
Pixel Invisibility: Detect Object Unseen in Color Domain
Yongxin Wang
1 a
and Duminda Wijesekera
2 b
1
Department of Computer Science, George Mason University, 4400 University Dr, Fairfax, VA 22030, U.S.A.
2
Department of Computer Science and Cyber Security Engineering, George Mason University,
4400 University Dr, Fairfax, VA 22030, U.S.A.
Keywords:
Color-thermal Image Pairs, Pixel Invisibility, Cross-modality Distillation.
Abstract:
Deep neural networks have been very successful in image recognition. In order for those results to be useful for
driving automatons require quantifiable safety guarantees during night, dusk, dawn, glare, fog, rain and snow.
In order to address this problem, we developed an algorithm that predicts a pixel-level invisibility map for color
images that does not require manual labeling - that computes the probability that a pixel/region contains objects
that are invisible in color domain, during light challenged conditions such as day, night and fog. We do so by
using a novel use of cross modality knowledge distillation from color to thermal domain using weakly-aligned
image pairs obtained during daylight and construct indicators for the pixel-level invisibility by mapping both
the color and thermal images into a shared space. Quantitative experiments show good performance of our
pixel-level invisibility masks and also the effectiveness of distilled mid-level features on object detection in
thermal imagery.
1 INTRODUCTION
Object detection in imagery has rapidly improved
since publication of large scale data sets (Deng et al.,
2009; Everingham et al., 2010; Geiger et al., 2013;
Lin et al., 2014; Yu et al., 2018) and powerful baseline
systems like two-stage detectors, Fast/Faster/Mask R-
CNN (Girshick, 2015; Ren et al., 2015; He et al.,
2017) and one-stage detectors, such as YOLO (Red-
mon et al., 2016; Redmon and Farhadi, 2017; Red-
mon and Farhadi, 2018), SSD (Liu et al., 2016), Reti-
naNet (Lin et al., 2017). One important issue in using
object detectors for driving automatons are guarantees
on high confidence to ensure that navigable regions
are free of obstructing objects during all operational
weather and lighting conditions. Failing to detect
object-free regions or provide warning signals, for ex-
ample when crossing pedestrians or vehicles can lead
to safety violations. While the performance of ob-
ject detectors is improving, they cannot be guaranteed
never to make mistakes (Rahman et al., 2019). Thus
reliable vision systems should account for knowing
when they cannot recognize objects in addition to pro-
viding high detection accuracy. Our work attempts to
address this problem by predicting a so-called pixel-
a
https://orcid.org/0000-0001-8343-4557
b
https://orcid.org/0000-0002-7122-3055
level invisibility map for color images without manual
labeling. Invisibility maps can be used by a system
to trust detected results of some regions over others
in an image or in signal warning messages sent to a
driving automation. When multiple sensors are used
to increase detection reliability, invisibility maps will
guide the sensor fusion process and improve the over-
all performance for detection.
We define an invisibility mask for one image as
the likelihood that a region or pixel contains objects
invisible in that domain. That is, the likelihood of one
pixel or region contributing to false negatives in ob-
ject detectors due to poor visibility. Regions of color
images during good daylight obtain low invisibility
scores because visible light of enough energy is re-
flected to the camera by objects on the spot. Though
dark regions of images in the night or obscure re-
gions of images in the fog will have high invisibility
scores. One straightforward approach to create invis-
ibility maps is to create a large labeled data set where
every pixel in the image is labeled with an invisibility
score - very expensive to collect. If one were to do so
by hand, human judgements for predictions about the
invisible area for an image is highly subjective, but the
detection done in software. Instead, our method pre-
dicts the invisibility score for every pixel in the im-
age without laborious human labeling by proposing
Wang, Y. and Wijesekera, D.
Pixel Invisibility: Detect Object Unseen in Color Domain.
DOI: 10.5220/0010479002010210
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 201-210
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All r ights reserved
201
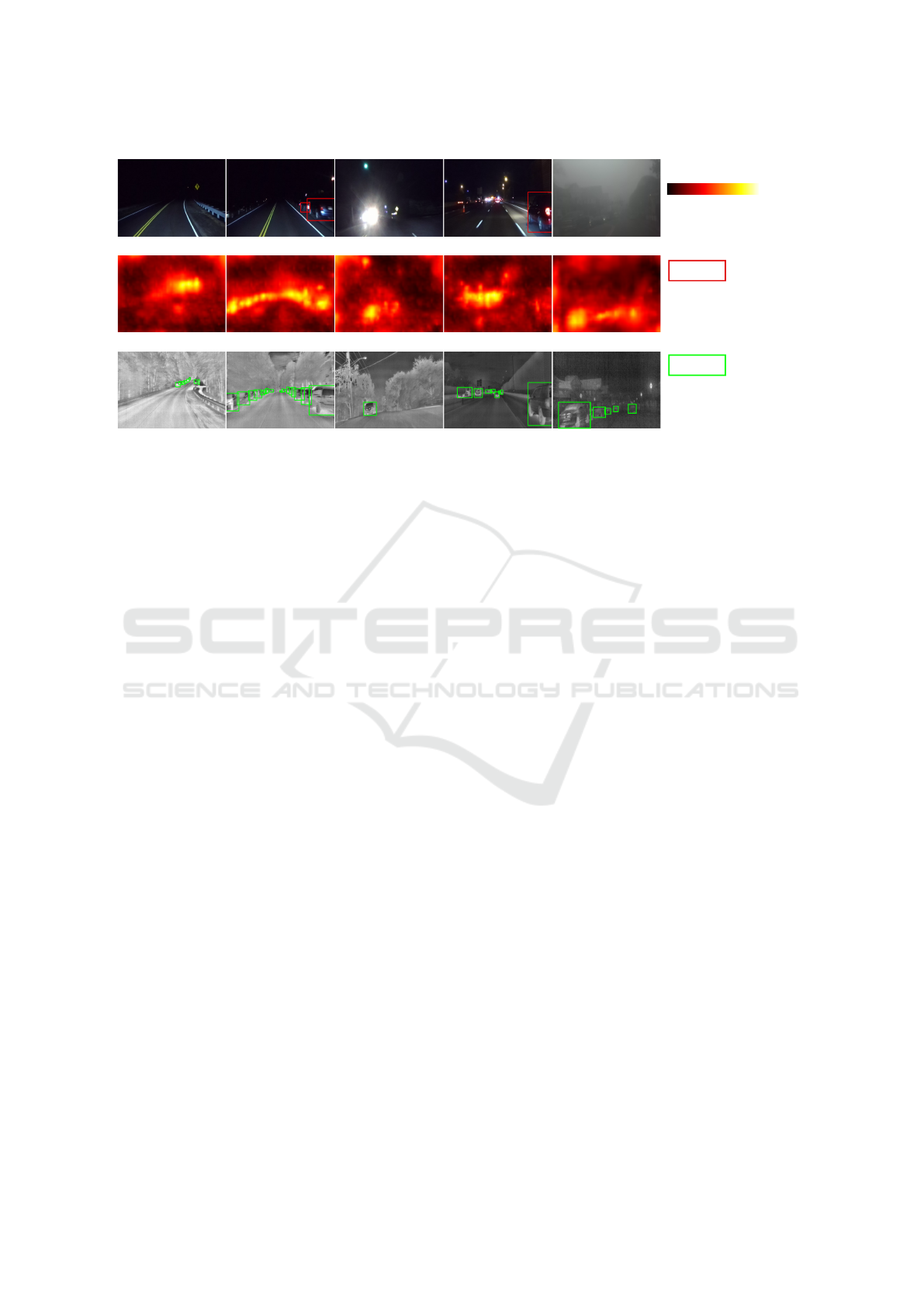
colormap hot: higher value
are to the right of the scale
detected objects
in color image
all objects shown
in paired thermal images
Color image
Pixel invisibility map
Paired thermal image
Figure 1: Our method predicts an invisibility map for each pixel (2
nd
row) given only the color image (1st row). Left to right:
It can handle distant objects, highly occluded and cluttered objects, objects with strong glare, multiple objects from complex
scenes like working zones on highways and objects in the fog. Color detectors can only detect objects (bounding boxes in 1st
row) that are visible to its spectrum, while there are many more objects in the scene (3rd row). This could cause disastrous
consequences where safety is crucial if such missed detection is trusted. Our pixel-level invisibility map indicates how much
the detection results from color images may be trusted, both for false negatives and false positives.
a novel use of cross modality knowledge distillation
and the generation of well-aligned image pairs be-
tween color and thermal images. There is a difference
between creating invisibility maps and uncertainty es-
timation for detectors; the former attempts to estimate
the sensor limitation for each pixel in the image, the
latter attempts to estimate the failure of the proposed
detector itself.
Cross modality knowledge distillation (Gupta
et al., 2016) is also called supervision transfer as
a means of avoiding labeling large scale data sets
for certain modalities. Given paired images from
two modalities, intermediate-level representations are
transferred from richly annotated color domain to
other modalities with limited labeled data sets such
as depth images (Gupta et al., 2016), sound (Aytar
et al., 2016) and thermal images. The novelty of our
invisibility mask is in mapping images from two dif-
ferent modalities into one shared space by using the
supervision transfer from color to thermal images of
the daytime and then approximating the invisibility
of color images through perceptual distances between
two modalities in challenging lighting conditions in-
cluding dusk, dawn, dark nights and fog.
Knowledge distillation (Gupta et al., 2016) re-
quires that the two modalities are presented in a
paired fashion, especially in a well-aligned manner
for object detection and for our pixel-level invisibility
masks. Here, well-aligned image pairs are the ones
where the corresponding pixels in the paired images
are located at the same positions in the respective im-
age planes. The raw image pairs captured by color
and thermal sensors have large displacements (Zhang
et al., 2019) (Li et al., 2018), which come from
(1) Internal camera attribute differences such as fo-
cal length, resolution and lens distortion, (2) Exter-
nal transformations like pose differences and (3) Time
differences from exposure time and shutter speed. We
address the first two disparities by image registra-
tion using a known pattern board, while we propose
Alignment Generative Adversarial Network (Align-
GAN) to alleviate the remaining displacements.
The contributions of our work is three fold; (1)
To the best of our knowledge, this is the first work
to generate pixel-level invisibility masks for color im-
ages without manual labeling, hence contributing to-
wards the failure detection problem caused by sensory
false negatives in autonomous driving. (2) The direct
transfer of mid-level representations from color im-
age to thermal image gets promising detection accu-
racy in thermal domain. (3) Mitigating misalignment
problems (AlignGAN) present in color-thermal pairs.
Extensive experiments are conducted to quantitatively
evaluate the performance of our system.
2 RELATED WORK
Our pixel-level invisibility mask is connected with the
task of uncertainty estimation (Gal and Ghahramani,
2016) (Gal, 2016) (Blundell et al., 2015) (Kendall
et al., 2015) (Kendall and Gal, 2017), failure detec-
tion (Daftry et al., 2016) (Zhang et al., 2014) (Hecker
et al., 2018) (Ramanagopal et al., 2018) (Kuhn et al.,
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
202

2020) (Corbi
`
ere et al., 2019) and out-of-distribution
detection (DeVries and Taylor, 2018) (Hendrycks and
Gimpel, 2016) (Liang et al., 2017) (Lee et al., 2017).
Most reported works either consider raw sensor data
as introspective inspection (Daftry et al., 2016), es-
timate the uncertainty of model-based classifiers or
compute a confidence score or a binary decision. Our
system differs from them by (1) Estimate the confi-
dence of the sensor itself from an outsider’s view-
point, which is the thermal camera; (2) Predicting a
confidence probability for every pixel in the image.
Pixel objectiveness (Jain et al., 2017) is the first
work to compute pixel-level masks for all object-like
regions. (Rahman et al., 2019) proposes a failure de-
tection system for traffic signs where excited regions
are extracted from feature maps in object detectors
to narrow down both the manual labeling space and
searching space for false negatives. Though they still
need to label the excited regions as false negatives
or true negatives. Our work also predicts pixel-level
masks for all regions of potentially invisible objects
(false negatives) in color images. In contrast, our
method doesn’t require any manual labeling of the in-
visible regions, and instead color-thermal image pairs
are utilized to provide such supervision.
In order to get aligned color thermal image pairs,
(Hwang et al., 2015) created KAIST Multispectral
Pedestrian Dataset based on a beam splitter to split
a beam of light in two for color and thermal cam-
eras. Though image pairs in the data set were ob-
served to have distinct displacements (Zhang et al.,
2019) (Li et al., 2018) and also were affected more
during night because of the intensity decay of the
beam splitter. (Choi et al., 2018) reports less severe
disparity problems, though their data sets are not re-
leased yet. We observe the same problem in our data
set which we collected using the setup of vertically
aligned cameras and propose AlignGAN to mitigate
such displacements in image planes. The most rele-
vant work to ours is performed at the same time inde-
pendently by (Vertens et al., 2020). They made simi-
lar attempts to create color and thermal image pairs
data set called Freiburg Thermal dataset and apply
cross modality distillation from color to thermal do-
main. Though our data set are mainly created for esti-
mating the sensor limitation of color cameras and thus
containing a lot of invisible objects in color domain,
while theirs targets at the task of semantic segmenta-
tion on general nighttime image and their work needs
to have objects that are at least visible in both color
and thermal domains.
Pix2pix (Isola et al., 2017) and CycleGan (Zhu
et al., 2017) developed methods for cross domain
translation in paired and unpaired settings. Cycle con-
sistency (Zhu et al., 2017) is the main technique to
address unpaired cross-domain translation. Though
these translations mainly address style transfers from
source to target domains without moving the pixels
in the source domain. Our AlignGAN module uses
edge maps learned from the thermal image to gener-
ate aligned color images.
The remainder of this paper describes our method
and experiments in detail. In Section 3, we present
our system and describe the network architectures
along with the training procedure to generate pixel-
level invisibility maps. Finally in Section 4 we con-
clude with extensive experiments on our data set and
show several comparison results. Code, data, and
models will be released.
3 SYSTEM OVERVIEW
Our system learns to generate pixel-level invisibil-
ity maps for color images in an unsupervised way.
During the training phase, the system takes weakly-
aligned (color, thermal) image pairs of the same scene
as input. Such not-so perfectly aligned image pairs
are first registered to remove the geometric differ-
ences and then aligned by AlignGAN to remove the
remaining displacements between two modalities as
detailed in Section 3.1. After the image pairs are
well-aligned, our Knowledge Transfer System moves
the learned representations from the color domain to
the thermal domain. Then at the test stage, the pairs
are compared to estimate the invisibility score of ev-
ery pixel in the color image. As a side product, the
learned representations of the thermal images can be
directly used to construct an object detector for ther-
mal images without any manual labelling or retrain-
ing, as shown in Figure 2.
3.1 Alignment Generative Adversarial
Network
AlignGAN: From the given poorly aligned raw im-
age pairs, we remove the internal and external trans-
formations between two cameras using standard cam-
era calibration technique, described in Section 4.
Then we use AlignGAN to learn how to generate
well-aligned color image pairs from weakly-aligned
color-thermal pairs. The base block of the systems is
shown in Figure 3. As the figure shows, we use two
streams for learning - both using the same alignment
block - during one iteration of the training phase.
The first stream uses a color image and a weakly-
aligned thermal image as the edge map computed
Pixel Invisibility: Detect Object Unseen in Color Domain
203
79
82
79
82
91
94
91
94
103
103 106
106
feature
L
feature
L
feature
L
General Layer
Mid-level Layer to Transfer
Detection Layer (82, 94, 106)
Further Layers
Unlabeled
Image Pairs
Yolo-v3 Color
Weights Freezed
Yolo-v3 Thermal
Weights Active
Feature Difference
-
-
Yolo-v3
-
-
Matrix Substraction
F
Per-pixel Invisbiility
-
Fusion Function
F
(79, 91, 103)
Training Stage Test Stage I (All weights freezed)
Mask
Invisibility Mask
Layer 79
Yolo-v3
Layer 79
Color
Thermal
scale 1
scale 2
scale 3
Colormap hot:
are to the right of the scale
Higher value (Lower visibility)
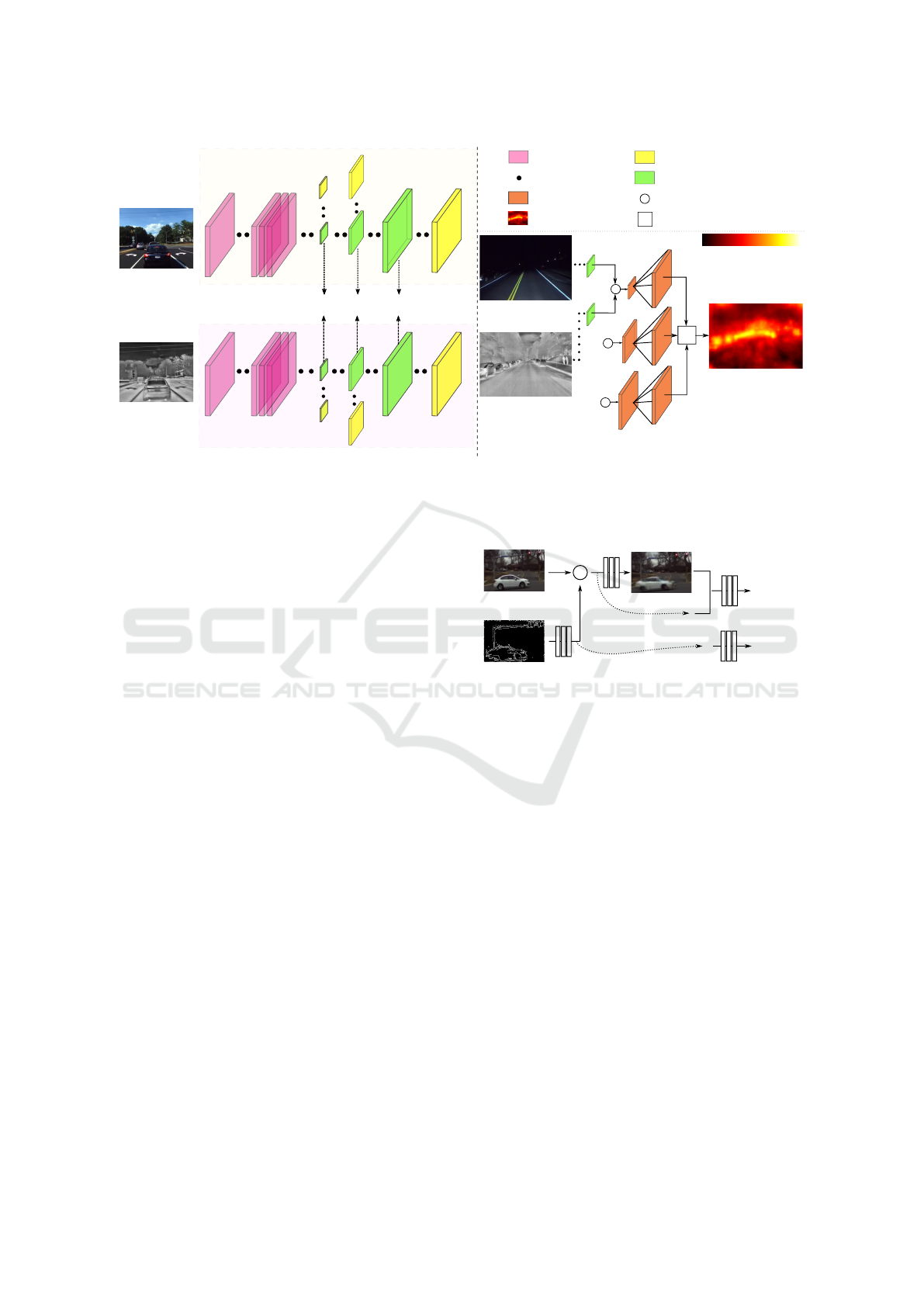
Figure 2: System overview. Our system takes well-aligned image pairs from unlabeled video streams. In the training stage
(left), the Yolo-v3 color network is frozen, while Yolov3-thermal network is trained to reproduce the mid-level features as the
ones in Yolov-v3 color network at three scales in layer 79, 91 and 103 of the network. In the test stage (right), the difference
of those features from layer 79, 91 and 103 are computed and fused to get the final invisibility mask.
based on Canny edge detector as the source and pro-
duces a color image as the target which is created us-
ing Flownet2 (Reda et al., 2017). Given two consecu-
tive color images from video sequence and one paired
image, Flownet2 is used first to estimate the optical
flow from one color image to the other. Then we
apply Canny edge detector on both the color images
and thermal image. The scale of the optical flow is
sought within a discrete set of numbers ranging from
-0.5 to 1.5 to maximize the overlapping area of edges
between source color image of the edge and thermal
image of the edge by applying optical flow. In the
other stream, source is image is still a color image,
edge map though is from a close color image I
c1
in the
video stream, and the target image is the color image
I
c1
itself. We built our system based Pix2pix (Isola
et al., 2017). Both the generative network G and G
m
use the U-Net architecture (Ronneberger et al., 2015)
with an input size of 512 × 512.
3.2 Knowledge Transfer from Color to
Thermal Domains
We choose YOLO-V3 architecture (Redmon and
Farhadi, 2018) to run the experiment mainly because
(1) It is fast and deployable in real-time applications.
(2) No need for a proposal network such as in the
Faster RCNN and MASK-RCNN. (3) It has three de-
tection modules based on three different image scales
with good detection capabilities for small objects that
may appear on a road.
We transfer the learned mid-level features in the
*
D
G
G
D
real/fake
source
edge map:
target
target
m
m
real/fake
Figure 3: Base alignment network. The module takes as
input source image and edge map from target position, and
outputs the target image in the given position. The con-
version from source to target, performed using network G
is conditioned on the motion cues generated using network
G
m
. The target prediction after network G and motion cues
generated by G
m
are fed into two discriminators D and D
m
respectively.
Yolo-V3 architecture that occurs prior to the detec-
tion stage, referred to as the mid-only transfer. They
are the outputs of layer 79, 91 and 103, respectively
from three different scales, as shown in the left side
of Figure 2. Similar to (Gupta et al., 2016), we
conducted two comparative experiments by transfer-
ring the last-layer detection results (Yolo-only) and
both intermediate-level features and the detection re-
sults (Mid+Yolo). The detection results are computed
based on the outputs of detection layers which are 82,
94 and 106.
We construct a thermal detector without any man-
ual labeling and fine-tuning by concatenating learned
intermediate features with the detection module from
color detector, which produces promising detection
accuracies for thermal images in different lighting
conditions, as shown in Section 4.2.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
204

3.3 Invisibility Estimation
Now we have two detectors Yolo
c
and Yolo
t
where
Yolo
c
is pre-trained on richly-annotated data sets and
Yolo
t
is trained using well-aligned image pairs to re-
produce the same intermediate-level features as the
ones in Yolo
c
. Based on the observation that mid-level
features for thermal images are much less affected by
the lighting conditions than the ones in color images,
as shown in Section 4.2, we use the feature differences
to estimate the lighting conditions and thereby esti-
mated the visibility of every pixels in color images.
The YOLO-v3 architecture has three detection
modules to predict the objects at three different scales,
and consequently it provides intermediate-level fea-
tures at three different scales. We propose an invisibil-
ity score to integrate the features differences at differ-
ent scales as shown on the right side of the Figure 2.
Here we define the invisibility score for an pixel s
i
as a function F of the L2-distances of the mid-level
features {d
k
| k = 1, 2,3} between color and thermal
images in Equation 1. Here d
1
, d
2
, d
3
are from layer
79, 91, 103 respectively and t
k
is the highest value
that we choose for d
k
. Finally we trained a convolu-
tional neural network based on U-Net (Ronneberger
et al., 2015) to generate invisibility masks even in the
absence of thermal images.
F(d
1
,d
2
,d
3
) = 1 −
1
3
3
∑
k=1
min((t
k
− d
k
)/t
k
,0) (1)
4 EXPERIMENTS
Experimental Setup: This section presents experi-
mental outcomes for predicting undetectable areas in
color images and the unsupervised knowledge trans-
fer from color to thermal domain. We built a sensor
platform that can be installed on the roof rack of any
car (and we used such as setup for experiments). We
used a FLIR ADK camera and the right ZED camera
as our sensor pair. The color-thermal calibration was
performed using Caltech Calibration tools with a pla-
nar checkerboard partly made of an aluminium foil.
This removes major parts of camera distortion and
helps establish a coarse estimation for common field
of view and scale differences. With Homographic
warping based on pairs of corresponding points from
two image planes, the disparity problem in the static
scene can be addressed well. Such weakly-aligned
pairs of images are then taken as the input of Align-
GAN.
Data Set - Color-thermal Pair: We sampled
18,546 color-thermal pairs from the videos (around
12,0000 image pairs) that we collected while driving
in the day to construct the training set for transferring
the intermediate-level features from color domain to
thermal domain. For the validation data set, we man-
ually labeled 2000 image pairs with object bounding
boxes, 500 during dawn, 500 during dusk, 500 during
night and 500 during fog. They were used to eval-
uate the prediction performance of the undetectable
area in color images and detection performance for
thermal images. We don’t have the exact statistics of
our training set since we didn’t label them by hand.
Though our manually labeled validation set which
contains 7821 cars, 1138 traffic signs, 626 people and
343 trucks provide a sense of our training data set.
Comparison with Other Data Sets: To the best of
our knowledge, our data set is the first to attempt
on estimating pixel level sensor limitation for color
cameras. Because it is based on color-thermal im-
age pairs, even objects that are not seen from the
color domain will also be annotated. The Freiburg
Thermal Dataset (Vertens et al., 2020) that consists
of (color, thermal) image pairs could be very suit-
able for evaluating our invisibility score, although it
has not been released yet. Other data sets like Dark
Zurich (Sakaridis et al., 2019) or Foggy Zurich Data
sets (Dai et al., 2020) may not be as suitable because
of the following two reasons, even though both of
them are captured under challenging visibility con-
ditions. First, since both of them only have images
from the color domain, it’s impossible to annotate
completely dark/heavy foggy areas where objects are
actually present. Secondly, both data sets are much
less challenging than Color-thermal Pair Data sets.
Through close observation, almost all the 2617 night
images from Dark Zurich are captured from well-lit
city streets, making most objects already visible to the
color images, which is shown in the top right plot in
Figure 4. Among the 3808 images from the Foggy
Zurich data set, nearly half of them are captured in
very light fog and the remaining images contain very
few objects that are challenging to detect, which is
also shown in the bottom right plot in Figure 4. Dark
Zurich data set has 50 images that are annotated and
we included and expanded the test data set by manu-
ally labeling bounding boxes of objects for other 46
images from its test data, having 96 images in total.
Foggy Zurich Data has 40 images that are annotated.
Similarly we expand the test data set to 80 images by
manually annotating 40 more sampled from its data
set.
Pixel Invisibility: Detect Object Unseen in Color Domain
205
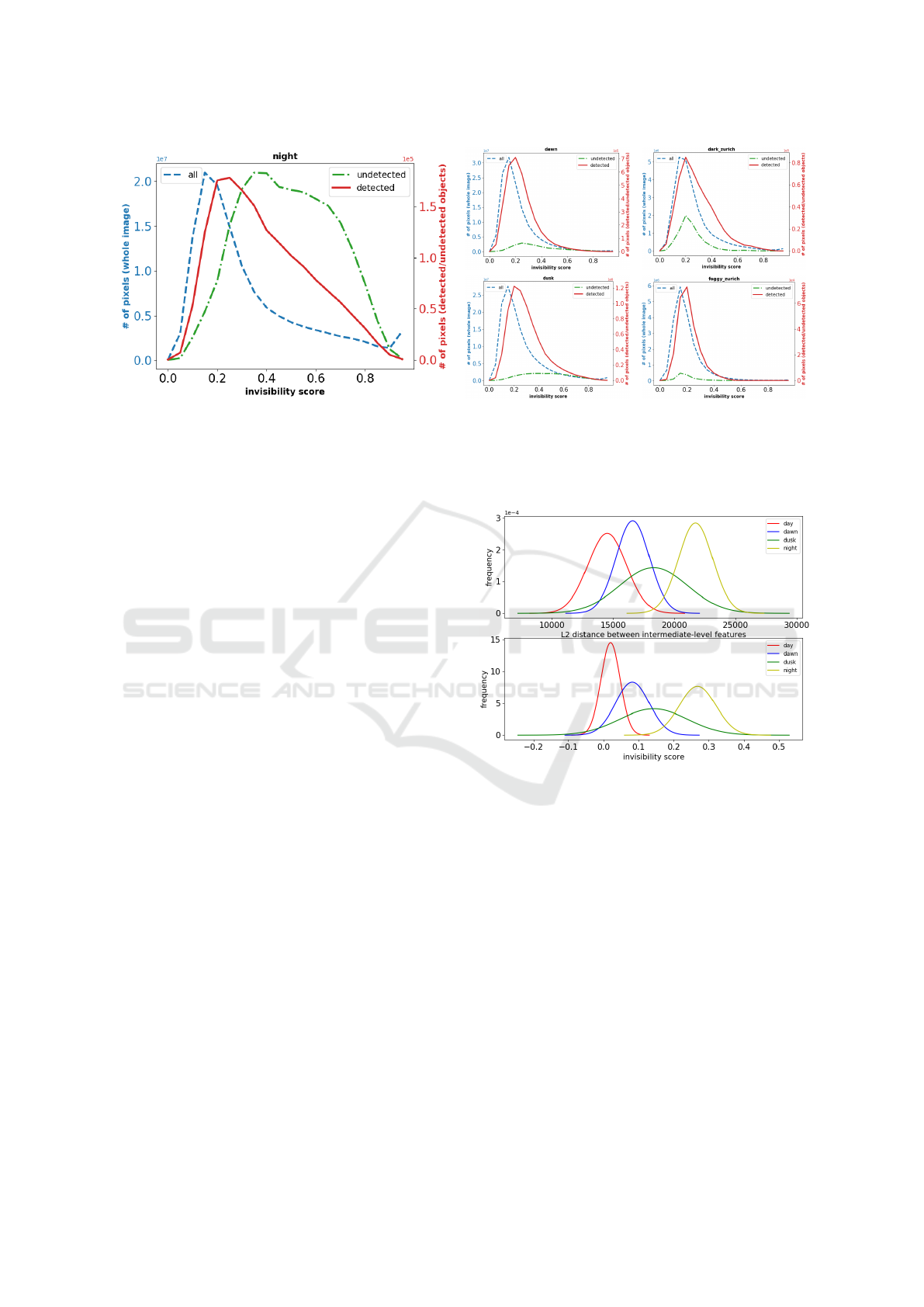
Figure 4: We show the result of pixel-level invisibility masks on capturing false negatives of MASK-CNN for night scenes
(left). With a threshold of 0.35 (separated by empty bars and solid bars) for invisibility score, the invisibility map can
cover 77.5% of the pixels in the undetected objects(green bar) while only taking up 35.9% of the pixels in the night images.
Performance of the invisibility score from dawn, dusk time and other data sets of Dark Zurich and Foggy Zurich are also
shown on the right.
Experiment Focus: We focus on answering the fol-
lowing five questions in this section. (1) How good is
the prediction of invisible areas in color images? (2)
How good is the detection performance on thermal
images through knowledge transfer? (3) Which level
of representation transfer will give the best result on
the detection accuracy? (4) Will our AlignGAN en-
hance the knowledge transfer process? and finally (5)
How will the transfer performance change with re-
spect to the number of images pairs? Now we answer
those questions quantitatively using our results.
4.1 How Good is the Prediction of the
Undetected Areas in the Color
Image?
We use intermediate-level features from two paired
DNNs as a shared space where Euclidean distance
serves as the estimation of the reliability of color im-
ages compared to thermal images. Our experiment re-
sults show that the proposed system can produce good
quality masks for invisibility. In our experiment, we
set the t
1
, t
2
, t
3
to 4, 3.5, 3.2 respectively in Equa-
tion 1.
Our first observation is that the predicted invisi-
bility scores change based on the light intensity vari-
ations of the environment. For image pairs respec-
tively from day, dawn, dusk, and night, we compute
the invisibility score learned from our system and the
L2 distance between the intermediate-level features of
color and thermal images. As shown in Figure 5, both
the feature difference and invisibility score increases
while the light intensity of the environment decreases.
This is consistent with the observation that color im-
Figure 5: Distributions of distances and invisibility score.
We show the L2 distance distributions (upper figure) be-
tween intermediate-level features from layer 79, 91 and 103
in Yolo-v3 and the invisibility scores (lower) from different
lighting conditions. The Gaussian distributions from left to
right are respectively from data of daytime, dawn, dusk and
night.
ages are much less reliable than thermal images un-
der poor lighting conditions. The Gaussian distribu-
tion of invisibility score for day is (0.020, 0.028) and
for night is (0.268, 0.052). The two distributions are
highly separable with few overlaps, as shown in Fig-
ure 5, which qualitatively demonstrates that our pixel-
level invisibility score is able to predict the unseen re-
gions in the color images under varying lighting con-
ditions.
A good binary visibility mask has two character-
istics of (1) covering most of the undetectable objects
(2) covering only the undetectable area in an image,
which we use in quantified form to assess the effec-
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
206
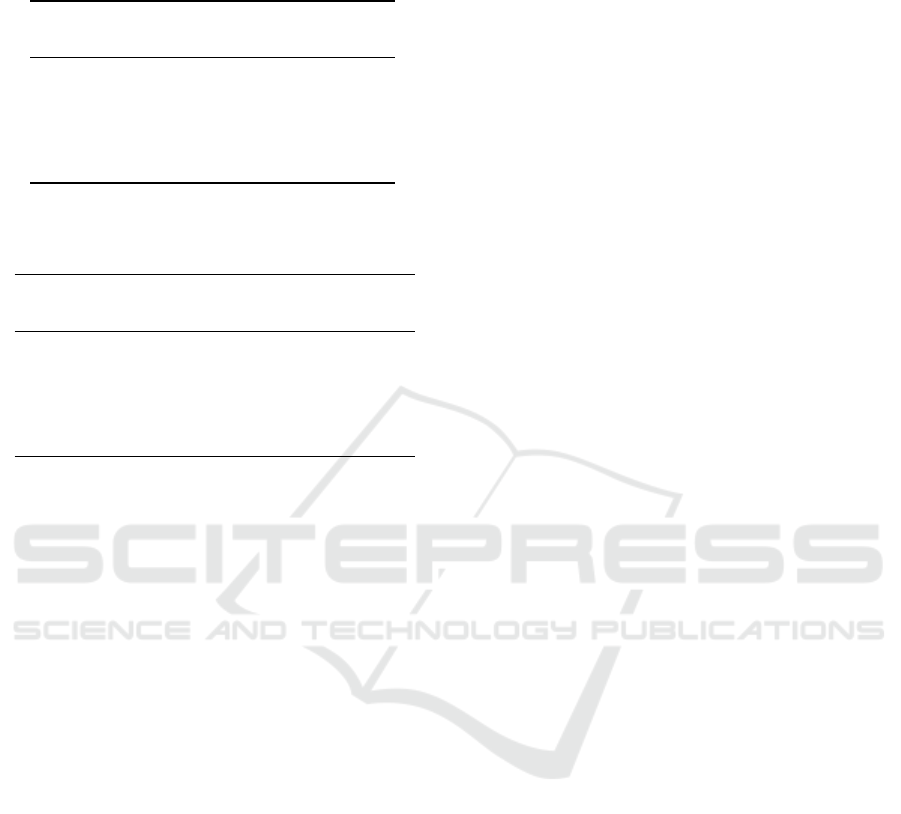
Table 1: Detection accuracy for different lighting condi-
tions. Even for night scenes which are not present in the
training set, the overall accuracy is up to 34.2%.
Name Car Person
Traffic
Light
All
day 0.620 0.191 0.576 0.462
dusk 0.610 0.186 0.485 0.424
dawn 0.600 0.337 0.476 0.471
night 0.506 0.120 0.399 0.342
fog 0.496 0.149 0.365 0.337
Table 2: Detection accuracy for different layers. We found
that using only the mid-level features to transfer can achieve
the best accuracy for object detection.
Name Car Person
Traffic
Light
All
Mid-only 0.513 0.241 0.470 0.408
M+Y 0.05 0.470 0.178 0.516 0.388
M+Y 0.1 0.474 0.171 0.500 0.382
M+Y 1.0 0.437 0.170 0.475 0.361
Yolo-only 0.447 0.164 0.463 0.358
tiveness of our results.
Now we report results of a quantitative analy-
sis showing the effectiveness of predicting the un-
detectable area in the color images. The invisibility
mask for nighttime images can cover 77.5% of the un-
detectable area in the image with the visibility thresh-
old of 0.35 and only report 35.9% of the whole image.
The invisibility mask for dawn time covers 49.2% of
the undetected area while reports 15.4% of the whole
image. For dusk, it covers 73.4% of the undetected
area while reports only 22.2% of the image, as shown
in Figure 4.
We also tested our invisibility estimation on model
failures by evaluating our color-only model on two
expanded data sets from Dark Zurich and Foggy
Zurich. The number of undetected objects are far
less than the detected objects compared to our color-
thermal data set, which is shown in the right most
plots of Figure 4. Furthermore, the invisibility map
can cover only 15% of the undetected objects from
MASK-RCNN. This justifies the claim that sensor
limitation is different from model limitation and our
invisibility score is a good indicator of the limitation
of the color camera itself.
4.2 Can Paired Data Facilitate
Detection using Transfer Learning?
Firstly, we report that the knowledge transfer through
mid-level features can reach 46.2% overall detection
accuracy for thermal imagery in the Color-thermal
data set. Because learning doesn’t require any man-
ual annotations and doesn’t require any retraining, we
found the result to be promising.
We evaluated the effectiveness of AlignGAN us-
ing the post application of object detection. We tested
the detection performance of the daytime data trained
thermal detector on the night time data, and observed
that it can still get to an overall accuracy of 34.2%.
The images used in the training phase were chosen
from day time with good lighting conditions and the
test set includes images taken during dawn, dusk,
night and fog. Without any manually labelled train-
ing data, the detection IOU of cars can reach 50.6%
in the night as shown in Table 1. This quantity shows
that the intermediate-level features of thermal images
can be transferred smoothly from day to night, in con-
trast to the ones in color images. The principal used
in our invisibility score is that features in thermal im-
ages remain stable with respect to light change and
are trained to be like the ones in color, the mid-level
features produced by thermal images are of the same
utility of features in color images when lighting con-
ditions are poor. This is the most possible reason for
the success on estimating the invisibility of the color
images using our invisibility scores as shown in Sec-
tion 4.1.
4.3 Which Layer is More Effective?
We experimented with the knowledge transfer from
different layers. Gupta et al. (Gupta et al., 2016) indi-
cates that combining mid-level features with last layer
features will give the best detection results when re-
training on the target data sets. Although we show
that using mid-level features only gives the best de-
tection result of (40.8%) over mid-last layer transfer
(36.1%) and the one using the yolo-layer only gives
(35.8%). These results are summarized in Table 2.
More importantly, we varied the weight of the Yolo
layer to 0.05 and 0.1 in the loss function and con-
ducted two more experiments. Surprisingly, we found
that higher weights on the Yolo layer resulted in worse
overall detection accuracy. One potential explanation
for this observation is that the data set is not large
enough to train a new object detector for all modules,
especially for both the class prediction and bound-
ing box regression. Consequently, we learnt that it
is more efficient to learn only the mid-level features
and to not change layers of the detection module.
Pixel Invisibility: Detect Object Unseen in Color Domain
207
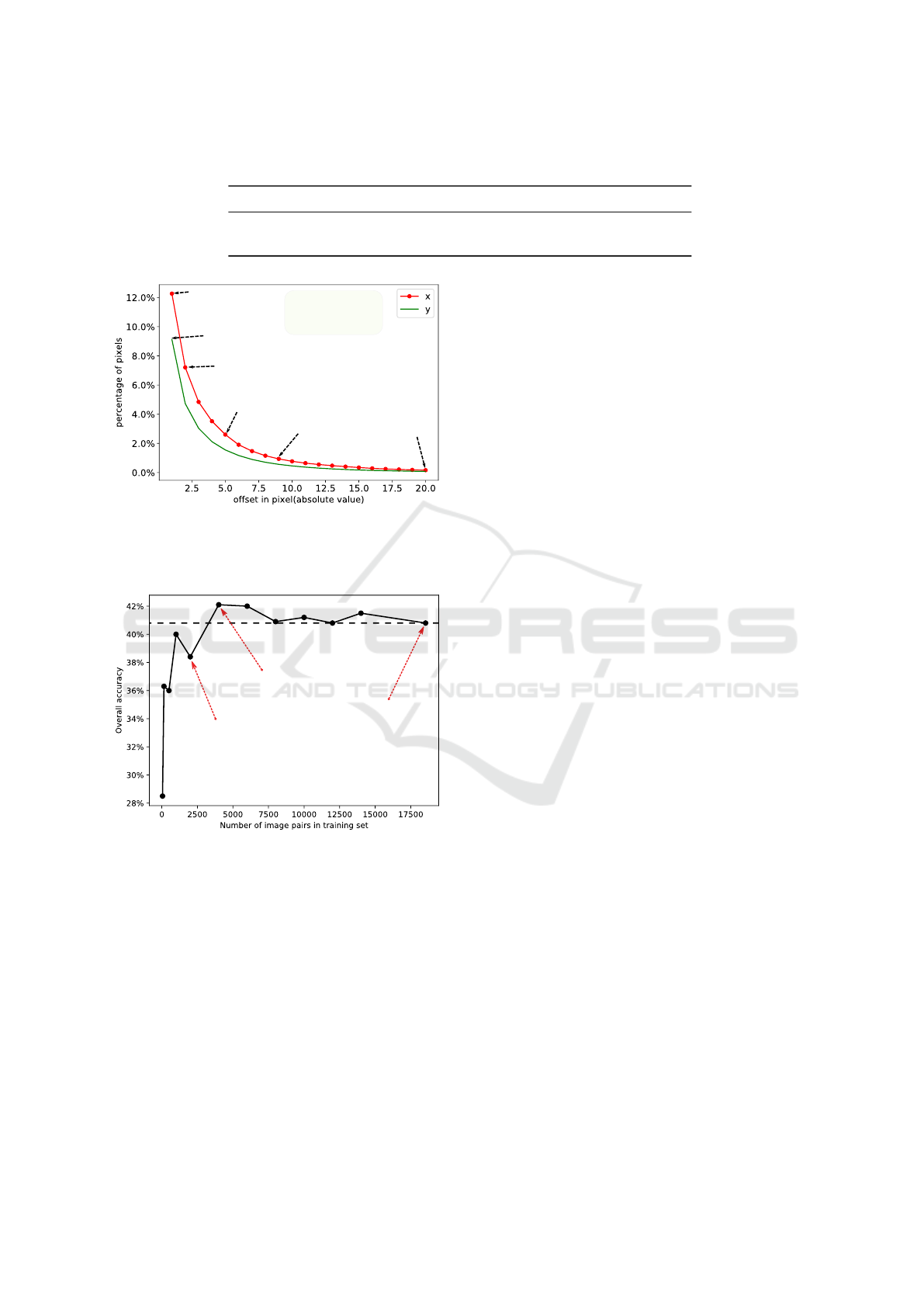
Table 3: Detection accuracy for AlignGAN. With the alignment module, there is a relative 2.77% boost in terms of overall
accuracy.
Name car Person traffic light All
Mid+Yolo 1.0 0.437 0.170 0.475 0.361
Mid+Yolo 1.0 + Flow Encoder 0.442 0.191 0.481 0.371
(1, 12.3%)
(1, 9.13%)
(2, 7.21%)
(5, 2.60%)
(9, 0.938%)
(20, 0.162%)
(1, 12.3%) - On average,
12.3% of the pixels
in one image have
an offset of 1 or more pixels
Figure 6: X-Y offset distribution. We show that in the im-
age plane offset in x direction is on average larger than that
in y direction. Also distinct movements(5 pixels or more)
constitute 2.6% of the pixels in the images.
40.8%
(4000, 42.1%)
(18546, 40.8%)
(2000, 36.0%)
Figure 7: Comparison of data set sizes. We experiment with
different sizes of training data sets for knowledge transfer,
and observes that using 4000 image pairs can obtain the
same if not better accuracy as the original size of 18,546
image pairs.
4.4 How Much will the AlignGAN Help
the Detection?
Even after the pre-processing, the image pairs still
have some displacements. Here we calculate the
statistics of such displacements. With an image reso-
lution of 640 by 512, the estimated X-Y displacement
is shown in Figure 6. On average, there are only about
2.6% pixels in one image that have 5 or more pixel
displacements on the X-direction, which we consider
to be the threshold of movement that affects the de-
tection results. Also, we noticed more displacements
in the X-direction than in the Y-direction in the image
plane. We attribute this to the fact that object move-
ments projected to the image plane are more obvious
in X-direction than the Y-direction.
We evaluated how AlignGAN can improve the
data transfer from color domain to thermal domain.
In Table 3, the Alignment module gave an enhance-
ment of 1% in terms of detection accuracy.
4.5 How Many Pairs are Needed to Get
a Good Transfer?
Section 3.2 showed that mid-level feature transfer re-
sults in the best performance. We now determine the
number of image pairs required to achieve that perfor-
mance. Surprisingly, Figure 7 shows that randomly
sampled 4000 image pairs from the space of 18,546
image pairs can achieve the same if not better accu-
racy than the entire sample space. This observation
implies that the domain difference from color to ther-
mal can be learned from a small amount of images
pairs and the transfer discriminating visual represen-
tations from the well-established color detection task
to thermal images can be done in a light-weighted
manner.
Figure 7 shows experimental results with differ-
ent number images from 100 to 18000 and that the
performance will be stable after 4000 images. Such
results may appear to be counter intuitive at first sight
as more data often leads to better results when model
capacity is large enough like the one we use in the
experiment. One potential explanation for the satura-
tion point is that the two domains have much in com-
mon and thus the domain difference can be mitigated
with a few examples. This saturation point observa-
tion with 4000 samples can be used as a promising de-
ployment strategy of direct knowledge transfer. One
conclusion from this observation is that less time is
needed for training for both the invisibility prediction
and the direct knowledge transfer for object detection.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
208

5 CONCLUSION
Given a color image, we predict a pixel-level invisibil-
ity mask for such an image without manual labelling.
Equipped with this map, a system could decide to
trust detection results of some regions over others in
an image or generate warnings to a driving automa-
tion. Such a mask can also be used as the confidence
map to fuse the outputs from multiple sources when
many visual sensors are deployed. Compared to exist-
ing works in the area, our mask estimates the sensor
limitations for each pixel instead of model limitations,
which is the first attempt to fill this gap. Experiments
have shown that our mask is able to distinguish most
of the invisible pixels from the visible pixels. Our
results also demonstrate the effectiveness of building
an object detector for the thermal domain using the
mid-level features transferred from its peer color im-
ages. Our ongoing work is on creating a generalized
invisibility mask for color, thermal, Lidar and radar
imagery. And more importantly we will explore an
approach to detect scenarios when all the sensors will
fail, so that a driving automation could invoke appro-
priate failure tolerance mechanisms.
ACKNOWLEDGEMENTS
This research was partially supported by the Com-
monwealth Cyber Initiative, which invests in cy-
ber R&D, innovation, and workforce development
(cyberinitiative.org). Some of the experiments were
run on ARGO, a research computing cluster provided
by the Office of Research Computing at George Ma-
son University, VA. (URL: http://orc.gmu.edu). We
also thank Meili Liu for labeling the validation data
set for the experiments.
REFERENCES
Aytar, Y., Vondrick, C., and Torralba, A. (2016). Sound-
net: Learning sound representations from unlabeled
video. In Advances in neural information processing
systems, pages 892–900.
Blundell, C., Cornebise, J., Kavukcuoglu, K., and Wierstra,
D. (2015). Weight uncertainty in neural networks.
arXiv preprint arXiv:1505.05424.
Choi, Y., Kim, N., Hwang, S., Park, K., Yoon, J. S., An,
K., and Kweon, I. S. (2018). Kaist multi-spectral
day/night data set for autonomous and assisted driv-
ing. IEEE Transactions on Intelligent Transportation
Systems, 19(3):934–948.
Corbi
`
ere, C., Thome, N., Bar-Hen, A., Cord, M., and P
´
erez,
P. (2019). Addressing failure prediction by learning
model confidence. In Advances in Neural Information
Processing Systems, pages 2898–2909.
Daftry, S., Zeng, S., Bagnell, J. A., and Hebert, M. (2016).
Introspective perception: Learning to predict failures
in vision systems. In 2016 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 1743–1750. IEEE.
Dai, D., Sakaridis, C., Hecker, S., and Van Gool, L. (2020).
Curriculum model adaptation with synthetic and real
data for semantic foggy scene understanding. Inter-
national Journal of Computer Vision, 128(5):1182–
1204.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
DeVries, T. and Taylor, G. W. (2018). Learning confidence
for out-of-distribution detection in neural networks.
arXiv preprint arXiv:1802.04865.
Everingham, M., Van Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2010). The pascal visual object
classes (voc) challenge. International journal of com-
puter vision, 88(2):303–338.
Gal, Y. (2016). Uncertainty in deep learning. University of
Cambridge, 1:3.
Gal, Y. and Ghahramani, Z. (2016). Dropout as a bayesian
approximation: Representing model uncertainty in
deep learning. In international conference on machine
learning, pages 1050–1059.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. The Inter-
national Journal of Robotics Research, 32(11):1231–
1237.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
international conference on computer vision, pages
1440–1448.
Gupta, S., Hoffman, J., and Malik, J. (2016). Cross modal
distillation for supervision transfer. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 2827–2836.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
Hecker, S., Dai, D., and Van Gool, L. (2018). Failure pre-
diction for autonomous driving. In 2018 IEEE In-
telligent Vehicles Symposium (IV), pages 1792–1799.
IEEE.
Hendrycks, D. and Gimpel, K. (2016). A baseline for de-
tecting misclassified and out-of-distribution examples
in neural networks. arXiv preprint arXiv:1610.02136.
Hwang, S., Park, J., Kim, N., Choi, Y., and So Kweon, I.
(2015). Multispectral pedestrian detection: Bench-
mark dataset and baseline. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 1037–1045.
Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. A. (2017).
Image-to-image translation with conditional adversar-
ial networks. In Proceedings of the IEEE conference
Pixel Invisibility: Detect Object Unseen in Color Domain
209

on computer vision and pattern recognition, pages
1125–1134.
Jain, S. D., Xiong, B., and Grauman, K. (2017). Pixel ob-
jectness. arXiv preprint arXiv:1701.05349.
Kendall, A., Badrinarayanan, V., and Cipolla, R. (2015).
Bayesian segnet: Model uncertainty in deep convolu-
tional encoder-decoder architectures for scene under-
standing. arXiv preprint arXiv:1511.02680.
Kendall, A. and Gal, Y. (2017). What uncertainties do
we need in bayesian deep learning for computer vi-
sion? In Advances in neural information processing
systems, pages 5574–5584.
Kuhn, C., Hofbauer, M., Petrovic, G., and Steinbach, E.
(2020). Introspective black box failure prediction for
autonomous driving. In 31st IEEE Intelligent Vehicles
Symposium.
Lee, K., Lee, H., Lee, K., and Shin, J. (2017).
Training confidence-calibrated classifiers for detect-
ing out-of-distribution samples. arXiv preprint
arXiv:1711.09325.
Li, C., Song, D., Tong, R., and Tang, M. (2018). Multispec-
tral pedestrian detection via simultaneous detection
and segmentation. arXiv preprint arXiv:1808.04818.
Liang, S., Li, Y., and Srikant, R. (2017). Enhancing the reli-
ability of out-of-distribution image detection in neural
networks. arXiv preprint arXiv:1706.02690.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017). Focal loss for dense object detection. In
Proceedings of the IEEE international conference on
computer vision, pages 2980–2988.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Springer.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In European conference on com-
puter vision, pages 21–37. Springer.
Rahman, Q. M., S
¨
underhauf, N., and Dayoub, F. (2019).
Did you miss the sign? a false negative alarm system
for traffic sign detectors. In 2019 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS), pages 3748–3753.
Ramanagopal, M. S., Anderson, C., Vasudevan, R., and
Johnson-Roberson, M. (2018). Failing to learn: au-
tonomously identifying perception failures for self-
driving cars. IEEE Robotics and Automation Letters,
3(4):3860–3867.
Reda, F., Pottorff, R., Barker, J., and Catanzaro, B. (2017).
flownet2-pytorch: Pytorch implementation of flownet
2.0: Evolution of optical flow estimation with deep
networks.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 779–
788.
Redmon, J. and Farhadi, A. (2017). Yolo9000: better, faster,
stronger. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 7263–
7271.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Sakaridis, C., Dai, D., and Gool, L. V. (2019). Guided cur-
riculum model adaptation and uncertainty-aware eval-
uation for semantic nighttime image segmentation. In
Proceedings of the IEEE International Conference on
Computer Vision, pages 7374–7383.
Vertens, J., Z
¨
urn, J., and Burgard, W. (2020). Heat-
net: Bridging the day-night domain gap in seman-
tic segmentation with thermal images. arXiv preprint
arXiv:2003.04645.
Yu, F., Xian, W., Chen, Y., Liu, F., Liao, M., Madhavan, V.,
and Darrell, T. (2018). Bdd100k: A diverse driving
video database with scalable annotation tooling. arXiv
preprint arXiv:1805.04687.
Zhang, L., Zhu, X., Chen, X., Yang, X., Lei, Z., and Liu, Z.
(2019). Weakly aligned cross-modal learning for mul-
tispectral pedestrian detection. In Proceedings of the
IEEE International Conference on Computer Vision,
pages 5127–5137.
Zhang, P., Wang, J., Farhadi, A., Hebert, M., and Parikh, D.
(2014). Predicting failures of vision systems. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition, pages 3566–3573.
Zhu, J.-Y., Park, T., Isola, P., and Efros, A. A. (2017).
Unpaired image-to-image translation using cycle-
consistent adversarial networks. In Proceedings of
the IEEE international conference on computer vi-
sion, pages 2223–2232.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
210
