
GNSS based Adaptive Monitoring for the Assistance of Persons with
Orientation Difficulties
Martin Litzenberger
1a
, Klaus Dittrich
1
, Birgit Unger-Hrdlicka
2
, Hendrik P. Buimer
3
,
Ivan Rigamonti
4
, Wil Wintjens
5
, Matthieu Arendse
6
, Patrizia Murko
7
,
Matthias W.G. Zeller
8
and Stephanie Auer
9
1
Austrian Institute of Technology Ges. m. b. H., Giefinggasse 4, 1210 Vienna, Austria
2
CareCenter Software Ges.m.b.H., Franzosenhausweg 53, 4030 Linz, Austria
3
Vilans, Churchilllaan 11, 3527 GV Utrecht, The Netherlands
4
CREAGY AG, Baarerstrasse 2, 6301 Zug, Switzerland
5
Ivengi BV, Withuisveld 24, 6226 NV Maastricht, The Netherlands
6
Stitching TanteLouise, Postbus 73, 4600 AB Bergen op Zoom, The Netherlands
7
terzStiftung, Seestrasse 112, 8267 Berlingen, Switzerland
8
Kepler Universitätsklinikum Ges.m.b.H., Krankenhausstraße 7a, 4020 Linz, Austria
9
MAS Alzheimerhilfe, Lindaustraße 28, 4820 Bad Ischl, Austria
ivan.rigamonti@creagy.ch, wil.wintjens@ivengi.com, matthieu.arendse@tantelouise.nl
patrizia.murko@terzstiftung.ch, matthias.zeller@kepleruniklinikum.at, stefanie.auer@mas.or.at
Keywords: Geo-Fencing Technique, Safe Geo-Fence, Personal Safe Zones, Weighted Map, GNSS Position Monitoring,
Active Assisted Living Technology.
Abstract: Severe problems with out-of-home mobility are common under persons with cognitive impairment. Technical
solutions such as geo-fencing systems, based on GNSS position monitoring, exist to mitigate wandering and
getting lost of such patients. However, manually defined, fixed geo-zones effectively limit the freedom of the
person and can lead to false alarms even during normal walking behaviour. This paper presents work in
progress on a GNSS based position monitoring system that computes adaptive personalized safe zones from
the user walking routine. The system implements semi-rigid zone borders allowing the user to explore new
areas and automatically extend their personalized safe zones over time. Making use of routing services the
system can generate temporary corridors for appointments outside of the users typical walking routine. While
the technical implementation of the system is completed, it will be future work to evaluate the system's effect
on users in a field trial and a clinical study.
1 INTRODUCTION
Wandering and getting lost is one of the most
dramatic problems of persons with dementia and
Alzheimer’s disease (Yatawara, 2017). An example
would be someone who takes what would normally
be a routine walk and then suddenly is unable to find
his or her way. Sixty percent of people with
Alzheimer’s disease will wander at some point during
the progression of the disease, and half of those will
become lost and separated from a caregiver or the
responsible person (Butler, 1991). Sixty-one percent
a
https://orcid.org/0000-0002-2101-2188
of wanderers not located within the first 24 hours are
found deceased (Koester, 2008).
GPS tracking systems, often called "geo-fencing"
systems, are already used to mitigate the problem by
permanently monitoring the persons position and
alarming a carer if the person deviates from a
predefined geographic area (Milne, 2014). However,
such systems are not adaptable because they rely on
fixed predefined geographic zones, that need to be
manually defined by the care person. This can result
in frequent alarms, when a person is intentionally
exploring new regions or is visiting a friend, outside
the predefined "fence". Such situations are limiting
236
Litzenberger, M., Dittrich, K., Unger-Hrdlicka, B., Buimer, H., Rigamonti, I., Wintjens, W., Arendse, M., Murko, P., Zeller, M. and Auer, S.
GNSS based Adaptive Monitoring for the Assistance of Persons with Orientation Difficulties.
DOI: 10.5220/0010494602360243
In Proceedings of the 7th International Conference on Information and Communication Technologies for Ageing Well and e-Health (ICT4AWE 2021), pages 236-243
ISBN: 978-989-758-506-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

the freedom of the person and may cause extra worry
to the caregiver (Landau, 2012).
GPS-tracking has been used to analyse the
mobility of persons with cognitive impairment
(Shoval, 2008). Geo-fencing systems with an
additional automatic calculation of the shortest
distance of the user to the closest carer in a group of
carers has been described (Pratama, 2020) and an
extension of the geo-fencing concept to overcome the
disadvantages of the rigid "fence" including tests with
a few persons have been presented (Lin, 2018).
In this paper we report on a new concept
developed in the framework of the EU AAL joint
programme, project “FreeWalker” (freewalker-
aal.eu), which tests and validates a monitoring and
warning system based on GNSS tracking that
addresses the specific deficiencies of older adults
with dementia and frailty. The FreeWalker system
monitors typical walking routes and thereby learns
the habits of the user to automatically generate an
adaptive safe-zone around the user's home.
Furthermore, the system can generate temporary safe-
corridors from calendar entries, to allow visiting
places outside the typical walking routes. Note that,
for simplicity, the cared-for person (or primary user
in the AAL context) will be called the user, and the
supervisor or caregiver (or secondary user in the AAL
context) will be called the carer, throughout this
paper.
FreeWalker will allow persons with cognitive
impairment - or who feel otherwise insecure in the
outside environment - an increased freedom and self-
determined way of moving outside. It is aiming at
giving carers piece of mind by supporting them in
tightly monitoring the user with the FreeWalker
"Care" App for mobile devices, when needed. But
FreeWalker also empowers the user by allowing to
make own decisions, by automatically reminding him
or her on unusual situations via the FreeWalker "Go"
App, even before an alarm is issued to the carer.
In contrast to previous work on personalized safe
zones that has been evaluated on GPS-tracks of three
individuals (Lin, 2018), this project plans a pilot
operation with a total of approximately 100 users
(users and carers) in the three countries Austria,
Switzerland and The Netherlands, accompanied by a
clinical study. This paper describes work in progress
as the technical concept is finalized but a field study
to evaluate if the system can improve the situation for
user and carer, is still to be done.
The paper concentrates on the technical
description of the logic engine software component of
FreeWalker that dynamically computes the safe zones
and corridors and is organised as follows: The
following section gives an overview over the system
components and the dynamic safe zone concept.
Section 3 explains the technical implementation, the
logic engines algorithms to compute safe zones and
safe corridors, as well as executing the rules to issue
information on the state of the primary user to the care
person. Section 4 presents an outlook on the future
study and is followed by a conclusion.
2 SYSTEM DESCRIPTION
2.1 Components
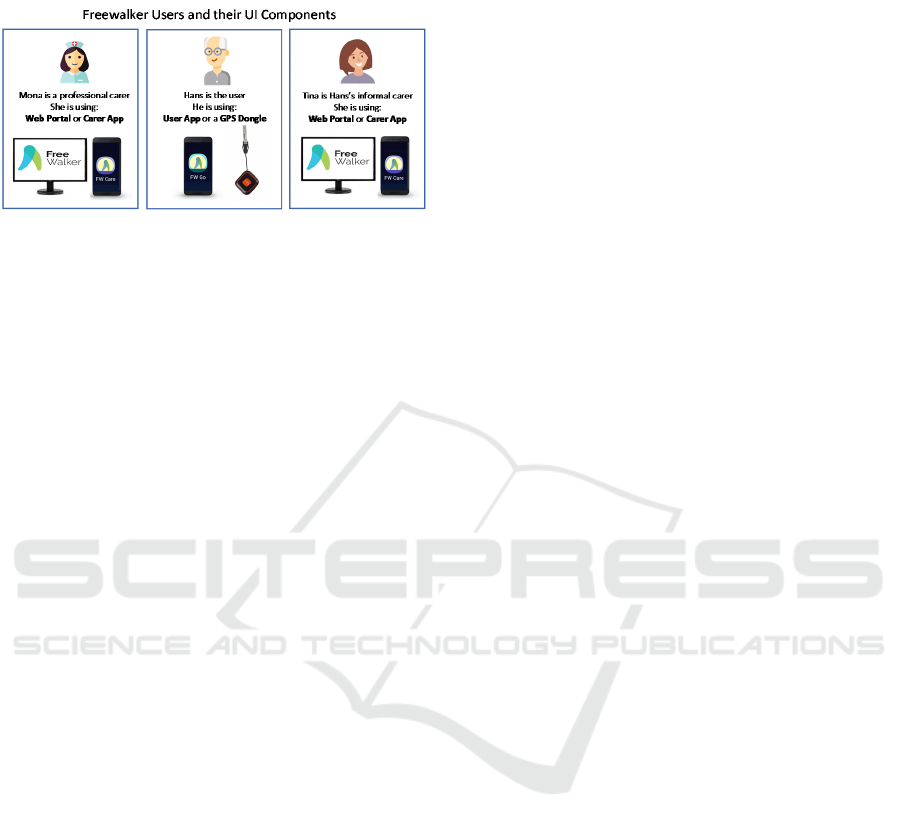
Figure 1 shows an overview over the system main UI
components that the users and carers are working
with. Four different components are integrated in the
system, that are directly interfacing to the users.
Two FreeWalker mobile applications: The user
app (named "FreeWalker GO") and carer app (named
"FreeWalker Care") have been implemented for
Android and iOS operating systems. The carer app
allows an overview of the users associated with one
carer, displaying their status as well as alarms and a
map to locate the users position in case of an alarm
(see Figure 4a and 4b).
The user app allows the user to actively send an
alarm via activating an alarm button but is also used
as a terminal to provide feedback to the user: Remind
them if he/she might have lost his or her way or might
have forgotten to go to a scheduled appointment. The
user app also constantly monitors the user position via
the smart phone GNSS receiver and sends it further
onwards to the system backend components. For
those users not capable of operating a smart phone
and mobile applications a GPS "dongle" can be used
alternatively. The GPS dongle can be worn as a
necklace or as a watch and provides an alarm button,
but automated system feedback to the user is not
possible with this option. Both, user app and GPS
dongle allow for a two-way voice communication
between carer and user in an emergency/alarm
situation.
Carers can view the user status and configure certain
system parameters in the web portal. The web portal
also allows to maintain the calendar of the user,
alternatively the calendar can be maintained by the
user via the user app. The portal also features a map
view page.
It allows to define a first, initial safe zone (see
next section) for a user by drawing with the mouse on
a map and to review the system generated safe zone
and temporary corridors to an appointment. The
history of alarms and how they have been handled by
GNSS based Adaptive Monitoring for the Assistance of Persons with Orientation Difficulties
237
the carers is also recorded and available through the
portal.
Figure 1: User roles and the system front-end components
available to them.
2.2 Dynamic Safe Zone Concept
The strength of the system and its major difference
compared to conventional "geo-fencing" approaches
comes from an automatic, periodic update of the
user's personal safe zone computed from the real-time
monitoring of the user's daily walking routines.
Figure 4b shows an example of a real life computed
safe zone in a screenshot of the carer app. The system
automatically produces two types of zones for each
user, depicted in the map as green and orange
polygons. The dynamic safe zone (or green zone as it
will be referred to in this paper) represents the
observed walking routines of the user over time. The
second exploration zone (or orange zone) surrounds
the green zone at a configurable distance (see Figure
4c). While the user can leave the green zone for an
adjustable duration without triggering an alarm (30
minutes have been defined in the co-design process),
leaving the orange zone (see Figure 4e) will initiate
an immediate alarm to the carer.
Note that one of the major differences of
FreeWalker from existing geo-fencing solutions is the
orange zone in which the user can explore without
triggering an alarm, but still his or her position is
closely monitored by the system (see Figure 4d).
This approach combines the safety of a strict geo-
fencing system with the flexibility to explore the
outside of a fixed zone and thereby extending the
green zone in consecutive walks. A moderate
extension is possible, while a sudden and large
change in walking habits indicates a potential
wandering or disorientation situation of the user.
During the exploration period the user gains
confidence in a certain area. This will empower the
user to independently walk outside and at the same
time protect him or her from getting lost. The green
and orange zone shapes are periodically re-computed
from the walking tracks of the previous day every 24
hours.
To mitigate the risk that the user is lost inside the
orange zone, e.g. walking in circles, the system
additionally monitors the time spent inside the orange
zone and raises an alarm to the carer after an
adjustable duration. To further empower the user
towards independency and self-responsibility, the
system is able to automatically ask the user via the
user app if he/she feels lost or otherwise unsafe before
the alarm is raised. Only if the user does not respond
after a further timeout, or actively asks for help, the
alarm is raised. The technical implementation details
of this logic are explained in the next section 3 of the
paper.
2.3 Safe Corridors
In addition to the periodically updated green zones
the system offers temporary safe corridors computed
from the appointments scheduled in the user's online
calendar. This allows the user to visit destinations
outside the orange zone within a predefined time
window without triggering an alarm. This corridor
extends the green zone to the destination address and
is valid only for a certain time interval on the day of
the appointment. At the same time the system
monitors the distance of the user to the destination
address and notifies the carer on late arrival or if the
user has arrived on time. Figure 4f shows a typical
corridor in a screenshot of the carer app.
It must be pointed out however, that the system
does not offer navigation functionality to the user, but
solely monitors the progress to, and on-time arrival at
the destination address.
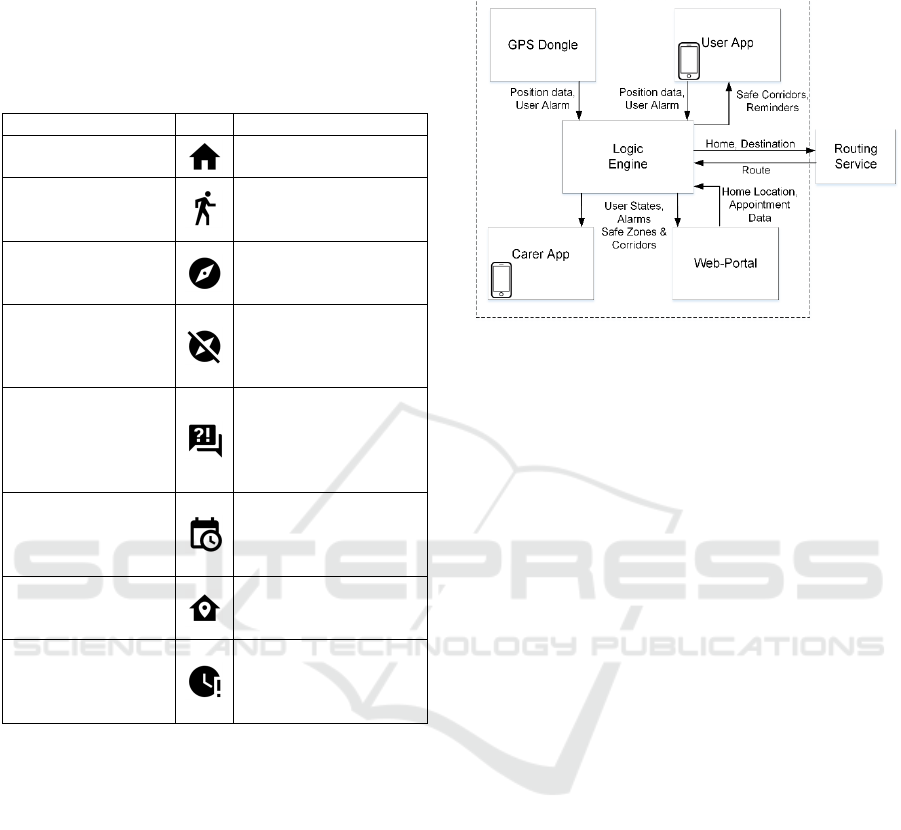
2.4 User States
The status of the user is computed by the logic engine
component, one of the system backends (see Figure
2), from user position, zones and timing and is
communicated to the carer via the web portal and
carer app, using so called user state icons. Different
user states indicate clearly to the carer in what
situation the user currently is. Table 1 gives an
overview of the states related to the user position and
the zone concept. There are more states defined,
related to important system conditions such as
"battery low", but as this paper focuses on the safe
zone concept, these states are not discussed here.
Some of the states will be displayed to the carer
for information only, other states will be
accompanied by an alarm (e.g. "OutOfZone") that
must then be handled by the carer and is further
ICT4AWE 2021 - 7th International Conference on Information and Communication Technologies for Ageing Well and e-Health
238
documented by the system. However, as this paper
focuses on the presentation of the dynamic zone
concept, the alarming and alarm handling logic of the
system are not detailed further in this paper.
Table 1: List of states related to the user position and
dynamic zone concept.
State Name Icon Description
Close2Home
The user is very near to
his/her home address
Outside
The user is in the green
zone, his/her usual
walking habit
ExploringZone
The user is in the
orange zone, exploring
the surroundings
OutOfZone
The user is outside of
the green and orange
zone, potentially
lost/wandering
IsReminded
The user is too long
exploring in the orange
zone, potentially
lost/wandering and is
reminded to return
AppointmentInProgress
A scheduled
appointment is due and
a safe corridor to the
appointment is active.
Close2Appointment
The user is close to the
due appointment
destination
LateForAppointment
The appointment is
due, but the user is far
from the appointment
destination
3 IMPLEMENTATION
In this section the system’s approach of green and
orange user-specific zones and states is explained. An
overview of the complete process done in the logic
engine backend from mapping the locations, finding
contours and zones to the evaluation of rules is
presented.
3.1 Location Mapping
Position data is received by the logic engine backend
(see Figure 2) and converted to corresponding pixel-
coordinates in a user-individual weighted map. Each
weighted map pixel is connected to an area on earth
in the WGS84 reference system while the centre is the
position of a user’s home location.
The following two points determined the choice
of map parameters:
Figure 2: System architecture with the user and carer apps
and web-portal front end and the logic engine backend and
the interfaces.
(1) The size of a weighted map is proportional to
the size of each pixel if the resolution stays constant.
Bigger pixels result in more edge-shaped zones which
is not consistent with the frontend-requirements.
(2) A higher resolution therefore results in higher
server workload which led to processing time
problems with a high number of system users.
For these two reasons, the size and resolution of a
weighted map were set to 10x10km
2
and 1000x1000
pixels.
To avoid trapezoid map shapes due to the
curvature of earth, geolocations of the weighted map
centre with values above 80° and below -80° latitude
are not allowed. Each element of the weighted map
can contain weights between 0.0 and 1.0. The lower
the value the longer the walked route lies in the past
(see Figure 3a). Due to a low transmission frequency
in relation to the walking speed the pixels must be
interpolated between the current and the last position
to obtain a continuous line of weighted pixels. The
walked routes have an adjustable width to achieve a
zone size customized to common movement patterns.
If on the one hand the width is chosen too small, it
leads to narrow zone areas when walking back and
forth on the same street which can easily activate an
alarm by receiving a GNSS signal just below the filter
threshold. On the other hand, a high value will make
areas accessible the user should not go to. The value
was set to two times the GNSS filter threshold of 30m
plus 10m additional space which is a width of 70m.
To adapt to behaviour changes a linear decay
algorithm is implemented to “forget” routes that have
not been walked for a specified duration. All weights
in a map are thereby reduced in proportion to time
GNSS based Adaptive Monitoring for the Assistance of Persons with Orientation Difficulties
239

elapsed since the last entered location with a cap of
0.0 at the lower end (no negative weights are
possible).
𝑤
=𝑤
−0.5∗
(1)
𝑤
is considered the weight before the decay is
applied and 𝑤
is the weight after the subtraction.
The denominator in the fraction part 𝑡
is the time
elapsed since the last entered location and the
nominator 𝑡
is an adjustable value which
specifies after what time period the starting weight of
1.0 is reduced by 0.5. For the planned study 𝑡
was set to 604.800s which corresponds to a duration
of seven days. Consequently, routes older than 14
days will not be considered anymore in the zone
creation process.
3.2 Zone Generation
In contrast to (Lin, 2018) the safe zone generation in
this paper is based on the weighted map data
described in section 3.1. To create a zone, state of the
art segmentation and contour algorithms provided by
the open source libraries OpenCV and SciPy are used.
Figure 3a shows a heatmap visualization of a
weighted map recorded over several days of test
walks around the home location. The darker the
colour of an area the longer the walked route lies in
the past. Figure 3b shows the corresponding selected
contour out of all contours found. The selected
contour will then be transformed to a polygon with an
average limit of 100 support points.
Figure 3: (a) Grey scale heatmap representation of the
weighted map with walks, (b) Zone contour found in
weighted map data.
Green Zone: Is the area limited by the locations
entered in the map and always contains the home
location. This zone indicates a save area where the
user can move freely.
Orange Zone: An orange zone is created by
applying a binary dilation algorithm on the data
shown in Figure 3a, which then is used as the basis
for a new contour search. The size can be changed per
user and is specified in meters distance from the
border of the previously processed green zone.
3.3 Corridor Generation
A corridor, or better described as temporary green
corridor, is a zone for special appointments outside
the 10x10km boundary depicted in section 3.1. The
system creates these time-dependant green zones with
a maximum map size of 30x30 km. This new type of
zone is only available for the appointment duration
plus estimated 90 minutes travel time before and after
the event.
To create a corridor the caregiver needs to enter
an appointment with a valid address, start time and
end time into one of the available frontends. The
appointment data is either pushed to the logic engine
directly or queried from the portal every 24 hours for
the appointments of the next day. The logic engine
then computes this data by requesting up to three
different routes from Google maps service with start
address at the user’s home location and end address
at the appointment’s location. These routes of
geolocations are point-wise transformed to pixel
coordinates and entered into an empty weighted map
with a corridor specific width. Because all routes have
the same starting and end point an enclosing polygon
is therefore created and detected by the same contour-
finding algorithms used in the zone creation
procedure in section 3.2. Finally, the contour is down
sampled and sent to the frontends.
3.4 Rule Engine
Interpretation of the current state of a user based on
his/her position is done in a two-step process:
Step 1:
User specific properties are updated, triggered by
each received geolocation. The properties are
classified into three different subjects:
Zone-Properties: These values define the current
state of a received location in regard to all colored
zones available for this user.
Example: location is in green/orange/red zone
(false/true), distance to home location (in meters)
Timestamps: The timestamps indicate when a
zone was left and when a zone was entered.
Appointment-Properties: The appointment
properties describe the current ongoing user-specific
appointment task.
ICT4AWE 2021 - 7th International Conference on Information and Communication Technologies for Ageing Well and e-Health
240
Example: the distance to the appointment (in
meters), ongoing appointment (false/true).
Example: timestamp entered green zone
(seconds), timestamp left orange zone (seconds).
Step 2:
Properties are interpreted by rules which directly
define the status of a person. This is achieved by
setting status-specific conditions for all relevant
properties. All active rules are processed once per
minute for every active user in the system, regardless
if a location was received or not.
This provides up-to-date state information for all
users. Table 2 shows an example rule for the user state
“Close2Home”. In the left column the code line and
on the right the corresponding explanation is given.
All conditions need to evaluate as true to send the
defined user state to the system’s frontends.
Table 2: Code lines of an example rule.
CODE EXPLANATION
time_now -
last_loc_ts < 60
Last received location
timestamp must not be
older than 60 minutes
dist2home < 100
The distance to home
location needs to be less
than 100m
in_green == 1
Last location needs to be
inside a green zone
in_orange == 1
Last location needs to be
inside an orange zone
in_red == 0
Last location must not be
inside a red zone
state_to_set:
Close2Home
State to set by this rule
4 FUTURE WORK
The FreeWalker system's technical components have
been developed and tested by November 2020 and
will be piloted in a field trial, accompanied by a
clinical study.
4.1 Study Design
The study is designed as an open labelled,
randomized, controlled, parallel study with a
voluntary extension phase and will be conducted in
three countries Austria, Switzerland and The
Netherlands. The study will include both, users who
live at home and users who are living in nursing
homes with a focus on people with dementia. Study
participants will be randomized in a 2:1 ratio into the
intervention (FreeWalker, either Android
Smartphone App or a GPS dongle) or control (GPS
dongle with passive tracking only) arm using a pre-
defined, country specific, block randomization list.
Carers or contact persons of the users in the
intervention group will be using the FreeWalker carer
app based or the FreeWalker web portal.
Pre-screening of eligible candidates has started in
fall 2020. The core study duration is set to 16 weeks,
where the first study participants in Switzerland have
started to use the system in December 2020. The
voluntary extension is planned to terminate at latest
end of June 2021.
After the pre-screening phase, to select eligible
candidates, potential users will be evaluated for
fulfilment of inclusion and exclusion criteria. After
successful study inclusion, users will be randomized
to the intervention or control arm of the study and
users will be enrolled into the study. The enrolment
phase of the study was expected to span two months
but is currently behind schedule because of the
outbreak of the Covid-19 virus. Carers and users will
receive specific training in the operation of
FreeWalker or the GPS dongle from the care
organisations they are associated with.
After study enrolment the first study visit will be
conducted during which demographic data, health-
related data, etc. will be recorded and baseline
outcome measurements will be assessed. Eight weeks
into the core study phase a first follow up visit
(second visit) will be performed and outcome
measurements will be assessed for each user. After
completion of the 16-weeks core study phase, a third
study visit will be conducted, and outcome
measurements will be assessed. If the user volunteers
to participate in the study extension, he or she will
receive FreeWalker regardless of the initial study
assignment and additional training in the use of
FreeWalker if needed. At the end of the extension
phase, or if the user decides to terminate his or her
participation in the extension phase a fourth,
voluntary study visit will be conducted, and outcome
measurements will be assessed a last time. At the end
of the study, users are asked to return FreeWalker or
the GPS tracker. No further follow-up visits are
planned after the end of the study.
The primary outcome measurements of the study
are whether FreeWalker increases independence and
feeling of safety of the user and decreases worrying
of the carer about the whereabouts and safety of the
user. Outcome will be measured on a 5-point Likert
Scale created specifically for this field trial and
changes in the average sum will be assessed.
GNSS based Adaptive Monitoring for the Assistance of Persons with Orientation Difficulties
241

Figure 4: Example screenshots of the carer app in various situations of usage. (a) Dashboard overview of all users with current
states and alarms, (b) map view showing the current active user states and the dynamic ‚green‘ safe zone and ‚orange‘
exploration zone. Typical display for different user states on the map: (c) User is close to his/her home, (d) user is in the
‚exploring‘ state, (e) user is out-of-zone alarm, (f) a safe corridor to an appointment extending beyond the exploration zone.
Note that, for privacy reasons, the user position is only shown in case of an alarm and is visible here in (c)-(d) only in the test
version of the carer app.
4.2 Ethics
Permanent tracking of a person poses an inherent risk
of violating someone's privacy and thereby a fair
balance between safety of the person with cognitive
impairment and monitoring and disclosing his or her
position need to be found (Landau, 2012).
The FreeWalker system will acknowledge this by
providing the real-time position of the user to the
carer only in case of an alarm. In all other situations
the carer will be only informed on the general status
of the user (e.g. the user is 'Outside'), without
disclosing details unnecessary to understand the
situation. Furthermore, the user, if still capable of
operating a smart phone and using the user app, will
be notified on a potentially abnormal situation in a
first step by the system. Only after this step, the carer
will be informed in a next step. It is expected that this
ICT4AWE 2021 - 7th International Conference on Information and Communication Technologies for Ageing Well and e-Health
242

will result in an increased freedom and self-
determined way of moving outside.
Study participants assigned to the control group
will naturally face a disadvantage to those assigned to
the intervention group. To allow all study subjects to
use FreeWalker we will offer a voluntary extension
phase starting after the core study phase during which
all study subjects are eligible to be switched over into
the intervention group regardless of their initial group
assignment. The study design has been approved by
the ethical commissions of all three test countries.
5 CONCLUSIONS
We have presented work in progress on an adaptive,
dynamic geo-fencing solution to improve the safety
of persons with dementia and frailty in the outside
environment. The "FreeWalker" system is capable of
computing personalized safe zones by monitoring the
typical daily walking behaviour of the user with a
GNSS dongle or smart phone app, to mitigate
wandering and getting lost. Temporary safe corridors
to appointment destinations are automatically
computed from the online calendar of the user.
The system computes the personalized safe zones
using a weighted map of the users walking
trajectories from GNSS data and periodically updates
the safe zone every 24 hours. Safe corridors are
generated from queries to the Google map API
composed of three alternative walking routes from the
user’s home to an appointment destination. The
corridors are activated during the time of the
appointment only and the progress of the user to the
destination is monitored and abnormal situations are
detected.
In addition, the user will be notified on a
potentially abnormal situation in a first step by the
system via the smart-phone app. Only after this step,
if the user does not respond or actively ask for help,
the carer will be alarmed in the next step. It is
expected that this concept will lead to an increased
freedom and self-determined way of moving outside
compared to existing "fixed zone" geo-fencing
systems.
After the completion of the technical development
in fall 2020, future work is to perform a clinical study
on the beneficial effects of the system on its users.
The study is planned with approximately 100
participants in Austria, Switzerland and The
Netherlands, started in December 2020 and is planned
to be completed in June 2021, to analyse the
difference in outdoor movement behaviour of persons
with and without the system.
ACKNOWLEDGEMENTS
This project has received funding from the EU via the
AAL Joint Programme under contract no. AAL-2017-
057, the Austrian Research Promotion Agency
(FFG), the Austrian Federal Ministry for Climate
Action, Environment, Energy, Mobility, Innovation
and Technology (BMK), The Netherlands
Organisation for Health Research and Development
(ZonMw) and the Swiss Innovation Agency -
Innosuisse.
REFERENCES
Yatawara, C., Lee, D. R., Lim, L., Zhou, J., & Kandiah, N.,
2017. Getting Lost Behavior in Patients with Mild
Alzheimer’s Disease: A Cognitive and Anatomical
Model. Frontiers in Medicine, 4, 201.
https://doi.org/10.3389/fmed.2017.00201
Koester R.J., 2008. Lost Person Behavior: A Search and
Rescue, Charlottesville, Virginia: dbS Productions LLC
Butler, J. P. & Barnett, C. A., 1991. Window of wandering
Geriatr Nurs 12, 226–227.
Milne, H., van der Pol, M., McCloughan, L., Hanley, J.,
Mead, G., Starr, J., Sheikh, A., & McKinstry, B., 2014.
The use of global positional satellite location in
dementia: A feasibility study for a randomised
controlled trial. BMC Psychiatry, 14(1).
https://doi.org/10.1186/1471-244X-14-160
Shoval, N., Auslander, G. K., Freytag, T., Landau, R.,
Oswald, F., Seidl, U., Wahl, H.-W., Werner, S., &
Heinik, J., 2008. The use of advanced tracking
technologies for the analysis of mobility in Alzheimer’s
disease and related cognitive diseases. BMC Geriatrics,
8(1), 7. https://doi.org/10.1186/1471-2318-8-7
Landau, R., & Werner, S., 2012. Ethical aspects of using
GPS for tracking people with dementia:
Recommendations for practice. International
Psychogeriatrics, 24(3), 358–366. https://doi.org/
10.1017/ S1041610211001888
Lin, Q., Liu, X., & Wang, W., 2018. GPS Trajectories
Based Personalized Safe Geofence for Elders with
Dementia. 2018 IEEE SmartWorld, Ubiquitous
Intelligence & Computing, Advanced & Trusted
Computing, Scalable Computing & Communications,
Cloud & Big Data Computing, Internet of People and
Smart City Innovation (SmartWorld/SCALCOM/UIC/
ATC/CBDCom/IOP/SCI), 505–514. https://doi.org/
10.1109/SmartWorld.2018.00111
Pratama, E. R., Renaldi, F., Umbara, F. R., & Djamal, E. C.,
2020. Geofencing Technology in Monitoring of Geriatric
Patients Suffering from Dementia and Alzheimer. 2020
3rd International Conference on Computer and
Informatics Engineering (IC2IE), 106–111.
https://doi.org/10.1109/IC2IE50715.2020.9274637
GNSS based Adaptive Monitoring for the Assistance of Persons with Orientation Difficulties
243
