
Gesture Recognition for UAV-based Rescue Operation based on Deep
Learning
Chang Liu
1 a
and Tam
´
as Szir
´
anyi
1, 2 b
1
Department of Networked Systems and Services, Budapest University of Technology and Economics,
BME Informatika
´
ep
¨
ulet Magyar tud
´
osok k
¨
or
´
utja 2, Budapest, Hungary
2
Machine Perception Research Laboratory of Institute for Computer Science and Control (SZTAKI), H-1111 Budapest,
Kende u. 13-17, Hungary
Keywords:
UAV Rescue, Human Gesture Recognition, UAV-human Communication, OpenPose, Neural Networks, Deep
Learning.
Abstract:
UAVs play an important role in different application fields, especially in rescue. To achieve good communi-
cation between the onboard UAV and humans, an approach to accurately recognize various body gestures in
the wild environment by using deep learning algorithms is presented in this work. The system can not only
recognize human rescue gestures but also detect people, track people, and count the number of humans. A
dataset of ten basic rescue gestures (i.e. Kick, Punch, Squat, Stand, Attention, Cancel, Walk, Sit, Direction,
and PhoneCall) has been created by a UAV’s camera. From the perspective of UAV rescue, the feedback from
the user is very important. The two most important dynamic rescue gestures are the novel dynamic Attention
and Cancel which represent the set and reset functions respectively. The system shows a warning help message
when the user is waving to the UAV. The user can also cancel the communication at any time by showing the
drone the body rescue gesture that indicates the cancellation according to their needs. This work has laid the
groundwork for the next rescue routes that the UAV will design based on user feedback. The system achieves
99.47% accuracy on training data and 99.09% accuracy on testing data by using the deep learning method.
1 INTRODUCTION
Gesture recognition is a popular research topic in the
field of computer vision and machine learning, and
it has been widely associated with intelligent surveil-
lance and human-computer interaction. Unmanned
aerial vehicles (UAVs) are becoming increasingly
popular for many commercial applications, such as
photogrammetry (Gonc¸alves and Henriques, 2015),
agriculture (Barbedo, 2019), measuring park-based
physical activity (Park and Ewing, 2017), and search
and rescue (Erdelj et al., 2017) (Peschel and Mur-
phy, 2013). Nowadays, with the development of com-
puter vision technology and drone technology, in-
creasingly researchers have made numerous signif-
icant research comes about in these two intersect-
ing areas. Such as UAV hand gesture control (Ma
et al., 2017)(Li and Christensen, ), UAV for pedes-
trian detection (De Smedt et al., 2015), UAV gesture
recognition (Perera et al., 2018)(Hu and Wang, 2018).
a
https://orcid.org/0000-0001-6610-5348
b
https://orcid.org/0000-0003-2989-0214
UAV has the ability to overcome the problem of fixed
coverage and it also can reach difficult access areas.
Therefore, it will provide awesome offer assistance to
human beings in rescue.
Within these areas of research, a number of datasets
have been published over the past few years. These
datasets cover a wide range of research disciplines,
but mainly relate to the security, industrial and agri-
cultural domains. From the perspective of human de-
tection and action recognition datasets, there are some
open source datasets collected by drones, such as,
datasets for object detection (Xia et al., 2019), object
tracking (Carletti et al., 2018), human action detection
(Barekatain et al., 2017), and hand gesture recogni-
tion (Natarajan et al., 2018). Moreover, a dataset for
UAV control and gesture recognition (Perera et al.,
2018) and an outdoor recorded drone video dataset
for action recognition (Perera et al., 2019). But so
far there is no suitable dataset to describe some of the
gestures of human beings in difficult situations, es-
pecially in wild disasters. In this work, we propose
a novel dataset to describe some of the body gesture
180
Liu, C. and Szirányi, T.
Gesture Recognition for UAV-based Rescue Operation based on Deep Learning.
DOI: 10.5220/0010522001800187
In Proceedings of the International Conference on Image Processing and Vision Engineering (IMPROVE 2021), pages 180-187
ISBN: 978-989-758-511-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
responses that humans will make in the wildness en-
vironment.
The drones can also use speech in wild rescue, but
this is more dependent on the environment, especially
in the wild, and if the drones use speech recognition
for rescue then there is no way to avoid some of the
noise caused by the external environment, which can
affect the rescue. If speech is possible between the
UAV board and humans on the ground against the
noisy (e.g., rotor noise) environment, the used lan-
guage and the possible rich dictionary of problem
featuring makes it impossible to understand humans
come up with the problem. While a limited and well-
oriented dictionary of gestures can force humans to
communicate briefly. So gesture recognition is a good
way to avoid some communication drawbacks, but
of course in our rescue gestures, we need to select
the most representative gestures according to differ-
ent cultural backgrounds.
In drone rescues, communication between users and
drones is a very important factor. Therefore, it is nec-
essary to add corresponding feedback in the process
of recognizing rescue gestures. In this work, based
on the 10 basic body rescue gestures created in this
paper, we have chosen a pair of dynamic gestures:
a two-handed waving motion (Attention) and a one-
handed waving motion (Cancel) as the two most basic
communication vocabularies, well separated from the
static gesture patterns. When a human stretches out
two arms to call the drone, the drone will issue a warn-
ing and enter the help mode. When the human only
stretches out one arm, it means that the user wants to
cancel the communication with the drone. In other
words, the user does not need any help, the system
will shut down. The gestures dynamic Cancel and At-
tention are highlighted here as they are seen as setting
and resetting functions respectively, for people who
do not want to interact with the drone (e.g., standing
people), then communication between the drone and
the user will not be established and no warning mes-
sages will appear.
In the next few sections, Section 2 presents related
work, including machine specifications and UAV con-
nectivity. In Section 3, the gesture data collection
strategies and the related methodology are presented,
followed by human detection, pose extraction, human
tracking and counting, and body rescue gesture recog-
nition, along with a description of the relevant models
and training and system information. Finally, Section
4 discusses the training results of the models and the
experimental results. Conclusions and future work
are drawn in Section 5.
2 BACKGROUND
Based on experiments conducted by Sabir Hossain on
different GPU systems(Hossain and Lee, 2019), we
chose to embed the Jetson Xavier GPU into the drone,
which was used for real-world applications.The real
implementation of this work is done by using an on-
board UAV with a Jetson Xavier GPU in the field
where we have no network to rely on. During the
experiment we were unable to go out into the field
to fly the drone for some external reason, so we sim-
ulated the field environment in the lab and changed
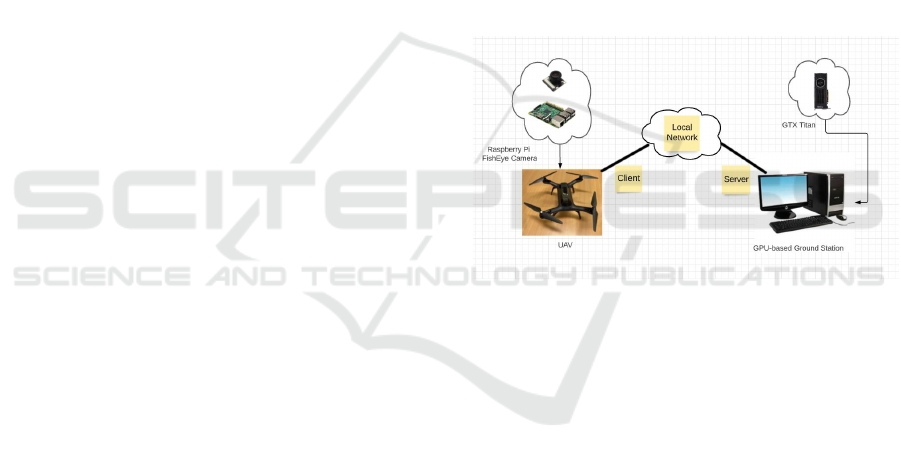
the system for the test section, as shown in Figure
1. The lab tests were done on a 3DR SOLO UAV
based on a Raspberry Pi system that relied on a desk-
top ground station with a GTX Titan GPU. The drone
communicates with the computer via a local network.
In Chapter 4 we also tested the real running time of
the system.
Figure 1: Testing of a Raspberry Pi system UAV with GPU-
based ground station for rescue.
The ground station computer is equipped with an
NVIDIA GeForce GTX Titan GPU and an Intel(R)
Core (TM) I7-5930k CPU, which used for system
testing. The UAV is a raspberry pi drone, which is
a single-board computer with a camera module and
BCM2835 CPU. The type of camera is a 1080P 5MP
160
◦
fish eye surveillance camera module for Rasp-
berry Pi with IR night vision. The resolution of the
drone camera is set 1280*960 for the gesture recogni-
tion. In the test, the drone was flown in the laboratory
at a height of about 3 metres. When we increase the
resolution, the altitude at which the drone can fly in-
creases accordingly. The higher the resolution of the
drone camera, the higher the altitude the drone can
fly over. The system can therefore also work properly
at altitudes of more than ten metres using the high-
resolution sensors of the drone camera. The system
works well when the drone is flying diagonally above
the user, as the drone can detect the entire body in this
recognition.
Gesture Recognition for UAV-based Rescue Operation based on Deep Learning
181

3 METHODOLOGY
The framework of our proposed system is based on
gesture recognition for UAV and human communica-
tion. In this section, data collection, human detec-
tion, counting, and tracking are presented. The whole
gesture recognition system with calling and cancel-
ing feedback is explained. Figure 2 shows the frame-
work of the whole system. First, we perform pose es-
timation, followed by human tracking and counting.
Next comes the all-important rescue gesture recogni-
tion.Feedback from the human body is essential for
UAV gesture recognition systems. Obtaining infor-
mation about gestures without feedback will not help
to improve autonomy.In order to obtain this informa-
tion, the two most important dynamic gestures are
the novel dynamic Attention and Cancel, which indi-
cate the setting and resetting functions of the system,
respectively. These dynamic gestures have been de-
scribed in our paper (Lics
´
ar and Szir
´
anyi, 2005). The
system uses gesture recognition technology to force
the user to communicate briefly, quickly, and effec-
tively with the drone in specific environments.
3.1 Data Collection
OpenPose (Cao et al., 2017) is a real-time multi-
person framework displayed by the Perceptual Com-
puting Lab of Carnegie Mellon College (CMU) to
identify a human body, hand, facial, and foot key
points together on single images. Based on the ro-
bustness of the OpenPose algorithm and its flexibility
in extracting keypoints, we used it to detect human
skeleton and obtain skeletal data for different gestures
on the human body, thus laying the data foundation
for subsequent recognition.The key idea of OpenPose
is to use a convolutional neural network to generate
two heap maps, one for predicting joint positions, and
the other for partner the joints into human skeletons.
In short, the input to OpenPose is an image and the
output is the skeleton of all the people detected by
this algorithm. Each skeleton has 18 joints, counting
head, neck, arms, and legs, as appeared in Table 1.
Figure 3 shows the skeleton data and Table 1 gives
the key points information.
As there is no publicly available relevant dataset
in the field of wilderness rescue by drones, to ad-
dress this problem we created a new dataset specif-
ically describing short and meaningful physical res-
cue gestures made by humans in different situa-
tions.Considering that people in different countries
have different cultural backgrounds, certain gestures
may represent different meanings. Therefore, we
have selected and defined 10 representative rescue
Table 1: OpenPose joints information.
Number Joints Number Joints
0 Nose 9 Right Knee
1 Neck 10 Right Foot
2 Right Shoulder 11 Left Hip
3 Right Elbow 12 Left Knee
4 Right Wrist 13 Left Foot
5 Left Shoulder 14 Right Eye
6 Left Elbow 15 Left Eye
7 Left Wrist 16 Right Ear
8 Right Hip 17 Left Ear
gestures that are used to convey clear and specific
messages without ambiguity that humans make in dif-
ferent scenarios. These gestures include Kick, Punch,
Squat, Stand, Attention, Cancel, Walk, Sit, Direction
and PhoneCall. The dataset can of course be extended
to a larger dataset.
The datasets are collected using a 1080P 160
◦
fish eye
surveillance camera module for raspberry pi on the
3DR SOLO UAV system.The data set was collected
from six members of our laboratory who also took
part in the real-time test that followed. Four of them
were male and two were female, aged between twenty
and thirty years old. They made all possible varia-
tions for all gestures.The system proposed in this pa-
per recognises ten very common body rescue gestures
in real time, including Kick, Punch, Squat, Stand, At-
tention, Cancel, Walk, Sit, Direction and PhoneCall.
We have collected as many ’attention’ and ’cancel’
gestures as possible in order to make the system more
powerful for setting and resetting. Table 2 describes
the details of each gesture. Table 3 describes the de-
tails of the UAV rescue dataset.
In our dataset, the focus is on two dynamic gestures
(Attention and cancel), which are completely separate
from the static gesture mode, as they represent the
system’s setting and resetting functions.The system
will only issue an alert if it recognises these two ges-
tures above. Attention indicates that the user needs to
establish communication with the drone. Conversely,
”Cancel” sends an alert indicating that the user does
not need to establish contact and that the system will
automatically shut down.When other rescue gestures
are recognised, the system will not issue an alert.
With the exception of ’Attention’ and ’Cancel’, the
remaining eight gestures are considered to be signs of
normal human activity and therefore do not interact
further with the drone.
IMPROVE 2021 - International Conference on Image Processing and Vision Engineering
182
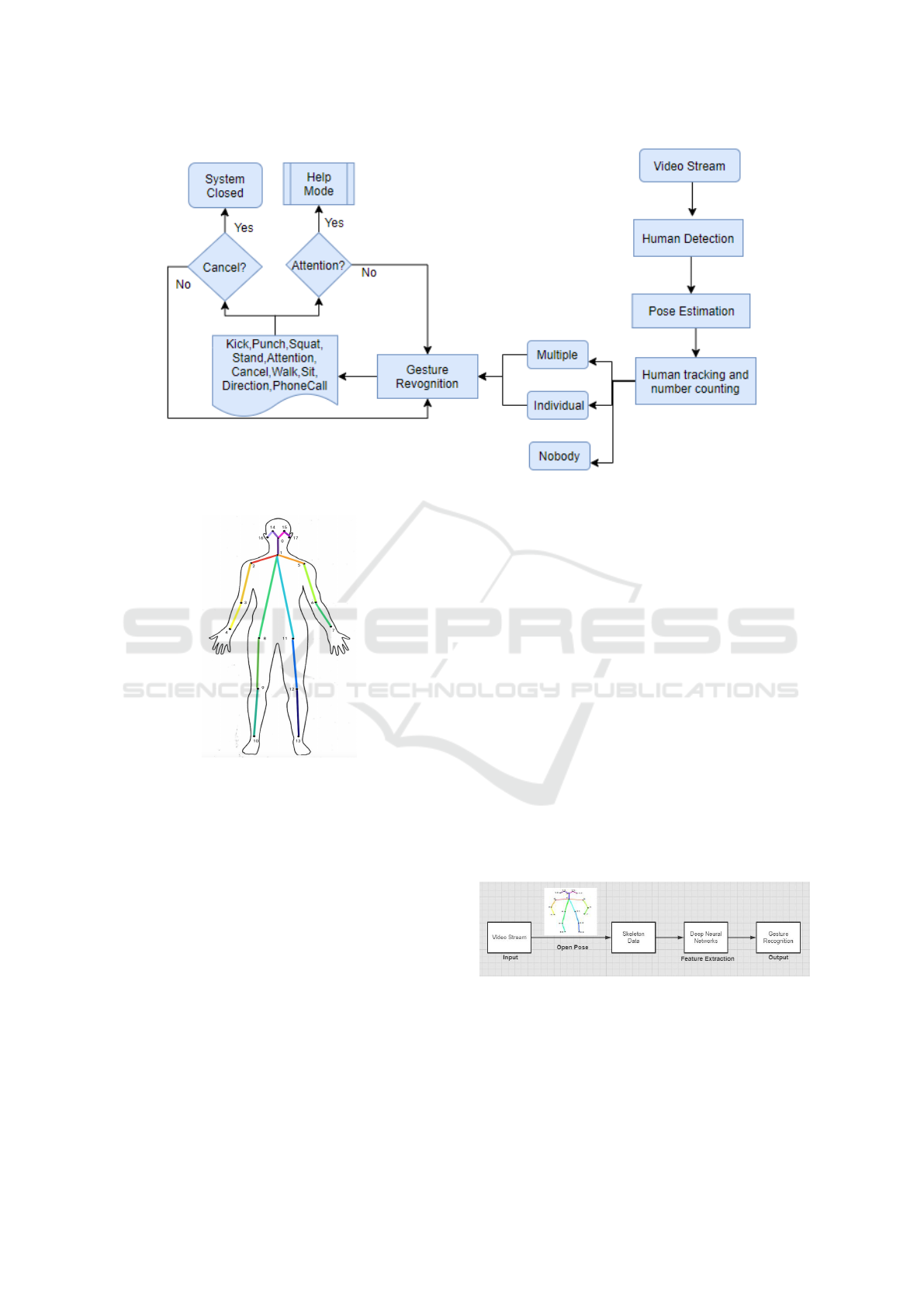
Figure 2: Framework of the whole system.
Figure 3: OpenPose skeleton data.
3.2 Gesture Recognition
Figure 4 shows the flow chart for human gesture
recognition. The human skeleton is first detected by
the input video stream using the OpenPose algorithm
to obtain skeletal information data, followed by fea-
ture extraction based on this skeletal data, and fi-
nally fed into a classifier to obtain recognition re-
sults. We performed real-time pose estimation with
OpenPose by using a pre-trained model as the estima-
tor (Lawrence, 2021).A deep neural network (DNN)
model is used for predicting the user’s rescue ges-
tures. We use Deep SORT algorithm(Wojke et al.,
2017) for human tracking of multi-person scenes. The
main difference from the original SORT algorithm
(Bewley et al., 2016) is the integration of appearance
information based on a deep appearance descriptor.
The Deep SORT algorithm allows us to calculate a
depth feature for each bounding box and add this fea-
ture using the similarity between depth features as a
factor in the tracking logic. Based on the above de-
scription we can obtain information about the human
body. Next by counting the number of people we ar-
rive at the following three scenarios: no one, indi-
viduals and multiple people. For case 1, if the drone
does not detect any person, then no communication
between the drone and the user can be established and
gesture recognition has no meaning. For cases 2 and
3, if the drone detects one or more people, then the
drone will enter the gesture recognition phase and dis-
play the corresponding recognition results based on
the user’s body gestures, in order to enable communi-
cation between the user and the drone and thus to help
humans. When the two dynamic gestures ”Attention”
and ”Cancel”, which represent the system settings and
reset functions respectively, appear, the system will
display a warning, open the help mode or cancel the
interaction.
Figure 4: Workflow of the human gesture recognition sys-
tem.
In contrast to other gesture recognition methods (e.g.
using 3D convolutional neural networks(Carreira and
Zisserman, 2017)), we finally chose the OpenPose
skeleton as the basic feature for human gesture recog-
nition. The reason is that the features of the hu-
Gesture Recognition for UAV-based Rescue Operation based on Deep Learning
183
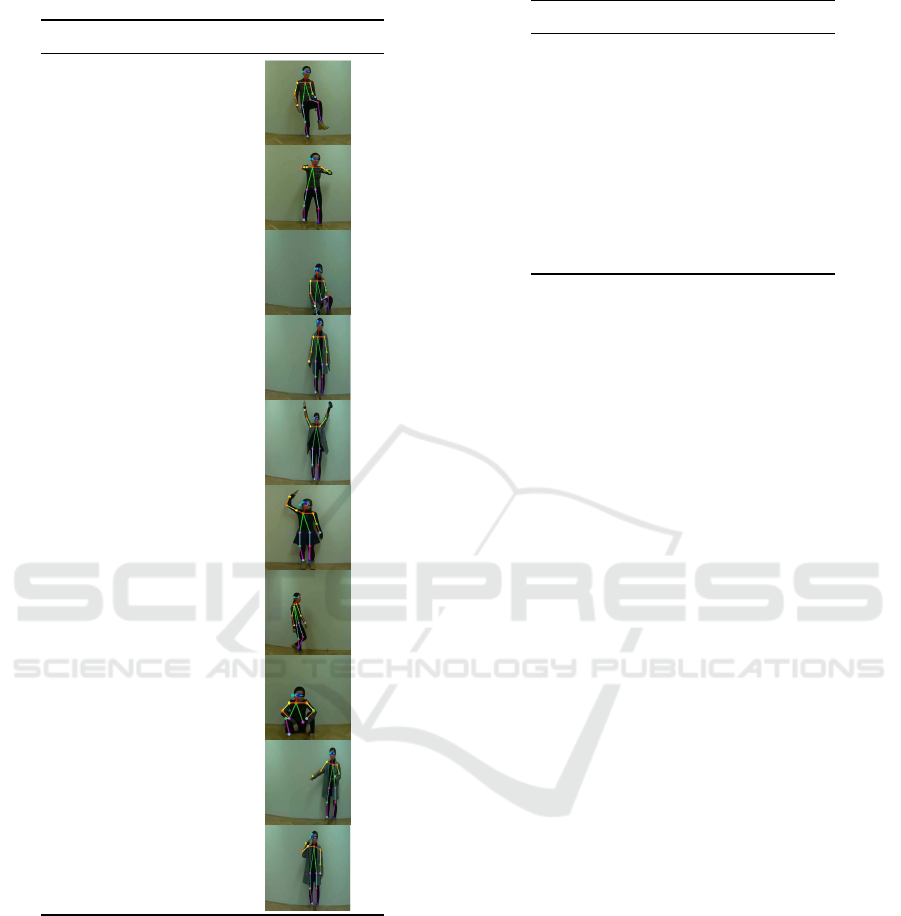
Table 2: UAV rescue gestures and corresponding key-
points.
Number Name Reuse Gestures
1 Kick
2 Punch
3 Squat
4 Stand
5 Attention
6 Cancel
7 Walk
8 Sit
9 Direction
10 PhoneCall
man skeleton are simple, intuitive and easy to dis-
tinguish between different human gestures. In con-
trast, 3DCNNs are both time-consuming and difficult
to train large neural networks. As for the classifiers,
we experimented with four different classifiers, in-
cluding kNN (Guo et al., 2003), SVM (Mavroforakis
and Theodoridis, 2006), deep neural network (Liu
et al., 2017), and random forest (Pal, 2005). Exper-
iments were conducted on the above four classifiers,
and from the accuracy values obtained, DNN has the
highest accuracy, so we choose DNN as the classifier
for gesture recognition. The implementation of these
Table 3: UAV rescue gesture dataset details.
Number Name No.of data
1 Kick 784
2 Punch 583
3 Squat 711
4 Stand 907
5 Attention 1623
6 Cancel 1994
7 Walk 722
8 Sit 942
9 Direction 962
10 PhoneCall 641
classifiers was from the Python library “sklearn”.
The DNN model has been programmed using Keras
Sequential API in Python. There are 4 dense layers
with batch normalization behind each one and 128,
64, 16, 10 units in each dense layer sequentially. The
last layer of the model is with Softmax activation
and 10 outputs. Based on the establishment of the
above DNN model for gesture recognition, the next
step is training. The model is compiled using Keras
with TensorFlow backend. The categorical cross-
entropy loss function is utilized because of its suit-
ability to measure the performance of the fully con-
nected layer’s output with Softmax activation. Adam
optimizer with an initial learning rate of 0.0001 is uti-
lized to control the learning rate. The model has been
trained for 50 epochs on a system with an Intel i7 -
5930K CPU and NVIDIA GeForce GTX TITAN X
GPU. The total training dataset is split into two sets:
90% for training, and 10% for testing. Specific infor-
mation such as the accuracy and loss of the final body
gesture recognition model is specified in Section 4.
4 EXPERIMENTS
Based on the introduction in Chapter 2, the testing
phase of the designed system was done in a simulated
field environment in the laboratory, and the actual run-
ning time required for gesture recognition to run on
the GPU-based ground station was 25 ms. It should
be noted that the results shown below are cropped im-
ages, and the original image should be in a 4:3 ratio,
as we tried to recreate the field environment without
clutter (e.g. tables and chairs that we did not want to
include ), so we have cropped a fixed area of the out-
put video. As the communication between the UAV
and the GPU-based ground station in the lab relies on
the local network, requests sent from the client and
accepted by the server directly reduce the value of the
FPS, resulting in a very slow running system. The
IMPROVE 2021 - International Conference on Image Processing and Vision Engineering
184
system only achieves around 5 FPS in real-time op-
eration, but running directly on the UAV with the Jet-
son Xavier GPU solves this problem. It should also be
noted that in laboratory tests, the UAV should fly in an
inclined position above the person, at a distance of ap-
proximately 2 to 3 metres from the user. The angled
position ensures that the entire human body can be
recognised with a higher probability than flying ver-
tically downwards directly above the user’s head, and
as the work is based on the human skeleton, the fly-
ing position of the drone has some limitations on the
recognition results.
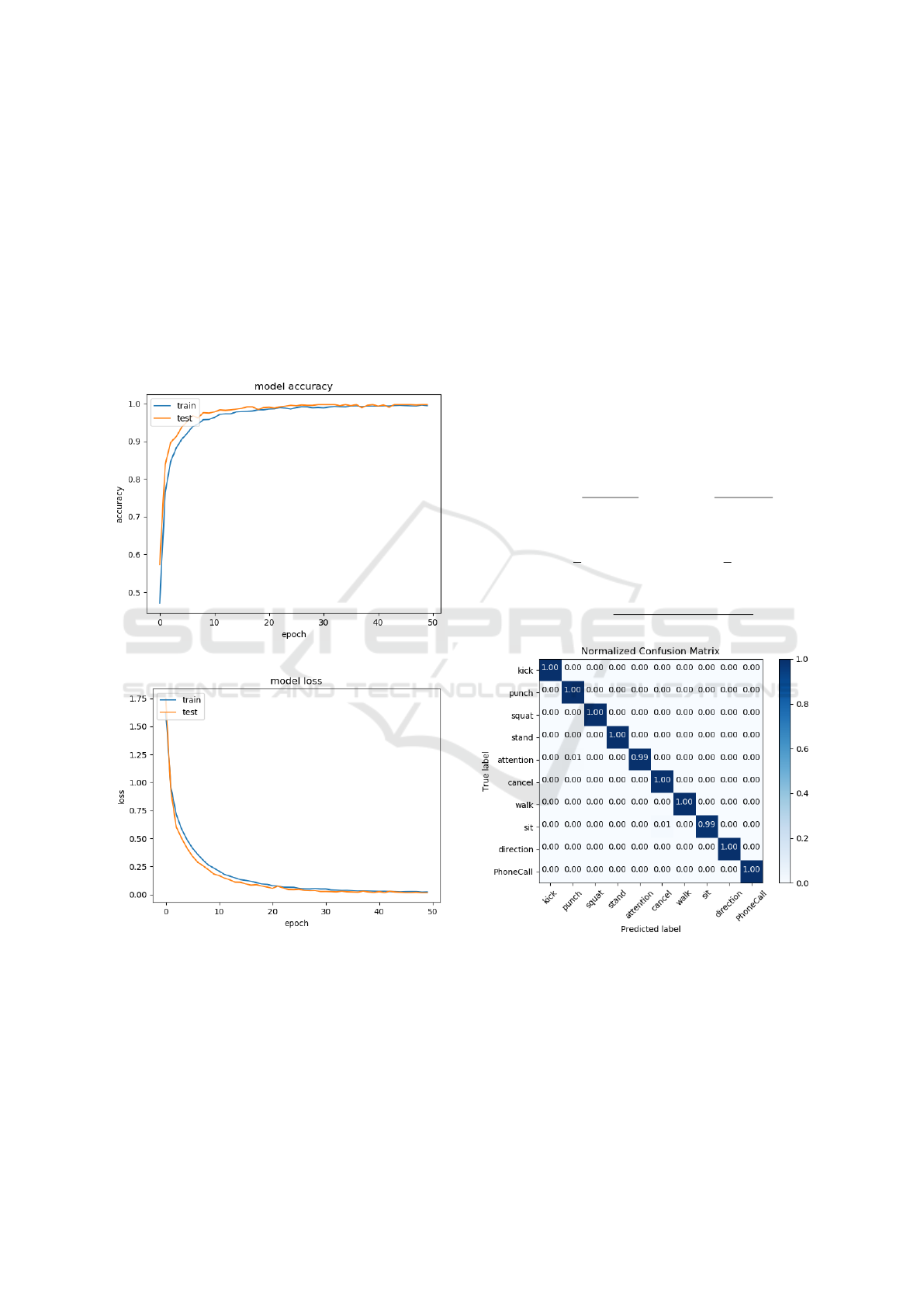
Figure 5: Model accuracy over the epochs.
Figure 6: Model loss over the epochs.
Based on the human rescue gesture dataset created in
Table 2, we trained the model through a deep neu-
ral network and eventually obtained the accuracy and
loss of the human gesture recognition model. During
the training process, the accuracy and loss functions
change as shown in Figures 5 and 6. First, the accu-
racy of training and testing increases rapidly. There-
after, it grows slowly between 10 and 20 epochs and
merges after 30 epochs. After 40 epochs there is
less noise in between. The weights of the best fitting
model with the highest test accuracy are preserved.
Both training and test losses are decreasing and con-
verging, thus showing a well-fitting model.After 50
epochs of training, the model achieved an accuracy
of 99.47% on the training data and 99.09% on the test
data. Figure 7 shows the normalised confusion matrix
on the test set. The high density at the diagonal shows
that the majority of human rescue gestures are cor-
rectly predicted. In most gestures, the performance is
good and close to perfect. We also analyzed the per-
formance of the model from other standard metrics.
We used the following equations to calculate macro-
F1. Based on the true positives (TP), false positives
(FP), false negatives (FN) and true negatives (TN) of
the samples, we calculated P-values (Precision) and
R-values (Recall) respectively, resulting in macro F1
values mostly close to 1.00.
Precision =
T P
T P + FP
, Recall =
T P
T P + FN
(1)
macroP =
1
n
n
∑
i=1
P
i
, macroR =
1
n
n
∑
i=1
R
i
(2)
macroF1 =
2 × macroP × macro R
macroP + macroR
(3)
Figure 7: Normalized Confusion matrix with predicted la-
bels on X-axis and true labels on the Y-axis in testing set.
Figures 8 shows the recognition of Attention gesture
and Cancel gesture with warning messages in real
time. Information about the number of people, time,
frame rate and FPS is also shown. The results of
the recognition of two basic gestures, chosen at ran-
dom from the dataset, are described in detail.Figure 9
shows that when a user points in a particular direction,
the aim is to alert the drone to look in the direction that
Gesture Recognition for UAV-based Rescue Operation based on Deep Learning
185

the person is pointing. For example, when someone
is lying on the ground in the direction pointed, the
gesture is a good solution to the problem that when
someone is lying on the ground, the drone is not able
to recognise the skeletal information of the person ly-
ing on the ground very well due to the limitations of
the drone’s flight position. Figure 9 also shows the
user making a phone call with a gesture that could be
linked to hand gesture number recognition at a future
stage. When the user poses to make a call, we can per-
form hand number recognition to get the phone num-
ber the user wants to dial in the extension work.
Figure 8: Attention and Cancel.
Figure 9: Direction and PhoneCall.
When there are more than one person, one of them
sends an ”Attention” gesture to the drone. At this
point, the drone will send a warning that someone
needs help. This is shown in Figure 10. We can also
see in Figure 10 that the gestures of people other than
the person performing the Attention gesture are also
well recognised. Our gesture recognition system can
identify approximately 10 people at once. It is worth
raising the point that if a person is not fully present,
then that person will not be recognised. If the user
makes a gesture that is not in our data set, the person’s
gesture will not be recognised and the recognition re-
sult information above it will be blank.
Figure 10: Multiple people with Attention.
5 DISCUSSION AND FUTURE
WORK
In this paper we present a real-time human gesture
recognition system for UAV rescue. The practical ap-
plication and the laboratory test are two different sys-
tems. The system not only detects people, tracks them
and counts them, but also recognises the user’s ges-
tures.
The main innovations and contributions of this paper
are as follows: Firstly, it is worth acknowledging that
gesture recognition for wilderness rescue avoids in-
terference from the external environment, which of-
fers the greatest advantage over speech recognition
for rescue. A limited and well-directed dictionary of
gestures may force a short communication. Gesture
recognition is therefore a good way to avoid certain
communication deficiencies. Secondly, a dataset of
ten basic human rescue gestures (i.e. kick, punch,
squat, stand, attention, cancel, walk, sit, indicate and
phone call) was created for describing some physical
human gestures in the field. Finally, the two most im-
portant dynamic gestures are the novel dynamic ’at-
tention’ and ’cancel’, representing the set and reset
functions respectively. From a drone rescue perspec-
tive, we have done a good job of getting feedback
from users. This work has provided the basis for the
design of subsequent rescue routes.
In future work we need to include more generic res-
cue gestures into the gesture dataset. We also need
to make it possible for the system to automatically
retrain the model based on new data in a very short
period of time, thus obtaining new models with new
rescue gestures. Outdoor testing of drones equipped
with Jetson Xavier GPUs is also a future extension
work.
IMPROVE 2021 - International Conference on Image Processing and Vision Engineering
186

ACKNOWLEDGEMENTS
The work is carried out at Institute for Computer Sci-
ence and Control (SZTAKI), Hungary and the au-
thor would like to thank her colleague L
´
aszl
´
o Sp
´
or
´
as
for providing the infrastructure and technical sup-
port. This research was funded by Stipendium Hun-
garicum scholarship and China Scholarship Council.
The research was supported by the Hungarian Min-
istry of Innovation and Technology and the National
Research, Development and Innovation Office within
the framework of the National Lab for Autonomous
Systems.
REFERENCES
Barbedo, J. G. A. (2019). A review on the use of un-
manned aerial vehicles and imaging sensors for mon-
itoring and assessing plant stresses. Drones, 3:40.
Barekatain, M., Mart
´
ı, M., Shih, H., Murray, S., Nakayama,
K., Matsuo, Y., and Prendinger, H. (2017). Okutama-
action: An aerial view video dataset for concurrent
human action detection. In 2017 IEEE Conference on
Computer Vision and Pattern Recognition Workshops
(CVPRW), pages 2153–2160.
Bewley, A., Ge, Z., Ott, L., Ramos, F., and Upcroft, B.
(2016). Simple online and realtime tracking. 2016
IEEE International Conference on Image Processing
(ICIP), page 3464–3468.
Cao, Z., Simon, T., Wei, S.-E., and Sheikh, Y. (2017). Real-
time multi-person 2d pose estimation using part affin-
ity fields. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition (CVPR).
Carletti, V., Greco, A., Saggese, A., and Vento, M.
(2018). Multi-object tracking by flying cameras based
on a forward-backward interaction. IEEE Access,
6:43905–43919.
Carreira, J. and Zisserman, A. (2017). Quo vadis, action
recognition? a new model and the kinetics dataset.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition (CVPR).
De Smedt, F., Hulens, D., and Goedeme, T. (2015). On-
board real-time tracking of pedestrians on a uav. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR) Workshops.
Erdelj, M., Natalizio, E., Chowdhury, K. R., and Akyildiz,
I. F. (2017). Help from the sky: Leveraging uavs
for disaster management. IEEE Pervasive Computing,
16(1):24–32.
Gonc¸alves, J. and Henriques, R. (2015). Uav photogram-
metry for topographic monitoring of coastal areas. IS-
PRS Journal of Photogrammetry and Remote Sensing,
104:101 – 111.
Guo, G., Wang, H., Bell, D., Bi, Y., and Greer, K.
(2003). Knn model-based approach in classification.
In OTM Confederated International Conferences” On
the Move to Meaningful Internet Systems”, pages
986–996. Springer.
Hossain, S. and Lee, D.-J. (2019). Deep learning-based
real-time multiple-object detection and tracking from
aerial imagery via a flying robot with gpu-based em-
bedded devices. Sensors, 19:3371.
Hu, B. and Wang, J. (2018). Deep learning based hand ges-
ture recognition and uav flight controls.
Lawrence, C. (2021). reaktor/vzw-care-tf-pose-estimation.
Li, S. and Christensen, H. Wavetofly: Control a uav using
body gestures.
Lics
´
ar, A. and Szir
´
anyi, T. (2005). User-adaptive hand ges-
ture recognition system with interactive training. Im-
age and Vision Computing, 23(12):1102 – 1114.
Liu, W., Wang, Z., Liu, X., Zeng, N., Liu, Y., and Alsaadi,
F. E. (2017). A survey of deep neural network ar-
chitectures and their applications. Neurocomputing,
234:11 – 26.
Ma, Y., Liu, Y., Jin, R., Yuan, X., Sekha, R., Wilson, S.,
and Vaidyanathan, R. (2017). Hand gesture recogni-
tion with convolutional neural networks for the mul-
timodal uav control. In 2017 Workshop on Research,
Education and Development of Unmanned Aerial Sys-
tems (RED-UAS), pages 198–203.
Mavroforakis, M. E. and Theodoridis, S. (2006). A geo-
metric approach to support vector machine (svm) clas-
sification. IEEE Transactions on Neural Networks,
17(3):671–682.
Natarajan, K., Nguyen, T. D., and Mete, M. (2018). Hand
gesture controlled drones: An open source library.
In 2018 1st International Conference on Data Intel-
ligence and Security (ICDIS), pages 168–175.
Pal, M. (2005). Random forest classifier for remote sensing
classification. International journal of remote sensing,
26(1):217–222.
Park, K. and Ewing, R. (2017). The usability of unmanned
aerial vehicles (uavs) for measuring park-based physi-
cal activity. Landscape and Urban Planning, 167:157
– 164.
Perera, A. G., Law, Y. W., and Chahl, J. (2019). Drone-
action: An outdoor recorded drone video dataset for
action recognition. Drones, 3:82.
Perera, A. G., Wei Law, Y., and Chahl, J. (2018). Uav-
gesture: A dataset for uav control and gesture recog-
nition. In Proceedings of the European Conference on
Computer Vision (ECCV) Workshops.
Peschel, J. M. and Murphy, R. R. (2013). On the hu-
man–machine interaction of unmanned aerial system
mission specialists. IEEE Transactions on Human-
Machine Systems, 43(1):53–62.
Wojke, N., Bewley, A., and Paulus, D. (2017). Simple on-
line and realtime tracking with a deep association met-
ric. In 2017 IEEE International Conference on Image
Processing (ICIP), pages 3645–3649. IEEE.
Xia, G.-S., Bai, X., Ding, J., Zhu, Z., Belongie, S., Luo, J.,
Datcu, M., Pelillo, M., and Zhang, L. (2019). Dota:
A large-scale dataset for object detection in aerial im-
ages. arXiv:1711.10398 [cs].
Gesture Recognition for UAV-based Rescue Operation based on Deep Learning
187
