
Hybrid Approach to Promote Social Interaction with Children with
Autism Spectrum Disorder
Vinícius Silva
1a
, Filomena Soares
1b
, João Sena Esteves
1c
, Ana P. Pereira
2d
, Celina P. Leão
1e
and Sandra Queirós
1
1
Centro Algoritmi, Engineering School, University of Minho, 4800-058 Guimarães, Portugal
2
Research Centre on Education, Institute of Education, University of Minho, Braga, Portugal
sandraqueiros94@gmail.com
Keywords: Human Robot Interaction, Autism Spectrum Disorder, Playware Technology.
Abstract: The comprehension of the emotional state of others is paramount for a successful human interaction.
Individuals with Autism Spectrum Disorder (ASD) have impairments in social communication and,
consequently, they have difficulties to interpret others’ state of mind. In order to tackle this issue, researchers
have been proposing the use of technological solutions to assist children with ASD, particularly in imitation
and emotion recognition tasks. Social robots and Objects with Playware Technology (OPT) have been
employed as intervention tools with children with ASD. This work presents an approach combining both
technologies (robots and OPT), in a hybrid way, with the goal of promoting social interaction with children
with ASD. Moreover, a new OPT device was developed to be used as an add-on to the human-robot interaction
with children with ASD in two emotion recognition tasks – recognize and storytelling. A pilot study was
conducted with children with ASD to evaluate the proposed method. All children successfully participated in
the activities. Moreover, children significantly gazed longer towards the OPT during the storytelling scenario
as the OPT device displayed visual cues, supporting that using a visual cue may be fundamental in helping
children with ASD understand requests and tasks.
1 INTRODUCTION
Autism Spectrum disorder (ASD) is a
neurodevelopment disability that affects 1 in 54
individuals. It is characterized by the diagnostic
criteria that include impairments in social
communication and social interaction, with the
existence of restricted, repetitive patterns of
behaviour, or activities that may continue throughout
life (American Psychiatric Association, 2013). The
diagnosis can be done correctly in early stages of life
(around the 36 months of age). Due to the diversity
and specificities of symptoms, developing effective
intervention is still challenging.
In order to tackle this issue, new forms of
intervention have been explored and conducted in the
last years by employing the use of technological
a
https://orcid.org/0000-0003-0082-343X
b
https://orcid.org/0000-0002-4438-6713
c
https://orcid.org/0000-0002-3492-1786
d
https://orcid.org/0000-0003-4611-7602
e
https://orcid.org/0000-0003-3725-5771
devices such as robots, tangible interfaces/Objects
with Playware Technology (OPT) and mechanical
components, among others. Indeed, some studies
(Dautenhahn & Werry, 2004; Tapus et al., 2012)
conducted by using technological tools showed that
children with ASD have great affinity with them. In
particular, it has been shown that individuals
demonstrated improvements in social behaviours
such as imitation (Fujimoto, Matsumoto, de Silva,
Kobayashi, & Higashi, 2011), eye gaze, and motor
ability, while increasing attention (Kim, Paul, Shic, &
Scassellati, 2012) when interacting with robots.
Moreover, it was also identified that children with
ASD may exhibit certain positive social behaviours
when interacting with robots in contrast to what is
perceived when interacting with their peers,
caregivers, and professionals (Gillesen, Barakova,
Silva, V., Soares, F., Esteves, J., Pereira, A., Leão, C. and Queirós, S.
Hybrid Approach to Promote Social Interaction with Children with Autism Spectrum Disorder.
DOI: 10.5220/0010468600690077
In Proceedings of the 7th International Conference on Information and Communication Technologies for Ageing Well and e-Health (ICT4AWE 2021), pages 69-77
ISBN: 978-989-758-506-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
69

Huskens, & Feijs, 2011). In addition to being
repeatable and objective, social robots are designed to
identify, measure, and react to social behaviours,
offering an exceptional occasion for quantifying
social behaviours (Tapus, Member, & Scassellati,
2007). Therefore, robots may be very promising on
intervention settings with children with autism,
especially in tasks such as emotion recognition and
collaborative peers’ interaction.
Several physical designs, ranging from simple
designs such as four-wheeled mobile robots (Ferrari,
Robins, & Dautenhahn, 2009) to many levels of
anthropomorphic forms, including humanoid (Soares
et al., 2019), animal-like (Breazeal, 2000), and
machine-like systems (Michaud et al., 2005), have
been used. Since the robot’s physical appearance
plays an important role in the interaction process with
a person, recent research in the area of social robots
have been consistently using robots with a humanoid-
like design (Pennisi et al., 2016), especially in tasks
of imitation and emotion recognition, offering a great
potential for generalisation. The FACE (Mazzei et al.,
2011) and ZECA (Soares et al., 2019) projects use
facial expressive humanoid robots in emotion
recognition tasks to promote social interaction with
individuals with ASD.
Analogous to the use of social robots, OPT
devices have also been used as a form of interaction
with children with ASD. With the goal of offering
playful experiences to the end user, these devices are
tangible interfaces developed for children’s play
(Lund, Klitbo, & Jessen, 2005). The term “playware”
is suggested as a combination of intelligent hardware
and software, emphasizing the role of interplay
between morphology and control using processing,
input, and output.
Few works focusing on OPT with different
configurations such as modular buttons, coloured
puzzle tiles (Lund & Marti, 2009), Lego-like building
blocks (Barajas, Al Osman, & Shirmohammadi,
2017), interactive screens (Boucenna et al., 2014),
among others have been proposed. An example of a
work where OPT devices were used with children
with ASD consisted in designing interactive tiles as a
modular robotic playware with the goal of being
flexible in both setup and activity building for the end
user, allowing easy creation of games (Lund, Dam
Pedersen, & Beck, 2009). The tiles had a quadratic
shape with self-contained energy source and wireless
communication (local and global), and different
games. An example of a game conducted during
experiments with children with ASD consisted in
mixing the tiles in different combinations to produce
more colours. More specifically, there were three
main tiles with fixed colours (mainly red, green, and
blue), and using the secondary tiles (a total of 12),
with the property of changing their colours
accordingly to their neighbours colour, a new colour
could be created by mixing the neighbours tiles
colours. For example, if a secondary tile was placed
between two main tiles of colours red and blue, the
middle tile (secondary) would change its colour to
purple, blending the two main colours. The
experiments carried out with seven children with
ASD allowed the authors to conclude that devices
built with playware technology may offer an
interesting novel research direction. Through this
research direction, this issue will be further
investigated in order to verify how playware can be
used as playful tool for cognitive challenged children,
giving them a playful experience and automatically
infer the playful interaction to provide insight (and
possible a diagnosis).
Following this trend, it was proposed and
evaluated a novel approach combining both
technologies (robots and OPT), in a hybrid way, with
the goal of promoting social interaction with children
with ASD (Silva, Soares, Esteves, & Pereira, 2018).
The present work shows the developments of this
approach as well as the development of a new OPT
device to be used as an add-on to the human-robot
interaction with children with ASD in emotion
recognition tasks. This hybrid approach was
evaluated through experiments conducted with these
children. The main goal of the pilot study was to
assess the constraints of both the game design as well
as the OPT rather than to evaluate the performance of
each child.
The rest of this paper is organized as follows:
Section 2 presents the proposed approach with the
description of the OPT; Section 3 shows the results;
Section 4 discusses the results obtained; the conclus-
ions and future work are addressed in Section 5.
2 MATERIAL AND METHODS
This section provides the description of the developed
OPT with the procedures followed to evaluate the
current proposed approach.
2.1 Proposed System
The system, depicted in Fig. 1, consists of a facial
expressive humanoid robot, a processing unit, and the
OPT device PlayBrick.
The humanoid robot used is the model Zeno R50
from Robokind. ZECA (Zeno Engaging Children with
ICT4AWE 2021 - 7th International Conference on Information and Communication Technologies for Ageing Well and e-Health
70

Autism) has a child-like appearance with 34 degrees
of freedom: 4 being located in each arm, 6 in each leg,
11 in the head, and 1 in the waist. The robot is capable
of expressing facial expressions thanks to the servo
motors mounted on its face and a special material,
Frubber, which has a similar look and feel to human
skin.
Figure 1: Proposed system setup. Starting from the left: the
developed OPT (PlayBrick), central processing unit, and
the humanoid robot ZECA.
The Robokind software performs animation and
motion control functions and it includes an
Application Programming Interface (API) for rapid
integration of other components and shared control.
Regarding the OPT, the design approach consisted
in developing a device that can offer a tangible
experience, adapt itself to different games scenarios
and provide immediate feedback. It was designed with
the purpose of being used in different activities and
contexts by physically (re)programming it or by adding
new components such as sensors. This may offer an
exceptional opportunity to measure behaviours since
children with ASD are less willing to use wearable
devices (Bekele, Crittendon, Swanson, Sarkar, &
Warren, 2014), which may be a challenge when trying
to extract additional behaviour information. The
addition of feedback from the OPT to the user is a key
feature that allows guiding the child through the play
activity and to enjoy the experience in all its fullness.
Since the users expect to see and feel the results of their
actions, the immediate feedback feature is a very
important factor specially when designing devices for
children with impairments. Furthermore, learning via
reinforcement can be one of the most effective
approaches to reinforcing desired behaviours,
particularly with children with ASD, allowing the
formation of an association between a suggestion or
action and a reinforcement with some intrinsic
motivational value (Schuetze, Rohr, Dewey,
McCrimmon, & Bray, 2017). Since the experience
should be configurable, the type of feedback should
also be adaptable according to the child preferences.
For example, some types of feedback may be
uncomfortable for some children with ASD, such as
the sound feedback that may be unenjoyable since
some individuals are oversensitive to environmental
stimuli (Schoen, Paul, & Chawarska, 2011).
Following these ideas, the developed OPT,
PlayBrick (Fig. 2), was designed to provide a tangible
and adaptive experience, being easy and intuitive to
manipulate through natural gestures (such as touch,
tilt, rotation), with different sources of immediate
feedback (haptic and visual). The PlayBrick has a 5.0-
inch touch screen, an Inertial Measurement Unit
(IMU), a haptic driver with a Linear Resonant
Actuator (LRA), and a LED RGB strip. It has built-in
Bluetooth and Wi-Fi communication.
Figure 2: General view of the PlayBrick and its main
components.
2.2 Designing the End User Activity
The developed activities are focused on emotion
recognition tasks. The first task, denominated
recognize, consists in the robot displaying randomly
one of the five basic facial expressions (happiness,
sadness, anger, surprised, and afraid) and its
associated gestures (body posture), Fig. 3. Then, the
child is prompted to identify the emotion associated
with the facial expression.
Figure 3: The different facial expressions displayed by the
robot ZECA: a) anger, b) fear, c) happiness, d) surprise, and
e) sadness (Soares et al., 2019).
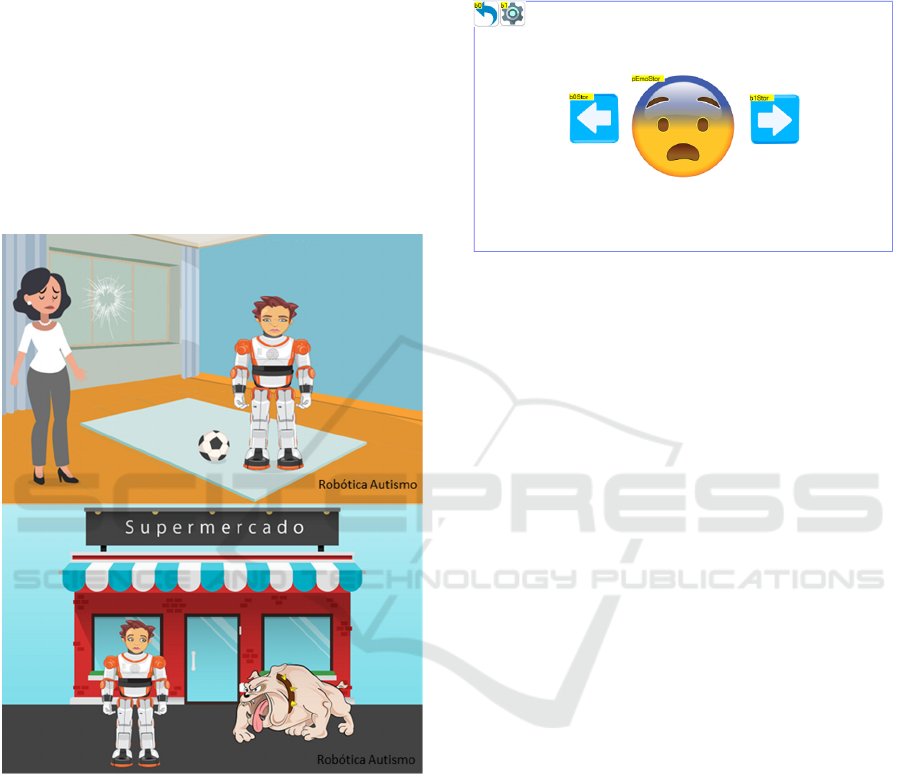
The second task is the storytelling game, in which
randomly selected stories among 15 social stories are
told by the robot, and the participant has to identify
the emotion of the main actor, i.e. the robot (Fig. 4).
The identification of emotions displayed by other
people is essential (Clark, Winkielman, & McIntosh,
2008), being fundamental for successful social
interactions. As most children with ASD have
Hybrid Approach to Promote Social Interaction with Children with Autism Spectrum Disorder
71
alterations in the central auditory processing, vision
is one of the strongest skills of individuals with ASD
(Caldeira da Silva et al., 2012), meaning that using a
visual support can be fundamental in helping children
with ASD understand requests and tasks. Therefore,
each social story has its associate visual
representation of the story scenario. As the robot
starts telling the story, an image is simultaneously
shown representing the social context of the story as
a visual cue (Fig. 4). Then, the child is prompted to
answer how the robot felt in that story scenario.
In both game scenarios, the child selects the
answer by tilting back and forward the PlayBrick,
scrolling through the facial expressions (common
emoji) displayed by the OPT and touching the image.
Figure 4: Sample of images for the storytelling game
scenario. The scenario A represents the sad emotion, with
the following story: “I like to play when I’m at home. Today
I took my ball and played with the ball in the living room. I
kicked strongly the ball and broke a window. My mother me
scolded me and I cried.” The visual cue B represents the
fear emotion, with the following story: “I go with my mother
shopping. I like to choose the yogurts that I eat. Today, at
the exit of the supermarket, a very large dog began barking
very loud. I was shaking.”
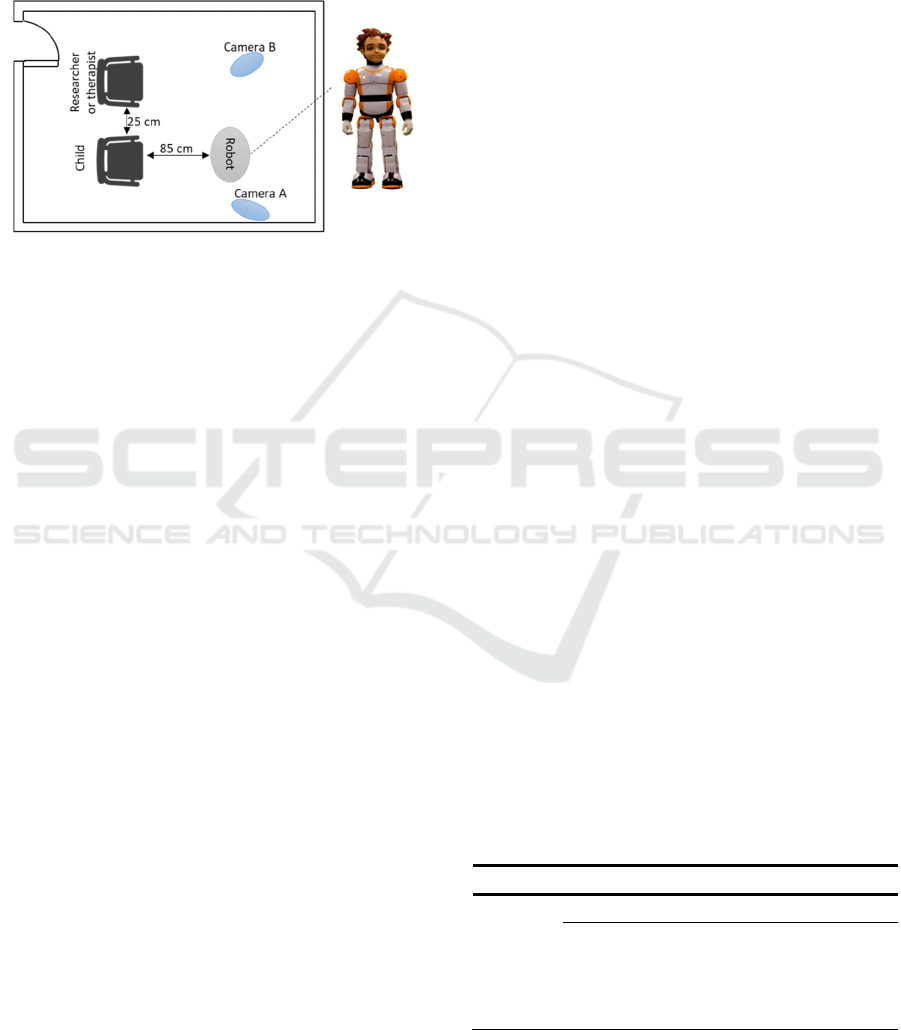
The type of input is also configurable, meaning
that if a child has difficulties in manipulating (tilting)
the device, the interface changes by showing two
arrows that also allow the participant to search and
select the possible answer (Fig. 5). In parallel, when
the answer is selected, a positive or negative
reinforcement is prompted by ZECA and the
PlayBrick. The type of reinforcement is configurable
on both the robot and the OPT according to the child
preferences.
Figure 5: Prompted interface to the child on the OPT screen
to select the answer. The arrows are visible in case the child
has difficulties in manipulating the PlayBrick.
2.3 Procedures and Participants
Tests following the experimental design in Fig. 6
were conducted in a school environment in a triadic
setup, i.e., child-robot-researcher. The goal of the
pilot study was to detect the systems constraints and
verify if the system can implement a procedure that
makes the children able to interact in a comfortable
and natural way during an intervention session.
In the experimental setup used in the school, the
child sits in front of the robot, which is positioned at
approximately 85 cm from the child’s line of sight.
Two cameras are placed behind the robot in order to
video record the sessions. One camera (A) records
only the child and camera B records the overall
session. The researcher is seated next to the child in
order to assist the child during the task. This layout is
proposed in order to establish a basis of comparison
between the participants along the sessions, since the
experiments are conducted in an unconstrained (in
this case a school) but familiar setting for the child.
All procedures involving the children with ASD
during the study were conducted in accordance with
the following ethical concerns: the research work was
approved by the ethical committee of the university
of Minho, a collaboration protocol was firmed
between the university and the school, and informed
consents were signed by the parents/tutors of the
children that participated in the studies.
A sample of 4 children previously diagnosed with
ASD aged 6 to 10 years (M= 8.75; SD=0.96) was
selected to participate in this study. From here on, the
children are identified as A, B, C, and D. Although
ASD is more prevalent in boys (Christensen et al.,
A
B
ICT4AWE 2021 - 7th International Conference on Information and Communication Technologies for Ageing Well and e-Health
72
2016), the selected sample has as many boys (2) as
girls (2). All children that participated in the study are
verbal but their attempts to initiating interactions and
make friends are odd and typically unsuccessful –
which corresponds to level 1 of severity levels of
DSM5 in 2013. The participants are high functioning,
according to their diagnosis.
Figure 6: The experimental design used during the
experiments in a triadic configuration: child, robot,
researcher.
According to the therapists, the type of reinforcement
used in the study was the same for three children
(robot: verbal + movement + sound; PlayBrick: visual
+ haptic) and different from one child (robot: verbal +
movement; PlayBrick: visual + haptic).
The study was carried out during four sessions
spaced one week between the second and the third
session. In the first session the children played the
recognize game scenario. The storytelling activity
was conducted in the 3 remaining sessions (Fig. 6).
2.4 Analysis
The videos of the experiments of the 4 sessions were
coded by one observer specialized in behavioural
psychology. To assess the children’s engagement
during the activity, the frequency of children’s gaze
towards to the robot and to the PlayBrick as well as
the duration of such events were registered. The
number of times that the children needed help and the
number of wrong usages of the PlayBrick were
counted. Additionally, the number of correct,
incorrect, and unanswered answers as well as the
number of total robot prompts during the sessions
were quantified. The children’s mean response time
to the robot’s prompts were also registered. At the end
of each session, the robot asked the participant if
he/she wanted to play more. This was also quantified.
The non-parametric Wilcoxon signed-rank test
(alternative to parametric paired t-test) was used to
compare the children’s attention during the
storytelling game scenario. This test will be reported
by using the Z statistic.
3 RESULTS
A set of experiments were carried out in a school
setting involving four children with ASD (children A,
B, C, and D). Both activities (recognize and
storytelling) were played.
Regarding the children’s attention it was found
that, in general, children gazed more towards to the
robot in the first session (recognize game scenario),
Fig. 7. In the other sessions (storytelling) the children
tended to gaze more at the OPT device.
Furthermore, the children’s mean duration per
gaze, in general, was higher towards the PlayBrick
than towards the robot (Fig. 8). In particular, the
children’s mean duration per gaze in the storytelling
game scenario was significantly less for the gazes
directed at the robot (M=5.28; SD=1.76) than those
directed at the PlayBrick (M=12.58; SD=2.97), Z=-
3.059, p<0.001.
Figure 9 shows the number of right and wrong
answers, as well as the number of no answered
prompts. In general, it is possible to notice a positive
evolution, regarding the number of successful
answers along the sessions. Moreover, the
participants answered all of the robot’s prompts.
In general, the children’s mean response time to
the robot prompts increased between the first session
(where the recognize activity occurred) and the
second session (where the storytelling game scenario
was played), Fig. 10-A. Regarding sessions 3 and 4,
the children’s mean response time remain, in general,
unchanged.
Additionally, the number of times that a child
needed help (Fig. 10-B) on how to manipulate the
PlayBrick decreased over the sessions.
During the study only one child manipulated
wrongly the PlayBrick, two times, being assisted by the
researcher on how to correctly manipulate de device.
Table 1 shows the sessions where each participant
answered positively (‘✓’) to the robot asking if he/she
wants to play more.
Table 1: The sessions where the children wanted to
continue the activity (‘
✓ ’).
Child Session
1 2 3 4
A
✓ ✓ ✓ -
B
✓ - - -
C
- ✓ - -
D
-
✓ ✓ ✓
Hybrid Approach to Promote Social Interaction with Children with Autism Spectrum Disorder
73
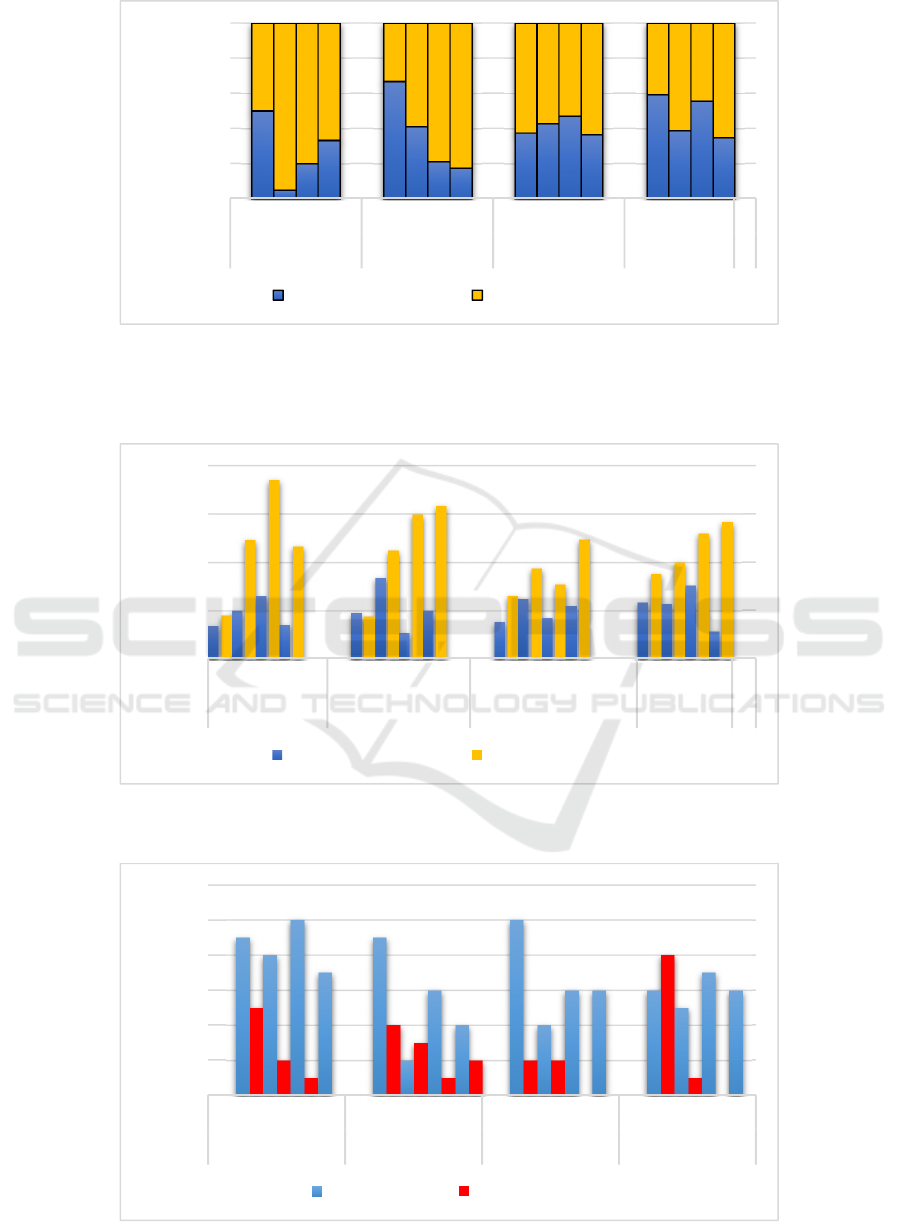
Figure 7: Percentage and number of gazes towards the robot and the PlayBrick for the 4 children (A, B, C, and D) during the
sessions for the game scenarios recognize (session 1) and storytelling (sessions 2, 3, and 4). It is possible to perceive that,
overall, the children gaze more towards to the robot in the first session. In the remaining sessions, children tended to look
more at the PlayBrick.
Figure 8: Mean gaze time towards the robot and the PlayBrick for the 4 children (A, B, C, and D) during the sessions for the
game scenarios recognize (session 1) and storytelling (sessions 2, 3, and 4).
Figure 9: Children’s answers to the robot prompts during the four sessions.
6
1
2
7
14
7
4
3
9
9
8
8
16
7
5
8
6
19
8
14
7
10
15
14
15
12
9
14
11
11
4
15
0%
20%
40%
60%
80%
100%
1234 1234 1234 1234
ABCD
Percentage of Gazes
Look at the robot(B1) Look at the OPT(B2)
0
5
10
15
20
1234 1234 1234 1234
AB CD
Mean gaze time (s)
Look to the robot(B1) Look to the OPT(B2)
0
2
4
6
8
10
12
1234 1234 1234 1234
ABCD
Number of answers
#RightAnswers #WrongAnswers
ICT4AWE 2021 - 7th International Conference on Information and Communication Technologies for Ageing Well and e-Health
74
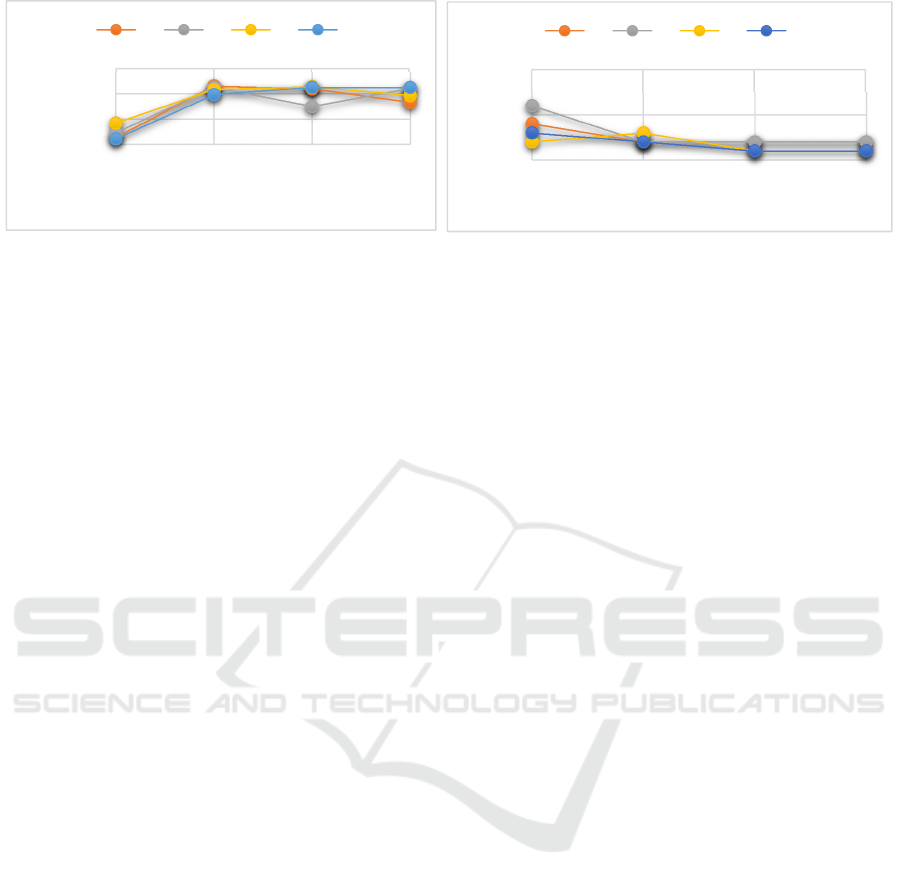
Figure 10: A – Children’s mean response time in seconds (with confidence interval) to the robot prompts during the four
sessions. B – Number of times that each child need help to interact with the PlayBrick over the four sessions.
4 DISCUSSION
Concerning children’s attention in the activity, there
were more gazes towards the robot during the first
session compared to the other sessions (Fig. 7), since
during this activity the child had to look at the robot
face in order to identify the robot facial expression.
However, the mean gaze time towards to the robot, in
general, was lower when compared to the mean gaze
time towards the PlayBrick, Fig. 8. The mean gaze
time towards the OPT was significantly higher (p-
value lower than 0.05 significance level) during the
sessions where the storytelling game was conducted,
indicating that the children relied on the storytelling
visual cues displayed by the PlayBrick. This supports
that the use of visual cues may be paramount for
children with ASD to understand the tasks. In
addition, the children answered all prompts and the
number of right answers were superior to the number
of wrong answers (Fig. 9), further supporting that the
children understood the games and successfully
interacted with the PlayBrick. Moreover, the children
rapidly adapted and learned how to interact with the
OPT and the robot, since the number of times that
each child needed help during the activities decreased
over the sessions, Fig. 10-B.
The mean response time to the robot prompts
during the storytelling activity was higher when
compared to the recognize activity (Fig. 10-A), which
is expected since during this activity the child has to
identify the state of mind of the main character of the
story.
In general, all children wanted to continue the
activities (Table 1), meaning that they enjoyed and
were successfully engaged in the activities.
Additionally, it is worth mentioning that none of the
children that participated in this study ever abandoned
an activity.
5 CONCLUSIONS
The comprehension of social emotional cues is
important for a successful human communication.
However, individuals with ASD present impairments
in social communication. New forms of intervention
have been explored and conducted in the last years by
employing the use of technological devices trying to
mitigate the emotion recognition impairments that
children with ASD present.
Following this idea, the present work shows the
developments of a hybrid approach in human-robot
interaction with children with ASD in emotion
recognition tasks. This hybrid approach includes the
OPT device PlayBrick, used as an add-on to the
humanoid robot intervention.
By analysing the results, it is possible to conclude
that the children understood the mechanics of the
games and successfully interacted with PlayBrick.
There was a significant difference in the mean gaze
time towards the OPT, particularly in the storytelling
scenario, suggesting that the children used/relayed on
the PlayBrick during the activities. Moreover, in
general, the children were keen to participate in the
activities since they wanted to continue on playing.
Additionally, they were also attentive to the
PlayBrick feedback, lights, haptic as well as the
images for correct and incorrect answers displayed on
the screen.
The future work includes further improvements of
this hybrid approach. A study will be conducted
involving a larger sample of children with ASD to
understand if and how the presented method may be
used as a valuable tool to promote social interaction
with children with ASD.
30
40
50
60
1234
Mean response time
(s)
Session
A B C D
-1
4
9
1234
Number of help times
Session
A B C D
A
B
Hybrid Approach to Promote Social Interaction with Children with Autism Spectrum Disorder
75

ACKNOWLEDGEMENTS
This work has been supported by FCT – Fundação
para a Ciência e Tecnologia within the R&D Units
Project Scope: UIDB/00319/2020. Vinicius Silva
thanks FCT for the PhD scholarship SFRH/BD/
SFRH/BD/133314/2017. The authors thank the
teachers and students of the Elementary School of
Gualtar (EB1/JI Gualtar) in Braga for their
participation in the study.
REFERENCES
American Psychiatric Association, 2013. Diagnostic and
Statistical Manual of Mental Disorders, 5th Edition
(DSM-5), Diagnostic and Statistical Manual of Mental
Disorders 4th edition TR., p. 280. doi:
10.1176/appi.books.9780890425596.744053.
Barajas, A. O., Al Osman, H. and Shirmohammadi, S.,
2017. A Serious Game for children with Autism
Spectrum Disorder as a tool for play therapy, in 2017
IEEE 5th International Conference on Serious Games
and Applications for Health, SeGAH 2017. doi:
10.1109/SeGAH.2017.7939266.
Bekele, E. et al., 2014. Pilot clinical application of an
adaptive robotic system for young children with autism,
Autism : the international journal of research and
practice, 18(5), pp. 598–608. doi:
10.1177/1362361313479454.
Boucenna, S. et al., 2014. Interactive Technologies for
Autistic Children: A Review, Cognitive Computation,
6(4), pp. 722–740. doi: 10.1007/s12559-014-9276-x.
Breazeal, C., 2000. Sociable machines: Expressive social
exchange between humans and robots, Expressive
Social Exchange Between Humans and Robots.
Available at:
http://groups.csail.mit.edu/lbr/mars/pubs/phd.pdf.
Caldeira da Silva, P. et al., 2012. Programa clínico para o
tratamento das perturbações da relação e da
comunicação, baseado no Modelo D.I.R., Análise
Psicológica. doi: 10.14417/ap.116.
Christensen, D. L. et al., 2016. Prevalence and
Characteristics of Autism Spectrum Disorder Among
Children Aged 8 Years — Autism and Developmental
Disabilities Monitoring Network, 11 Sites, United
States, 2012, MMWR. Surveillance Summaries, 65(3),
pp. 1–23. doi: 10.15585/mmwr.ss6503a1.
Clark, T. F., Winkielman, P. and McIntosh, D. N., 2008.
Autism and the Extraction of Emotion From Briefly
Presented Facial Expressions: Stumbling at the First
Step of Empathy, Emotion. doi: 10.1037/a0014124.
Dautenhahn, K. and Werry, I., 2004. Towards interactive
robots in autism therapy: Background, motivation and
challenges, Pragmatics & Cognition, 12(1), pp. 1–35.
doi: 10.1075/pc.12.1.03dau.
Ferrari, E., Robins, B. and Dautenhahn, K., 2009.
Therapeutic and educational objectives in robot assisted
play for children with autism, IEEE International
Workshop on Robot and Human Interactive
Communication (Ro-Man), pp. 108–114. doi:
10.1109/ROMAN.2009.5326251.
Fujimoto, I. et al., 2011. Mimicking and evaluating human
motion to improve the imitation skill of children with
autism through a robot, International Journal of Social
Robotics, 3(4), pp. 349–357. doi: 10.1007/s12369-011-
0116-9.
Gillesen, J. C. C. et al., 2011. From training to robot
behavior: Towards custom scenarios for robotics in
training programs for ASD, in IEEE International
Conference on Rehabilitation Robotics. doi:
10.1109/ICORR.2011.5975381.
Kim, E. et al., 2012. Bridging the Research Gap: Making
HRI Useful to Individuals with Autism, Journal of
Human-Robot Interaction, pp. 26–54. doi:
10.5898/JHRI.1.1.Kim.
Lund, H. H., Dam Pedersen, M. and Beck, R., 2009.
Modular robotic tiles: Experiments for children with
autism, Artificial Life and Robotics, 13(2), pp. 394–
400. doi: 10.1007/s10015-008-0623-4.
Lund, H. H., Klitbo, T. and Jessen, C., 2005. Playware
technology for physically activating play, Artificial
Life and Robotics, 9(4), pp. 165–174. doi:
10.1007/s10015-005-0350-z.
Lund, H. H. and Marti, P., 2009. Designing modular robotic
playware, Proceedings - IEEE International Workshop
on Robot and Human Interactive Communication, pp.
115–121. doi: 10.1109/ROMAN.2009.5326286.
Mazzei, D. et al., 2011. Development and evaluation of a
social robot platform for therapy in autism, Engineering
in Medicine, Proceedings of the Annual International
Conference of the IEEE, 2011, pp. 4515–8. doi:
10.1109/IEMBS.2011.6091119.
Michaud, F. et al., 2005. Autonomous spherical mobile
robot for child-development studies, IEEE Transactions
on Systems, Man, and Cybernetics - Part A: Systems
and Humans, 35(4), pp. 471–480. doi:
10.1109/TSMCA.2005.850596.
Pennisi, P. et al., 2016. Autism and social robotics: A
systematic review, Autism Research, pp. 165–183. doi:
10.1002/aur.1527.
Schoen, E., Paul, R. and Chawarska, K., 2011. Phonology
and vocal behavior in toddlers with autism spectrum
disorders, Autism Research. doi: 10.1002/aur.183.
Schuetze, M. et al., 2017. Reinforcement learning in autism
spectrum disorder, Frontiers in Psychology. doi:
10.3389/fpsyg.2017.02035.
Silva, V. et al., 2018. Building a hybrid approach for a game
scenario using a tangible interface in human robot
interaction, in Lecture Notes in Computer Science
(including subseries Lecture Notes in Artificial
Intelligence and Lecture Notes in Bioinformatics). doi:
10.1007/978-3-030-02762-9_25.
Soares, F. O. et al., 2019. Socio-emotional development in
high functioning children with Autism Spectrum
Disorders using a humanoid robot, Interaction Studies
Social Behaviour and Communication in Biological
ICT4AWE 2021 - 7th International Conference on Information and Communication Technologies for Ageing Well and e-Health
76

and Artificial Systems, 20(2), pp. 205–233. doi:
10.1075/is.15003.cos.
Tapus, A. et al., 2012. Children with autism social
engagement in interaction with Nao, an imitative
robot’, Interaction Studies, 13(3), pp. 315–347.
Tapus, A., Member, S. and Scassellati, B., 2007. The Grand
Challenges in Socially Assistive Robotics, IEEE
Robotics and Automation Magazine, 14, pp. 1–7. doi:
10.1109/MRA.2010.940150.
Hybrid Approach to Promote Social Interaction with Children with Autism Spectrum Disorder
77
