
Requirements for a Cybersecurity Case Approach for the Assurance
of Future Connected and Automated Vehicles
Luis-Pedro Cobos
1,2 a
, Alastair R. Ruddle
1 b
and Giedre Sabaliauskaite
2 c
1
HORIBA MIRA Limited, Watling Street, Nuneaton, U.K.
2
Institute for Future Transport and Systems, Coventry University, Coventry, U.K.
Keywords: Assurance, Automotive, Connected and Automated Vehicles, Cybersecurity Case, Vehicle Cybersecurity.
Abstract: Cybersecurity is an issue of increasing concern for emerging connected vehicles. Ensuring public trust in
future connected and automated vehicles will require very high levels of confidence in their dependability,
which will include cybersecurity assurance. In functional safety engineering, the safety case has become a
widely used approach to describing and documenting safety assurance arguments and their supporting
evidence. The use of a similar security case can also be considered in cybersecurity engineering, but there are
significant differences between safety and cybersecurity. Cybersecurity impacts include, but are not limited
to, possible safety issues. Furthermore, the cybersecurity threats arise from the ingenuity of human attackers,
and available technology, with the result that they are constantly evolving. This paper proposes the use of an
assurance case approach for cybersecurity and outlines the particular requirements that are considered to be
necessary for the development of such a cybersecurity case.
1 INTRODUCTION
The connected car is not a thing of the future.
Commercially, the industry is already rolling out
connected vehicles with highly capable electronics
and software to match. Furthermore, the driving
functions are becoming increasingly automated, with
the desired end-game being fully automated driving.
These connected and automated cars are not simply
computers on wheels as they must also be aware of
obstacles (including other vehicles) and vulnerable
road users (cyclists, pedestrians, etc.) in their
environment. Software is increasingly key to enabling
these technologies and offers the potential for
through-life upgrades that will lead to future vehicles
being in a state of evolution, rather than a static
product. However, being close to a computer and
being part of the Internet-of-Things introduces the
potential for cybersecurity threats. As vehicles are
also providing increasingly automated driving
functions, some cybersecurity threats could result in
adverse safety impacts.
a
https://orcid.org/0000-0002-1333-7767
b
https://orcid.org/0000-0003-4425-0979
c
https://orcid.org/0000-0003-1183-7001
Ensuring the public acceptability of connected
and automated vehicles will require considerable
confidence to be established in their cybersecurity
and safety characteristics, as well as their basic
functionality. Traditional methods of assuring key
performance characteristics such as safety involve
demonstrating compliance with a very specific and
set of criteria using standardised methods before
product launch. However, current trends such as the
increasingly rapid pace of technological change,
increasing system complexity, adoption of non-
deterministic machine learning technologies, and
through-life system modifications are making the
traditional assurance model untenable. Moreover,
cybersecurity is subject to the additional difficulty
that the “operating environment” involves the
ingenuity of human adversaries in seeking out
vulnerabilities to exploit in order to attack normal
vehicle operation. This, together with the interest in
through-life software updates, leads to the conclusion
that future vehicle assurance must become an ongoing
process throughout the vehicle lifecycle, rather than a
more limited procedure prior to product launch.
626
Cobos, L., Ruddle, A. and Sabaliauskaite, G.
Requirements for a Cybersecurity Case Approach for the Assurance of Future Connected and Automated Vehicles.
DOI: 10.5220/0010478606260633
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 626-633
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
Based on past experience from safety engineering,
it is argued here that the best way to be demonstrate
this would be through the development of an
assurance case for cybersecurity. Like a legal case, a
safety case presents a justified and reasoned argument
that the safety risks associated with using the vehicle
are considered to be acceptable at product launch. A
cyber security case would similarly argue that the
cybersecurity risks associated with using the vehicle
are deemed to be acceptable at product launch, and
that appropriate measures are in place to ensure that
any emerging threats can subsequently be identified,
assessed and, where necessary, mitigated in a timely
fashion.
This paper provides an overview of relevant
technological trends within the automotive industry,
primarily the expansion of wireless connectivity and
the emergence of ongoing software updates for
modifying vehicle functionality, as well as the merits
and limitations of existing safety case techniques, in
order to identify requirements for an analogous
cybersecurity case to demonstrate cybersecurity
assurance for future vehicles.
2 RELEVANT DEVELOPMENTS
This section outlines industry developments that are
relevant to the requirements for a cybersecurity case.
2.1 V2X Communications
A connected car is a vehicle capable of
communicating bidirectionally with other systems
outside of the car. Connected car protocols are known
collectively as Vehicle-to-everything (V2X) or
Car2X and C2X (Cui, 2019). There are two types of
application of V2X:
• Single vehicle applications: this type of
application concerns information obtained for
the vehicle to use by itself.
• Cooperative safety and efficiency applications:
these are use cases in which a vehicle learns
something that it could also potentially
communicate to another vehicle or entity for
their benefit.
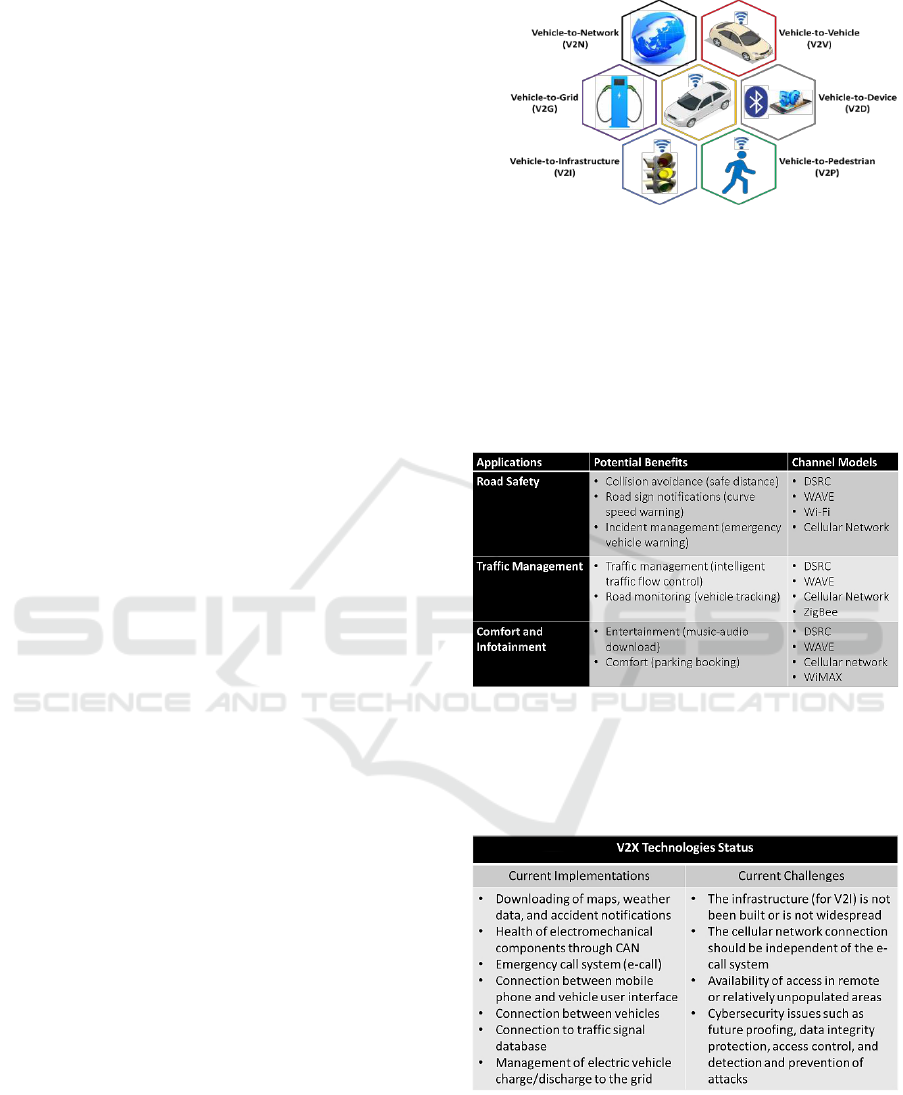
The concept of V2X encompasses a wide range of
interactions, as illustrated in Figure 1. The original
purpose of V2X was to increase the safety of the
vehicle by expanding its field of vision to more than
just what it perceives with vehicle-based sensors in
the immediate surroundings, into a wider vision
through connecting with other information systems
(Wang, 2018). V2X will probably be a standard
safety feature in the coming years (Macher, 2017).
Figure 1: Examples of V2X technologies.
Some examples of V2X applications are listed in
Table 1, including description of their potential
benefits and the communication channels used for
these applications. This shows that, even if 5G seems
like the option that has the most followers, there are
also other ways to achieve communication.
Table 1: Example uses of V2X applications.
Current V2X implementations are summarized in
Table 2 below, which also indicates some of the
associated challenges.
Table 2: Current status of V2X technologies.
Wireless connectivity offers great benefits in
terms of improved services and functionality.
However, it also opens the vehicle up to a wide range
of potential cybersecurity threats.
Requirements for a Cybersecurity Case Approach for the Assurance of Future Connected and Automated Vehicles
627

2.2 Driving Automation
Vehicle systems comprise a number of Electronic
Control Units (ECUs) that are tasked with controlling
a specific vehicle function or a particular set of
functions. These ECUs communicate with each other
through a central gateway unit linked to a number of
different buses (like CAN or LIN) that allow
communication flows within different domains.
These electronic control capabilities are now
being combined with advanced sensor technologies
and information obtained from V2X communications
in order to automate driving tasks. At present this is
mostly in the form of advanced driver assistance
systems (such as parking assistance, adaptive cruise
control, lane keeping assistance etc.). However, the
expected end game is full automated driving under all
road conditions.
Driving automation offers significant benefits to
society in removing the potential for human error,
which is the main cause of road accidents. However,
it also opens the vehicle up to a wide range of
potential cybersecurity threats.
2.3 Software Updates
Nowadays, even everyday vehicles contain software
that is updated, such as infotainment systems or
digital cockpits. We can summarize the main reaches
of software updates as:
• Customer: Device interaction (smart phones,
tablets) or User Interface.
• Cloud: Connection to online servers for satellite
and weather info or connecting to a 5G network
for road data.
• Service and Repair: Fault diagnosis or the
addition of new features.
• Management: Provision of administration data,
manufacturing distribution notes, and IT
security.
These updates can be more frequent, efficient and
faster (due to smaller size) if they are done by
connecting online and installing in the background.
An Over-The-Air (OTA) update is the wireless
delivery of new software or data to a device. The
conditions to achieve and perform a wireless
Software (SW) update requires the Diagnostic Tester,
an element possessing the current and newer software
versions and all required keys to authorize the update,
to connect the vehicle to the OEM using automotive
diagnostic protocols such as Unified Diagnostic
Services. The remaining process comprises three
steps (Steger, 2018):
i. Initialize the update process and validate and
authorization for the update.
ii. Transfer the binary to the ECU.
iii. Override and flash the ECU.
These steps normally happen locally and remotely
in an authorized garage or a service centre, using Wi-
Fi (Shavit, 2007).
The greatest challenge of software updates is how
to make them secure. There are two main ways to do
so; namely, the blockchain and certificate-based
approaches. Both approaches seem to have similar
properties with respect to the added latency as well as
the total number of packets exchanged (Steger, 2018).
The certificate-based approach uses a certificate to
check the keys and updates depends on whether the
certificate is signed or unsigned. The blockchain
algorithms are well known in cryptocurrency and
video game matchmaking applications. They work by
appending new data blocks into each existing data
block, thus decentralizing the process while changing
and reallocating the need of private keys.
Through-life software updates offer great benefits
in terms of improved service and functionality. In
addition, they allow the implementation of patches
that may be needed to ensure ongoing vehicle safety
and cybersecurity. This points to the need for
cybersecurity assurance to become an on-going
process throughout the operational life of the vehicle,
rather than the conventional, largely pre-launch,
activity.
3 VEHICLE CYBERSECURITY
A connected car becomes a target for cyber security
threats, and although safety is an important
consideration in relation to cybersecurity threats,
cybersecurity has a much wider scope than safety
alone. Deliberate attacks on vehicle data may also
have other potential implications, such as:
• infringement of privacy (including Intellectual
Property Rights protection);
• possible economic aspects, such as fraudulent
financial transactions;
• the loss of availability for key functions that,
although not safety-related, are nonetheless
regarded as mission-critical for the vehicle.
Various types of security attack that could be
deployed against vehicles are summarized in Table 3.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
628

Table 3: Main types of cybersecurity attacks applied against
vehicles.
3.1 Potential Threats
The main threats of cybersecurity are authenticity,
availability, data integrity, and confidentiality.
Authenticity or identification means data was
generated by legitimate entities and the location
matches, eventually ensuring integrity. Availability
means information is provided as required in real
time. Data integrity or data trust means no
unauthorized alteration during generation or
transmission. Confidentiality means that data are
never disclosed to someone unauthorized (Cui, 2018).
A further consequence of cybersecurity concerns,
as well as of increasing reliance on software controls,
is that the need for software updates will become
increasingly common. Furthermore, the ability to
modify vehicle software could also be of interest as a
new business opportunity, by providing the
possibility of remote vehicle upgrades and/or
differentiation, resulting in a “software defined
vehicle”. However, software updates are also a
potential source of new safety issues, as well as
providing a further entry point into vehicle systems
for malicious attackers.
As the deployment of wireless connectivity and
environment sensors rises in automated vehicles, they
are expected to become increasingly susceptible to
faults and failures due to cyber-attacks. Such attacks
may be achieved by external manipulation (e.g.
jamming, spoofing, replay etc.) of sensor inputs,
GNSS data, and V2X communications. Access to in-
vehicle networks may also enable direct control of
vehicle functions.
The increasing use of artificial intelligence (AI)
technologies in support of automated driving systems
brings unique vulnerabilities, for both safety and
cybersecurity, that have yet to be adequately resolved.
For example, corruption of the training data for AI
systems is a conceivable attack.
3.2 Standards and Regulations
Preliminary recommendations relating to vehicle
cybersecurity are already available (e.g. SAE J3061,
which recommends a risk-based approach) and more
comprehensive regulations and standards are
currently emerging or under development.
Type approval regulations concerning
cybersecurity have recently been published (UNECE
Regulation 155), which include requirements for
vehicle cybersecurity risk analysis and an associated
cybersecurity management system, while
intentionally avoiding any mandate on specific
technical measures. This approach is therefore goal-
based (see section 4.2), requiring the demonstration
of achievement of a goal described in terms of risk
using any suitable methods, rather than the traditional
prescriptive assurance method (see section 4.1) of
requiring compliance with particular performance
criteria using specified methods.
In response to the emergence of Regulation 155,
the automotive cybersecurity standard ISO/SAE
21434 is currently under development, with formal
issue expected by mid-2021. Created to take in
account the trend towards greater networking of
vehicles and the focus on embedded platforms, the
standard addresses the protection of vehicles from
threats associated with the classic IT environment.
This standard covers the entire development process
and life cycle of a vehicle, in a similar way to the
functional safety standard ISO 26262 and ISO/PAS
21448 for Safety of The Intended Functionality. The
ISO/SAE 21434 standard similarly recommends a
structured threat analysis and risk assessment.
In addition, it is anticipated that by 2025
consumer tests like NCAP (New Car Assessment
Program) will also expect a certain level of
cybersecurity to be demonstrated by manufacturers.
4 DEPENDABILITY AND
ASSURANCE
In order for connected and automated vehicles to be
successfully adopted there is a need to establish
public trust in them. To be trusted they need to be
dependable, and their dependability needs to be
assured. In this context dependability is the ability to
perform (i.e. deliver the required functionality, safely
and securely), as and when required (Ruddle, 2020).
Assurance is the set of justifiable grounds for
confidence that the risks of using a product, process
or service are acceptable to the stakeholders.
4.1 Prescriptive Assurance
The traditional approach (Kelly, 2005) to product
assurance is highly prescriptive, based on standards
Requirements for a Cybersecurity Case Approach for the Assurance of Future Connected and Automated Vehicles
629

that detail not only the required performance criteria,
but also specifying exactly how performance is to be
demonstrated. Establishing assurance is then a simple
case of demonstrating compliance with standards.
Prescriptive assurance approaches may be applied
either to specific product features or to associated
development processes:
• Product Assurance Standards generally detail
specific performance criteria that are required,
as well as how they are to be demonstrated, and
therefore reflect specific technologies, designs
or features. Achieving assurance is then based
on demonstrating compliance of the products
with these requirements.
• Process Assurance Standards describe
features of the process that is to be used in
producing a product, rather than specific
performance criteria or design features.
Assurance is then based on establishing whether
the process was followed, and often on the
quality of the process and its outputs.
For the automotive industry, type approval within
Europe and many other territories is achieved by
demonstrating compliance with UNECE regulations.
This type of approach is well-known and
understood, with clear advantages in terms of
simplicity and transparency. It is very well suited to
relatively simple systems with few functions.
However, the prescriptive approach becomes
increasingly difficult as the complexity of the target
system rises, resulting in a richer set of functions and
such large numbers of states that comprehensive
testing is no longer a practicable option. In addition,
this approach can lead to an excessive focus on
simply passing the test, which can lead to the
exclusion of wider considerations that the spirit of the
test is intended to be representative of, or even
fraudulent activity, as discovered in the recent
scandal concerning gaseous diesel engine emissions.
A further limitation is that the prescriptive
approach is inevitably technology-centric, since it
aims to specify the details of how and what are
required to be done. This makes it difficult for
prescriptive standards and regulations to adapt to new
technology, since the acceptance criteria and
validation methods are so closely related to the
anticipated technology of the product. As different
technological solutions emerge, the number of
standards and regulations must multiply to
accommodate the newer options. This rising number
of standards may be further multiplied by territorial
differences. As the pace of technological change is
becoming increasingly rapid, the standards
management burden of the prescriptive approach will
become increasingly unmanageable unless a more
efficient alternative is used to limit the need for
changes more effectively.
4.2 Goal-based Assurance
The limitations of the prescriptive approach have
resulted in the emergence of an alternative assurance
approach more recently, which is based on specifying
more generic goals that are to be achieved (Kelly,
2005). These goals are technology-agnostic and are
often specified in terms of risk. The goal-based
approach is less straightforward to apply than
prescriptive methods, as it requires the construction
of a specific justification of compliance, the merits of
which must be judged.
The goal-based assurance approach is more
readily comprehended using the notion of claim-
argument-evidence. Based on approaches developed
in the analysis of structured argument styles
(Toulmin, 1958), justification for achievement of the
goal should be shaped using the following elements:
• Claims, assertions that are not immediately
self-evident, but must be judged on the quality
of the supporting argument and evidence.
• Argument, a coherent chain of thought that
presents the claim as a logical conclusion based
on the available evidence.
• Evidence, specific data and other established
facts, assumptions or contextual information
that provide the grounds for the claim.
• Rebuttals, possible counterarguments that
result in a different conclusion to the claim.
Thus, constructing the argument can be a way of
identifying the nature of specific evidence that is
required to be obtained, such as performance data.
Alternatively, an argument could be crafted to exploit
the available evidence.
4.3 Safety Case
A common approach to presenting the justification
for a claim of compliance with an assurance goal is to
construct an assurance case. The purpose of the
assurance case is to present a valid and convincing
chain of argument to justify a claim that is based on
the evidence presented in support of the claim. In
many cases, typically safety-related, the certification
process requires the assurance case to be subject to
independent audit by an appropriately qualified and
knowledgeable external party.
The safety case is a commonly employed
approach in automotive functional safety (Ward,
2013) and many other sectors (e.g. rail, aircraft) that
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
630

are required to achieve risk-based goals. With the aim
to justify claims that the risks associated with using a
product, process or service are acceptable to the
stakeholders, a safety case is a living document
assuring a system’s critical properties. It provides and
documents a convincing and valid argument that a
specified set of critical claims regarding the safety
properties of a product, process or service are
adequately justified for a given application in a given
environment. A safety case must be clear in
communicating the ideas to be convincing and
acceptable; and acceptable does not mean absolutely
safe, as that is theoretically impossible, but safe
enough, with tolerable residual risk (Kelly, 2004).
Safety cases have been implemented in many
ways, including natural language (Tanguy, 2016),
structured natural language (Giannakopoulou, 2020),
and graphical formats such as the Goal Structured
Notation (GSN) (Kelly, 2004). Graphical approaches
more naturally provide for a hierarchical presentation
of the assurance case than purely natural language
documents.
However, a number of concerns about the
effectiveness of the safety case approach have been
raised, including the tendency towards “box-ticking”,
potential for confirmation bias, and a lack of focus on
uncertain aspects and potentially unsafe behaviour
(Leveson, 2011). Nonetheless, the safety case
approach is widely used, including within the
automotive industry, is familiar to regulators and
assessors, and fits naturally with one of the four
potential impact factors for automotive cybersecurity
considerations (i.e. safety). The safety case therefore
provides a natural model that could be adapted and
extended for cybersecurity (Armstrong, 2011).
5 CYBERSECURITY CASE
A goal-based approach with risk-based targets, like
that used in functional safety assurance, seems
inherently well suited to cybersecurity, where the
threat (the equivalent of a hazard in safety) is even
less readily defined.
A risk analysis approach for automotive
cybersecurity was adapted from automotive
functional safety concepts in the context of the EC
project EVITA (Ruddle, 2016). In this scheme, the
hazard severity notion of automotive functional
safety was extended to encompass the wider
implications of cybersecurity threats, whilst the attack
potential concept of cybersecurity was exploited as a
proxy for threat likelihood to allow qualitative risk
rankings to be derived. This approach, as well as a
number of other cybersecurity risk assessment
methods, are outlined in SAE J3061.
Cybersecurity threats depend on technology and
on human ingenuity and motivation to interfere with
the correct functioning of that technology. Some
threats will be foreseeable, so can (and should) be
addressed before product launch, but unforeseeable
threats are highly likely. The unforeseeable threats
can only be responded to reactively, so cybersecurity
assurance inevitably needs to become an ongoing
process, throughout the operational life of the vehicle.
5.1 Cybersecurity Case Requirements
Based on emerging technological trends in the
automotive industry, as well as current functional
safety engineering practices (as outlined above), it is
considered that an assurance case for automotive
cybersecurity should ideally provide the following
basic characteristics:
1. Unified approach with existing safety case
techniques – since potential safety impacts are
also associated cybersecurity threats and
efficiency can be maximised by exploiting
existing familiarity with safety case techniques,
facilitating the reuse of common arguments and
supporting evidence where possible.
2. Ability to address aspects beyond traditional
safety – including availability of mission-
critical (rather than safety-related) functions,
privacy issues, fraudulent financial transactions,
and indirect safety implications (such as
kidnapping) that are beyond the remit of more
traditional safety analysis.
3. Ability to adapt to emerging threats – to cope
with the inevitability of threats emerging that
were unforeseeable at design time, including
those that may result from the implementation
of software updates during the operational life
of the vehicle.
4. Ability to integrate cybersecurity analysis – as
essential sources of argument and evidence, as
well as their limitations.
5. Support probabilistic risk analysis – to cope
with system complexity and the significant
uncertainties of cybersecurity analyses.
6. Provide explicit visibility of uncertainties – in
order to provide a more balanced view of the
limitations of the arguments that are presented
for independent audit.
7. Hierarchical structure – to help cope with wide
scope of the analysis, system complexity, and
readability.
8. Graphical approach – to help cope with the wide
scope of the analysis, system complexity, and
readability.
Requirements for a Cybersecurity Case Approach for the Assurance of Future Connected and Automated Vehicles
631

9. Dynamic, living document – will need to be
readily adapted throughout development and
operational lifecycles to reflect the impact of
software updates and security patches.
10. Modular construction – to allow the impact of
system changes to be assessed efficiently and
the cybersecurity case to be updated.
11. Support for emerging legislation – to provide a
convenient path for demonstrating compliance
with relevant standards and regulations, such as
the UNECE Regulations 155–156, and
ISO/SAE 21434.
5.2 Differences from Safety Cases
In adapting the safety case notion to cybersecurity,
the main difference is that a cybersecurity case has to
address a much wider scope, being concerned not just
with the safety implications of deliberate attacks, but
also with the availability of non-safety functions,
potential for privacy infringement, and possible
financial losses due to fraudulent transactions. These
separate aspects could be individually treated but
combined in a hierarchical assurance case. It is likely
that the individual cases they would draw on common
argument structures and evidence streams, resulting
in an interlinked web-like structure.
Another significant difference is that, unlike
safety, the operational environment is subject to
ongoing change and evolution, as new threats emerge
and technology progresses. This leads to a need for
through-life monitoring, to detect cybersecurity
breaches, assess their risks, and respond to them in a
timely fashion (where the risk analysis suggests that
mitigation is necessary). This will “provide lessons
learned” to contribute to future cybersecurity design
and risk analysis, but will also require the security
case to be updated to reflect current system
knowledge.
Nonetheless, in the same kind of manner any
software update that the vehicle receives, even if it is
upgrading a safety function already evaluated through
a safety case, would require the re-evaluation of both
the safety and cybersecurity cases.
A further difference to be considered is that,
during development the consideration of safety and
security issues should happen in parallel, yet may not
do so. This can happen because of the requirements at
the start of production will not necessarily align with
the final builds for all the software. However, in both
safety and cybersecurity it is more effective to initiate
the analysis as early as possible in the vehicle
development process.
5.3 Challenges for Assurance Cases
Significant challenges faced in developing assurance
cases, for both safety and cybersecurity applications,
include the following:
• Linking to evidence, while being able to identify
bias.
• Handling the non-deterministic behaviour of AI
systems – how can we argue the safety and
cybersecurity of these technologies, and what
kind of evidence would be required to support
these arguments?
• How to handle evolving systems – e.g. due to
SW updates or unsupervised learning by AI?
• How to provide a balanced view of the
limitations of such a case, such as by including
and explicitly showing the failure of possible
counter-arguments, such as for “non-safety”
(Leveson, 2011).
• Assurance cases need to provide a better and
more explicit handling of uncertainty and the
limitations of the arguments that are presented.
• There needs to be a deeper understanding of
where formal methods might add value.
6 CONCLUSIONS
Connected and automated vehicles are expected to
provide many benefits to society, but the enabling
technologies are also associated with new threats,
particularly in terms of cybersecurity. Ensuring
public trust in future connected and automated
vehicles will require very high levels of confidence in
their dependability, which will include cybersecurity
assurance. Traditional prescriptive assurance
strategies are not practicable for establishing
automotive cybersecurity performance. The
anticipated constant evolution of both on-board
technology and attack techniques also means that
conventional pre-product launch assurance activities,
while still of great importance, will not be sufficient
to provide the necessary assurance. Cybersecurity
performance metrics can only be expressed in terms
of risk, with cybersecurity assurance aiming to both
contain the known risks to tolerable levels and
provide a mechanism for identifying and responding
to emerging threats. This is reflected in the risk-
based, goal oriented, and ongoing assurance approach
now mandated in UNECE Regulation 156 for vehicle
type approval.
A dynamic and modular cybersecurity case
approach, adapted and extended from existing safety
case approaches such as those used in automotive
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
632

functional safety, could provide a useful mechanism
for both recording and maintaining cybersecurity
assurance claims. This paper has identified a number
of essential requirements for a cybersecurity case for
automotive applications, and differences from safety
cases, as well as a range of particular challenges that
will need to be overcome in future, for both safety and
cybersecurity applications.
ACKNOWLEDGEMENTS
The research leading to these results has received
funding from the European Union’s Horizon 2020
research and innovation programme under the Marie
Skłodowska-Curie grant agreement No 812788
(MSCA-ETN SAS – Safer Autonomous Systems).
This publication reflects only the authors’ view,
exempting the European Union from any liability.
Project website: http://etn-sas.eu/.
REFERENCES
Armstrong, R., Hawkins, R. & Kelly, T. (2011). Security
Assurance Cases: Motivation and the State of the Art.
University of York Report CESG/TR/2011/1, April 2011
http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.
1.221.456&rep=rep1&type=pdf.
Cui, J., Liew, L. S., Sabaliauskaite, G., & Zhou, F. (2018).
A review on safety failures, security attacks, and
available countermeasures for autonomous vehicles. Ad
Hoc Networks, 90 (December 2018), 101823. https://
doi.org/10.1016/j.adhoc.2018.12.006.
Cui, J., Sabaliauskaite, G., Liew, L. S., Zhou, F., & Zhang,
B. (2019). Collaborative Analysis Framework of Safety
and Security for Autonomous Vehicles. IEEE Access,
7 (March 2018), 148672–148683. https://doi.org/
10.1109/ACCESS.2019.2946632.
Giannakopoulou, D., Pressburger, T., Mavridou, A., &
Schumann, J. (2020). Generation of Formal
Requirements from Structured Natural Language. In N.
Madhavji, L. Pasquale, A. Ferrari, & S. Gnesi (Eds.),
Requirements Engineering: Foundation for Software
Quality (pp. 19–35). Springer International Publishing.
https://doi.org/10.1007/978-3-030-44429-7_2.
Kelly, T., & Weaver, R. (2004). The Goal Structuring
Notation – A Safety Argument Notation. Elements.
http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.
1.1.66.5597&rep=rep1&type=pdf.
Kelly, T. P., McDermid, J., & Weaver, R. (2005). “Goal-
Based Safety Standards: Opportunities and Challenges”,
Proceedings of the 23rd International System Safety
Conf., San Diego, California (August 2005). https:/
/www-users.cs.york.ac.uk/~tpk/ISSC23.pdf.
Leveson, N. (2011). The Use of Safety Cases in
Certification and Regulation. MIT-ESD Working Paper
Series November 2011, 1–12. https://dspace
.mit.edu/bitstream/handle/1721.1/102833/esd-wp-2011
-13.pdf?sequence=1&isAllowed=y.
Macher, G., Messnarz, R., Armengaud, E., Riel, A.,
Brenner, E., & Kreiner, C. (2017). Integrated Safety and
Security Development in the Automotive Domain. SAE
Technical Papers, March 2017. https://doi.org/10.
4271/2017-01-1661.
Ruddle, A.R., et al., (2020). Requirements and timescales
for CYB-R: the UK Centre of excellence for road
transport cybersecurity resilience, ResiCAV Project
Deliverable 1, 30th March 2020. https://zenzic.io/
reports-and-resources/
Ruddle, A.R., & Ward, D.D. (2016). “Cyber Security Risk
Analysis for Intelligent Transport Systems and In-
vehicle Networks”, in A. Perallos, U. Hernandez-Jayo,
E. Onieva and I. Garcia (Eds.) Intelligent Transport
Systems: Technologies and Applications, Chapter 5,
Wiley-Blackwell, 2016, pp. 83–106. https://doi.org/
10.1002/9781118894774.ch5.
Shavit, M., Gryc, A., & Miucic, R. (2007). Firmware update
over the Air (FOTA) for automotive industry. SAE
Technical Papers, 724. https://doi.org/10.4271/2007-
01-3523.
Steger, M., Dorri, A., Kanhere, S. S., Römer, K., Jurdak, R.,
& Karner, M. (2018). Secure Wireless Automotive
Software Updates Using Blockchains: A Proof of
Concept. 137–149. https://doi.org/10.1007/978-3-319-
66972-4_12.
Tanguy, L., Tulechki, N., Urieli, A., Hermann, E., &
Raynal, C. (2016). Natural language processing for
aviation safety reports: From classification to
interactive analysis. Computers in Industry, 78, 80–95.
https://doi.org/10.1016/j.compind.2015.09.005.
Toulmin, S. (1958). The Uses of Argument Cambridge
University Press. doi:10.1017/CBO9780511840005.
Wang, P., Di, B., Zhang, H., Bian, K., & Song, L. (2018).
Cellular V2X Communications in Unlicensed
Spectrum: Harmonious Coexistence with VANET in
5G Systems. IEEE Transactions on Wireless
Communications, 17(8), 5212–5224. https://doi.org/
10.1109/TWC.2018.2839183.
Ward, D., Ibarra, I., & Ruddle, A. (2013). Threat Analysis
and Risk Assessment in Automotive Cyber Security.
SAE International Journal of Passenger Cars -
Electronic and Electrical Systems, 6(2), 507–513.
https://doi.org/10.4271/2013-01-1415.
Requirements for a Cybersecurity Case Approach for the Assurance of Future Connected and Automated Vehicles
633
