
Limitations of Local-minima Gaze Prediction
Peter A. C. Varley
a
, Stefania Cristina
b
, Kenneth P. Camilleri
c
and Alexandra Bonnici
d
Department of Systems and Control Engineering, University of Malta, Msida MSD 2080, Malta
Keywords:
Gaze Prediction, Eye Tracking, Feature Location.
Abstract:
We describe a minimal gaze prediction system which is straightforward to implement, can run on everyday
hardware, and does not require high-quality video images. We determine head pose and eye gaze from four
facial landmarks (nose tip, nose bridge, and eye pupils) which can be expressed as local minima of simple
pixel-intensity operations. We assess its stability to: variation of subject’s anatomy; facial landmark outliers;
and facial landmark small systematic errors.
1 INTRODUCTION
In this paper, we describe a minimal gaze prediction
system which is straightforward to implement, can
run on everyday hardware, and does not require high-
quality video images. We determine head pose and
eye gaze from four facial landmarks (nose tip, nose
bridge, and eye pupils) which can be expressed as lo-
cal minima of simple pixel-intensity operations. We
assess its stability to: variation of subject’s anatomy;
facial landmark outliers; and facial landmark small
systematic errors.
Our interest is in providing tools for design meet-
ings where designers meet to discuss their ideas, and
for client-facing meetings where such designs are dis-
played to customers. We wish to use gaze to commu-
nicate the focus of attention to all participants.
However, many aspects of the current pandemic
are unpredictable: not just its duration, but its long-
term sociological and cultural effects. We can be
fairly sure that indoor meetings will be less fre-
quent, and that when they do take place, the partic-
ipants will be masked, making gaze-tracking diffi-
cult. Outdoor settings are safer and more acceptable,
the already-observed shift towards walking meetings
(Damen et al., 2020) will surely continue, and partici-
pants in such meetings may well have their hands full
and welcome a hands-free input interface.
We can foresee that social distancing will nor-
malise the idea of seeking information from machines
a
https://orcid.org/0000-0003-4181-9234
b
https://orcid.org/0000-0003-4617-7998
c
https://orcid.org/0000-0003-0436-6408
d
https://orcid.org/0000-0002-6580-3424
rather than humans, but those seeking information
will be wary of touch-screen input interfaces and
would prefer something which can be operated from
a safe distance, such as the interactive display sug-
gested by (Zhang, 2016).
We can even envisage that, with people spending
more time at home, home automation controlled via a
wall-mounted screen will become more popular. Con-
trolling this interface by gaze from the other side of
the room has its appeal (Tofel, 2020).
Thus, without tying ourselves down to any spe-
cific application, we can see various possibilities for
a flexible, portable system comprising a projector, a
wall-mounted screen, a camera, and a portable com-
puter. The software should be modular—specific
applications will have specific requirements, so up-
grading any particular software component must be
straightforward.
Such a prototype would enable us to determine
which potential applications are realistic, and which
specific components would require upgrading for
these applications to become a reality.
Typical display screens are around 200 × 160cm
to 240 × 180cm—in this investigation, we assume
240 × 180cm. A 3 × 3 grid of virtual buttons will be
sufficient for simple control applications.
Section 2 describes previous work in gaze recog-
nition in general, and more specifically in locating eye
and nose features. Section 3 explains and describes
our own system. Section 4 gives snapshots of our re-
sults. Section 5 discusses system stability. Section
6 presents our conclusions and recommendations for
future work.
46
Varley, P., Cristina, S., Camilleri, K. and Bonnici, A.
Limitations of Local-minima Gaze Prediction.
DOI: 10.5220/0010477400460057
In Proceedings of the International Conference on Image Processing and Vision Engineering (IMPROVE 2021), pages 46-57
ISBN: 978-989-758-511-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 PREVIOUS WORK
In reviewing previous work, we are interested both
in methods and in applications. Choice of a mini-
mal subset of facial landmarks is important, and, as
we shall see, methods for locating eyes and noses are
of particular interest. Section 2.1 considers applica-
tions. Section 2.2 gives an overview of previous work
in gaze prediction. Section 2.3 discusses choice of
landmarks. Section 2.4 discusses previous work in lo-
cating eyes and pupils. Section 2.5 discusses previous
work in locating nose landmarks.
2.1 Applications
Toolkits for tracking the gaze of the user of a per-
sonal computer are now available commercially—
GazeRecorder (GazeRecorder, 2020) is one such—
so this must be considered a mature technology. It
is nevertheless worth noting that it is strongly range-
dependent—GazeRecorder applications are satisfac-
tory when the user is 70–80cm from the camera, but
the performance deteriorates rapidly with increasing
distance.
Multi-user gaze-tracking applications, and gaze
tracking at a distance (anything over 1m), are much
rarer.
Zhang (Zhang, 2016) considers various public-
facing applications, either outdoors or in shopping
malls, based on the concept of an interactive display
which is intuitive to use and requires no instruction.
For person-independent eye tracking for public
display applications, the accuracy is about one third
of the screen size. Rather than attempt a numer-
ical gaze prediction, the system classifies gazes as
left/centre/right, with N consecutive identical pre-
dictions constituting a command to which the sys-
tem will respond (there is a suggestion that N=6 was
used). This is sufficient for an application which al-
lows the user to choose one of three side-by-side op-
tions. It was noted that several users wore glasses and
used the system without problems, but varying height
was a problem as tall users tended to stoop to use the
system, while shorter users lifted their heels.
The suggested application is an album cover
browser where the user cycles through clockwise or
anticlockwise until the desired album shows up (al-
though we note that, even if the intention is to adver-
tise the products of one label, a typical label will have
between 1,000 and 10,000 albums on the market, and
cycling through all of them is impractical).
A more realistic suggestion is an events calendar
for the coming month—users should be able to de-
duce which way to scroll, and there will not be so
many events that they get bored before reaching the
one they want.
Sidenmark (Sidenmark et al., 2020) attempt to
distinguish natural head movements from intentional
head pose changes. Although initial results suggest
that this is possible in principle, this remains work in
progress.
Mardenbegi (Mardanbegi et al., 2019) addresses a
fundamental problem in multi-person gaze-tracking:
who is looking at the screen and who is not? Unfor-
tunately, this work includes what to us is a horrible
example of a bad interface paradigm: they use shak-
ing the head to signify select. While head gestures
is culture-dependent, in most cultures with which we
are familiar, nodding signifies acceptance and shaking
the head signifies rejection.
2.2 Gaze Tracking (General)
When discussing how of images of faces may be pro-
cessed, the distinction is often made between model
based and appearance based methods. It is not clear
that this distinction is justifiable, let alone helpful, as
there is a large overlap.
Model based methods assume that what is being
processed is a face, and that faces have certain known
properties. Some model based methods hypothesise
things which cannot be seen, such as the centre of
the eyeball. But methods which only use landmarks
which can be seen (eyes, nose, mouth) and label them
as component parts of a face are also model based.
Appearance based methods use only that which
can be seen. A few (but not many) appearance based
methods make no assumptions at all about the face
image, but just feed it straight into an AI machine
(usually MTCNN). Most appearance based methods
compile feature vectors which they then feed into an
AI machine (often MTCNN, but Webgazer (Papout-
saki et al., 2016) used SVM).
There are also methods (Ishikawa et al., 2004)
(Weidenbacher et al., 2006) (Sapienza and Camilleri,
2014) which are model based in that they label the
features they find as eyes, nose, mouth, but also ap-
pearance based in that they work entirely with what
can be seen.
Instead of dividing ideas into camps, it is more
helpful to look at individual methods, see how well
they work, and assess their advantages and disadvan-
tages.
For work prior to 2016, we commend Open-
Face (Baltrusaitis et al., 2016), an open-source toolkit
which implements those gaze tracking ideas current
at the time, including MTCNN, HOG/SVM and Haar
Cascades.
Limitations of Local-minima Gaze Prediction
47

As a representative example of the current state of
the art, we can consider Zhang (Zhang, 2016), which
describes a complete gaze-tracking system, from sys-
tem components, through implementation and inte-
gration, to applications, testing and user assessment.
It also includes a good general overview of the state
of the art at the time.
Zhang’s approach was to use a neural network,
to which the input was an annotated image accom-
panied by a selection of features. This raises ques-
tions: surely the strength of neutral networks is that
they can detect which patterns are important; if we al-
ready know what is important in an image, why use a
neural network at all?
More recent developments include:
Zhang (Zhang et al., 2019) presents OpenGaze.
an open-source toolkit for appearance-based gaze es-
timation and interaction. OpenGaze is largely a front-
end for OpenFace (Baltrusaitis et al., 2016).
Hagihara (Hagihara et al., 2018) creates a map-
ping between objects in the real world and objects the
user looks at. To this end, they present a 3D gaze
tracker which tracks depth as well as x-y coordinates.
Their implementation requires the user to wear a hel-
met or eye-tracker.
Mardenbegi (Mardanbegi et al., 2019) use
vestibulo-ocular reflex to determine how far away the
face is from whatever the user is looking at. But mea-
surements are made using a virtual reality headset,
and require accuracies which cannot be achieved us-
ing a typical laptop camera.
Although almost all recent systems have been
built around neural networks, it appears that diminish-
ing returns are setting in, with each new development
being based on a more subtle aspect of the human eye,
resulting in a smaller incremental improvement on its
predecessor.
While black-box methods such as neural networks
have their advantages, they are uninformative. In
practice, mere success is insufficient—we want some-
thing which works for reasons which we understand,
in order that, when it doesn’t work, we understand
why and can fix (or work around) the problem. Fur-
thermore, even accepting that predictions from neural
networks will be somewhat more reliable than those
from simpler methods (since the neural network takes
much more information into account when making its
prediction), this does not necessarily mean that a neu-
ral network system will be more reliable. Prediction
is one component of the overall system, a simpler but
faster component can make far more predictions in
the same time, and statistical analysis of many predic-
tions could well lead to better results than dependence
on one somewhat better prediction. Only experimen-
tal results can determine which gives better results.
For an alternative approach, we must go back
to (Kazemi and Sullivan, 2014), which implements
(Doll
´
ar et al., 2010)’s Cascaded Pose Regression and
(Cao et al., 2012)’s Ferns. This approach has proved
popular with hobbyists, and has been implemented
by (Xu et al., 2015) and (Papoutsaki et al., 2016)
amongst others. The key ideas here are (a) that in-
cremental improvement can turn a good estimate into
a better one and (b) that “anywhere in the image” is
a sufficiently good starting point. While we agree
wholeheartedly with (a), we cannot agree with (b)—
what appears in the background in any image is be-
yond our control, and we cannot predict how it may
disrupt iterative improvement.
2.3 Choice of Landmarks
How many facial landmarks are required?
The Dlib implementation (King, 2009) of
(Kazemi and Sullivan, 2014) locates and tracks 68 fa-
cial landmarks, but this is surely excessive. As an
alternative, Dlib provides an option for detecting just
5 landmarks: four eye points (inside and outside cor-
ners of the left and right eyes) and one nose point (the
base of the nasal septum).
FastHpe (Sapienza and Camilleri, 2014) locates
four facial features: left and right eyes, nose, and
mouth. The precise landmarks are not specified—
features are used to detect motion by comparing one
frame to the next, not to determine head pose.
Clearly, if we are to perform 3D calculations, we
require at least four landmarks, which must not lie
in the same plane (all five of the Dlib landmarks are
coplanar), and which must be in the rigid part of the
face (and not on the mouth, which can move indepen-
dently).
2.4 Eyes
Two methods for obtaining eye regions stand out:
Haar Cascades (Viola and Jones, 2004), and Cascaded
Pose Regression (Doll
´
ar et al., 2010) and its deriva-
tives. If we prefer the former, it is because there
are several good and readily-available Haar cascades
for eyes, notably Yu’s left- and right-eye cascades
(OpenCV, 2015). Asteriadis (Asteriadis et al., 2006)
has observed that the lower 60% of the regions re-
turned by Yu’s cascades are centred on the pupil.
FastHpe (Sapienza and Camilleri, 2014) uses Haar
Cascades. Applications based on the 68-point version
of Dlib (King, 2009) use Cascaded Pose Regression.
Both detect eyes but not pupils.
IMPROVE 2021 - International Conference on Image Processing and Vision Engineering
48

(Timm and Barth, 2011) use Haar Cascades to de-
termine an initial region of interest, and follow this
with a gradient-following method to determine pupil
positions: the pupil is the point at which most gradi-
ent vectors cross.
Recent ideas which are worthy of investigation in-
clude:
Liu (Liu et al., 2017) introduced a geometric re-
formulation which maintains the relationship between
left and right eyes when head pose changes.
Zhang (Zhang, 2016) introduced Pupil-Canthri-
Ratio, which could usefully be included in any ap-
proach which compiles localised features.
Cheng (Cheng et al., 2020) identifies the user’s
dominant eye, and uses that rather than the other one
(or a combination of the two) for gaze-tracking. Their
results are often (but not always) better than those of
previous methods developed by the same authors.
2.5 Noses
Compared with eyes, noses have received compara-
tively little attention. One might think that, as noses
are a consistent and readily-identifiable shape, they
would be an ideal application for Haar cascades, but
the reality is otherwise—the only readily-available
Haar nose cascade, that of (Castrill
´
on et al., 2007),
is far from reliable, as it is not clear which nose land-
mark it detects. Nevertheless, FastHpe (Sapienza and
Camilleri, 2014) uses this cascade.
The 68-point version of Dlib (King, 2009), imple-
menting the ideas of (Kazemi and Sullivan, 2014), lo-
cates nine nose points: four in a line from the bridge
to the tip, and a further five in an arc covering the nos-
trils. It can be noted that this method is less successful
in practice for noses than for other facial landmarks:
it is slower to converge, and the results are less accu-
rate. It is also hard-coded, so impossible to modify.
The more recent 5-point version of Dlib locates
just one nose point, the base of the nasal septum.
It is for these reason that we prefer simple ideas
such as that of Varley (Varley et al., 2021). This max-
imises a pixel-intensity-difference operation 2M −
L − N between three squares: M is centred on the
nose tip, and L and N are below and either side of it—
nose tips protrude from the face and catch the light,
whereas nostrils are concave and dark, as can be seen
in Figure 1. Understanding how it works means that
we are aware of its limitations: although this method
is quite good at finding nose tips, it is even better at
finding ear lobes, so it must be constrained to a region
of interest which includes the centre of the face and
excludes the ears.
Figure 1: Averaged Nose Tips and Surrounding Regions.
3 IMPLEMENTATION
There are four points on the human face which are
mathematically unique: the two pupils, the nose
bridge, and the nose tip. The important implication
of mathematical uniqueness is that, given a reason-
able estimate of where the feature probably is, we can
then use optimisation methods to determine a more
accurate position.
We make use of these four points as follows:
1. Locate faces in the image. See Section 3.1.
2. Locate the mouth region in each face. See Section
3.2.
3. Locate the eye regions in each face. See Section
3.3.
4. Find the pupils for each eye. See Section 3.4.
5. Find the nose tip. See Section 3.5.
6. Find the nose bridge. See Section 3.6.
7. Calculate the head pose: tilt angle, nod and turn,
and eye gaze. See Section 3.7.
8. Predict the gaze target. See Section 3.8.
3.1 Faces
We start our analysis by locating faces in an image.
Starting with an RGB image, we take the red channel,
which leads to slightly better results than the more
usual greyscale. We use Lienhart’s Alt2 Frontal Face
detector (Lienhart and Maydt, 2002), which in prac-
tice we have found to be most reliable, to find the face
regions. If several regions are found and they do not
Limitations of Local-minima Gaze Prediction
49

overlap, we process the best of them (regions with two
eyes are better than regions with one eye, which are
better than regions with no eyes). The face region is
used to constrain mouth, eye and nose regions of in-
terest.
3.2 Mouths
We locate a mouth region in each face. As a non-
rigid feature, the mouth itself is inappropriate for use
in gaze prediction, so these mouth regions are used
solely to constrain eye and nose regions of interest, for
which mouth regions provide a suitable lower bound.
We use Deniz’s Smile detector (OpenCV, 2015)
and Castrill
´
on’s Mouth detector (Castrill
´
on et al.,
2007) to find the mouth region. Although neither of
these is entirely reliable, by running both and com-
paring the results we can usually determine a reliable
mouth region.
3.3 Eye Regions
We use Yu’s Left Eye and Right Eye detectors
(OpenCV, 2015) to find eye regions, and where pos-
sible we follow Asteriadis’s (Asteriadis et al., 2006)
recommendation of using the lower 60% of this re-
gion.
Ideally, Yu’s cascades will find one left and one
right eye. Sometimes they do not, but by applying
common sense rules for selecting/estimating missing
regions we can usually get a useable result anyway.
These rules are:
• If the same detector (left or right eye) detects two
eye regions which overlap, merge them
• If a detected left eye overlaps with a detected right
eye, remove the one which is on the wrong side of
the face
• If there is one left eye and more than one right eye
(or vice versa), pick the one nearest the reflection
across the face of the unique eye and discard the
others
• If there is only one eye, estimate the other one by
reflection across the face.
The eye regions are not used directly in calculat-
ing gazes, but are one of the best predictors of pupil
position, as described next.
3.4 Pupils
The centre of each eye pupil is at the centre of a re-
gion with approximate rotational symmetry in which
pixel intensity increases with distance from the cen-
tre: pupils are darker than irises, and irises are darker
Figure 2: Averaged Nose Bridges and Surrounding Re-
gions.
than sclerae. (Occasionally, specular reflection may
interfere with this general rule.)
There are two fairly-reliable methods for locating
pupils.
When Yu’s cascades find one unambiguous left or
right eye (in about 86% of faces), the best estimate of
pupil position is the centre of the lower 60% (Asteri-
adis et al., 2006) of the cascade region.
Alternatively, given a region of interest, the pupil
is at the centre of the darkest 5×5 patch in this region.
The reliability is around 64%.
By cascading these methods, we can find pupil lo-
cations with an accuracy of ±1 pixel and a reliability
of around 95%.
3.5 Nose Tips
We use the method described in (Varley et al., 2021).
As can be seen in Figure 1, in a typical face, the
nose tip is the furthest point on the face from the face
plane and catches the light best, and the nostrils are
always below and either side of the nose tip and are
darker than their surroundings. Even when tightly
constrained, the method sometimes finds other nose
landmarks rather than tips; when it finds the correct
landmark (in about 86% of cases), median accuracy
is ±1 pixel.
3.6 Nose Bridges
By virtue of its central position, the nose bridge is the
reference point from which all gaze predictions start,
as well as contributing to the calculation.
The nose bridge is at the centre of a saddle point,
with eye regions to either side, and skin above and be-
IMPROVE 2021 - International Conference on Image Processing and Vision Engineering
50
low. As can be seen in Figure 2, eye regions are typ-
ically occluded by foreheads, noses and cheeks, and
are thus dark, while the skin of the forehead and nose
is in front of that of the bridge and thus bright.
To locate nose bridges, we use a method concep-
tually similar to the nose tip method above. We max-
imise the image intensity differences of four rectan-
gles, (V +W ) − (M + N), where V and W are above
and below, and M and N are either side of the nose
bridge.
As there are potentially several saddle points in
a face image, this method must also be constrained
to an appropriate region of interest—in practice, an
initial estimate that it is somewhere between the eyes
is good enough. The method reliably finds the correct
landmark, but median accuracy is only ±2 pixels.
3.7 Gazes
We require a system of equations for determining
gaze predictions. How many measurable values are
there, and how many unknowns?
By locating the landmarks described above, we
obtain eight measurable values: the x- and y-
coordinates of the four local-minima landmarks. L
and R are the left and right pupil coordinates, and V
and H are the nose tip and bridge coordinates.
The head is located somewhere in xyz space,
where x and y are horizontal and vertical coordinates
in the image, and z is distance from the camera.
We model the three human head movements (nod-
ding, shaking, tilting) as (pitch, yaw, roll) of a “disem-
bodied head” (Murphy-Chutorian and Trivedi, 2009)
which rotates about a centre point between the eyes
and behind the nose bridge. This centre of rotation is
located at (X,Y,Z) in xyz space. X and Y have to be
determined, but in this analysis we assume that Z can
be estimated from anatomical parameters such as the
inter-eye distance.
We model the two human eye movements (glanc-
ing aside, glancing upwards) as horizontal and verti-
cal translations (in principle, they are pitch and yaw
about the centre of the eyeball, but there is little to be
gained by modelling this added complexity).
For the purposes of simple analysis, with respect
to this centre of rotation, when the head is facing for-
ward (pitch, yaw and roll all 0):
• the left pupil is at (+E,0, 0),
• the right pupil is at (−E,0, 0),
• the nose bridge is at (0,0,−B),
• the nose tip starts at (0,+D,−C).
This gives us four anatomical parameters:
• E: inter-eye distance,
• B: protrusion of the nose bridge from the face
plane,
• C: protrusion of the nose tip from the face plane,
• D: vertical distance from the nose bridge to the
nose tip.
Heads have five angular degrees of freedom:
• N is nodding (pitch), which rotates the head in the
yz plane, leaving x unchanged,
• S is shaking (yaw), which rotates the head in the
xz plane, leaving y unchanged,
• T is tilting (roll), which rotates the head in the xy
plane, leaving z unchanged,
• P is glancing aside, which in principle rotates the
pupils in the xz plane, leaving y unchanged; we
treat it as a translation along the x-axis,
• U is glancing upwards, which in principle rotates
the pupils in the yz plane, leaving x unchanged;
we treat it as a translation along the y-axis.
Table 1: Notation.
Notation type meaning
L point left pupil coordinates
R point right pupil coordinates
V point nose tip coordinates
H point nose bridge coordinates
E length inter-eye distance
B length nose bridge protrusion
C length nose tip protrusion
D length nose height (tip to bridge)
N angle nod (pitch)
S angle shake (yaw)
T angle tilt (roll)
P (angle) glancing aside
U (angle) glancing upwards
X scalar centre of rotation x
Y scalar centre of rotation y
This leaves us with eight equations in eleven un-
knowns (see Table 1 for a full list of data points and
unknowns, and Figure 3 for an illustration). In order
to make the problem tractable, we must remove three
unknowns, and we choose to do this by estimating
other anatomical parameters B,C,D as a fixed propor-
tion of inter-eye distance E. As will be seen in Section
5.1, this can lead to problems when the subjects have
particularly small or large noses.
For simplicity, terms of the form sin(α)sin(β)
have been removed as in most cases angles are small.
V.x = X −C sin(S)cos(N) − D cos(S) sin(T ) (1)
Limitations of Local-minima Gaze Prediction
51

Figure 3: Notation: Points, Distances and Angles.
V.y = Y + D cos(N) cos(T ) −C sin(N) (2)
H.x = X −Bsin(S)cos(N) (3)
H.y = Y − B sin(N) (4)
L.x = X +(P + E/2)cos(S)cos(T )
+U cos(S)sin(T )
(5)
L.y = Y + (P + E/2) cos(N) sin(T )
−U cos(N) cos(T )
(6)
R.x = X +(P − E/2)cos(S)cos(T )
+U cos(S)sin(T )
(7)
R.y = Y + (P − E/2)cos(N)sin(T )
−U cos(N) cos(T )
(8)
Solving this system analytically might be possi-
ble, but we prefer a simpler approach. We rearrange
the equations into pairs:
L.x − R.x = E cos(S)cos(T ) (9)
L.y − R.y = E cos(N) sin(T ) (10)
L.x + R.x = 2X + 2P cos(S)cos(T )
+ 2U cos(S)sin(T )
(11)
L.y + R.y = 2Y + 2P cos(N) sin(T )
− 2U cos(N)cos(T )
(12)
V.x − H.x =(B −C)sin(S) cos(N)
− D cos(S)sin(T )
(13)
V.y − H.y = D cos(N)cos(T ) − (C − B) sin(N) (14)
V.x + H.x =2X − D cos(S)sin(T )
− (B +C)sin(S) cos(N)
(15)
V.y + H.y = 2Y + D cos(N)cos(T )
− (B +C)sin(N)
(16)
This can be solved iteratively (set all cosines to 1
and U to 0 in the first iteration):
E = magnitude(L − R)/(cos(S)cos(T )) (17)
sin(T ) = (L.y − R.y)/(E cos(N)) (18)
sin(N) =(V.y − H.y − D cos(N) cos(T ))
/(B −C))
(19)
sin(S) = ((V.x − H.x) + D cos(S)sin(T ))
/((B −C)cos(N)))
(20)
X = (V.x + H.x + (B +C)sin(S)cos(N)
+ D cos(S)sin(T ))/2
(21)
Y = (V.y + H.y + (B +C)sin(N)
− D cos(N)cos(T ))/2
(22)
P = ((L.x + R.x)/2 − X −U cos(S) sin(T ))
/(cos(S)cos(T ))
(23)
U = (Y − (L.y + R.y)/2 + P cos(N)sin(T )))
/(cos(N) cos(T ))
(24)
We have found that, if implemented as-is, this se-
quence takes some time to converge as it oscillates.
However, by smoothing calculation of E (Equation
17) so that E = (E
1
+E
0
)/2 for previous value E
0
and
new value E
1
, it converges very quickly. We use 10
iterations, but 4 should be sufficient for stable predic-
tions.
IMPROVE 2021 - International Conference on Image Processing and Vision Engineering
52
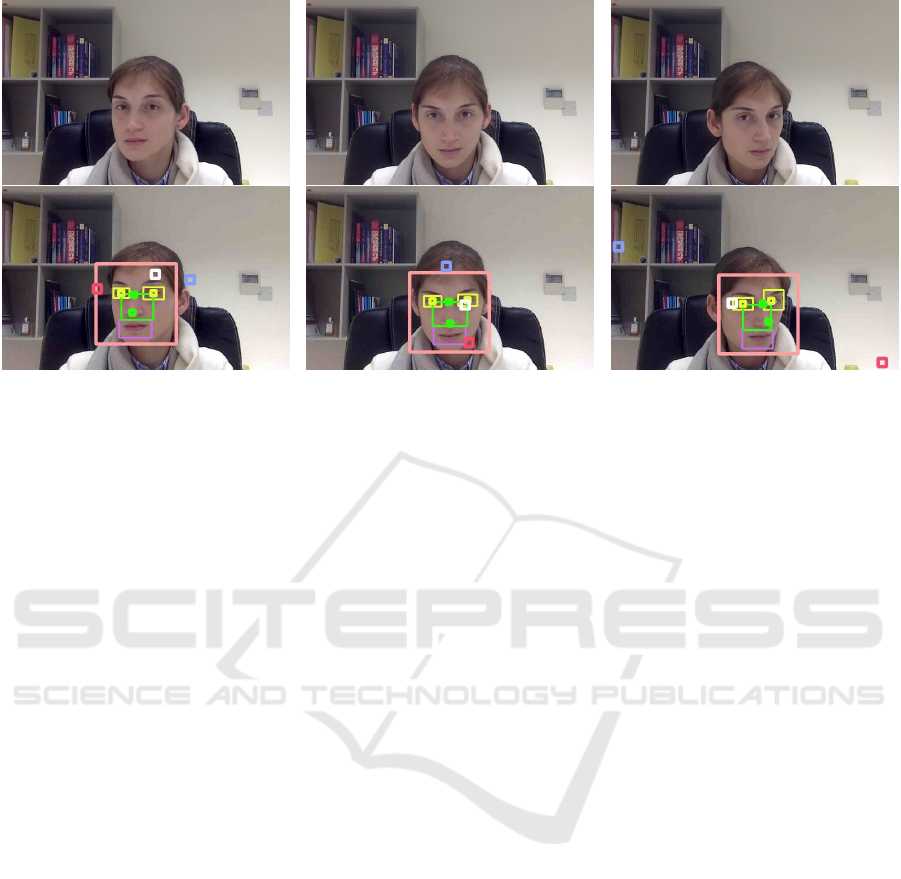
Figure 4: Original and Processed Images: Looking Right, Down, Left.
3.8 Gaze Target
The overall gaze prediction is a vector, the sum of
the head pose and eye gaze, originating from the nose
bridge.
Geometrically, the head pose (S,N) and pupil dis-
placement (P,U ) are 2D projections of 3D vectors
originating from (X,Y ); we must multiply them by
the distance from the subject to the camera to find
the gaze target. We estimate this distance from E,
the inter-eye distance, as W /E where W is a tune-
able program parameter. A further complication is
that, anatomically, eye movements are more subtle
than head movements, so must be scaled up to obtain
the correct effect; scaling factor F is another tuneable
parameter. We thus calculate the gaze target G:
G = [X ,Y ] +W ([S,N] + F[P,U])) (25)
4 RESULTS
The images in the top row of Figure 4 were extracted
from a short test video in which the subject’s intention
was to keep her gaze steady while moving her head,
and processed as described in Section 3. The results
are as shown in the second row of Figures 4. Images
and results have been cropped to remove irrelevant
background.
In the results images:
• The pink square shows the face rectangle as found
by the face Haar cascade
• The purple rectangle shows the mouth rectangle
as determined by the Haar cascades
• The yellow rectangles show the left and right eye
rectangles as found by the two eye Haar cascades
• The yellow dots show the predicted positions of
the subject’s left and right pupils
• The green rectangle shows the region of interest
which constrains the search for nose tips
• The green dots show the predicted positions of the
subject’s nose tip and nose bridge
• The red square marks the predicted head pose vec-
tor
• The blue square marks the predicted eye gaze vec-
tor
• The white square marks the overall gaze predic-
tion.
For example, in the top left image in Figure 4, the
subject has moved her head to the right, and is glanc-
ing to her left so as to keep the camera in view. Thus
the head pose prediction is to her right; the eye gaze
prediction is to her left; and the overall gaze predic-
tion is (relatively) central.
5 STABILITY
We consider three sources of instability which could
disrupt our gaze predictions: variations of anatomy;
outliers such as those caused by failure to detect land-
marks correctly; and small errors such as those im-
posed by the limitations of pixel resolution.
5.1 Anatomy
We noted in Section 3.7 that estimating anatomical
nose parameters as a fixed proportion of inter-eye dis-
Limitations of Local-minima Gaze Prediction
53
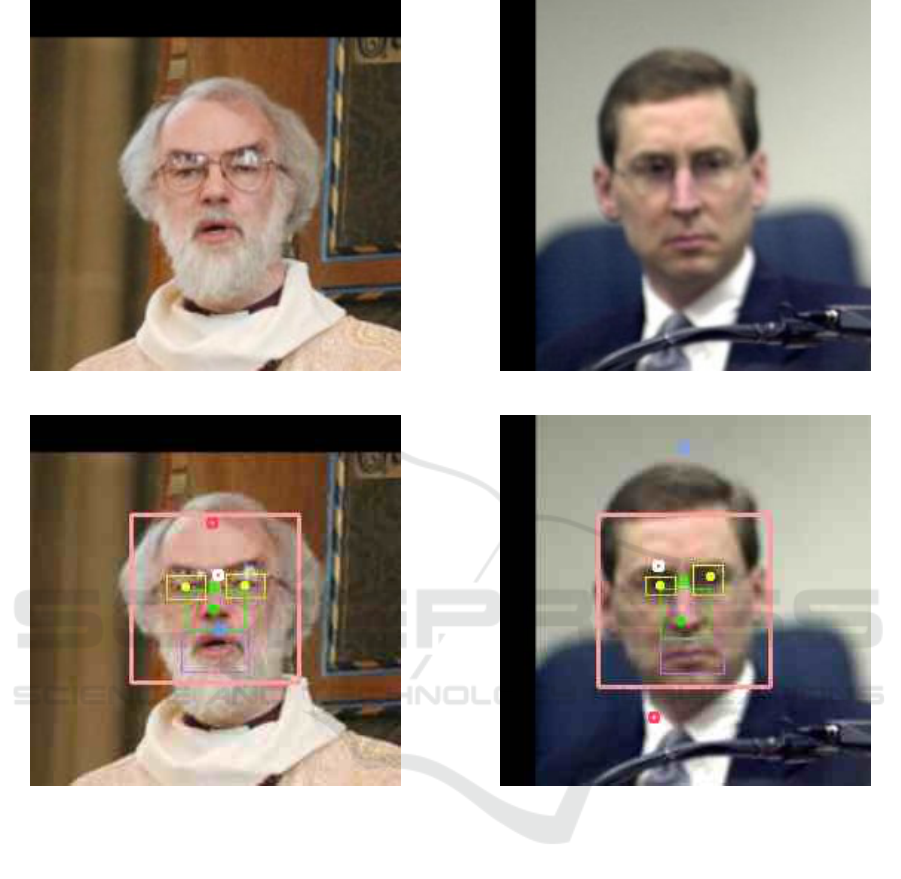
Figure 5: Image: A Short Nose (Huang et al., 2007).
Figure 6: Processed Image: Head Pose Too High.
tance could lead to problems when the subjects have
particularly short or long noses. This proves to be the
case in practice: short noses appear to be pointing up-
wards (as in Figures 5 and 6, where D/E = 0.352),
and long noses appear to be pointing downwards (as
in Figures 7 and 8, where D/E = 0.735). (Both im-
ages are taken from the LFW dataset (Huang et al.,
2007).)
This can be overcome by recalibration—the ra-
tios B/E, C/E and D/E are constant for any individ-
ual user—but recalibrating for each new user is time-
consuming and tedious.
It we want a system which works for everyone
straight out of the box, there is no easy solution. In
order to allow for the full variety of human noses,
we shall need more nose landmarks, and our system
and the equations which describe it will inevitably be-
come more complex.
Figure 7: Image: A Long Nose (Huang et al., 2007).
Figure 8: Processed Image: Head Pose Too Low.
5.2 Outliers
Although outliers can occur for any number of rea-
sons, the most common cause in frontal faces is the
nose tip finder described in Section 3.5, which in test-
ing found the wrong landmark in about 14% of im-
ages. For example, when processing Figure 9, it has
found the wing of the nose rather than the nose tip—
see Figure 10.
This result is typical: although an outlier in the
nose tip prediction has caused a large error in the
estimated head pose, the resulting error in eye gaze
prediction often almost compensates for this, and the
overall resulting error is surprisingly small.
When the head pose is to one side (in our imple-
mentation, beyond 28
◦
), the Haar cascades used for
finding pupils become unreliable for the more dis-
tant eye. Sometimes they fail altogether, and some-
IMPROVE 2021 - International Conference on Image Processing and Vision Engineering
54

Figure 9: Original Image: Looking Up.
Figure 10: Processed Image: Landmark Failure.
times they return ambiguous regions of interest which
can including hair or eyebrows, causing the secondary
method for locating pupils to fail too. (Timm and
Barth, 2011) have reported similar problems. In such
cases, the head pose prediction can be very poor.
5.3 Small Errors
When using a single camera, errors of ±1 pixel are
commonplace and, in practice, unavoidable. What ef-
fect do they have on gaze prediction?
The subject in Figure 11 (again taken from the
LFW dataset (Huang et al., 2007)) has a particularly
average nose, D/E = 0.568, very close to the median
ratio of nose length to inter-eye distance, so is a suit-
able subject for a sensitivity analysis. We estimate, by
comparison with other images, that this image corre-
sponds to a face around 123 cm from the camera.
We find by varying the labelled landmark posi-
tions that:
• a 1-pixel x error in the nose bridge position
changes the shake angle by 3.23
◦
,
• a 1-pixel y error in the nose bridge position
changes the nod angle by 3.35
◦
,
• a 1-pixel x error in the nose tip position changes
the shake angle by 3.27
◦
,
• a 1-pixel y error in the nose tip position changes
the nod angle by 3.35
◦
.
Figure 11: A Typical Nose (Huang et al., 2007).
These angles will increase with distance, as the
size of each landmark in the image decreases. Fur-
thermore, the absolute error on the screen for any
given angle error will also increase with distance.
How far from the camera can we go before the error
becomes unacceptable?
Table 2: Absolute Error Estimates vs Distance.
Distance (cm) x-error (cm) y-error (cm)
123 7 7
150 11 10
200 19 19
250 30 29
300 43 42
350 59 57
400 77 75
450 98 95
500 121 118
550 147 143
600 176 171
650 207 202
700 242 236
750 279 272
800 320 311
850 363 354
900 410 399
950 461 448
1000 515 500
Assuming that (a) distance has no other effect on
gaze prediction than reducing the size of the face, (b)
the angle error resulting from a 1-pixel error increases
in proportion to the distance, and (c) the resulting ab-
solute error from a given angle error is in proportion
to the distance, we obtain the figures in Table 2.
For example, at 250cm, an error of ±1 pixel can
Limitations of Local-minima Gaze Prediction
55

change the nod angle by 6.57
◦
and/or the shake angle
by 6.81
◦
, leading to a horizontal error of 30cm and/or
a vertical error of 29cm.
Thus, if the target is a 80 × 60 cm box on a 240 ×
180 cm screen on the wall of a 10 × 6m room, a 1-
pixel error from 300 cm will miss the box, a 1-pixel
error from 450–500 cm will miss the screen, and a
1-pixel error from 750–800 cm will miss the wall.
6 CONCLUSIONS
We have shown that a minimal gaze prediction sys-
tem using only four points can make reasonably reli-
able predictions for subjects with average noses who
sit within 2m of the camera. This system is easily im-
plemented, requiring only four or five Haar cascades
(all of which are bundled with OpenCV). It is easy to
modify, or even replace, any of the landmark locators.
This simplicity comes at some cost. There are
places where we could use more data points, most ob-
viously where we have to make assumptions about the
anatomical proportions of the face.
What can be done for people with small or large
noses? We could add calibration to retune the sys-
tem for each new user; the cost is ease of use. Alter-
natively, the methods for locating nose tips and nose
bridges are reasonably reliable, and we could in prin-
ciple use similar methods to identify other landmarks
on the nose, giving us extra equations; the cost is
added complexity.
We would also like to be able to weight our cal-
culations so that, when the head is turned, we give
priority to the nearer eye. This would be particularly
useful in those cases where the head is turned and the
location of the more distant eye has not been deter-
mined correctly. With only four points, there is no
redundancy, and no opportunity to give some points
higher weightings than others.
Although it may appear counter-intuitive, gross
outliers are not usually a serious problem. In a video-
processing system in which landmarks are tracked
from one frame to the next, outliers can be caught and
discarded.
The most serious problem is that of small errors
becoming large errors with increasing distance from
the camera, as this imposes a limit on the distance at
which gaze prediction can be useful.
On this basis, we can assess the potential appli-
cations listed in Section 1. Interactive display boards
used from a distance of between 1–2m should cer-
tainly be possible. Multi-user interactive boards may
be restricted in the number of users, as it will be dif-
ficult to place them so that they are less than 2.5m
from the board but more than 2m from one another.
Sadly, gaze-controlled smart homes may not yet be
realistic, as even if the screen is placed on the centre
of the longer wall of a 5 × 3m living room, there will
be locations in the room which are out of range.
At present, it seems that the best workaround is
to improve the hardware: either buy a more expen-
sive camera with higher resolution, or (better still) use
multiple cameras.
The natural progression is from still images to
video sequences. Before we make this leap, we must
ensure that our system is ready for it.
ACKNOWLEDGEMENTS
The authors wish to acknowledge the project: “Set-
ting up of transdisciplinary research and knowledge
exchange (TRAKE) complex at the University of
Malta (ERDF.01.124)”, which is co-financed by the
European Union through the European Regional De-
velopment Fund 2014–2020.
REFERENCES
Asteriadis, S., Nikolaidis, N., Hajdu, A., and Pitas, I.
(2006). An eye detection algorithm using pixel to edge
information. In ICCVW.
Baltrusaitis, T., Robinson, P., and Morency, L.-P. (2016).
Openface: An open source facial behavior analysis
toolkit. In 2016 IEEE Winter Conference on Applica-
tions of Computer Vision (WACV), Lake Placid, NY,
pages 1–10.
Cao, X., Wei, Y., Wen, F., and Sun, J. (2012). Face align-
ment by explicit shape regression. In CVPR, pages
2887–2894.
Castrill
´
on, M., D
´
eniz, O., Hern
´
andez, M., and Guerra, C.
(2007). Encara2: Real-time detection of multiple
faces at different resolutions in video streams. In Jour-
nal of Visual Communication and Image Representa-
tion Vol 18 No 2, pages 130–140.
Cheng, Y., Zhang, X., Lu, F., and Sato, Y. (2020). Gaze
estimation by exploring two-eye asymmetry. In IEEE
Transactions on Image Processing (TIP), 29(1), pages
5259–5272.
Damen, I., Lallemand, C., Brankaert, R., Brombacher, A.,
van Wesemae, P., and Vos, S. (2020). Understanding
walking meetings: Drivers and barriers. In ACM Pro-
ceedings of CHI 2020.
Doll
´
ar, P., Welinder, P., and Perona, P. (2010). Cascaded
pose regression. In CVPR, pages 1078–1085.
GazeRecorder (2020). Gazerecorder webcam eye tracking.
https://gazerecorder.com/.
Hagihara, K., Taniguchi, K., Abibouraguimane, I., Itoh,
Y., Higuchi, K., Otsuka, J., Sugimoto, M., and Sato,
IMPROVE 2021 - International Conference on Image Processing and Vision Engineering
56

Y. (2018). Object-wise 3d gaze mapping in physical
workspace. In Proc. Augmented Human 2018, pages
25:1–25:5.
Huang, G. B., Ramesh, M., Berg, T., and Learned-Miller,
E. (2007). Labeled faces in the wild: A database for
studying face recognition in unconstrained environ-
ments. Technical Report 07-49, University of Mas-
sachusetts, Amherst.
Ishikawa, T., Baker, S., Matthews, I., and Kanade, T.
(2004). Passive driver gaze tracking with active ap-
pearance models. In Proceedings of the 11th World
Congress on Intelligent Transportation Systems.
Kazemi, V. and Sullivan, J. (2014). One millisecond face
alignment with an ensemble of regression trees. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 1867–1874.
King, D. E. (2009). Dlib-ml: A machine learning toolkit.
In Journal of Machine Learning Research 10, pages
1755–1758.
Lienhart, R. and Maydt, J. (2002). An extended set of haar-
like features for rapid object detection. In Proceed-
ings. 2002 International Conference on Image Pro-
cessing volume 1, pages 900–903. IEEE.
Liu, Y., Lee, B.-S., and McKeown, M. (2017). A new re-
construction method in gaze estimation with natural
head movement. In Fifteenth IAPR International Con-
ference on Machine Vision Applications (MVA), May
2017.
Mardanbegi, D., Clarke, C., and Gellersen, H. (2019).
Monocular gaze depth estimation using the vestibulo-
ocular reflex. In Proceedings - ETRA 2019: 2019
ACM Symposium On Eye Tracking Research and Ap-
plications, page 20. ACM.
Murphy-Chutorian, E. and Trivedi, M. M. (2009). Head
pose estimation in computer vision: A survey. In IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence Volume 31 No 4.
OpenCV (2015). Open Source Computer Vision Library.
Papoutsaki, A., Sangkloy, P., Laskey, J., Daskalova, N.,
Huang, J., and Hays, J. (2016). Webgazer: Scalable
webcam eye tracking using user interactions. In Pro-
ceedings of the 25th International Joint Conference
on Artificial Intelligence (IJCAI), pages 3839–3845.
AAAI.
Sapienza, M. and Camilleri, K. P. (2014). Fasthpe: A recipe
for quick head pose estimation. Technical Report TR-
SCE-2014-01, University of Malta.
Sidenmark, L., Mardanbegi, D., Ramirez Gomez, A.,
Clarke, C., and Gellersen, H. (2020). Bimodalgaze:
Seamlessly refined pointing with gaze and filtered ges-
tural head movement. In ETRA ’20 Proceedings of the
12th ACM Symposium on Eye Tracking Research and
Applications. ACM, ACM.
Timm, F. and Barth, E. (2011). Accurate eye centre local-
isation by means of gradients. In Proceedings. 6th
International Conference on Computer Vision, Imag-
ing and Computer Graphics Theory and Applications,
pages 125–130.
Tofel, K. C. (2020). Eye-gaze tracking on a smart
display: The next smart home interface?
https://staceyoniot.com/eye-gaze-tracking-on-a-
smart-display-the-next-smart-home-interface/.
Varley, P. A., Cristina, S., Bonnici, A., and Camilleri, K. P.
(2021). As plain as the nose on your face? In Pro-
ceedings. 16th International Conference on Computer
Vision, Imaging and Computer Graphics Theory and
Applications.
Viola, P. and Jones, M. (2004). Robust real-time face de-
tection. In International Journal of Computer Vision,
57(2), pages 137–154.
Weidenbacher, U., Layher, G., Bayerl, P., and Neumann,
H. (2006). Detection of head pose and gaze direction
for human-computer interaction. In Perception and
Interactive Technologies. PIT.
Xu, P., Ehinger, K. A., Zhang, Y., Finkelstein, A., Kulkarni,
S. R., and Xiao, J. (2015). Turkergaze: Crowdsourc-
ing saliency with webcam based eye tracking. Tech-
nical Report 1504.06755, arXiv preprint.
Zhang, X., Sugano, Y., and Bulling, A. (2019). Evaluation
of appearance-based methods and implications for
gaze-based applications. In Proc. 37th ACM SIGCHI
Conference on Human Factors in Computing Systems
(CHI 2019).
Zhang, Y. (2016). Eye tracking and gaze interface design
for pervasive displays. PhD thesis, University of Lan-
caster.
Limitations of Local-minima Gaze Prediction
57
