
A Method of Deep Reinforcement Learning for Simulation of
Autonomous Vehicle Control
Anh T. Huynh
1,4
, Ba-Tung Nguyen
1,4
, Hoai-Thu Nguyen
1,4
, Sang Vu
2,4
and Hien D. Nguyen
3,4 a,*
1
Faculty of Software Engineering, University of Information Technology, Ho Chi Minh City, Vietnam
2
Faculty of Information Systems, University of Information Technology, Ho Chi Minh City, Vietnam
3
Faculty of Computer Science, University of Information Technology, Ho Chi Minh City, Vietnam
4
Vietnam National University, Ho Chi Minh City, Vietnam
Keywords: Autonomous Vehicles, Reinforcement Learning, Policy Gradient, Simulator, Software Engineering.
Abstract: Nowadays autonomous driving is expected to revolutionize the transportation sector. Carmakers, researchers,
and administrators have been working on this field for years and significant progress has been made. However,
the doubts and challenges to overcome are still huge, regarding not only complex technologies but also human
awareness, culture, current traffic infrastructure. In terms of technical perspective, the accurate detection of
obstacles, avoiding adjacent obstacles, and automatic navigation through the environment are some of the
difficult problems. In this paper, an approach for solving those problems is proposed by using of Policy
Gradient to control a simulated car via reinforcement learning. The proposed method is worked effectively to
train an agent to control the simulated car in Unity ML-agents Highway, which is a simulating environment.
This environment is chosen from some criteria of an environment simulating autonomous vehicle. The testing
of the proposed method got positive results. Beside the average speed was well, the agent successfully learned
the turning operation, progressively gaining the ability to navigate larger sections of the simulated raceway
without crashing.
1 INTRODUCTION
According the report of WHO (2020), the traffic
death is one of top 10 causes of death in the world,
and the first cause for young people. Clearly, other
problems derived from transportation are in terms of
Global Warming caused by the gas emissions of
transportation. In some countries, it can reach up to
28% of the total emissions that cause the Greenhouse
Gas (EPA, 2018). For those reasons, manufactures
have been aware that their future is Autonomous
Vehicle (AV) development. AV will reduce the
number of traffic accidents, reduce traffic jams and
hours wasted inside the car. It also will optimize the
energy consumption reducing gas emissions, etc.
Consequently, the AV will be a technological
challenge. There are many technical problems in the
development of AV, such as the accurate detection of
obstacles, avoiding adjacent obstacles, and automatic
navigation through the environment (Marina and
Sandu, 2017).
*
Corresponding author.
a
https://orcid.org/0000-0002-8527-0602
In recent years, Reinforcement Learning (RL) is
considered to be an interesting learning technique that
requires only performance feedback from the
environment (Sutton and Barto, 2015). It is usually
used to solve learning problems. There are many
fields to apply RL techniques. Agent57 is a deep RL
agent can play 57 Atari games (Badia et al., 2020).
The optimization of policies of a marketing campaign
was determined by using RL algorithms (Perez et al.,
2009, Lucarelli and Borrotti, 2020). Deep learning is
used to detect diabetic retinopathy in healthcare
(Nguyen et al., 2021) and sentiment analysis of
sentences (Nguyen et al., 2020a). Is it possible to
utilize the advantage and smart of RL to solve these
traffic problems human-being are facing.
In this paper, an approach for solving some
problems of AV is proposed by using of a RL
algorithm, Policy Gradient, to control a simulated car
via reinforcement learning. Besides, some criteria of
an environment simulating autonomous vehicle have
been studied based on simulator’s abilities and
372
Huynh, A., Nguyen, B., Nguyen, H., Vu, S. and Nguyen, H.
A Method of Deep Reinforcement Learning for Simulation of Autonomous Vehicle Control.
DOI: 10.5220/0010478903720379
In Proceedings of the 16th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2021), pages 372-379
ISBN: 978-989-758-508-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

software evaluation. The proposed method works
effectively to train an agent controlling the simulated
car in Unity ML-agents Highway, which is a chosen
simulating environment by using the simulator’s
criteria. The results of testing get positive results.
Beside the average speed was well, the agent
successfully learned the turning operation,
progressively gaining the ability to navigate larger
sections of the simulated raceway without crashing.
2 RELATED WORK
There are many studies for designing and training of
autonomous driving. Using reinforcement learning is
a useful approach to solve some problems of this
work (Huang et al., 2017, Min et al., 2019). However,
those results have not yet mentioned to how those
methods work well based on determined criteria.
Huang et al. (2017) proposed longitudinal control
of autonomous land vehicles using parametric
reinforcement learning. This approach used the
parameterized batch actor-critic algorithm to get
optimal control policies which adaptively tune the
fuel control signals for tracking speeds. Nevertheless,
they did not give some simulating criteria to evaluate
the effectiveness of autonomous driving.
The results in (Lin, 1992) proposed eight
extensions of the reinforcement method, including
adaptive heuristic critic (AHC), Q-learning and three
other extensions for both methods to speed up
learning. They mainly focus on Deep Q-Network
(DQN) based on learning for agent training.
Nonetheless, those results do not perform the
application of RL in designing of autonomous
vehicle.
Min et al. (2019) defined highways driving policy
using the reinforcement learning method. They also
proposed a supervisor agent using deep distributional
reinforcement learning to enhance the driver assistant
systems. The supervisor agent is trained using end-to-
end approach that directly maps both a camera image
and LIDAR data into action plan. However, they did
not show the performance of that method on other
simulator.
Reasoning methods are useful for designing of
intelligent systems. Those were applied for detecting
influencers on social networks (Huynh et al., 2019)
and intelligent searching on the knowledge of courses
(Pham et al., 2020). In AV control, the reasoning
method based on traffic rules is used in the training of
driver’s behaviors for the device (Talamini et al.,
2020).
There are two main algorithms used for
reinforcement learning: Q-Learning and Policy
Gradient (PG). Q-learning is an off-policy RL
algorithm that seeks to find the best action to take
given the current state (Hasselt et al., 2015, Watkins
and Dayan, 1992). It is considered off-policy because
the q-learning function learns from actions that are
outside the current policy, like taking random actions,
and therefore a policy isn’t needed. More specifically,
Q-learning seeks to learn a policy that maximizes the
total reward. Policy Gradient (PG) is one of the most
important techniques in RL (Silver et al., 2014). In
this algorithm, the agent through a policy takes some
actions within the environment, then it receives from
the environment, the reward and the observations of
the state. The goal of PG is to find a policy which
given some states (inputs) and over some actions
(outputs) is able to maximize the expected sum of
rewards (Peters and Schaal, 2008
)
, so this method is
useful to implement with the AV simulator.
3 DEEP INTO REINFORMENT
LEARNING
3.1 Reinforcement Learning
Reinforcement learning (RL) is an approach of
machine learning (ML). It is different from the other
ML techniques due to its objective is to learn various
behaviour based on the environment.
Figure 1: Reinforcement learning schema.
Figure 1 shows a basic schema of an RL setting.
Agent is the main actor. It is the learning system
responsible for observing the environment, choosing
and performing Actions. In the agent, Policy is the
strategy responsible for choosing the best Actions to
get the maximum Reward based on the current state.
Action is a set of possible moves the Actor can
perform in the environment. Reward is the reward or
penalty (negative reward) gotten from the
Environment after performing Actions. It is the
feedback telling the success or the failure of the
Agent’s Action. Environment is the physical world
where the Agent moves. State (Observation) is the
A Method of Deep Reinforcement Learning for Simulation of Autonomous Vehicle Control
373

current and concrete situation of the Agent in the
environment.
In summary, the Agent observes the Environment,
selects and performs Actions, and gets Rewards.
Then, in order to get the most Reward over time, the
Policy learns by itself what is the best strategy by
defining which are the Actions the Agent should
choose when it is in a given State.
3.2 Policy Gradient
The Policy is a neural network (Figure 2) which
processes the state information through some layers
of neurons and ends up with a distribution over all
possible actions that you might want to take (Sehnke
et al., 2010) Then, from this distribution, it is sampled
an action which is the action that would be taken by
the agent. Finally, new rewards and states are gotten.
This process is repeated until the end with the
episode.
Figure 2: Policy neural network.
Policy Gradient optimizes policy directly. Policy
is usually a parameterized function respect to ,
denoted 𝜋
a|s
. PG optimizes value of
𝜃 so that the
objective function based on reaches maximum value.
The objective function is defined as:
𝐽
𝜃
𝐸
𝑅
𝜏
(1)
where, 𝜏 is a sequence of states and actions.
𝜏≡𝑠
,𝑎
,𝑠
,𝑎
,...,𝑠
,𝑎
(2)
PG estimates the gradient of the objective
function using the following formula:
𝑔𝛻
𝐸
𝑅
𝜏
𝛻
𝑙𝑜𝑔 𝜋
𝑎
|𝑠
𝛾
𝑟
(3)
where, 𝛾 is a discount factor, to reduce variance
when 𝜏 is long, and T is high.
Using baseline to further reduce the variance:
𝑔𝛻
𝐸
𝑅
𝜏
𝛻
𝑙𝑜𝑔 𝜋
𝑎
|𝑠
𝑟
𝛾
𝑏𝑠
(4)
There are different types of baselines. We use the
estimate of the discounted sum of rewards here:
𝑏
𝑠
≃𝑣
,
𝑠
𝐸𝛾
𝑟
| 𝑠
𝑠
(5)
It will increase the probability of paths that are
better in average and decrease the probability of those
that are worst on average. Table 1 shows the PG
algorithm.
Table 1: Policy Gradient algorithm.
Initialize
p
olicy parameter θ, baseline b
For iteration = 1, 2, . . .n do
Collect a set of trajectories by executing the
current policy.
At each step in each trajectory, compute:
The return 𝑅
∑
𝛾
𝑟
, and
The advantage estimate 𝐴
𝑅
𝑏𝑠
Re-fit the baseline, by minimizing
𝑅
𝑏𝑠
, summed over all trajectories and
timesteps.
Update the policy, using a policy gradient
estimate 𝑔
, which is a sum of terms
𝛻
𝑙𝑜𝑔 𝜋
𝑎
|𝑠
𝐴
end for
The reward function is defined as sum of 5
following rewards:
Longitudinal reward: ((vehicle_speed -
vehicle_speed_min) / (vehicle_speed_max -
vehicle_speed_min)).
0: Minimum speed, 1: Maximum speed.
Since we expect the agent to maximize the
velocity of the controlled vehicles.
Lateral reward: - 0.5. During the lane
change it continuously get lateral reward
Since we expect the agent to minimize the
number of lane changes.
Overtake reward: 0.5* (num_overtake -
num_overtake_old)
Since we expect the agent to overtake more
other vehicles as it can.
Violation reward: -0.1. Example: If vehicle
do left lane change at left warning, it gets
violation reward (Front and right warning
also)
Collision reward: -10. If collision happens,
it gets collision reward.
To run an autonomous driving system, Agents can
take the following 5 actions: Do nothing,
Acceleration, Deceleration, Lane change to left lane,
and Lane change to right lane.
ENASE 2021 - 16th International Conference on Evaluation of Novel Approaches to Software Engineering
374
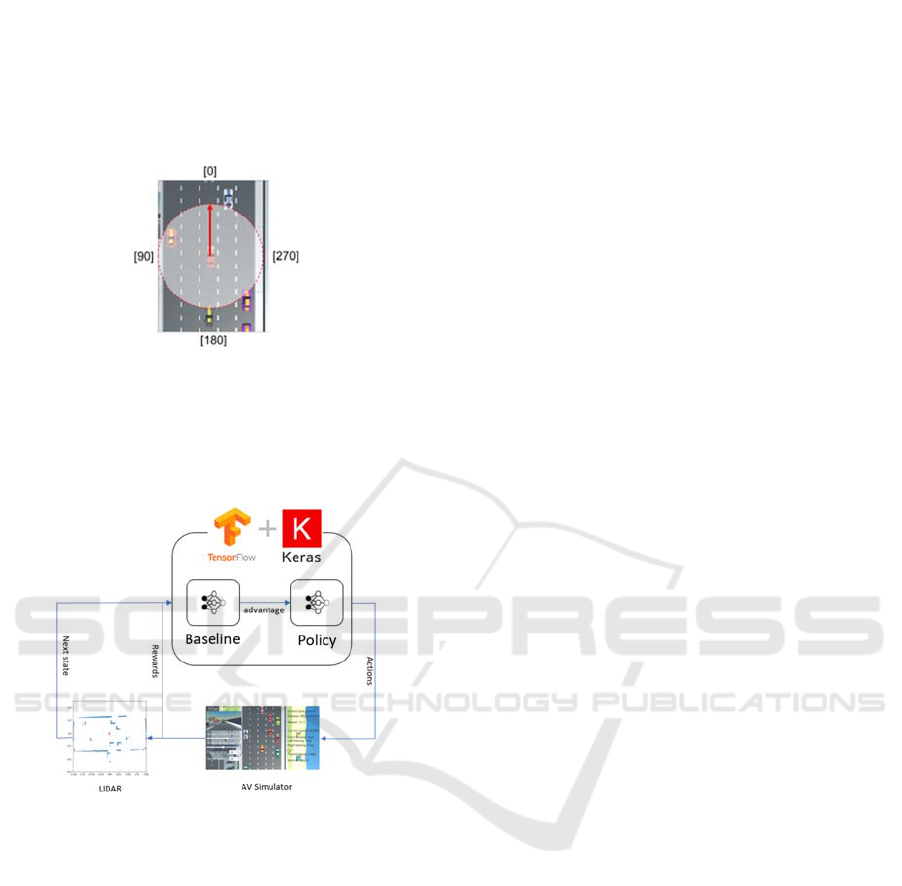
The Agents will receive the environment
information through LIDAR sensor, which provides
the distance of 360 degrees of the vehicle’s
surroundings. LIDAR is positioned looking forwards.
Therefore, the 0 degree corresponds to the distance
between the vehicle and an obstacle in front. Figure 3
shows the vector position of the LIDAR degrees.
Figure 3: LIDAR’s vector’s position.
A multilayer perceptron with 1 to 2 hidden layers will
be used as policy. The input for it will be 16 states of
the LIDAR’s range. Figure 4 summaries the process
of this simulation.
Figure 4: The process of the simulated AV control.
4 SOME CRITERIA OF
SIMULATORS FOR
AUTONOMOUS VEHICLES
The choice of an adequate environment for simulation
is a key step. The simulator will determine the
measure got from the model, and therefore it can
performance results of an inputted problem.
Currently, there exist many of simulators in almost all
the fields of robotics, due to its importance in the
development of control algorithms. To choose an
appropriate simulator, it has to satisfy some specific
characteristics which may impact on the development
of the simulation:
The Abilities of Simulator:
o Scenarios: the scenarios can be controlled
by the simulator, such as urban road,
highway, city, with other vehicles,
pedestrians, etc.
o Sensing Measurements: The performance of
data from the vehicle or the environment the
simulator, such as LIDAR, Radar,
Odometer, Cameras, other sensors, position,
velocity, etc.
o Functions: the status of vehicle which can be
controlled by the simulator, such a reset
environment, accelerate time, control
number of steps, etc.
o ML Integration: The ML techniques were
integrated in the simulator and how to it
support those ML’s algorithms/libraries.
Criteria for Software Evaluation:
o Understandability: this is one of the most
important characteristics of software quality
because it can influence the cost or reliability
of software evolution in reuse or
maintenance.
o Usability: this criterion shows the ability to
apply for using in the practice.
o Installation: the requirements of software
and hardware for the simulator, and how
straightforward is the installation in a
supported system.
o Portability: This is the level of difficulty to
work with the same project with different
computers.
Those criteria help to choose an appropriate
simulator to measure models of autonomous vehicles.
They can get an adequate simulation environment to
experiment adequately, meet the needs of testing and
reduce the cost of testing. Based on those criteria,
there are some simulators to control an autonomous
vehicle on a road as follows:
AirSim Simulator (2021), which is a simulator by
Microsoft, comes with a detailed 3D urban
environment that includes a variety of diverse
conditions, including traffic lights, parks, lakes, and
construction sites. It also contains an open world,
realistic environments, multi vehicles, etc.
Apollo Simulator (2021) is a product of Baidu. It
allows users to input different road types, obstacles,
driving plans, and traffic light states. Developers can
create realistic scenarios that support the verification
of multiple modules such as perception, and planning,
plus traffic flows that provide rigorous testing for
algorithms.
Carla (2021) has been built in the collaboration of
Intel Labs, Toyota Research Institute and CVC
Barcelona, for flexibility and realism in the rendering
and physics simulation. The environment is
composed of 3D models of static objects such as
A Method of Deep Reinforcement Learning for Simulation of Autonomous Vehicle Control
375
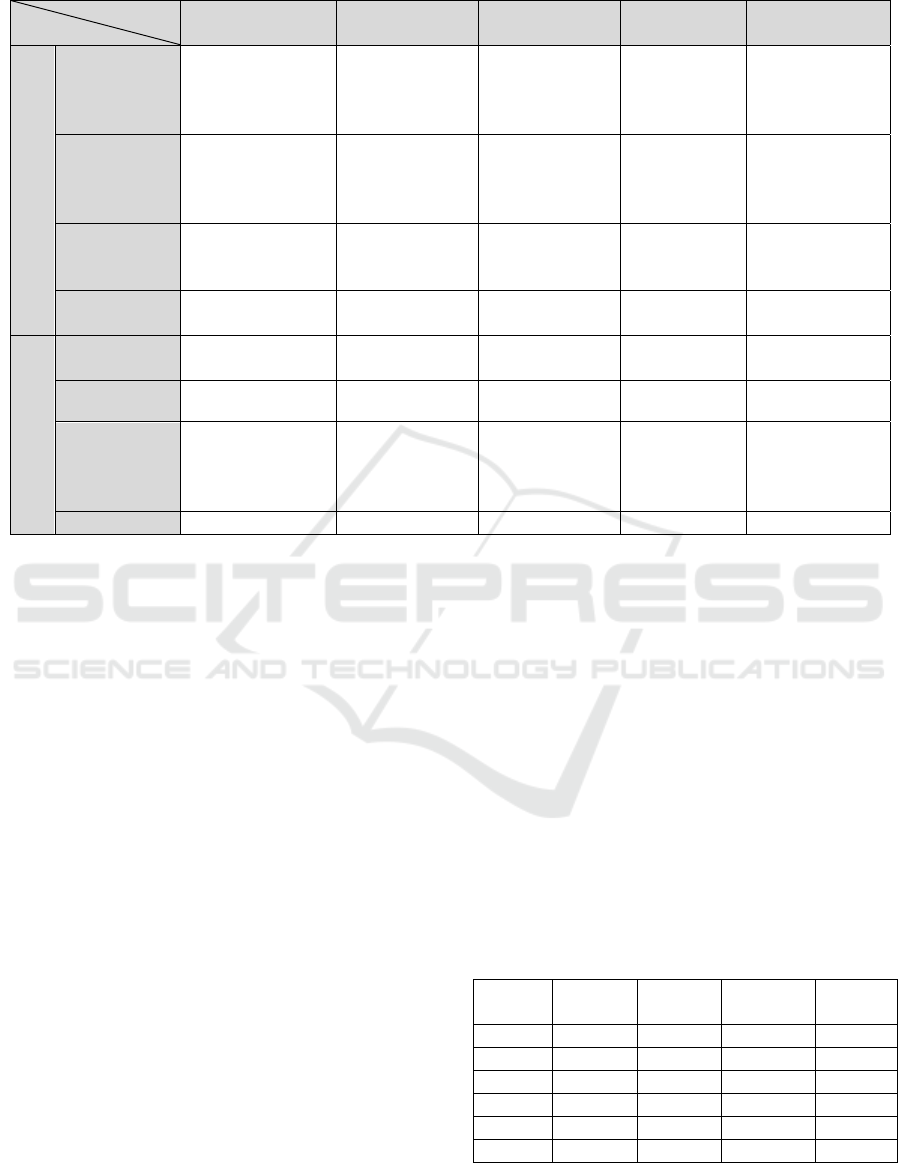
Table 2: Comparison between simulators.
Simulator
Criteria
AirSim Apollo Carla Metacar
Unity ML-
Agents
Simulator ability
Scenarios
Complex 3D
urban
environment
Complex 3D
environment
and deep
custom ability
3D models of
static objects in
high level of
complexity
2D urban road
with ability to
custom
2D urban road
with 5 lanes in
the same
direction
Sensor
Pose and images.
IMU, LIDAR
Laser Point and
Image-Based
Obstacle
Detection
RGB cameras
and pseudo-
sensors
Front LIDAR
Camera and 360
degrees LIDAR
Function Basic level High level High level
Basic level
(unable to
accelerate)
Basic level
(unable to
accelerate)
ML
Integration
Support Support Support Support Support
Software Evaluation
Understanda
bility
Complex Complex Complex Easy Medium
Usability High High High Medium High
Installation
High computer
capacities
required
High
computer
capacities
require
d
High computer
capacities
required
No
installation
required
Mediu
m
computer
capacities
require
d
Portability Unable Unable Unable Able Unable
buildings, vegetation, traffic signs, and infrastructure,
as well as dynamic objects such as vehicles and
pedestrians. Implemented a basic controller that
governs non-player vehicle behaviour.
Metacar Simulator (2021) is a RL environment for
self-driving cars in the browser created by Thibault
Neveu. The environment has an urban road with two
paths with two directions. The library lets you create
your own levels and personalize the environment to
create your desired scenario.
Unity ML-Agents Highway Simulator (2021) is
proposed in (Min et al., 2019). It was built based on
Unity ML-Agents in order to test RL algorithms of
AV navigation on a highway. The main idea is to
reproduce the behaviour of a crowded highway. The
environment has a straight highway with five lanes of
the same direction.
The results of Table 2 show that AirSim, Apollo
and Carla are all powerful simulators. However, the
understanding of their implementation are complex.
In contrast, Unity ML-Agents Highway Simulator
has some advantages:
Implementation: It uses Unity engine, so it can
run in many kinds of operator systems.
Code language: This simulator can use Python
code, which is a very commonly programming
language, as an environment programming.
ML oriented: The implementation using Unity
ML-Agent makes it more convenient to
implement RL algorithms.
Those advantages are reasons for selecting Unity
ML-Agents Highway as an environment simulator to
test and experiment the controlling simulated cars via
reinforcement learning based on Policy Gradient.
5 EXPERIMENTAL RESULTS
This section presents some experimental results when
implementing proposed method was focused on using
LIDAR data as the agents input. The implementation
uses 06 (six) different configurations for learning
rate, batch size, and neural network structure. Each
configuration has been trained 3000 episodes ~ 10M
steps. Detail information of each configuration are
shown as Table 3:
Table 3: Detail information of configurations.
No
Hidden
layer 1
Hidden
layer 2
Learning
rate
Batch
size
1 64 None 0.01 10
2 32 32 0.01 10
3 64 None 0.001 1
4 64 None 0.01 1
5 128 None 0.01 10
6 88 None 0.01 10
The first configuration is the very commonly used
parameters in PG. The configuration 2 aimed to
ENASE 2021 - 16th International Conference on Evaluation of Novel Approaches to Software Engineering
376
evaluate how a “deeper” network affects to
performance, so it is added more hidden layer. The
configurations 3 and 4 are modified the value of
learning rate and batch size to clarify how these
factors affect the result. In configuration 5, the
Agents were provided with the latest 4 states. With
more information from the past, we want to know
how the model gets improves. Also, the Agents in the
configuration 6 were received additional information
from the environment, such as host vehicle speed,
front and side warning, distance to front vehicle,
speed of the front vehicle.
After 3000 episodes ~ 10M steps training for each
configuration, the results are very clear as follows:
Table 4: Results of experiments.
No. Speed Mean reward Lane changes
1 70.94346 0.76279 23.432
2 70.92849 0.74529 17.61
3 70.49962 0.73969 23.494
4 70.67611 0.73749 17.48
5 71.19511 0.75842 16.716
6 71.318 0.77 15.512
As the results in Table 4, the configuration 1 made
a pretty good result. In addition, the result of Deep Q-
Network using the LIDAR data of the simulator
creator reaches the average speed of 71,3758 km/h.
However, there are two things to be aware of. First,
the result that the creator took is an average of 100K
steps ~ 33 episodes. The model, which has trained
3000 episodes, was tested to run 100 episodes twice.
The difference of these two results is approximately
1-2 km/h, so 100 or less is not enough to determine
quality of the model. Besides, while the configuration
1 only uses LIDAR data, the creator obtains 71,3758
km/h by using not only this data, but also some other
information, such as host vehicle speed, front and side
warning, distance to front vehicle, speed of front
vehicle. Another noteworthy point is that the
configuration 1 learned to use action “do nothing” to
avoid violation reward when it detects vehicles
around.
There is nothing remarkable in the result of the
configuration 2. It somewhat learned how to restrict
lane change, but did not learn how to avoid violation
reward, so it lost a lot of reward compared to
configuration 1.
With a small learning rate in the configuration 3,
the model quality changes a little, and is more stable
compared to configurations 1 and 2. However, the
weakness is that its average speed of 70 km/h in
episode 2131, compared to configuration 1 in episode
1144 and configuration 2 in episode 978. That means
the configuration 3 requires more sample data. It is
obviously that with a high learning rate, the algorithm
becomes unstable, the model quality is constantly
changing during the training process.
The result of the configuration 5 exceeds the 71
km/h, with a little lane change. Also, that
configuration is much more stable than
configurations 1 and 2 despite of having the same
learning rate and batch size. Another noteworthy
point is that the configuration 5 achieved an average
speed of 70 km/h in episode 797, much faster than the
rest of the configurations.
With additional important information, along with
LIDAR data, the configuration 6 obtained the best
result among the rest configurations.
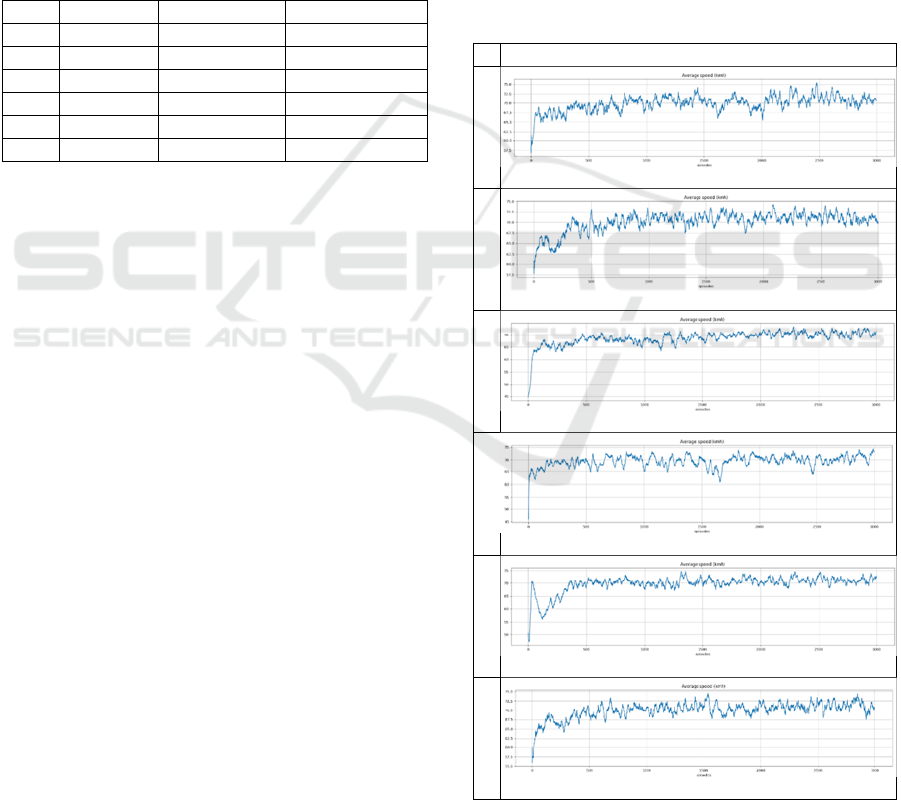
Figures 4 and 5 are the summary of average speed
and action distribution of each configuration
displayed in charts, smoothed by taking an average of
20 episodes to get a more detailed view of the training
process:
Average speed
1
2
3
4
5
6
Figure 5: Charts of average speed of each configuration.
A Method of Deep Reinforcement Learning for Simulation of Autonomous Vehicle Control
377
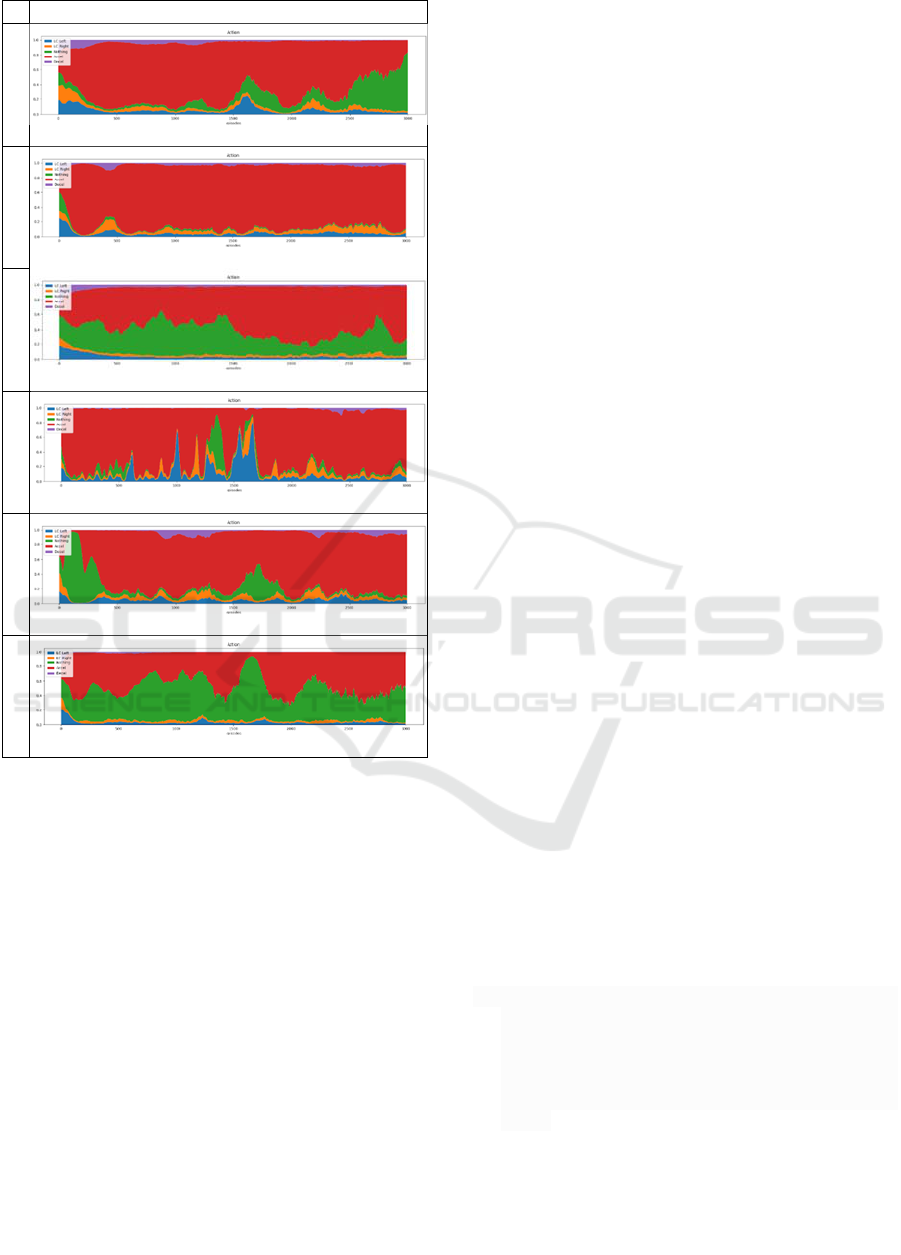
Action distribution
1
2
3
4
5
6
Figure 6: Charts of action distribution.
6 CONCLUSION AND FUTURE
WORK
In this paper, a method to build an autonomous
vehicle navigation system on highways by
incorporating autonomous functions using
reinforcement learning is proposed.
The first step to
implementing the RL algorithm is to find a suitable
simulator for our project. The choosing is done based
on some studied criteria for simulators. After
comparison, Unity ML-Agents Highway Simulator is
arguably the best for the project. At the next step, the
Policy Gradient, which is a RL method, is utilized to
implement an AV navigation system on Unity ML-
Agents Highway Simulator. This implementation not
only includes the basic Policy Gradient algorithm, but
also includes the DQN to overestimate action values
under certain conditions.
After training agents with various configurations,
it can be seen that the algorithm helps driving the
vehicle in the simulator's scenario with an average
speed of 71 km/h and have ability to change lane and
avoid obstacle naturally and safety.
In the future, the improvement of result quality
and reducing of training time would be studied. Some
other types of neural network will be used to enhance
the performance, such as Long Short Term Memory
(Kouris et al., 2020). The proposed method is more
studied to adapt for efficient deployment on other
platforms. Besides, some methods for integrating of
human knowledge into AV navigation system, such
as inference rules (Talamini et al., 2020), knowledge
of computing (Do and Nguyen, 2015) and ontology
integration (Do et al., 2019), will be studied to apply
them in real-world. Moreover, the policy gradient
method is also able to apply to increase the ability of
intelligent systems in e-learning for knowledge
searching (Do et al., 2020, Nguyen et al., 2020b).
ACKNOWLEDGEMENTS
This research is funded by University of Information
Technology – Vietnam National University
HoChiMinh City, under grant number D1-2021-04.
REFERENCES
Airsim, 2021. https://microsoft.github.io/AirSim/ (Access
on 08 March 2021)
Apollo, 2021. https://apollo.auto/platform/simulation.html
(Access on 08 March 2021)
Badia, A., Piot, B., Kapturowski, S., Sprechmann, P.,
Vitvitskyi, A., Guo, Z., Blundell, C., 2020. Agent57:
Outperforming the Atari Human Benchmark. In ICML
2020, 37
th
International Conference on Machine
Learning, vol. 119, April 2020. 507-517.
Carla, 2021. https://carla.org/ (Access on 08 March 2021)
Do, V.N., Nguyen, H.D. 2015. Reducing Model of
COKB about Operators Knowledge and Solving
Problems about Operators. In: Camacho D., Kim
SW., Trawiński B. (eds), New Trends in
Computational Collective Intelligence, Studies in
Computational Intelligence, vol 572. Springer,
Cham.
Do, N.V., Nguyen, H.D., Mai, T. 2019. A Method of
Ontology Integration for Designing Intelligent Problem
Solvers. Appl. Sci. 9(18), 3793.
Do, N., Nguyen, H., Hoang, L., 2020. Some Techniques for
Intelligent Searching on Ontology-based Knowledge
domain in E-learning. In IC3K, 12
th
International Joint
ENASE 2021 - 16th International Conference on Evaluation of Novel Approaches to Software Engineering
378

Conference on Knowledge Discovery, Knowledge
Engineering and Knowledge Management, Vol. 2,
Nov. 2020. SCITEPRESS. 313 – 320.
Hasselt, H., Guez, A., Silver, D., 2015. Deep reinforcement
learning with double Q-learning. In AAAI 2015, 29
th
AAAI Conference on Artificial Intelligence, Jan. 2015.
2094–2100.
Huang, Z., Xu, X., He, H., Tan, J., Sun, Z., 2017.
Parameterized batch reinforcement learning for
longitudinal control of autonomous land vehicles. IEEE
Transactions on Systems, Man, and Cybernetics:
Systems 49(4), 730 – 741.
Huynh, T., Zelinka, I., Pham, H., Nguyen, H.D. 2019. Some
measures to Detect the Influencer on Social Network
Based on Information Propagation. In WIMS 2019, 9
th
International Conference on Web Intelligence, Mining
and Semantics, June 2019. ACM.
Kouris, A., Venieris, S., Rizakis, M., Bouganis, C., 2020.
Approximate LSTMs for Time-Constrained Inference:
Enabling Fast Reaction in Self-Driving Cars. IEEE
Consumer Electronics Magazine 9(4), 11 – 26.
Lin, L.J., 1992. Self-improving reactive agents based on
reinforcement learning, planning and teaching.
Machine Learning 8(3 – 4), 293–321.
Lucarelli, G., Borrotti, M., 2020. A deep Q-learning
portfolio management framework for the
cryptocurrency market. Neural Comput &
Applic 32, 17229–17244.
Marina, L., Sandu, A. 2017. Deep reinforcement learning
for autonomous vehicles - State of the art, Bulletin of
the Transilvania University of Braşov 10(59), 195 –
202.
Metacar, 2021. https://metacar.scottpletcher.guru/ (Access
on 08 March 2021)
Min, K., Kim, H., Huh, K., 2019. Deep distributional
reinforcement learning based high level driving policy
determination. IEEE Transactions on Intelligent
Vehicles 4(3), 416 – 424.
Nguyen, H., Huynh, T., Hoang, S., Pham, V., Zelinka, I.,
2020a. Language-oriented Sentiment Analysis based on
the grammar structure and improved Self-attention
network. In ENASE 2020, 15th International
Conference on Evaluation of Novel Approaches to
Software Engineering, May 2020. SCITEPRESS. 339-
346.
Nguyen, H.D., Tran, D., Do, H., Pham, V., 2020b. Design
an intelligent system to automatically tutor the method
for solving problems. International Journal of
Integrated Engineering (IJIE) 12(7), 211 – 223.
Nguyen, H., Tran, V., Pham, V., Nguyen, H.D., 2021.
Design a learning model of mobile vision to detect
diabetic retinopathy based on the improvement of
MobileNetV2. Int. J. Digital Enterprise Technology
(IJDET), in publishing.
Perez, G., Guerrero, J., Olivas, E., Ballester, E., Palomares,
A., Casariego, N. 2009. Assigning discounts in a
marketing campaign by using reinforcement learning
and neural networks. Expert Systems with Applications
36(4), 8022-8031.
Peters, J., Schaal, S., 2008. Reinforcement learning of
motor skills with policy gradients. Neural Networks
21(4), 682-697.
Pham, X.T, Tran, T.V, Nguyen-Le, V.T, Pham, V.T.,
Nguyen, H.D. 2020. Build a search engine for the
knowledge of the course about Introduction to
Programming based on ontology Rela-model. In KSE,
12
th
International Conference on Knowledge and
Systems Engineering, Nov. 2020. IEEE. 207 – 212.
Sehnke, F., Osendorfer, C., Rückstiess, T., Graves, A.,
Peters, J., Schmidhuber, J., 2010. Parameter-exploring
policy gradients. Neural Networks 23(2), 551 - 559.
Silver, D., Lever, G., Heess, N., Degris, T., Wierstra, D.,
Riedmiller, M., 2014. Deterministic policy gradient
algorithms. In ICML 2014, 31
st
International
Conference on Machine Learning, vol. 32, June 2014.
387–395.
Sutton, R., Barto, A. 2015. Reinforcement Learning: An
Introduction. MIT Press, Cambridge, Massachusetts,
USA, 2
nd
edition.
Talamini, J., Bartoli, A., De Lorenzo, A., Medvet, E. 2020.
On the Impact of the Rules on Autonomous Drive
Learning. Appl. Sci. 10(7), 2394.
United States Environmental Protection Agency (EPA),
2018. Sources of Greenhouse Gas Emissions
https://www.epa.gov/ghgemissions/sources-
greenhouse-gas-emissions (Access on 08 March 2021)
Unity ML-Agents Highway, 2021.
https://github.com/MLJejuCamp2017/DRL_based_Sel
fDrivingCarControl (Access on 08 March 2021).
Watkins, C., Dayan, P., 1992. Q-learning. Machine
Learning 8(3), 279–292.
WHO. 2020. https://www.who.int/news-room/fact-
sheets/detail/the-top-10-causes-of-death (Published on
09 Dec. 2020).
A Method of Deep Reinforcement Learning for Simulation of Autonomous Vehicle Control
379
