
An Approach to Reduce Network Effects in an Industrial Control
and Edge Computing Scenario
R
ˆ
omulo A. L. V. de Omena, Danilo F. S. Santos and Angelo Perkusich
Embedded Systems and Pervasive Computing Lab, Federal University of Campina Grande, 882 Apr
´
ıgio Veloso St.,
58429-970, Campina Grande, PB, Brazil
Keywords:
IIoT, Industry 4.0, Edge Computing, 5G, Model Predictive Control, AGV.
Abstract:
The cloud-based nature of Industry 4.0 enhances its flexibility and scalability features. To support time-
sensitive and mission-critical applications, whereby low latency and fast response are essential requirements,
usually cloud computing resources should be placed closer to the industry. The Edge Computing concept
combined with next-generation networks, such as 5G, may fulfill those requirements. This paper presents an
experimental system setup that combines a Model Predictive Control approach with a compensation strategy
to mitigate network delay and packet loss. The experimental system has two sides, namely, the edge and
the local side. The former executes the controller and connects to the local side through a network. The
latter is attached to the application and has lower computing capabilities. In our setup, the application under
control is a two-wheeled mobile robot, which could act as an Automated Guided Vehicle. We defined two
control objectives, the Point Stabilization, and the Trajectory Tracking, which ran through distinct network
conditions, including delays and packet losses. These control objectives are only validation scenarios of the
proposed approach but could be replaced by a real case path planner. The obtained results suggest that the
approach is valid.
1 INTRODUCTION
Driven by the Internet of Things (IoT) paradigm, the
new era of computing is bringing out the Internet
from the traditional desktop to many objects around
us (Gubbi et al., 2013), based on ubiquitous com-
puting, where smart environments recognize, iden-
tify objects, and retrieves information (Yaqoob et al.,
2017). Applications are spread in several domains,
such as smart homes, healthcare, industrial automa-
tion, agriculture, school, market, and vehicles (Al-
Fuqaha et al., 2015).
The application of IoT in industries covers an area
called the Industrial Internet of Things (IIoT). In an
IIoT system, the industrial “things”, such as sensors,
controllers, actuators, production lines, and equip-
ment, connect to the Internet. They can improve pro-
ductivity, efficiency, safety, and intelligence of indus-
trial factories and plants (Xu et al., 2018). Sisinni
et al. (2018) considers the IIoT as a subset of IoT, and
merging IIoT and Cyber-Physical Systems (CPS) re-
sults in the Industry 4.0. An essential feature of IIoT
is the cloud-based nature, making it more flexible and
scalable than conventional industrial systems (Wan
et al., 2016).
To fulfill the requirements of mission-critical and
time-sensitive systems, where low latency commu-
nication and fast response are essential, the physi-
cal distance to the cloud computing servers may not
meet those requirements. To deal with cloud com-
puting limitations, the “Edge Computing” concept
has emerged, bringing cloud services closer to de-
vices. It is also known as the “cloud closer to the
ground” (Kaur et al., 2018). In an industrial en-
vironment, edge computing introduces an interme-
diate level, separating the field level domain from
cloud-based services. The field devices perform tasks
regarded to industrial automation and need to re-
act faster; therefore, latency and reliability are real-
time constraints and requirements of communication
links (Pallasch et al., 2018). In the context of IIoT
and Industry 4.0, edge computing provides high band-
width, low latency, and low jitter, necessary to process
urgent and complex tasks on time. Battery-powered
devices and sensors, restricted in energy consump-
tion, also take advantage of edge computing, as tasks
demanding high processing are transferred to a higher
layer (Aazam et al., 2018).
Qiu et al. (2020) highlights some advantages of
296
V. de Omena, R., Santos, D. and Perkusich, A.
An Approach to Reduce Network Effects in an Industrial Control and Edge Computing Scenario.
DOI: 10.5220/0010496502960303
In Proceedings of the 11th International Conference on Cloud Computing and Services Science (CLOSER 2021), pages 296-303
ISBN: 978-989-758-510-4
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

the Edge Computing in IIoT: 1) improve system per-
formance by reducing the overall delay of the system;
2) protect data security and privacy, reducing risks of
data leakage; 3) reduce operational costs, as the data
uploading volume to cloud and bandwidth consump-
tion is reduced. Chen et al. (2018) discuss the co-
operation mechanism between Cloud Computing and
Edge Computing. On the one hand, Edge Comput-
ing better supports real-time processing. On the other
hand, Cloud Computing focuses on analyzing big data
and knowledge mining from the data obtained at the
edge, playing an important role in periodic mainte-
nance, decision support, and other tasks that do not
need to be performed in real-time.
When the mobile network provides the edge com-
puting services, it is called Multi-Acess Edge Com-
puting (MEC) (Abbas et al., 2018), which delivers
computing capabilities through the Radio Access Net-
work (RAN), therefore reducing latency and improv-
ing the Quality of Service (QoS) (Kiani and Ansari,
2018). 5G mobile networks are expected to bring net-
works with ultra-low latency and ultra-high reliability
(ULLRC). Thus, the merging of MEC and 5G is ex-
pected to attend mission-critical IoT demands and the
Tactile Internet. For the latter, the requirement of end-
to-end latency is about 1 ms (Rimal et al., 2017).
The control systems based on Cloud or Edge
Computing inherits some features of the Networked
Control Systems (NCS) field (Hespanha et al., 2007).
However, differently, the legacy hardware controllers
are replaced by software instances. The controllers’
softwarization improves the operational efficiency
and flexibility and can be provisioned on-demand and
are easier to be upgraded (Zhao and D
´
an, 2018).
The IIoT and Industry 4.0 are paradigms that
might be empowered by the new upcoming edge com-
puting and 5G technologies. Motivated by this con-
text, we present an experimental setup of a control ar-
chitecture implemented using Edge Computing, tak-
ing a two-wheeled mobile robot as a use case. In-
side the industry, we consider that the wheeled mobile
robot can act as an Automated Guided Vehicle (AGV)
transporting goods from A to B. The results from the
initial stage of this research are presented in this pa-
per, in which techniques to control the mobile robot
through Edge Computing are under evaluation. Such
an approach aims to reduce the effects of the com-
munication network in the control system. For this
purpose, the Model Predictive Control (MPC) with a
delay and packet loss compensation method is applied
to control the mobile robot at different network condi-
tions. Two different control objectives are performed,
the Point Stabilization and the Trajectory Tracking,
ran through distinct network conditions, including de-
lays and packet losses.
The remainder of this paper is organized as fol-
lows. A literature review, including the main con-
cepts, is presented in Section 2. More details about
the experimental setup and the algorithms are pre-
sented in Section 3. The validation and results dis-
cussion are in Section 4. Finally, the conclusions are
presented in Section 5.
2 LITERATURE REVIEW
A networked predictive control has been proposed in
Liu et al. (2007) to deal with the communication de-
lay in both forward and feedback channels. For com-
pensation of the random network delay, the controller
can generate a control sequence within a prediction
horizon, sent in a single packet to the plant. With-
out communication delay, only the control sequence’s
first signal is applied to the plant, and the remain-
ing predicted control signals are discarded. When the
network is subject to communication delay, the for-
ward channel (controller-to-actuator) will be delayed
or dropped. Therefore, the predicted control inputs
from the last available sequence are applied to the
plant until a new packet has arrived. To compensate
for the feedback (sensor-to-controller) delay, a predic-
tor is used to predict the current plant state ˆx.
Similarly, Findeisen and Varutti (2009) uses a
nonlinear model predictive controller to compensate
for the network nondeterminism. The timestamps of
the packets coming from the plant side is used to
estimate the τ
sc
(sensor-to-controller delay). Given
that the delays on the actuation side are stochastic,
the τ
ca
(controller-to-actuator delay) is assumed to
be known. The state prediction can now be calcu-
lated, considering τ
sc
and τ
ca
, and the MPC opti-
mization problem is triggered. Hence, the control
packet timestamp is shifted to τ
ca
and sent to the actu-
ator. This one is tasked with applying the control in-
put when the timestamp matches the actuator’s inner
clock. Other similar compensation strategies can be
seen (Pin and Parisini, 2011), also including wireless
networks (Ulusoy et al., 2011) and decentralized (Ho-
jjat A. Izadi and Zhang, 2011) or distributed (Gr
¨
une
et al., 2014) approaches.
When the industrial control is merged with the
cloud computing, the “as a service” concept applied to
control comes up. Esen et al. (2015) investigates the
“Control as a Service” concept to control a car using
cloud computing. Analogously, Hegazy and Hefeeda
(2015) inserts the industrial automation in the cloud
services paradigm. To attend the realtime require-
ments, the execution of industrial control in the edge
An Approach to Reduce Network Effects in an Industrial Control and Edge Computing Scenario
297
computing has been investigated (Abdelzaher et al.,
2020; Chen et al., 2020).
Relocating the MPC controller to the cloud or
edge computing is already a research area. Skarin
et al. (2018) combines the edge computing with a
5G network and performs tests involving some nodes
at Lund, Sweden. They evaluate the MPC’s perfor-
mance as the controller of a ball and beam process,
implemented in nodes with different processing capa-
bilities, and hosted at different places. Skarin et al.
(2019) runs the MPC in the edge, however, a Linear
Quadratic Regulator (LQR) implemented locally as-
sumes when the packets are delayed or lost. Vick et al.
(2016) use a computer to represent a cloud service,
run an MPC to control a robot and to compensate the
network delays.
Based on the literature review, the delay and
packet loss compensation methods with MPC is
adopted here. Additionally, the future trajectory to
be followed by the mobile robot is included in the
MPC optimization problem for the Trajectory Track-
ing simulations. This procedure will make the con-
troller preview the linear and angular velocities con-
trol sequence necessary to the robot follow the desired
path during the prediction horizon. The actuator uses
such control sequence to compensate for the delays
and packet losses.
Up to now, this works involves only the interaction
between the Edge Computing (named here as the edge
side) and the lower level (named local side). The lat-
ter is the controlled plant or process, here, represented
by the mobile robot or AGV. Next steps may offload
more tasks to the edge side, as the path planning and
collision avoidance procedures, to name a few. Ad-
ditionally, the Cloud Computing may cooperate with
the edge side processing massive data related to tasks
that not requires fast response.
3 EXPERIMENTAL SETUP
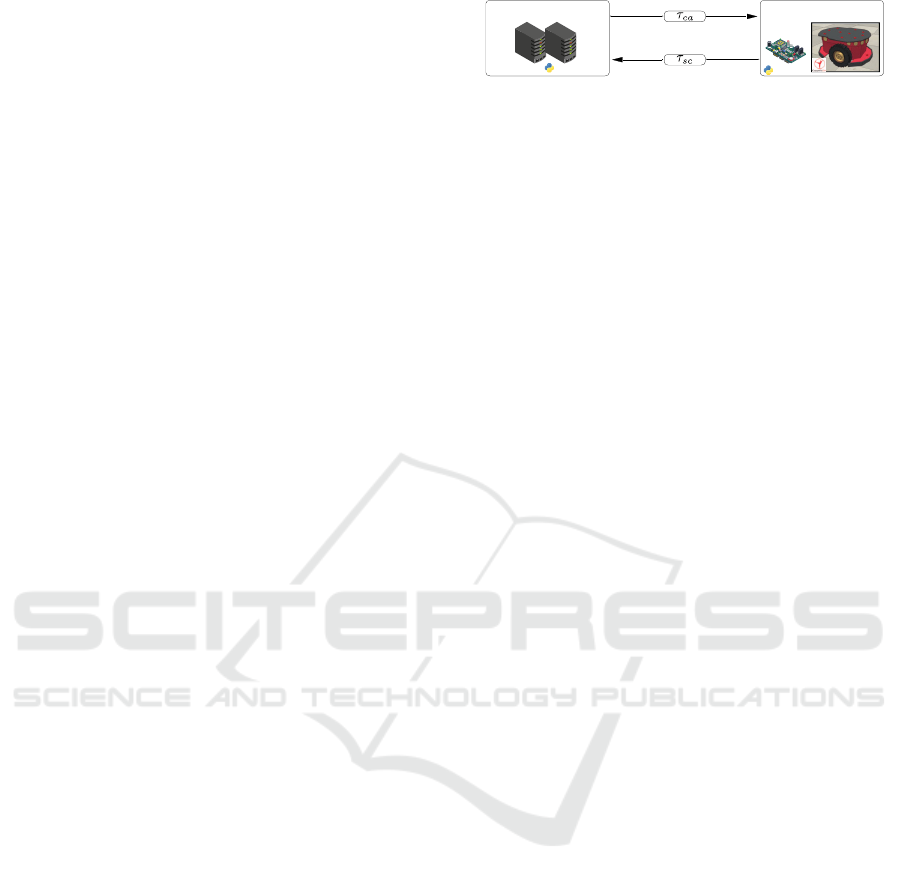
The basic architecture of the experimental setup is
shown in Figure 1. The evaluation of the system is
carried out through two computers. The first rep-
resents the edge computing side and performs as a
server. The second, located at the local side and at-
tached to the robot, act as the client, sending state
measurements and waiting for responses from the
server containing the control sequence input. For both
sides, the communication protocol used to deliver and
receive packets is the UDP.
The robot used is the Pioneer 3-DX and is sim-
ulated in the CoppeliaSim (Rohmer et al., 2013).
Through an Application Programming Interface
Edge Side Local Side
Figure 1: Basic architecture of the experimental setup.
(API), the CoppeliaSim is linked to the local side
through a TCP/IP socket. Note that the CoppeliaSim
runs in a computer over an operating system; how-
ever, since the tool is simulating the robot at the local
side, the computer associated is considered to have
limited computing capabilities, but can run the sen-
sor and actuator routines, and can send/receive data
by the communication network. Suppose that a phys-
ical robot would be used. In this case, the computer
which simulates the robot in CoppeliaSim would be
changed by a physical robot attached to a computer
with limited resources (e.g., a Raspberry Pi) or even a
microcontroller.
The flowcharts of Figure 2(a) and 2(b), respec-
tively, describes how the edge code and the sen-
sor thread of the local code works. Both software
executed at the edge and local sides are written in
Python and are referred to as the edge code and lo-
cal code. The network delays are estimated through
timestamps. τ
sc
in the edge code, while τ
ca
is es-
timated by the local code and is given back to the
edge code. The edge and local clocks are assumed to
be synchronized. τ
mpc
is estimated during the MPC
optimization running. With these delays, the pre-
dictor can finally predicts the robot’s state and trig-
ger the MPC optimization problem solved through
CasADi (Andersson et al., 2019). The sensor sam-
pling interval is T (equal to the time step of the MPC
predictions).
The experimental procedure is facilitated by im-
plementing the edge and local side on the same com-
puter. However, the local code and CoppeliaSim
runs in the native operating system, while the edge
code runs in a Linux virtual machine. The virtu-
alization software creates the virtual network inter-
face between the native and virtualized operating sys-
tem. The ERRANT (EmulatoR of Radio Access NeT-
works) developed by Trevisan et al. (2020) and the
Linux NetEm (Network Emulator) has been adopted
to emulate some network profiles. The ERRANT is
an open-source tool that emulates mobile networks
based on a data set composed of real measurements
and runs on top of NetEm. That tool was used in
this work to emulate the 3G and 4G networks. The
NetEm was also purely applied to emulate a network
with packet loss and a 5G network. The network em-
ulation was carried out in the virtual machine at the
local side. More details about the overall system op-
eration are discussed in Section 4.
CLOSER 2021 - 11th International Conference on Cloud Computing and Services Science
298
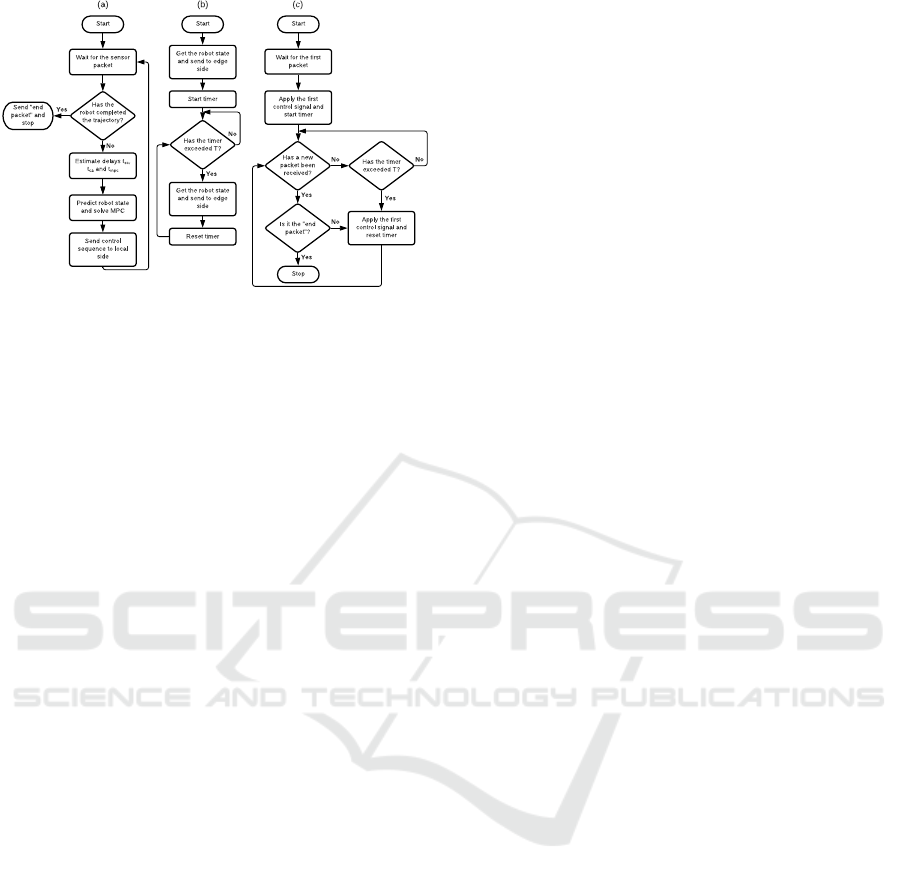
Figure 2: Flowchart describing the operation of: (a) Edge
code, (b) and (c) the sensor thread and the compensation
strategy of the local code, respectively.
3.1 Model Predictive Control
The MPC, sometimes referred to as Receding Hori-
zon Control, obtains control actions by solving a finite
horizon open-loop optimal control problem at each
sampled state. The plant’s measured state is taken as
the initial state for the optimization problem, calcu-
lated within a prediction horizon N. This MPC pro-
cedure makes it different from conventional control,
on what a pre-computed control law is adopted. The
MPC can deal with constraints, defining limits for the
plant state’s control input and safety limits. Another
essential feature is the capability to control a multi-
variable process (Mayne et al., 2000).
The optimization problem is determined to mini-
mize the following cost function J:
minimize
u
J =
N−1
∑
k=0
x
0
(k)Qx(k) + u
0
(k)Ru(k) (1)
subject to g1 ≤ G1 and g2 = G2
where x(k) and u(k) denotes the state and the control
input, respectively. The diagonal matrix Q penalizes
the difference between the predicted state and the ref-
erence, while the matrix R does the same with the con-
trol input. G
1
and G
2
are, respectively, the inequality
and equality constraints. The basic MPC (Bemporad
and Morari, 1999) so runs repeatedly the following
sequence:1) get the new state x(k); 2) solve the opti-
mization problem (1); 3) apply only u(k) = u(k +0|k);
4) make k ← k + 1 and go to step 1.
3.2 Compensation Strategy
The compensation strategy for the network delay and
packet loss is deployed in the local code and is briefly
represented by the flowchart of Figure 2(c). After the
local code has started, it waits for the first packet com-
ing from the edge side. When received, it applies the
first control signal of the sequence generated by the
MPC and start the timer. Whenever a new packet has
arrived, the first control signal is applied and the timer
is reset. If the packet is delayed or lost and the time
exceeds T, the next control signal is applied and the
timer is again reset. If the last control signal has been
reached, it continues being applied until a new packet
is received. The “end packet” is a packet sent by the
edge side when the robot has completed the trajectory.
It is sent several times to ensure that it will reach the
other side in case of packet losses.
3.3 Mobile Robot
The differential driving mobile robot, classified as
a non-holonomic mobile robot, may have two rear
wheels and a front castor wheel, or a four-wheel
configuration. The two wheels configuration is used
here. Details of the kinematic equation can be seen
in Dongbing Gu and Huosheng Hu (2006).
The state and control signal vectors are respec-
tively denoted as x = [x y θ]
T
and u = [v ω]
T
. The
state variables x and y represents the Cartesian posi-
tion in meters of the robot, and θ is the robot orienta-
tion in radians referenced from the x axis. The control
variables are the linear speed v, in meters per second,
and the angular speed ω, in radians per second. The
robot’s linear and angular speeds depends on the left
and right wheel speeds and the distance between the
wheels.
4 VALIDATION
The validation procedure was based on tests con-
ducted by Dongbing Gu and Huosheng Hu (2006)
and Mehrez et al. (2013), whose MPC is applied to
control a wheeled mobile robot. The same control
objectives are adopted here, which are Point Stabi-
lization and Trajectory Tracking. The items included
in the CoppeliaSim scene are the Pioneer 3-DX robot
and a floor with dimensions 25x25 m, where x and y
covers the intervals from -12.5 to 12.5 m.
It’s important to note that, for now, the main idea
is to validate the compensation strategy detailed in
the previous section. The trajectories followed by the
AGV during the validation are not necessarily a real
case of the Industry 4.0 or any other application, but is
enough to evaluate the controlling of the AGV at dis-
tinct network conditions, including favorable condi-
tions, the case of a 5G network, or bad conditions, the
case of a network with high delays and packet losses.
An Approach to Reduce Network Effects in an Industrial Control and Edge Computing Scenario
299

4.1 Point Stabilization
For the Point Stabilization simulations, the robot
should leave from the initial state x
0
and stabilize at
the desired reference x
r
. The vectors were adjusted as
x
0
= [−11.5 − 11.5 0]
T
and x
r
= [11.5 11.5 π]
T
for
all the simulations. If the reference orientation an-
gle is chosen π, the robot should maneuver near to
the state constraints and, thus, the MPC performance
in this circumstance can be evaluated. The controller
time step was set as T = 40 ms and the prediction
horizon size as N = 40, resulting in a prediction hori-
zon of 1600 ms in time. The sensor sampling period is
made equal to T. The state constraints imposed to the
MPC are −12.5 ≤ x ≤ 12.5 m and −12.5 ≤ y ≤ 12.5
m, which coincides with the floor dimensions set in
the CoppeliaSim scene. For the control signals, the
constraints are −1.2 ≤ v ≤ 1.2 m/s and −π/4 ≤ ω ≤
π/4 rad/s for the linear and angular speeds, respec-
tively.
Four network profiles have been taken an account
to evaluate the robot controlling in different network
conditions. The 3G and 4G networks were emulated
through the ERRANT. Since the tool emulates the
network based on a data set of real measurements,
there are different bandwidth and latency situations
for a single network technology, which could be re-
lated to the signal quality, for example. In this case,
for the 3G and 4G profiles, the network conditions
were configured to change every 5 seconds. The
NeTem purely was used to emulate the two other pro-
files. For the 5G profile, no changes have been applied
to bandwidth, and the whole bandwidth of the Giga-
bit virtualized network interface is available. The up-
link and downlink delay was adjusted to 0.5 ms with a
normal distribution of 0.05 ms, resulting in a total la-
tency of 1 ms. The other profile, called 200msPL50%,
has 100 ms of delay per channel, with a normal dis-
tribution of 10 ms, totalizing a latency of 200 ms.
The same profile has 50% of packet losses per chan-
nel. The weights of the MPC cost function are de-
fined as diagonal matrixes and were adjusted to Q =
diag(20,20,30) and R = diag(20,60). The two first el-
ements of Q penalizes the states x and y, while the
last does with θ. For R, the first and second elements
penalize the linear and angular speeds control signals,
respectively.
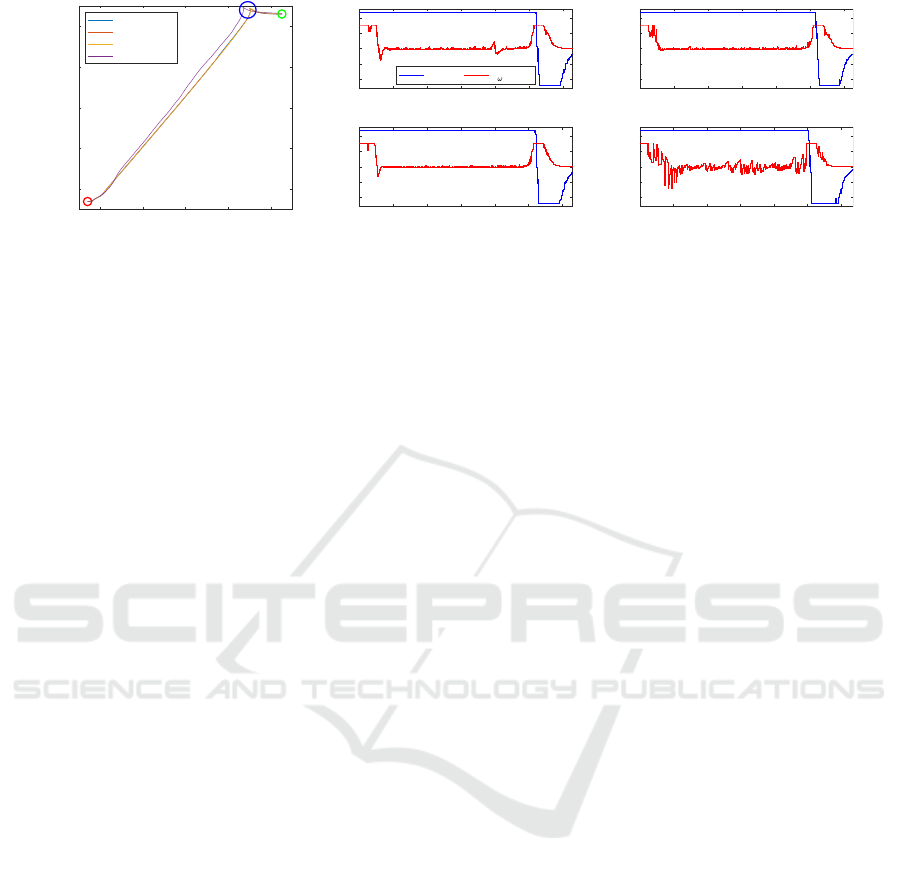
In Figure 3(a) is shown the trajectory of the robot
obtained for all the network profiles. The red circle
circumscribes the region where is the initial point, and
the green circle, the final point. The blue circle delim-
its the region where the robot maneuver to stabilizes
in the desired reference. The maneuver occurs be-
cause the reference angle is set as π, and, in this case,
the robot should turn left and apply a reverse speed to
reach the final point.
The control signals related to the linear and an-
gular speeds, applied to the robot, for each network
profile, are shown in Figure 3(b) to 3(e). The sim-
ulations were programmed to end when the absolute
value of the difference between the reference and the
state vectors’ norms was less or equal to 0.2. This
occurred after approximately 32 s.
About the compensation strategy implemented by
the actuator in the local side, the biggest step in the
control sequence (for a prediction horizon of N = 40)
was to the 4
th
element (starting from zero) for the 5G
profile. It means that, at one or more particular mo-
ments of the simulation, the local side remained four
times the controller’s time step (T ) without receiving
a new packet. Thus, the actuator has continued ap-
plying the control signals of the sequence generated
by the MPC until the arrival of a new packet with a
more recently calculated control sequence. For the
4G and 3G profiles, the advancing has been to the
7
th
and 15
th
elements, respectively. As expected, the
control signal sequence steps would be bigger in the
200msPL50% profile, once a percentage of the pack-
ets are lost. In this case, the actuator advanced until
the 25
th
element. Even with the delays and packet
losses, the MPC combined with the compensation
strategy can stabilize the robot at the desired refer-
ence.
4.2 Trajectory Tracking
In the Trajectory Tracking, all the simulations pro-
cedures and adjustments were the same, except for
the reference. Now, the reference vector is not
fixed, but is time varying. Two trajectories with
different shapes were simulated, the circular-shape
and eight-shape. The reference vector is given by
x
r
= [x(t) y(t) θ(t)]
T
. For the circular-shape, x(t) and
y(t) are calculated by x
1
(t) and y
1
(t) from (2). x
2
(t)
and y
2
(t) from the same equation are used for the
eight-shape. For both shapes, θ(t) is calculated by
(3), where T is the controller time step.
x
1
(t) = 10.0 sin(0.1t) x
2
(t) = 11.5 sin(0.1t)
y
1
(t) = 10.0 cos(0.1t) y
2
(t) = 10.0 cos(0.05t)
(2)
θ(t) = arctan
h
y(t+T )−y(t)
x(t+T )−x(t)
i
(3)
Another difference for the Trajectory Tracking is how
the MPC cost function is calculated. The cost func-
tion now takes an account not only a reference point
but rather a vector containing N points (remember
that N is the prediction horizon size). This approach
so brings better results once the controller can “see”
CLOSER 2021 - 11th International Conference on Cloud Computing and Services Science
300
-10 -5 0 5 10
x (m)
-10
-5
0
5
10
y (m)
(a) Trajectory in Point Stabilization
3G
4G
5G
200msPL50%
0 5 10 15 20 25 30
time (s)
-1
-0.5
0
0.5
1
Control Signal
(b) 3G
u
v
(m/s) u (rad/s)
0 5 10 15 20 25 30
time (s)
-1
-0.5
0
0.5
1
Control Signal
(c) 4G
0 5 10 15 20 25 30
time (s)
-1
-0.5
0
0.5
1
Control Signal
(d) 5G
0 5 10 15 20 25 30
time (s)
-1
-0.5
0
0.5
1
Control Signal
(e) 200msPL50%
Figure 3: Point stabilization results for all the network profiles: (a) Trajectory of the robot, (b)–(e) Control signals.
the future trajectory and suitably calculate the control
signal sequence. On the other hand, the processing
time increases. The prediction horizon was reduced to
N = 30, and the controller time step and sensor sam-
pling period were increased to T = 80 ms to reduce
the impact of that. One exception was considered for
the simulation’s prediction horizon size with the 5G
profile, adjusted to N = 20, as the network conditions
are much more favorable. In this case, the controller’s
advancing into the future can be smaller, reducing the
MPC processing time.
For both trajectory shapes in all the network
profiles, the Q weights were adjusted to Q =
diag(30,30,0.2), except in the 200msPL50% profile,
where it was adjusted to Q = diag(40,40,0.2). For
the circular-shape, the R weight was set as R =
diag(50,50) in all the simulations. In case of the
eight-shape, the R diagonal matrix received the val-
ues R = diag(10,5) for the three first profiles and R =
diag(20,20) for the 200msPL50% profile.
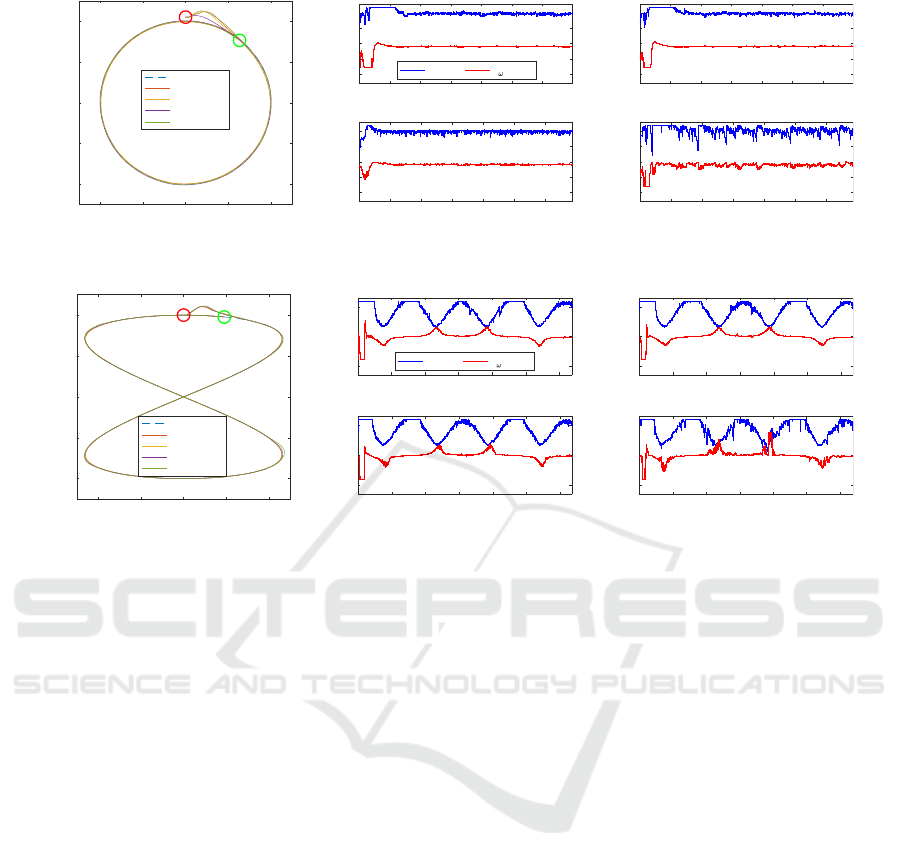
The trajectory of the robot for the circular-shape
and all network profiles, can be seen in Figure 4(a),
whereas the controls signals are depicted in Fig-
ure 4(b) to 4(e). The red circle delimits the re-
gion of the initial state, denoted by the vector
x
0
= [0 10.5 0]
T
. The initial state is outside the circu-
lar perimeter; however, the controller quickly moves
the robot to the reference trajectory, even more in the
5G profile. The robot completes the trajectory in the
clockwise direction and starts a new lap, but immedi-
ately stops in the region delimited by the green cir-
cle. The simulation was programmed to end after
70 s, time enough to complete a lap, and complete
the beginning of a new one. The same procedures
were repeated with the eight-shape, and the results
can be seen in Figure 5. In this case, the initial state is
x
0
= [0 10 0]
T
and the simulation time was adjusted
to 130 s.
The circular-shape trajectory is smoother and eas-
ier to follow, as maintaining constant the linear and
angular speeds are enough to keep the robot in the
reference trajectory. Oppositely, in the eight-shape,
the controller should continuously make changes in
the linear and angular speeds. Nevertheless, even in
bad network conditions, the trajectory is successfully
followed and are very similar for all the network pro-
files. As expected, Trajectory Tracking has better re-
sults because the controller considers the future tra-
jectory to generate the control sequence. Therefore,
even if the packets forwarded to the local side are de-
layed or lost, the MPC’s predictive nature can gen-
erate a control sequence exploited by the actuator to
keep the robot in the desired reference.
If a path planner is adopted, the planned path can
be provided to the MPC and the Trajectory Tracking
method can be used. In the same way, the actuator in
the local side will be able to make the compensations
when necessary and track the robot in the planed path.
5 CONCLUSIONS
This paper introduced an experimental setup of a sys-
tem for compensation of delays and packet loss in
communication networks. In the proposed system,
Edge computing supports the MPC execution to con-
trol a mobile robot. The actuator uses the control se-
quence generated by the MPC, within the prediction
horizon to compensate. We implemented two control
objectives: Point Stabilization and Trajectory Track-
ing. In the first, the robot should leave from an ini-
tial state and reach the reference. The second repre-
sents this work’s main contribution since the future
trajectory points are included in the MPC optimiza-
tion problem. The control sequence is, in this case,
generated according to the future trajectory. The ac-
tuator takes advantage of the last received control se-
quence when the packets from the edge are delayed
or lost. Thus the control signals are continuously ap-
plied to the robot. The favorable conditions of the 5G
network allow the reduction of the prediction horizon,
and consequently, the MPC has a faster response.
An Approach to Reduce Network Effects in an Industrial Control and Edge Computing Scenario
301
-10 -5 0 5 10
x (m)
-10
-5
0
5
10
y (m)
(a) Trajectory Tracking - Circular-shape
Reference
3G
4G
5G
200msPL50%
0 10 20 30 40 50 60
time (s)
-1
-0.5
0
0.5
1
Control Signal
(b) 3G
u
v
(m/s) u (rad/s)
0 10 20 30 40 50 60
time (s)
-1
-0.5
0
0.5
1
Control Signal
(c) 4G
0 10 20 30 40 50 60
time (s)
-1
-0.5
0
0.5
1
Control Signal
(d) 5G
0 10 20 30 40 50 60
time (s)
-1
-0.5
0
0.5
1
Control Signal
(e) 200msPL50%
Figure 4: Circular-shape results for all the network profiles: (a) Trajectory of the robot, (b)–(e) Control signals.
-10 -5 0 5 10
x (m)
-10
-5
0
5
10
y (m)
(a) Trajectory Tracking - Eight Shape
Reference
3G
4G
5G
200msPL50%
0 20 40 60 80 100 120
time (s)
-1
0
1
Control Signal
(b) 3G
u
v
(m/s) u (rad/s)
0 20 40 60 80 100 120
time (s)
-1
0
1
Control Signal
(c) 4G
0 20 40 60 80 100 120
time (s)
-1
0
1
Control Signal
(d) 5G
0 20 40 60 80 100 120
time (s)
-1
0
1
Control Signal
(e) 200msPL50%
Figure 5: Eight-shape results for all the network profiles: (a) Trajectory of the robot, (b)–(e) Control signals.
The next steps may comprise a more realistic scenario
of Industry 4.0, including multiple AGV’s using path
planning, including autonomous interactions between
AGV’s and other actors of the manufacturing pro-
cess. The use of Edge Computing may support those
mentioned tasks, but also other relevant ones, like,
change the parameters of the controller according to
the load characteristics (e.g., dimensions, weight, and
fragility), promote the cooperation among multiple
AGV’s to transport a heavier load, use Artificial Intel-
ligence to help on the decision-making and other tasks
that requires more computing power. Edge Comput-
ing also helps to reduce the cost with the robots and
all devices and machinery related to the industrial en-
vironment, given that the computing power will be
placed at the edge, besides, the battery consumption
of the mobile robots may be reduced.
ACKNOWLEDGEMENTS
The authors thank the support of the Coordenac¸
˜
ao
de Aperfeic¸oamento de Pessoal de N
´
ıvel Superior -
Brazil (CAPES), and Programa de P
´
os-Graduac¸
˜
ao em
Engenharia El
´
etrica (COPELE), Federal University of
Campina Grande.
REFERENCES
Aazam, M., Zeadally, S., and Harras, K. A. (2018). De-
ploying fog computing in industrial internet of things
and industry 4.0. IEEE Transactions on Industrial In-
formatics, 14(10):4674–4682.
Abbas, N., Zhang, Y., Taherkordi, A., and Skeie, T. (2018).
Mobile edge computing: A survey. IEEE Internet of
Things Journal, 5(1):450–465.
Abdelzaher, T., Hao, Y., Jayarajah, K., Misra, A., Skarin, P.,
Yao, S., Weerakoon, D., and
˚
Arz
´
en, K.-E. (2020). Five
challenges in cloud-enabled intelligence and control.
ACM Trans. Internet Technol., 20(1).
Al-Fuqaha, A., Guizani, M., Mohammadi, M., Aledhari,
M., and Ayyash, M. (2015). Internet of things: A
survey on enabling technologies, protocols, and ap-
plications. IEEE Communications Surveys Tutorials,
17(4):2347–2376.
Andersson, J. A. E., Gillis, J., Horn, G., Rawlings, J. B.,
and Diehl, M. (2019). CasADi: a software framework
for nonlinear optimization and optimal control. Math-
ematical Programming Computation, 11(1):1–36.
Bemporad, A. and Morari, M. (1999). Robust model predic-
tive control: A survey. In Garulli, A. and Tesi, A., ed-
itors, Robustness in identification and control, pages
207–226, London. Springer London.
Chen, B., Wan, J., Celesti, A., Li, D., Abbas, H., and Zhang,
Q. (2018). Edge computing in iot-based manufac-
turing. IEEE Communications Magazine, 56(9):103–
109.
Chen, C., Lyu, L., Zhu, S., and Guan, X. (2020). On-
CLOSER 2021 - 11th International Conference on Cloud Computing and Services Science
302

demand transmission for edge-assisted remote control
in industrial network systems. IEEE Transactions on
Industrial Informatics, 16(7):4842–4854.
Dongbing Gu and Huosheng Hu (2006). Receding
horizon tracking control of wheeled mobile robots.
IEEE Transactions on Control Systems Technology,
14(4):743–749.
Esen, H., Adachi, M., Bernardini, D., Bemporad, A., Rost,
D., and Knodel, J. (2015). Control as a service
(caas): Cloud-based software architecture for automo-
tive control applications. In Proceedings of the Second
International Workshop on the Swarm at the Edge of
the Cloud, page 13–18, New York, NY, USA.
Findeisen, R. and Varutti, P. (2009). Stabilizing Nonlinear
Predictive Control over Nondeterministic Communi-
cation Networks, pages 167–179. Springer Berlin Hei-
delberg, Berlin, Heidelberg.
Gr
¨
une, L., Allg
¨
ower, F., Findeisen, R., Fischer, J., Groß, D.,
Hanebeck, U. D., Kern, B., M
¨
uller, M. A., Pannek, J.,
Reble, M., Stursberg, O., Varutti, P., and Worthmann,
K. (2014). Distributed and Networked Model Predic-
tive Control, pages 111–167. Springer International
Publishing, Heidelberg.
Gubbi, J., Buyya, R., Marusic, S., and Palaniswami, M.
(2013). Internet of things (iot): A vision, architectural
elements, and future directions. Future Generation
Computer Systems, 29(7):1645 – 1660.
Hegazy, T. and Hefeeda, M. (2015). Industrial automation
as a cloud service. IEEE Transactions on Parallel and
Distributed Systems, 26(10):2750–2763.
Hespanha, J. P., Naghshtabrizi, P., and Xu, Y. (2007). A
survey of recent results in networked control systems.
Proceedings of the IEEE, 95(1):138–162.
Hojjat A. Izadi, B. W. G. and Zhang, Y. (2011). Decentral-
ized model predictive control for cooperative multiple
vehicles subject to communication loss. International
Journal of Aerospace Engineering, 2011:1–13.
Kaur, K., Garg, S., Aujla, G. S., Kumar, N., Rodrigues, J. J.
P. C., and Guizani, M. (2018). Edge computing in the
industrial internet of things environment: Software-
defined-networks-based edge-cloud interplay. IEEE
Communications Magazine, 56(2):44–51.
Kiani, A. and Ansari, N. (2018). Edge computing aware
noma for 5g networks. IEEE Internet of Things Jour-
nal, 5(2):1299–1306.
Liu, G., Xia, Y., Chen, J., Rees, D., and Hu, W. (2007).
Networked predictive control of systems with random
network delays in both forward and feedback chan-
nels. IEEE Transactions on Industrial Electronics,
54(3):1282–1297.
Mayne, D., Rawlings, J., Rao, C., and Scokaert, P. (2000).
Constrained model predictive control: Stability and
optimality. Automatica, 36(6):789 – 814.
Mehrez, M. W., Mann, G. K. I., and Gosine, R. G. (2013).
Stabilizing nmpc of wheeled mobile robots using
open-source real-time software. In 2013 16th Inter-
national Conference on Advanced Robotics (ICAR),
pages 1–6.
Pallasch, C., Wein, S., Hoffmann, N., Obdenbusch, M.,
Buchner, T., Waltl, J., and Brecher, C. (2018). Edge
powered industrial control: Concept for combining
cloud and automation technologies. In 2018 IEEE In-
ternational Conference on Edge Computing (EDGE),
pages 130–134.
Pin, G. and Parisini, T. (2011). Networked predictive con-
trol of uncertain constrained nonlinear systems: Re-
cursive feasibility and input-to-state stability analysis.
IEEE Transactions on Automatic Control, 56(1):72–
87.
Qiu, T., Chi, J., Zhou, X., Ning, Z., Atiquzzaman, M.,
and Wu, D. O. (2020). Edge computing in indus-
trial internet of things: Architecture, advances and
challenges. IEEE Communications Surveys Tutorials,
22(4):2462–2488.
Rimal, B. P., Van, D. P., and Maier, M. (2017). Mobile
edge computing empowered fiber-wireless access net-
works in the 5g era. IEEE Communications Magazine,
55(2):192–200.
Rohmer, E., Singh, S. P. N., and Freese, M. (2013). V-rep:
A versatile and scalable robot simulation framework.
In 2013 IEEE/RSJ International Conference on Intel-
ligent Robots and Systems, pages 1321–1326.
Sisinni, E., Saifullah, A., Han, S., Jennehag, U., and Gid-
lund, M. (2018). Industrial internet of things: Chal-
lenges, opportunities, and directions. IEEE Transac-
tions on Industrial Informatics, 14(11):4724–4734.
Skarin, P., Eker, J., Kihl, M., and
˚
Arz
´
en, K.-E. (2019).
Cloud-assisted model predictive control. In 2019
IEEE International Conference on Edge Computing
(EDGE), pages 110–112.
Skarin, P., T
¨
arneberg, W.,
˚
Arzen, K., and Kihl, M. (2018).
Towards mission-critical control at the edge and over
5g. In 2018 IEEE International Conference on Edge
Computing (EDGE), pages 50–57.
Trevisan, M., Safari Khatouni, A., and Giordano, D. (2020).
ERRANT: Realistic emulation of radio access net-
works. Computer Networks, 176:107289.
Ulusoy, A., Gurbuz, O., and Onat, A. (2011). Wire-
less model-based predictive networked control system
over cooperative wireless network. IEEE Transactions
on Industrial Informatics, 7(1):41–51.
Vick, A., Guhl, J., and Kr
¨
uger, J. (2016). Model predic-
tive control as a service — concept and architecture
for use in cloud-based robot control. In 2016 21st
International Conference on Methods and Models in
Automation and Robotics (MMAR), pages 607–612.
Wan, J., Tang, S., Shu, Z., Li, D., Wang, S., Imran, M., and
Vasilakos, A. V. (2016). Software-defined industrial
internet of things in the context of industry 4.0. IEEE
Sensors Journal, 16(20):7373–7380.
Xu, H., Yu, W., Griffith, D., and Golmie, N. (2018). A sur-
vey on industrial internet of things: A cyber-physical
systems perspective. IEEE Access, 6:78238–78259.
Yaqoob, I., Ahmed, E., Hashem, I. A. T., Ahmed, A. I. A.,
Gani, A., Imran, M., and Guizani, M. (2017). Internet
of things architecture: Recent advances, taxonomy,
requirements, and open challenges. IEEE Wireless
Communications, 24(3):10–16.
Zhao, P. and D
´
an, G. (2018). A benders decomposi-
tion approach for resilient placement of virtual pro-
cess control functions in mobile edge clouds. IEEE
Transactions on Network and Service Management,
15(4):1460–1472.
An Approach to Reduce Network Effects in an Industrial Control and Edge Computing Scenario
303
