
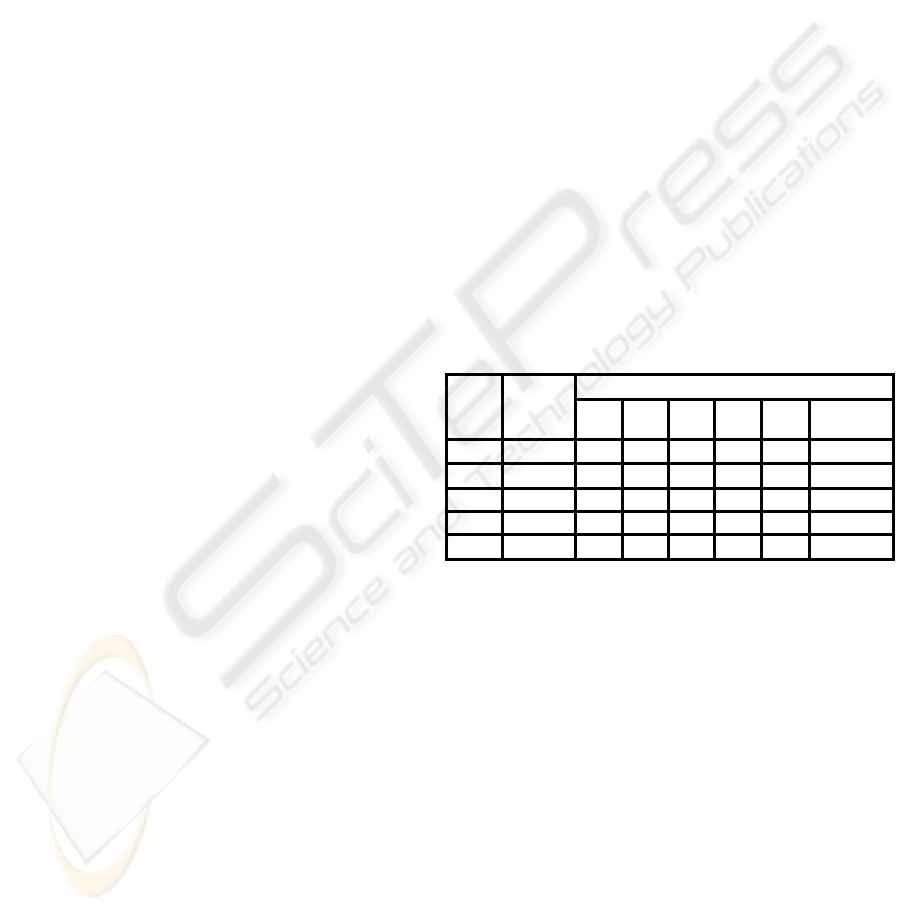
4 RESULTS AND DISCUSSION
The results of the testing show that with the system
described can classify the five gesture classes with
92 % accuracy (Table 1). This accuracy can be
attributed to the invariance to variations such as
rotation, scale and translation of Hu Moments, and
also due to the better
discriminating ability of DOF
technique.
Reasons for inaccuracy in discrimination
can be attributed to the image differencing technique
being sensitive to pixels revisited while performing
the hand action.
Table 1 shows the results of classification
5 CONCLUSIONS
This paper reports the testing of a new technique for
identifying hand actions using video data using Hu-
moments of the THT as features and with K-NN
nearest neighbor for classification. Temporal
integration of the video sequences of the hand
movements removes the static content from the
video sequences to generate THTs of the hand
movement. Experiments suggest that THTs of
different classes present distinctive 2-D motion
patterns where each pixel describes the function of
temporal history of motion in that sequence. The
scale, translation and rotation invariant features have
been used for discrimination of the THT for
classification. On the basis of the experimental
results it can be concluded that the THT based
Predicted Membership of Classes Class No of
Actions
MC MR ML MH MG Accuracy
(%)
MC 30 27 - 1 - 1 90 %
MR 30 1 29 1 - - 97 %
ML 30 - 1 26 2 - 87 %
MH 30 2 - 1 28 1 94 %
MG 30 - - 1 - 28 93 %
ICINCO 2004 - ROBOTICS AND AUTOMATION
218

method can be successfully used for computer
interaction and for controlling robots. The system is
fast and accurate when compared to other attempts
for machine based hand movement gesture
recognition. In the current form, the limitation of the
method is its suitability to short duration hand
movements only. The next step is to test the
accuracy on large database, long duration
movements and the sensitivity analysis of the
method. Future work also investigates the effect of
noise on the classification accuracy.
REFERENCES
Aaron F. Bobick, J. W. D. (2001) The Recognition Of
Human Movements Using Temporal Templates. IEEE
- Pattern Analysis and Machine Intelligence, 23 No 3,
257-267.
Akita, K. Pattern recognition, 1984, Image sequence
analysis of real world human motion. 17 (No.1), 73-
83.
Arun Sharma, D. K. K., Sanjay Kumar, Neil McLachalan
(WITSP'2002.). Representation and Classification of
Human Movement Using Temporal Templates and
Statistical Measure of Similarity Workshop On
Internet Telecommunications and Signal Processing.
2002. Wollongong, Sydney Australia.
Baudel, T., Beaudouin-Lafon, M (1993) Charade: remote
control of objects using free hand gestures CACM,
1993, 28 -35.
Boehme, H.-J. (Sep. 17~19, 1997) International Gesture
workshop Bielefeld, Germany, 2 Neural Architecture
for Gesture-based Human-Machine-Interaction”.
13~232.
Caroline Hummels, G. S., and Kees Overbeeke (Sep.
17~19,1997) An Intuitive two-hands gestural interface
for computer support product design International
Gesture workshop Bielefeld, Germany, 197~208.
Davis, J. a. A. B. (November 1998) Virtual PAT: a virtual
personal aerobics trainer Proc. Perceptual User
Interfaces.
Davis, J. S., M (April 1994) Visual gesture recognition.
Vision, Image and Signal Processing IEE Proceedings
Vision, Image and Signal Processing IEE
Proceedings,, 141(Issue: 2), 101 -106.
Hinton, S. S. F. a. G. E. (Jan 1993) "Glove-talk: a neural
network interface between a data-glove and a speech
synthesizer IEEE Trans. on Neural Networks,, vol-4,
2--8.
Hu (1962) Visual Pattern Recognition By Moment
Invariants IEEE - Pattern Transaction On Information
Theory, 8(2), 179-187.
Ivan Laptev and Tony Lindeberg (2001). Jochen Triesch
and Christoph von der Malsburg. Tracking of
multistage hand models using particle filtering and a
hierarchy of multi-scale image feature
Lafon, T. B. a. M. B. (July, 1996) Remote control of
objects using free-hand gestures”,. Communications of
ACM Communications of ACM, 3, 36(7), 28~35.
Lars Bretzner, I. L., Tiny Lindeberg, Soren and Lenman,
a. Y. S. (Jan 1997) A prototype system for computer
vision based human computer interaction Proc of the
workshop on imaging and neural networks Little, J.,
and J. Boyd (November 1995) Describing motion for
recognition International Symposium on Computer
Vision,, 235-240.
Moy, M. C. (July 18-22 1999) Gesture-based Interaction
with a Pet Robot Proceedings of 6th National
Conference on Artificial Intelligence and 11th
Conference on Innovative Applications of Artificial
Intelligence Orlando, Florida, USA, 628-633.
N Ma, D. K. K., N D Pah ANZIIS 2001 Classification of
Hand Direction using Multi-Channel
Electromyography by Neural Networks PR106.
Pentland, I. E. a. A. (July 1997) Coding, Analysis,
Interpretation, and Recognition of Facial Expressions
IEEE Trans. Pattern Analysis and Machine
Intelligence, 19, no. 7, 757-763.
Poole, E. D. K. K. IEEE EMBS 2002, Classification of
EOG for Human Computer Interface USA.
Sanjay Kumar, A. S., Dinesh Kant Kumar, Neil
McLachlan (2002) Classification of Visual Hand
Gestures Using Difference of Frames Proc. of the Int.
Conf. on Imaging Science and Technology, Las
Vegas, Nevada, USA , CISST'02. 2002. Las Vegas,
USA: (CSREA Press, 2002).
Starner, T. P., A. (1995) Visual Recognition of American
Sign Language Using Hidden Markov Models Proc.
Intl Workshop on Automated Face and Gesture
Recognition Zurich, 1995.
Sturman, D. J. Z., D (Jan, 1994) A survey of glove-based
input ".14 (Issue: 1), 30-39.
Terence Fong, F. C., (June 1996) Sebastien Grange, and
Charles Baur Novel interfaces for remote driving:
gesture, haptic and PDA”, 11
th
IEEE conference on
Image Analysis
VISUAL HAND MOVEMENTS FOR MACHINE CONTROL
219
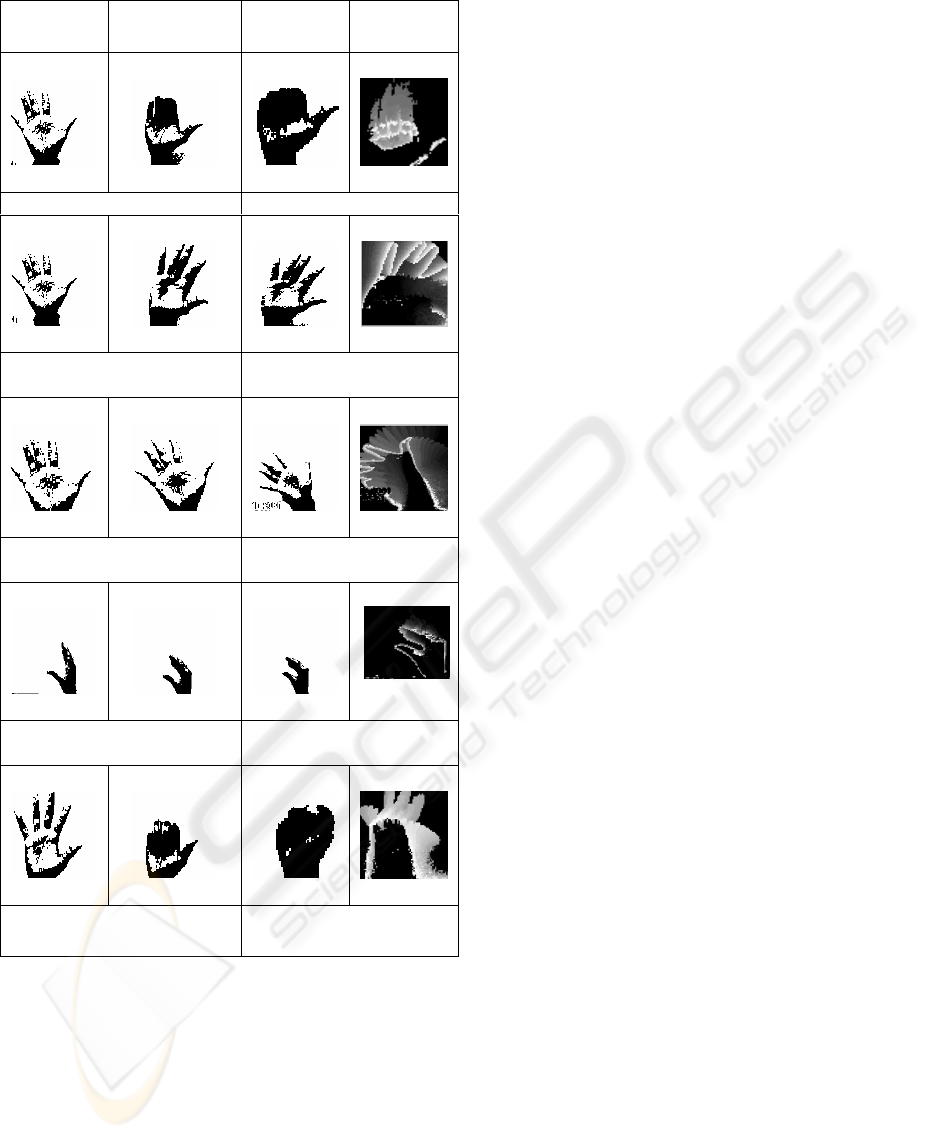
Figure 1: Visual Hand Movement Sequences and THTs
First
Frame
Intermediate
Frame
End
Frame
THT
Move “CLASP” Move “CLASP”
Move “Right” Move Identifier
“RIGHT”
Move “LEFT” Move Identifier”
LEFT”
Move “HOLD” Move Identifier “
HOLD”
Move “GRAB” Move Identifier”
GRAB”
ICINCO 2004 - ROBOTICS AND AUTOMATION
220
