
Multi-MNO Predictive-QoS for Vehicular Applications
Prachi Mittal and Tim Leinm
¨
uller
Denso Automotive Deutschland GmbH, Germany
Keywords:
Connected Vehicles, Predictive Quality of Service, Seamless Mobility, Multiple Mobile Network Operators.
Abstract:
There are more and more ‘connected’ vehicles on the streets, and they run increasingly more safety critical
applications. To meet the connectivity requirements of these vehicles, network providers need to not only
ensure the quality of service (QoS) but also to predict any upcoming changes in the QoS and inform the
vehicle(s) about it. This concept is called predictive-QoS (P-QoS) and is being heavily discussed in various
organizations, e.g. 3GPP, 5GAA.
To allow a seamless service to vehicles, some issues such as handling multiple mobile network operators
(MNOs), while roaming for example, need to be addressed. For example, if prediction about QoS is available
for multiple MNOs simultaneously for a specific area, this could be beneficial for the vehicle in selecting an
MNO for further operation in specific scenarios, e.g. roaming, driving through an area where the current MNO
is predictive to have poor QoS.
In this paper, we introduce an entity, that takes the QoS prediction about multiple MNOs and makes decision
about how to manage the connectivity in a vehicle, e.g. selecting a set of MNOs for further connectivity
including a preference for each, making an “MNO usage timeplan” based on the QoS comparison etc.
1 INTRODUCTION
Connectivity is becoming increasingly important for
automotive applications that serve many functions in
vehicles such as infotainment, safety, automation etc.
The number of vehicles that rely on connectivity is
on a constant rise. Therefore, the reliability as well
as predictability of the whole connectivity ecosystem,
especially the communication technology itself, is a
major consideration for vehicle manufacturers. That
is why, the automotive and telecommunications in-
dustry have been placing emphasis on increasing the
reliability and coverage of the connectivity and addi-
tionally, on predicting any upcoming degradations or
changes to better prepare the vehicles as well as the
entire system.
Communication in vehicles comes in many forms.
This includes the traditional cellular mobile con-
nectivity utilizing 3GPP (3rd Generation Partnership
Project) technologies 2G, 3G and 4G LTE. During the
past decade, vehicles now also include direct connec-
tivity, known as vehicle-to-everything (V2X) which
enables them to communicate with other road partici-
pants (other vehicles, pedestrians etc).
For cellular mobile connectivity, prediction of the
‘quality of service’ (P-QoS) has been an active topic
of research and discussions for past several years,
in the context of 5G and beyond technologies. It
is addressed in public-funded research projects in
EU, such as 5G-NetMobil (Hofmann et al., 2019)
and 5G-CroCo (Hetzer et al., 2019), as well as in
organizations like 5GAA (5G Automotive Associa-
tion) (5GAA, 2020) and 3GPP (3GPP, 2019d; 3GPP,
2019c; 3GPP, 2019a; 3GPP, 2019b).
Typically, a mobile network operator (MNO) has
all control over which services are provided to a net-
work user and how are they provisioned. The roam-
ing scenarios, i.e. when a user of MNO1 is being
served by MNO2, are well defined in terms of techni-
cal (how is the connectivity handled technically in the
respective networks) and business solutions (roaming
charges, if any). But for vehicular network users,
the roaming scenarios are not easily implemented.
Firstly, the movement between the coverage areas of
different MNOs is fast and frequent, and secondly, the
applications can be highly demanding (e.g. in terms of
network resources) or even safety critical.
In this paper, we focus on the problem of manag-
ing P-QoS in an multi-MNO environment. We intro-
duce a novel multi-MNO approach to P-QoS provi-
sion that utilizes QoS predictions about multiple cel-
lular mobile networks (managed by different MNOs)
at the same time. The approach makes decision about
how to manage the connectivity in a vehicle, e.g. se-
Mittal, P. and Leinmüller, T.
Multi-MNO Predictive-QoS for Vehicular Applications.
DOI: 10.5220/0010525606930697
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 693-697
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
693

lecting a set of MNOs for further connectivity includ-
ing a preference for each, making an “MNO usage
timeplan” based on the QoS comparison etc. This ap-
proach puts the vehicle’s interest at the centre of the
P-QoS provision. Apart from the general problems
of multi-MNO scenarios stated above, providing P-
QoS can be especially tricky. This is because it ad-
ditionally requires knowledge of the cellular network
performance and the capability of making predictions
of high reliability. While one MNO may be capable
enough to assess its own network and make predic-
tions about the QoS, it may not be fit to do the same
for networks operated by other MNOs.
The remainder of this paper is organized as fol-
lowed. In the next section, we briefly discuss related
work. We introduce our Multi-MNO P-QoS approach
in Section 3, followed by a discussion of advantages
and issues in Section 4. Finally, we present conclu-
sions and an outlook to future work in Section 5.
2 RELATED WORK
The P-QoS research has focused on many different
aspects of P-QoS.
Making prediction for end-user mobility is one
approach that can be taken to managing and/or pre-
dicting connectivity (and subsequently QoS) require-
ments for a mobile network. The authors of (Fazio
et al., 2017) demonstrate how this mobility predic-
tion can be used for in-advance bandwidth reserva-
tions in order to achieve service continuity, avoiding
call droppings during active sessions. In a similar vein
of work (Abdalla and Ariffin, 2019), Abdalla et al.
discuss a scheme to make more accurate predictions
for end-user mobility and corresponding future cell.
Both works lay the groundwork for one of the most
important elements of P-QoS, namely prediction of
mobility and thus connectivity of an end-user.
The authors of (Hofmann et al., 2019) evaluated
QoS adaptation for platooning scenario. They re-
ported improved planning towards an optimum effi-
ciency for the platooning application in trucks when
they are informed, in advance, of the possible upcom-
ing changes in end-to-end latency and packet delivery
rate.
In (Hincapie. et al., 2019), the authors focused on
the software implementation of P-QoS in a vehicle.
They introduced a collaborative and distributed QoS
manager in the vehicle that seeks to increase and di-
versify the sources of information for P-QoS parame-
ters and the selection of further configuration settings
for the vehicular connectivity.
Torres-Figueroa et al. apply various machine
learning mechanisms to recorded data sets of mul-
tiple MNOs for generating respective QoS predic-
tions (Torres-Figueroa et al., 2020). They deem the
prediction results to not be sufficient for highly reli-
able safety-critical and propose a combined network-
and user-based P-QoS prediction to achieve more re-
liable predictions.
Closest to the scope of our paper is the research
done within the 5G-CroCo project where the re-
searchers defined multiple deployment options for a
P-QoS service (5G-CroCo, 2021). This approach al-
lows the vehicle navigate a multi-MNO environment
but in each deployment option, the vehicle is, in ef-
fect, served by a single MNO at a time.
To the best of our knowledge, no research has been
done on the specific scenario of managing P-QoS for
multiple MNOs at the same time by a single entity in
order to cherry-pick the best available QoS for a user.
3 MULTI-MNO P-QoS
MANAGEMENT
3.1 Multi-MNO Environment
In a typical connected vehicle scenario, there a num-
ber of vehicles on the roads that have network con-
nectivity provided by a set of MNOs. Different MNO
networks have different capabilities, coverage, data-
traffic at any given time, and different roaming and
service-level agreements (SLAs) with other MNOs.
A multi-MNO environment, such as the one de-
picted in Figure 1, presents a number of challenges
when a connected vehicle is to be served. One such
challenge is to provide a service that runs seamlessly
across network coverage boundaries. This is espe-
cially difficult to achieve for users with high mobil-
ity, such as vehicles traveling at a highway. The dif-
ficulty of this challenge is further escalated when the
road segment traveled by the said vehicle crosses over
national boundaries and thus requiring not only inter-
MNO SLAs but also international agreements and/or
requirements.
Through the network connectivity, the vehicles are
not only connected to the serving MNO but also to
other entities in the cloud, e.g. OEM backend, third
party service providers. It is this connectivity that we
intend to leverage for the idea presented in this paper,
through a so-called ”Communication Decision Entity
(CDE)”.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
694
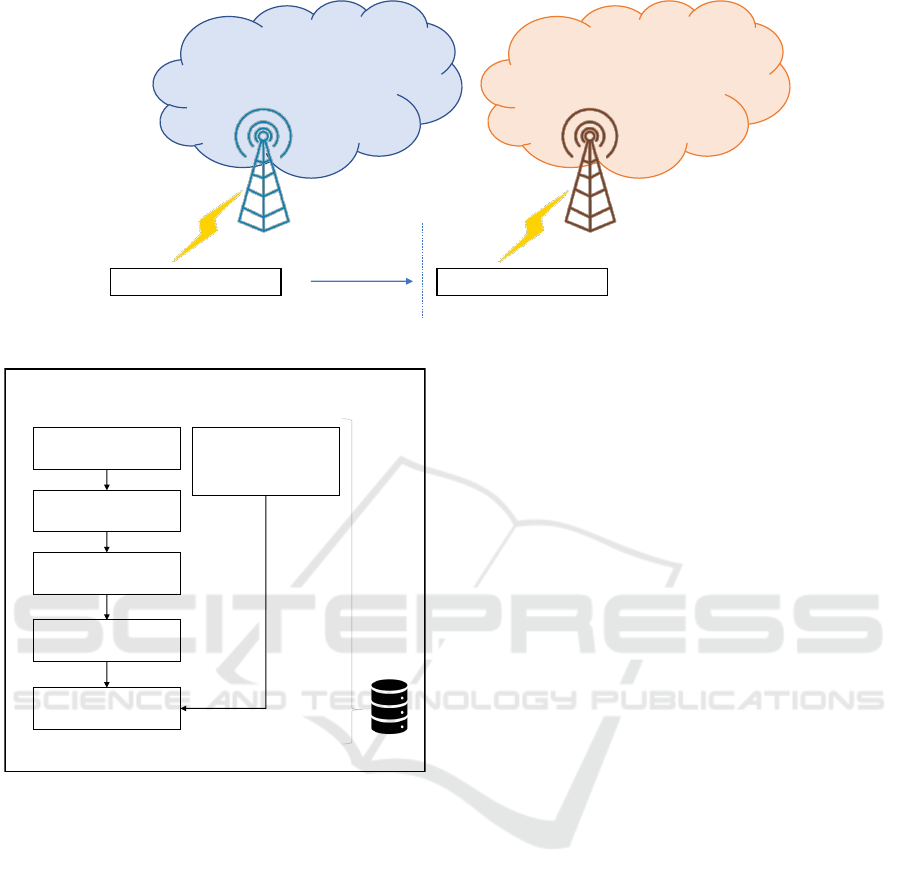
MNO1
Traffic Participant
Mobility
MNO2
Traffic Participant
Coverage / National
Boundary
Figure 1: Typical Inter-MNO Mobility Scenario.
Communication Decision Entity (CDE)
Storage
Multi-MNO P-QoS
Data Collection
Common Data
Formatting
Data Analysis
MNO Performance
Comparison
Connectivity
Decision
Vehicle Application
Requirements Data
Collection
Figure 2: Functions of Communication Decision Entity.
3.2 Communication Decision Entity
(CDE)
The “Communication decision entity (CDE)” acts as
aggregator of P-QoS related information from multi-
ple MNOs. It then analyzes the P-QoS data to make
decisions about the network connectivity for a vehicle
or a whole fleet of vehicles.
3.2.1 CDE Functions
The CDE accomplishes its objectives by performing
following functions (shown in Figure 2) –
• Collect P-QoS data about multiple MNOs (multi-
ple embodiments are possible as described later):
this data includes the current provided QoS of
each MNO and any predictions about it, e.g. pre-
dicted degradation in the bandwidth in a specific
timeslot due to a network maintenance event
• Obtain application requirements of the vehicle:
these requirements can be expressed in terms of
bandwidth, (tolerable) latency, reliability etc
• Bring the prediction data of multiple MNOs into
a common format, if required
• Gather insights about connectivity both spatial
and temporal, e.g. the expected QoS in a certain
geographic area in a certain time-period (say 5 to
6 o’clock in the evening on a weekday) is below
the requirements of a safety application running
on a vehicle
• Consider which parameters to compare and pro-
duce a quantitative output from the comparison.
The parameters are chosen based on applica-
tion(s) requirements in a vehicle. An example
parameter for comparison can be latency and the
quantitative output can be an index, e.g. a 0.8
and 1.1 for MNO1 and MNO2 respectively could
mean that the MNO1 provides a latency of 0.8
times the latency required by the application and
MNO2 provides 1.1 times the latency.
• Make decision about further connectivity, e.g.
– Which MNO to select when roaming to make
sure that an application can continue to run in a
vehicle even when the parent MNO is not avail-
able any more (hence the roaming on another
MNO)
– Which MNO to select when current MNO’s
performance falls below a certain threshold
– A timeplan of usage such as use MNO1 for
the next 10 minutes and then switch to MNO2.
This is to (1) ensure seamless execution of an
application in a vehicle, (2) ensure an efficient
usage of MNO resources, and (3) possibly keep
the cost to a minimum (due to roaming agree-
ments and corresponding charges)
Multi-MNO Predictive-QoS for Vehicular Applications
695

3.2.2 CDE Configurations
The CDE can reside in the backend (e.g. a third party
service provider or an MNO’s core network) or in the
vehicle itself. Each approach comes with its own set
of advantages.
• Backend-based CDE: can make decisions tailored
to one vehicle but also for an entire fleet (e.g. an
OEM-backend-based CDE making decisions for
all connected vehicles of the said OEM).
• Vehicle-based CDE: offers an advantage of more
efficient decisions that are highly tailored to that
vehicle and has an additional advantage of making
decisions even when there is no connectivity (e.g.
based on historical data).
Furthermore, multiple configurations for the CDE
are envisioned.
• Configuration 1 (Figure 3): the CDE collects the
QoS prediction data directly from MNOs.
• Configuration 2 (Figure 4): the CDE collects the
data from a 3rd party server which in turn collects
it from the MNOs.
• Configuration 3 (Figure 5): the CDE collects the
data from an MNO which provides not only its
own data but also the data about other MNOs.
Each configuration offers a set of advantages and
disadvantages. For instance, in configuration 1 and 2,
the MNOs provide P-QoS data about their respective
networks to a third party entity (that they trust). This
frees them for performing vehicle related.
3.2.3 CDE Working Example
The following example illustrates functioning of the
CDE as proposed in this paper. A vehicle is driv-
ing automated while the CDE (in the vehicle or in
the backend) receives a prediction about decline in
the QoS of the primary mobile network (let’s call it
MNO1). Based on the predicted QoS of other mo-
bile networks (let’s call them MNO2, MNO3, . . . ),
the CDE determines that based on the connectivity re-
quirements of the automation application running on
the vehicle, it is better to switch to MNO3 after a cer-
tain period of time (say 5 minutes) and then remain
on MNO3 for 15 minutes before switching back to
MNO1.
4 DISCUSSION
The multi-MNO P-QoS management we proposed in
this paper offer multiple advantages. Firstly, the ve-
hicle gets the best service possible based on QoS
MNO 1
MNO 2
…
MNO x
Connectivity Decision
Entity (CDE)
Vehicle
Figure 3: CDE Configuration 1.
QoS Server (3
rd
Party)
MNO 1
MNO 2
…
MNO x
Connectivity Decision
Entity (CDE)
Vehicle
Figure 4: CDE Configuration 2.
MNO1
MNO 2
MNO 3
…
MNO x
Connectivity Decision
Entity (CDE)
Vehicle
Figure 5: CDE Configuration 3.
prediction data of multiple MNOs operating in its
range. This is highly beneficial and even necessary
for safety-critical and/or high-demanding (in terms of
communication network resource usage) applications
such as remote driving. Secondly, there is a natural
’load-balancing’ among multiple MNOs, i.e. instead
of a large number of vehicles overloading one MNO
(e.g. either because they are all contractees of the said
MNO or because the said MNO has SLAs with their
original MNO(s)), the vehicles choose or are assigned
the best possible service at any given time. Thirdly,
connectivity decision can be made not only one single
vehicle but for a whole fleet of vehicles. This is espe-
cially useful if CDE is operated by a vehicle OEM or
a fleet owner such as a logistics company.
The advantages are of course not without their dis-
advantages. There are many roadblocks for the pro-
posed approach. From a technical point of view, the
very first demerit is having to process a much larger
amount of data, which in turn may have been for-
matted differently (e.g. formulated using different
KPIs) by different MNOs. Secondly, the proposed
approach may increase the frequency of handovers.
This not only means more complex roaming agree-
ments among the MNOs but also the additional over-
heads in terms of amount of control data and the more
frequent periods of service outage (if any). Concern-
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
696

ing the business aspects of this approach, for example,
the MNOs need to share their QoS prediction data ei-
ther to each other or to a third party. Additionally,
an MNO might not be forthcoming with our proposed
idea due to data trust or privacy concerns. Even if this
could be resolved by SLAs or similar, the agreements
might be quite complicated, and so will be the service
tariffs and business models.
5 CONCLUSIONS
Making predictions about the performance and hence
the available QoS for a cellular mobile network is a
challenging task because a network serves thousands
of users at a time and the users have varying mobil-
ity and network usage. This task becomes even more
complex if one tries to make similar predictions about
a multitude of such networks because each network
has its own characteristics (e.g. capacity, topology,
maintenance schedule, roaming agreements) as well
as its own set of users. Thus, providing predictive-
QoS in a multi-MNO environment is very challeng-
ing.
In this paper, we propose a novel approach for
multi-MNO P-QoS management that focuses on pro-
viding a vehicle with best possible QoS from mul-
tiple MNOs operating within vehicle’s range. This
approach also ensures a more uniform data-traffic
load distribution among the MNO networks. This
is achieved by introducing a dedicated ’Communica-
tion Decision Entity’ (CDE) for a vehicle or fleet of
vehicles that collects QoS relevant data for multiple
MNOs and makes the connectivity decisions for the
vehicle(s). On one hand, this approach acts in the
best interest of the vehicle(s), on the other hand, it
can alleviate over-loading problems for the involved
MNOs. We envision multiple configurations for CDE
to suit different network configurations or business
paradigms.
In future, we plan to provide simulation-based ev-
idence for this approach. We also intend to work
on analyzing the challenges of adopting such an ap-
proach in real-life environment.
REFERENCES
3GPP (2019a). TR 23.287, V16.0.0 (2019-09): Architec-
ture enhancements for 5G System to support Vehicle
to-Everything (V2X) services.
3GPP (2019b). TR 23.288, V16.1.0 (2019-09): Architec-
ture enhancements for 5G System to support network
data analytics service.
3GPP (2019c). TR 23.786, V16.1.0 (2019-06): Study on
architecture enhancements for 3GPP support of ad-
vanced V2X services.
3GPP (2019d). TS 22.186, V16.2.0 (2019-06): Service re-
quirements for enhanced V2X scenarios.
5G-CroCo (2021). Deliverable D3.2 - Intermediate E2E,
MEC and Positioning Architecture. Technical report,
5G-CroCo.
5GAA (2020). 5GAA White paper: Making 5G Proactive
and Predictive for the Automotive Industry. Accessed:
2021-02-04.
Abdalla, S. E. and Ariffin, S. H. S. (2019). The inte-
grated history based prediction for future networks. In
2019 International Conference on Computer, Control,
Electrical, and Electronics Engineering (ICCCEEE),
pages 1–5.
Fazio, P., De Rango, F., and Tropea, M. (2017). Pre-
diction and qos enhancement in new generation cel-
lular networks with mobile hosts: A survey on dif-
ferent protocols and conventional/unconventional ap-
proaches. IEEE Communications Surveys Tutorials,
19(3):1822–1841.
Hetzer, D., Muehleisen, M., Kousaridas, A., and Alonso-
Zarate, J. (2019). 5G Connected and Automated Driv-
ing: Use Cases and Technologies in Cross-border En-
vironments. In Proceedings of European Conference
on Networks and Communications (EuCNC), pages
78–82.
Hincapie., D., Saad., A., and Jiru., J. (2019). Collabora-
tive and Distributed QoS Monitoring and Prediction:
A Heterogeneous Link Layer Concept towards always
Resilient V2X Communication. In Proceedings of the
5th International Conference on Vehicle Technology
and Intelligent Transport Systems - Volume 1: VE-
HITS,, pages 601–608. INSTICC, SciTePress.
Hofmann, F., Mahdi, A. H., Brahmi, N., Wegmann, B.,
Muehleisen, M., Petry, F., Mudriievskyi, S., El As-
saad, A., Jornod, G., Franchi, N., and Fettweis, G.
(2019). 5G NetMobil: Pathways Towards Tactile Con-
nected Driving. In Proceedings of 2nd IEEE 5G World
Forum (5GWF), pages 114–119.
Torres-Figueroa, L., Schepker, H. F., and Jiru, J. (2020).
QoS Evaluation and Prediction for C-V2X Commu-
nication in Commercially-Deployed LTE and Mobile
Edge Networks. In Proceedings of 91st IEEE Vehicu-
lar Technology Conference, VTC2020-Spring.
Multi-MNO Predictive-QoS for Vehicular Applications
697
