
Smart Cities V2I Cloud based Infrastructure using Road Side Units
Tamer Omar
a
, Kevin Guerra, Christopher Mardoyan, Shannen Sharma and Xavier Rangel
Department of Electrical and Computer Engineering, California State Polytechnic University, Pomona, U.S.A.
Keywords:
Road Side Units (RSUs), K-means Clustering, Internet of Vehicles, Smart Cities, Vehicle to Infrastructure
(V2I).
Abstract:
Vehicles and city infrastructure can be interconnected through Road Side Units (RSUs) and On Board Units
(OBUs) that utilize Radio-frequency identification (RFID) technology to send and receive information about
various road conditions in real time. The objective of this work is to create and test a mesh network through
Internet of Things (IoT) devices to emulate and test the RSUs capabilities. A vehicle-to-infrastructure (V2I)
network is established through parent & child approach that rely on previously established infrastructure. The
purpose for this design is to extend the reach of the system while limiting the amount of endpoint nodes needed.
The mesh network is meant to target areas affected with road congestion. Using this information, the vehicles
and users will be aware of traffic conditions on their routes in real time. Connected vehicles will be able to
adjust their routes to experience more efficient commutes. The mesh network is capable of taking information
from vehicles and transmitting it through the network until being uploaded to the cloud. In particular, the
number of vehicles passing through an endpoint RSU within a certain time frame is collected and sent through
the network, along with the location of the endpoint RSU. The parent node receives this information through
a relay RSUs and uploads it to a cloud service where the data is collected and then analyzed through a data
mining software. The software applies the k-means clustering algorithm to classify the traffic conditions of
the road at a particular time. Results shows the capability of the algorithm to detect and classify the different
traffic conditons.
1 INTRODUCTION
Recently Internet of Vehicles (IoV) is considered one
of the most accelerating research araes. Investiga-
tion optimal communication and computing methods
for vehcle connectivity is deemed essentail to create
an IoV. Successful efforts is recognized in innovating
Autonomous Vehicles (AV) include using On Board
Units (OBUs) that can communicate wirelessly to as-
sist AVs staying in the correct lane or during self-
parking. To further innovation and efficiency, Road
Side Units (RSU) can be implemented to assist ve-
hicles by collecting data regarding various road con-
ditions, and then use this data to reroute vehicles to
alternative roads that decrease travel time. Addition-
ally, the data collected will provide useful information
for emergency services as they quickly respond to ac-
cidents and other hazards that appear on roads.
RSUs are designed to create more efficient routes
and a much safer environment for fully autonomous
vehicles on the road. The RSU communication hap-
a
https://orcid.org/0000-0001-5619-8747
pens in an ad-hoc network where the vehicles can
communicate among one another, but the data ex-
change can be expanded with the use of the roadside
units(Silva and Meira, 2016). In (Silva and Meira,
2015) the data is processed and translated into useful
information and recommendations to assist the users
of the transportation and transit authorities. The RSU
will be combined with the communications from Ve-
hicle Ad-hoc Network (VANETs) where the RSUs
disperse messages at designated locations along the
road network, and will expand on the types of in-
formation collected such as weather conditions, road
work, the time, fluctuations of traffic, and so forth,
which will lead to much more accurate coverage of
data, and expand coverage as referenced in (Albouq
and Fredericks, 2017; Lin and Rubin, 2017).
For this system to operate, the corresponding com-
ponents need to be able to collect, track, and distribute
information at high rates, and in large volumes. The
studies in (Ansari et al., 2013; Santos et al., 2016)
used a system consists of a microcontroller, GPS,
Digital Short-Range Communication (DSRC) mod-
ule, WIFI module, and several other components. The
270
Omar, T., Guerra, K., Mardoyan, C., Sharma, S. and Rangel, X.
Smart Cities V2I Cloud based Infrastructure using Road Side Units.
DOI: 10.5220/0010469402700277
In Proceedings of the 6th International Conference on Internet of Things, Big Data and Security (IoTBDS 2021), pages 270-277
ISBN: 978-989-758-504-3
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

system is (Ferre et al., 2013) is used for charging sta-
tions, the system being implemented is altered to meet
the demands of being on a road with live traffic. Ra-
dio frequency identification allows for transfer of spe-
cific data, and with the integration of sensors and mi-
crocontrollers along with the cloud provides the com-
munication protocols, and service applications for an
efficient network (Salahuddin et al., 2015).
While RSUs seem like a viable solution for most
issues regarding VANETs and autonomous vehicles,
they do come with their own sets concerns. As pre-
sented in (Ota et al., 2017), RSUs placement can
have a huge influence in how efficient their energy
consumption is as well as how many RSUs must be
placed per area. With cost in mind, RSUs must be
placed efficiently to obtain the best service for the
money being spent. Fixing the energy consumption
issue can be done in numerous ways, such as solar
power which can be used as the main power source
for the RSUs, as their placement will consist entirely
of outdoor settings (Khezrian et al., 2015). Addition-
ally, authors in (Mostofi et al., 2013) suggests a vi-
able solution for energy consumption by proposing a
ON/OFF sleep schedule for the RSUs wherein there
are designated times at which less-used RSUs will be
shut off. These RSU locations will be based on the
frequency at which roads are used at certain times.
As (Silva and Meira, 2015) mentions, a combina-
tion of stationary RSUs combined with mobile data
centers, which will be vehicles with on board units,
creates a network that has a wide coverage range and
the most diverse capabilities due to the variety of in-
formation that can be collected from the mobile units,
as well as the available information from the station-
ary RSUs. The stationary devices can be installed on
the side of the road or on a roadside pole and come
equipped with storage, processors, and network capa-
bilities that allow for the communication among vehi-
cles with the use of DSRC.
With the support of VANETs, autonomous vehi-
cles will be able to travel with uniform spacing be-
tween cars which will alleviate traffic jams and im-
prove fuel efficiency. One issue with pure VANET
systems is the amount of data that can be passed
through, which causes this communication to be lim-
ited. So, with the support of RSUs, the amount of
data being used can be increased which will provide
a more accurate and more robust infrastructure.
A wireless mesh network is a communications
network made up of nodes configured in a mesh topol-
ogy. The network topology is an arrangement of how
the system is communicating to one another. An ad-
hoc network is a form of a mesh network that con-
tains wireless nodes. These nodes can form a network
that does not rely on fixed network infrastructure.
Multiple studies discussed the differences between
VANETs, MANETs, and Intelligent Transportation
System (ITS) as sub-classes of an ad-hoc network.
All of these networks and systems combine the telem-
atics to the roads so that a system can maintain the
goals for achieving better roadways which will create
a safer road, environmental protection, efficiency, and
benefit the economy (Sharmila and Shanthi, 2016).
The mesh ad-hoc network is designed with three
types of nodes, each with a specific function. Gate-
ways are devices that can connect beyond the mesh
network and have access to the cloud. Repeaters are
devices that are capable of forwarding data between
endpoints in the mesh network. Endpoints are de-
vices that are not capable of sending messages for
other devices within the mesh network. These three
types of nodes create the mesh network that is capa-
ble of transmitting data of the road conditions to the
server via 5G (Lee, 2018; Kuo et al., 2013).
There are multiple types of ad-hoc networks that
can be used to create a mesh network – mainly Wi-
Fi direct, Bluetooth or ZigBee configurations. All
have strengths and faults. Wi-Fi direct has superior
range and data transmission rates. However, as ad-
hoc network information cannot inherently be shared
between two client systems and must instead only be
shared to a host, it also cannot perform any node-
hopping techniques to send information (Wibisono
and Bayhaki, 2015; Ashritha M and Sridhar C S,
2015).
Road conditions are constantly changing in dif-
ferent areas, which cause back-ups, sudden speed
changes, and other types of hindrances on the road.
The study in (kumar Gupta and Khara, 2015) calls for
a system that will obtain current location road condi-
tions, which is very specific for obtaining proper road
conditions. There are several techniques that can han-
dle the network connection for a multi-hop data ex-
change between Vehicle to Infrastructure (V2I) and
between Vehicle to Vehicle (V2V), which will build a
much more secure communication system. Road Side
Units are relay nodes that can connect the VANET
nodes with the rest of the network, and make the
RSUs a key component for applications that require
more than one application in the VANET.
This work aims at proposing a method for V2C
communication that rely on VANET. The RSUs in
the VANET will communicate information to one an-
other so the data can quickly transfer to each repeater,
which will then transmit the data to an endpoint. This
endpoint will upload data to a cloud from which in-
formation will be dispersed to vehicles on the road.
Using this method, the data collected will be read-
Smart Cities V2I Cloud based Infrastructure using Road Side Units
271

ily available for vehicles to receive miles away from
the origin destination. This will be possible through a
node-hopping method of information transfer, where
a node will use its neighboring nodes as relay points
to send the data to a specific node.
Using strategic placement, the RSU can be opti-
mized for ideal coverage with minimal RSU deploy-
ment, and cover cities as well as suburban areas. Ad-
hoc networks do not rely on previous infrastructure,
thus can decrease expenses required for RSUs to act
as a gateway. The gateways receives information from
various nodes and is the only component capable of
conveying data to the cloud. The repeater is capable
of only receiving and exporting data from other re-
peaters or a gateway, which will expand the range of
communications. With proper placement techniques,
data will be transferred from one RSU node to the
next, quickly providing seamless information to the
gateways in the mesh network.
Radio Frequency Identification (RFID) will be
used to collect high volumes of data from vehicles on
the road. The vehicles will have an OBU that con-
tains a RFID reader and RFID tag to transmit and re-
ceive data. The RSU will be equipped with the same
technologies to create a two-way data transfer system.
With this dual transfer setup, cars will receive up-to-
date information about the roads they travel on, and
RSUs can receive up-to-date information from vehi-
cles that have already passed. This method may also
be used to update vehicles with speed limit informa-
tion as well as other localization data or obstructions
that may be located within the proximity of the RSU.
The information on various road conditions col-
lected from this network will be sent to a parent unit
that is connected to a cloud with use of a 5G network.
The RSU that contains 5G capabilities is referenced
as a parent unit, and only parents are connected via
5G and have the capabilities of collecting data from,
and sending data to, the cloud server. The server will
be used to store the data it has collected, which will
then be distributed to the RSUs and transferred to the
vehicles on the road. The information can modify ve-
hicle routes and let the vehicles be aware of other any
hindering obstructions on their routes.
2 SYSTEM ARCHITECTURE
Vehicle to Cloud (V2C) connectivity requires differ-
ent forms of communication and this is where the ar-
chitecture of the cloud comes into play. It is impor-
tant to remember that when using for example a 5G
network to connect to the cloud, three different types
of communication among the vehicles and infrastruc-
ture can be created. These three types of communi-
cations are: vehicle-to-roadside unit (V2R), vehicle-
to-vehicle (V2V), and vehicle to infrastructure (V2I).
These components allow for edge and core cloud lay-
ers to be created, which means it can support data
collection and exchanging, fully mining and utiliza-
tion of collected data, and using various real-time
efficient and secure applications. Reliable and on-
demand vehicular data services and applications can
be implemented in the cloud. Furthermore, in these
cloud core and edge layers exists the permanent and
temporary cloud computaional resources. In the core
cloud there are temprory computing resources orga-
nized and made available to provide traffic managa-
ment and analysis as required. In the edge cloud,
storage and communication resources of vehicles and
road-side units are implemented to extend the core
cloud and provide capabilities of storage and cloud
computation.
Additionaly, there are security issues that do arise
with this 5G cloud connectivity and IoT devices. One
of the main issues is the security and privacy preser-
vation of collected data from the VANET. This mainly
has to do with the types of data and information that
are being passed and collected in the cloud. This is a
big worry for a lot of users when it comes to stor-
ing information into the cloud because information
breaching is very common. It is recommended to in-
corporate proper security solution with the proposed
vehicular to cloud platform to ensure security and pri-
vacy.
Vehicular cloud computing allow for higher vol-
umes of data to be transmitted and collected in the
cloud. With 5G become readily available, there will
be support for various connectivity and significantly
faster transmission with 5G communications. A V2C
platform will be enabled to provide more reasonable
and realistic services with the support of a 5G net-
work. A computational infrastructure must be con-
nected with a the vehicle grid that contains RSUs
where it serves the purpose for creating a more effi-
cient vehicle grid. Furthermore, the vehicle network
is referred to as VANET where vehicles have OBUs
installed and also roads are equipped with RSUs.
The V2C is capable of contributing in several dif-
ferent ways since it stores data of current road con-
ditions. The vehicles can be interconnected to the
cloud through the OBUs and the RSUs act as gate-
ways to send the data to the cloud. V2C will primar-
ily hold safety and also non-safety-related data that
will be transmitted to vehicles for increasing road effi-
ciency. There are three methods for disseminating this
information to vehicles, one through the VANET us-
ing V2C communication, or using Vehicle to Vehicle
IoTBDS 2021 - 6th International Conference on Internet of Things, Big Data and Security
272
(V2V) communicaion, or by communication between
RSUs . These methods are all supported for exchang-
ing data in a modern transportation system according
to the distances the systems can reach.
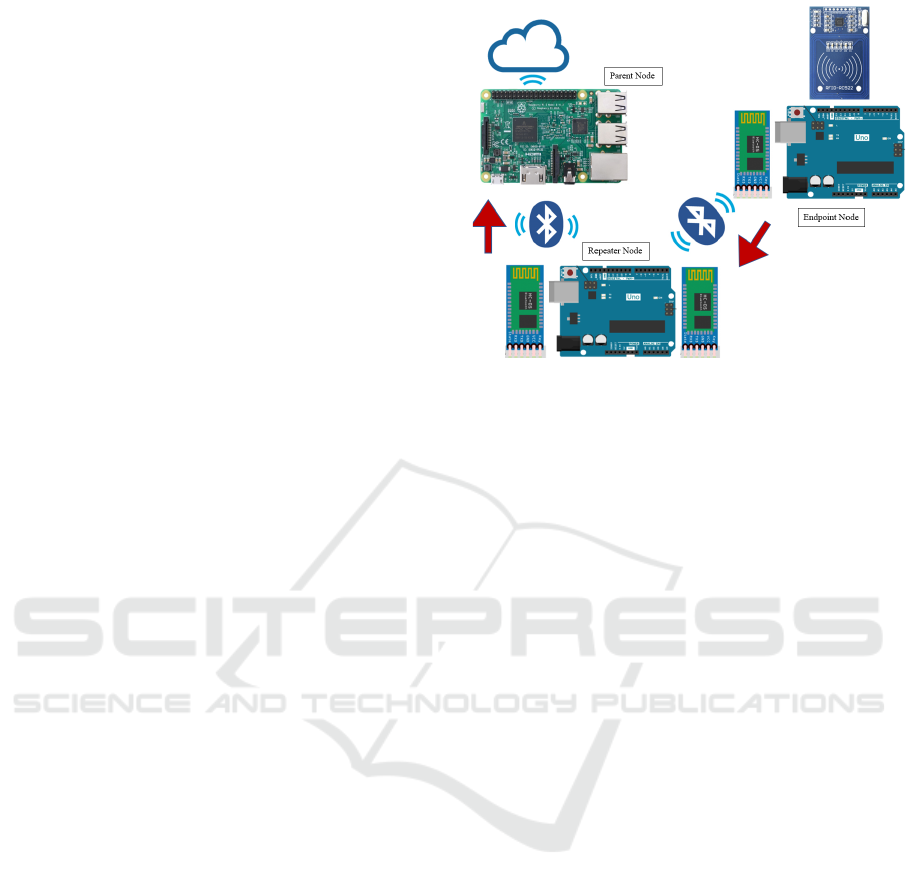
2.1 System Design
The overall design of the system for developing a
wireless mesh network between nodes to collect the
data and transport it into three layers of communica-
tion is shown in 1. These layers will be comprised
of several devices and modules that will create a net-
work. Within this network, information about traffic
from vehicles will be communicated to a cloud ser-
vice where data will be analyzed and sorted into cate-
gories that describe various road conditions
2.2 Parent Nodes
The Raspberry Pi acts as the gateway, which will
make it the only component of the entire system that
is able to receive data, send data, and upload data to
the cloud. The model being used is the Raspberry
Pi Model 3B, which was chosen since Bluetooth ca-
pabilities are preinstalled and will not require extra
modules to transmit the data along the network. Ad-
ditionally, this model Raspberry Pi also contains the
ability to be connected to Wi-Fi which is ideal for
testing since it can upload data at a faster rate. The
Raspberry Pi does have an additional 3G module that
can connect the Raspberry Pi to the server without the
use of Wi-Fi. The Raspberry Pi contains Python code
that allows the transmission of data from the Arduino,
and then the data collected will be saved as a CSV file
and then uploaded to the set server that will identify
patterns in traffic conditions.
2.3 Repeater Nodes
The Arduino Uno connected with two Bluetooth mod-
ules creates the repeater portion of the system. It
does so by receiving data through one of the Blue-
tooth modules then proceeding to process and con-
tinue sending the data so that it may be received by
the gateway in a readable format. The Arduino com-
pletes this process by first seeking an incoming mes-
sage from the Endpoint via the HC-05, then uses the
second Bluetooth module to relay the information to
the Gateway.
2.4 Endpoint Nodes
The endpoint Arduino Uno is the middle-point be-
tween the “vehicle” and the Repeater Arduino Uno.
Figure 1: System Design.
It is the first interaction between a vehicle and the
system itself. The endpoint Arduino is in charge of
collecting the data from the vehicles. The method
for this data collection involves the use of RFID
via a MFRC522 RFID Reader module added to the
endpoint Arduino operating at a frequency of 13.56
MHz. Radio-Frequency Identification allows a seam-
less, low-cost, and efficient way of transmitting data
from the vehicles to the system. The endpoint Ar-
duino collects the data, processes it, and then trans-
mits that data and information to the Repeater Ar-
duino. The method of transmitting this data is ac-
complished through Bluetooth, via a Bluetooth mod-
ule added to the Repeater Arduino. The program that
the Repeater Arduino uses to collect the data, pro-
cess it, and transmit was developed using the Arduino
IDE with the Arduino Uno and MFRC522 libraries.
The Endpoint Arduino along with the Repeater Ar-
duino have the capacity to be battery-powered, allow-
ing them to have their own independent power source.
2.5 Cloud Service
The cloud service being used is called ThingSpeak.
ThingSpeak is an Internet of Things (IoT) provider
that will allow the storing of data to be possible
through the internet. With ThingSpeak, it is possible
for one to send data through a private cloud, analyze
the collection data, and create graphs using MATLAB
and essentially act on the data as well. Utilizing this
service, a channel will be created to collect all the data
and effectively display the amount of data being col-
lected at different traffic conditions. This data will
be stored in the cloud and then saved as a CSV file,
which will then store and graph the data using a chan-
nel ID on ThingSpeak. On ThingSpeak, there are two
separate fields used to represent that number of cars
Smart Cities V2I Cloud based Infrastructure using Road Side Units
273
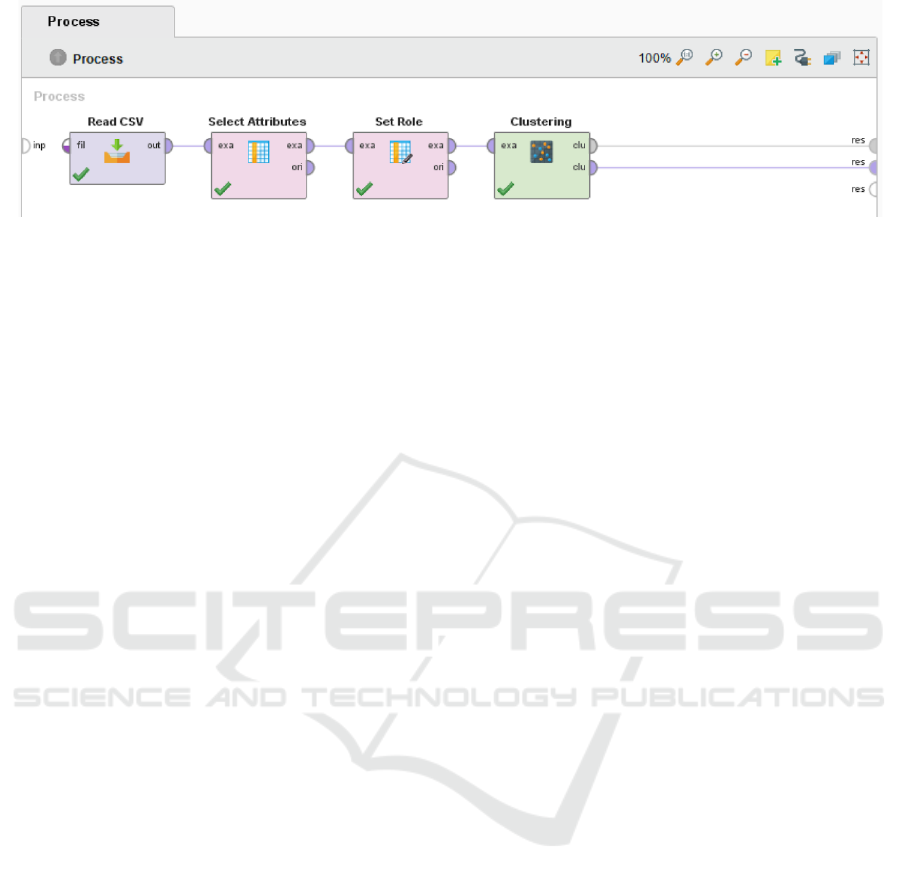
Figure 2: K-means Block Diagram.
passed and the location that the vehicle is at. From
here, the data will be classified in real time showing
the progression of traffic as well as the differentiation
of location.
2.6 System Data Analysis
RapidMiner is a data service software that will be
used to facilitate organizing, sorting and analyzing the
data received from the vehicles. The software is capa-
ble of providing a machine learning and deep learning
environment for our data to help discover meaningful
patterns in the data. The project will use RapidMiner
to demonstrate how the system can be beneficial once
implemented. More specifically, in this program, the
k-means clustering algorithm is used to cluster the
data created. These clusters are based off of similar-
ities between the data points uploaded from the CSV
file. The clusters will serve as classifications to our
three traffic scenarios, low traffic, medium traffic and
high traffic.
In order to utilize the k-means algorithm in Rapid-
Miner, the block operators as shown in 2 were used to
allow the data from the CSV file to be imported. The
select attributes operator’s purpose is to only select
the subset of attributes needed and exclude the other
data, so in this case, the entry ID number will be ex-
cluded. The set role block allows the user to select
the data in the number of vehicles passing and make
it target role. Lastly, the clustering operator uses the
k-means algorithm to classify a set of k-clusters based
on the similarity of the data.
K-means operates by taking n observations of in-
formation and creates k-sets by which to divide the in-
formation into. The algorithm that determines a mean
for each data set and uses that mean along with the
rest of the points present within the set to determine
the actual centroid of the data set. The algorithm fi-
nally uses the new centroid to determine if more data
points from the original set belong in its respective
cluster based on its variance from the centroid and
calculate it as follows equation 1:
arg
s
min
k
∑
i=1
∑
XεS
i
k
X − µ
i
k
= arg
s
min
k
∑
i=1
|
S
i
|
var S
i
(1)
In this equation, S
i
is the respective set that the clus-
ter is being determined for and µ
i
is the mean of the
points within S
i
as well.
3 SYSTEM CONFIGURATION
An important aspect of this project is being able to ob-
tain real-time and accurate data. The objective when
it comes to collecting data focuses on specific param-
eters. These parameters are localization, number of
cars passing, and a real time timestamp. With these
parameters, we hope to be able to create a RSU al-
gorithm which will allow for the traffic congestion to
be improved thoroughly. The sampling of data will
all revolve around a simulation which we will create
ourselves. It is difficult to test this out in a real-life
scenario because we do not have the resources for a
large-scale type of testing to be performed. The main
study variables will be the successful detection rate of
the RFID tags with the RFID readers. To maximize
the detection rate as much as possible, it is vital that
the readers on the side of the road are able to capture
the data from the vehicles RFID tags consistently, es-
pecially considering the speed of the vehicles as they
pass the readers. All data will be captured from the
vehicles and successfully passed through road-side
units and eventually to the cloud. The other detection
rate we will be observing is the transfer of data from
the road-side units to the vehicles’ on-board RFID
readers. A successful transfer of data between the
vehicle and the reader will include data such as the
number of vehicles passing by the RSU in order to
determine the volume of traffic. All of this data will
be uploaded to the cloud through the parent RSUs.
This will allow the classification of traffic scenarios.
Table1 shows the test bed specifications and Fig. 3
shows the used hardware.
The Raspberry Pi communicate with the Arduinos
IoTBDS 2021 - 6th International Conference on Internet of Things, Big Data and Security
274
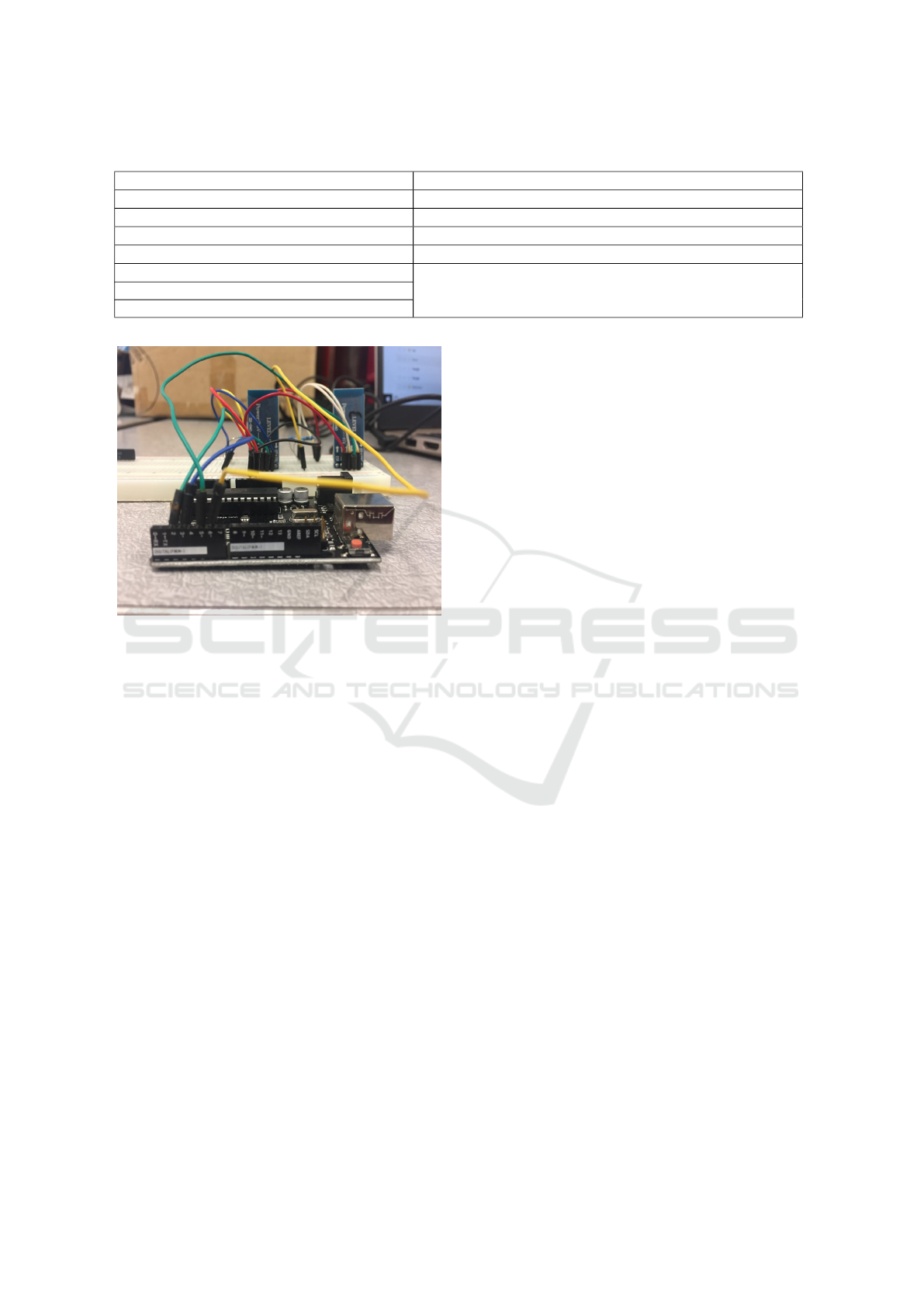
Table 1: Test bed specifications.
Component Description
Arduino Uno Data Gathering Child Nodes and data repeater nodes
HC-05 Bluetooth Module “AD-HOC” Network (connection in place for Wi-Fi option)
RFID-RC522 RFID Reader/Writer Components
Raspberry Pi 3 B+ Network Connected Parent Node
Raspberry Pi 3G-4G/LTE Base Shield V2
Provides 3G/4G capabilities for Raspberry PiQuectel UC20-G Mini PCle 3G Module
LTE-G-086 Cellular Miniature PCB Antenna
Figure 3: System Footprint.
to receive the data collected by them, and pro-
cess/store the data to a cloud service using wireless
and 4G communication. The Arduinos will work in
tandem to collect and transmit the data received from
the vehicles through the use of RFID and Bluetooth
communication. The Arduinos will then pass the data
along to the Raspberry Pi/Cloud network. The use of
an mPCI-E Base Shield and a UC20-G became nec-
essary as it will allow for 4G netwrok. Furthermore,
this connection is being made through the use of a
sim-card that is connected to the service provider and
ThingSpeak service is used to collect all the incom-
ing data through various channels that collects spe-
cific data and make a visual representation of the data.
This data is then being ran in RapidMiner which will
create K-mean map that shows a cluster of the data.
For relaying purpose two Arduinos are connected,
the goal was to connect the Endpoint Arduino, which
will receive the data from the vehicles, to the Repeater
Arduino, which will pass the data on to the Raspberry
Pi and continue along the mesh network. The method
of communication between the two Arduinos was
Bluetooth, using a HC-05 Bluetooth Module attached
to each Arduino. The Endpoint Arduino had both the
RFID RC522 module and the Bluetooth module at-
tached to it through its digital ports. The Repeater
Arduino had two HC-05 Bluetooth modules attached
to it through its digital ports. The Endpoint Arduino
was programed to keep track of the number of ve-
hicles that pass through the RFID scanner/simulated
road in a specified amount of time. In order to sim-
ulate data being collected from multiple sources, we
configured the code to switch between two identifiers
to mimic multiple endpoints so that we will have an-
other parameter by which to sort the data from. This
data was sent to the Repeater Arduino through Blue-
tooth to process and then transmit it to the Raspberry
Pi. The data for the number of vehicles passing by
was desired in order to analyze and determine what
the traffic congestion is on that certain route.
Three traffic scenario (low, medium, high) were
developed for testing purposes, the road being tested
will either have low traffic if the range of vehicles
passed was between 1-15, medium traffic from 16-
30 vehicles, and high traffic from 31-50 vehicles. The
data send and receive is done using the RFID Arduino
by transmitting that data over to the Raspberry Pi.
When configuring the Raspberry Pi 3 to be compat-
ible with the rest of the system, there were numerous
factors to ensure that it can connect to the Repeater
node. The first was ensuring that the native baud rate
of the Raspberry Pi matched the HC-05 that it was
to be paired with on the Arduino. This required sev-
eral commands to be written in the terminal to con-
nect the HC-05. Once paired the HC-05 was config-
ured to match the same baud rate of 115200, this re-
quired forcing the HC-05 into its AT command mode
where the UART number can be configured. This
baud rate was chosen due to its speed as well as the
ease to configure the HC-05 as opposed to the Rasp-
berry Pi. We then used a script that can take in the data
and display it on a common window. Once the entire
system was successfully connected, all that remained
was processing the data on the Raspberry Pi to pre-
pare it for use on RapidMiner. RapidMiner is a data
collection software with a clustering algorithm called
k-Means. This algorithm will take the data collected
from the cars and distribute it so it can be classified as
high traffic, medium traffic, and low traffic.
Smart Cities V2I Cloud based Infrastructure using Road Side Units
275

Figure 4: Number of vehicles Passing/Scan.
4 SIMULATION AND RESULTS
The goal of simulating the results was to have a ran-
dom number of passes for each 15 seconds with an al-
lowed maximum of 50 cars passing at a time as shown
in Fig.4. As progress continued on collecting data, the
group decided to find the limits of the range of Blue-
tooth communication for the RSUs. It was an inter-
esting characteristic to investigate, because the most
efficient way for cities to implement a system simi-
lar to ours will be to separate each child RSU as far as
possible in order to minimize the amount needed. The
group moved one RSU farther from another that it was
communicating with, until the pair lost connection to
each other. The group found the distance to be 78 feet
before the two RSUs can not send information to each
other. This was a considerable distance and surpassed
initial speculations. The design of the system was
made with the extremely limited budget in mind, so it
was motivating to see the inexpensive Bluetooth mod-
ules work at such a distance. This range can increase
by a very considerable amount for real-world appli-
cations as opposed to the small-scale model, with in-
creased budget and access to better technology can
extend the range of communication.
The design of the system was also efficient in
transmitting the data we desired to send. Taking less
than a second per data point to collect, we were able to
collect approximately 100 points from which to base
the rest of the project off of. The system was able
to properly simulate multiple locations and send in-
dicators for each; this data was also successfully pro-
cessed by the parent node and placeholder locations
Figure 5: Collected Traffic conditions by RSU.
were able to be created for the respective indicators.
After modifying the incoming data, that system was
also successful in uploading the data correctly to the
cloud server, Thing Speak, with no loss of data. In
Thing Speak, we were properly able to classify the
data into two different fields, one showing the num-
ber of vehicles passing and the second being the lo-
cation. The traffic conditions were classified as low
traffic if there were 1-15 vehicles passing, medium
traffic if there were 16-31 vehicles, and lastly high
traffic if there are 32 vehicles or more passing. For
testing purposes, there were 100 scans done. As pre-
sented below in Fig.5, the scanned traffic is focused
on mainly medium and low traffic.
When comparing the centroid values in the Table
2, it can be seen that the k-means algorithm is work-
ing as intended. By separating the data into three par-
titions, the algorithm was able to determine a value
that will become the center for each cluster, the cen-
troid. Using the average of the set of data points as the
centroid, the algorithm was able to determine roughly
the same range for the traffic conditions that we had
set prior to the experiment. The algorithm then set
a new centroid based on the points gathered in each
cluster which can be seen in Fig.5 One thing to note,
however, is that we did set our traffic parameters to
be roughly equal separations of our maximum traffic
value of 50, so it is interesting to see that the centroids
that were calculated created clusters that matched our
classifications.
IoTBDS 2021 - 6th International Conference on Internet of Things, Big Data and Security
276

Table 2: Test-Bed Specifications.
Centroid Table for Fig.5
Attribute Cluster 0 (Low Traffic) Cluster 1 (High Traffic) Cluster 2 (Medium Traffic)
# Vehicles Passing 3.811 41.839 23.594
5 CONCLUSIONS
Through the use of IoT devices, we were able to cre-
ate an ad-hoc mesh network using a cloud-based in-
frastructure from these Road Side Units. With this
system designed, there are 3 specific nodes discussed
– an endpoint node, repeater node, and a parent node.
After each tag is scanned by the RFID reader, the end-
point node will collect 2 specific parameters, the lo-
cation and the number of vehicles passed within a 15
second time range. The purpose of the repeater node
is to receive the data via the first Bluetooth module
and then relay that information to the parent node via
the second Bluetooth module. Lastly, the purpose of
the parent node is to act as a gateway by being able
to receive, send, and upload the collected data into
our cloud service provider, Thing Speak. With Thing
Speak, all the collected data is uploaded to the cloud
and can be exported as a CSV file. After this, Rapid
Miner, a data mining service is used to effectively uti-
lize the k-means clustering algorithm to display the
collected data into 3 clusters to show low, medium
and high traffic. With the final design, the system was
able to cover 78 feet indoors between the endpoint
and repeater RSUs.
REFERENCES
Albouq, S. S. and Fredericks, E. M. (2017). Securing
communication between service providers and road
side units in a connected vehicle infrastructure. In
2017 IEEE 16th International Symposium on Network
Computing and Applications (NCA), , MA.
Ansari, K., Wang, C., Wang, L., and Feng, Y. (2013).
Vehicle-to-vehicle real-time relative positioning using
5.9 ghz dsrc media. Las Vegas, NV. 2013 IEEE 78th
Vehicular Technology Conference (VTC Fall).
Ashritha M and Sridhar C S (2015). Rsu based efficient
vehicle authentication mechanism for vanets. In 2015
IEEE 9th International Conference on Intelligent Sys-
tems and Control (ISCO), pages 1–5.
Ferre, A., Fontanilles, J., Gamez, D., and Giordano, F.
(2013). Iwcm: Infrastructure wireless communication
module for vehicle communication with recharge in-
frastructure. Barcelona. 2013 World Electric Vehicle
Symposium and Exhibition (EVS27).
Khezrian, A., Todd, T. D., Karakostas, G., and Azimifar, M.
(2015). Energy-efficient scheduling in green vehicu-
lar infrastructure with multiple roadside units. IEEE
Transactions on Vehicular Technology, 64(5):1942–
1957.
kumar Gupta, S. and Khara, S. (2015). Technique to im-
prove the file transfer outcomes between road side unit
and vehicles in vehicular ad-hoc networks. In Inter-
national Conference on Computing, Communication
Automation, pages 360–366.
Kuo, W., Tung, Y., and Fang, S. (2013). A node manage-
ment scheme for r2v connections in rsu-supported ve-
hicular adhoc networks. In 2013 International Confer-
ence on Computing, Networking and Communications
(ICNC), pages 768–772.
Lee, J. (2018). How to build a wireless mesh network.
Lin, Y. and Rubin, I. (2017). Infrastructure aided network-
ing and traffic management for autonomous trans-
portation. San Diego, CA. 2017 Information Theory
and Applications Workshop (ITA).
Mostofi, S., Hammad, A., Todd, T. D., and Karakostas, G.
(2013). On/off sleep scheduling in energy efficient ve-
hicular roadside infrastructure. In 2013 IEEE Interna-
tional Conference on Communications (ICC), pages
6266–6271.
Ota, K., Kumrai, T., Dong, M., Kishigami, J., and Guo, M.
(2017). Smart infrastructure design for smart cities.
IT Professional, pages 42–49.
Salahuddin, M. A., Al-Fuqaha, A., and Guizani, M. (2015).
Software-defined networking for rsu clouds in support
of the internet of vehicles. IEEE Internet of Things
Journal, 2:133–144.
Santos, F. A., Akabane, A. T., Yokoyama, R. S., Loureiro,
A. A. F., and Villas, L. A. (2016). A roadside unit-
based localization scheme to improve positioning for
vehicular networks. Montreal, QC. 2016 IEEE 84th
Vehicular Technology Conference (VTC-Fall).
Sharmila, S. and Shanthi, T. (2016). A survey on wireless
ad hoc network: Issues and implementation. In 2016
International Conference on Emerging Trends in En-
gineering, Technology and Science (ICETETS), pages
1–6.
Silva, C. M. and Meira, W. (2015). Managing
infrastructure-based vehicular networks. In 2015 16th
IEEE International Conference on Mobile Data Man-
agement, volume 2, pages 19–22.
Silva, C. M. and Meira, W. (2016). An architecture integrat-
ing stationary and mobile roadside units for provid-
ing communication on intelligent transportation sys-
tems. IEEE/IFIP Network Operations and Manage-
ment Symposium, Istanbul.
Wibisono, G. and Bayhaki, A. (2015). Design and im-
plementation of smart wireless street lighting system
with ad-hoc network configuration. In 2015 9th In-
ternational Conference on Electrical and Electronics
Engineering (ELECO), pages 559–563.
Smart Cities V2I Cloud based Infrastructure using Road Side Units
277
