
Comparison of Camera-Equipped Drones and Infrastructure Sensors for
Creating Trajectory Datasets of Road Users
Amarin Kloeker
a
, Robert Krajewski
b
and Lutz Eckstein
Institute for Automotive Engineering, RWTH Aachen University, Steinbachstr. 7, 52074 Aachen, Germany
Keywords:
Automated Driving, Trajectory Dataset, Drone, Infrastructure Sensors, ITS-S, Computer Vision.
Abstract:
Due to the complexity of automated vehicles, their development and validation require large amounts of nat-
uralistic trajectory data of road users. In addition to the classical approach of using measurement vehicles
to generate these data, approaches based on infrastructure sensors and drones have become increasingly pop-
ular. While advantages are postulated for each method, a practical comparison of the methods based on
measurements of real traffic has so far been lacking. We present a theoretical and experimental analysis of two
image-based measurement methods. For this purpose, we compare measurements of a drone-based system
with a prototypical camera-based infrastructure sensor system. In addition to the detection statistics of the
road users, the detection quality of both systems is also investigated using a reference vehicle equipped with
an inertial navigation system. Through these experiments, we can confirm each approach’s advantages and
disadvantages emerging from the theoretical analysis.
1 INTRODUCTION
The development of automated vehicles is a trend that
will significantly shape the traffic of the future. In-
telligent systems will gradually take over the driving
task from the driver, thereby increasing the safety,
comfort and efficiency of future mobility. On the
way to fully automated driving, however, a number
of challenges have to be overcome. In comparison
to a simple advanced driver assistance system, an au-
tomated vehicle has a large number of sensors such
as cameras, radars and LiDARs. Through these sen-
sors, it must perceive its immediate static as well as
dynamic environment precisely. Furthermore, an au-
tomated system has to take over the control of the ve-
hicle permanently instead of only rarely being really
active, like e.g. an emergency braking system. Fi-
nally, the Operational Design Domain or the number
of possible scenarios is large, especially in urban ar-
eas.
Due to the resulting complexity, many problems
during the development and validation of automated
vehicles are no longer solved conventionally, but data-
driven. This development started with perception, for
which camera images have been processed by neu-
a
https://orcid.org/0000-0003-4984-2797
b
https://orcid.org/0000-0001-7288-0172
Figure 1: Visualization of the measurement setup. A drone-
based measurement system is compared to a camera-based
system positioned on a bridge. The blue box indicates the
recorded area.
ral networks for years in research in order to solve
issues such as the detection of other road users. In
the meantime, however, other components of an auto-
mated driving system, such as the modeling and pre-
diction of road user behavior, have also become data-
driven. This is necessary for an automated vehicle
to calculate a safe trajectory. Lastly, it has already
been shown that even for simple highway systems the
number of possible driving scenarios cannot be tested
conventionally. This would require more than 1.3 bil-
lion test kilometers (Winner et al., 2015). Instead, in-
telligent, scenario-based testing becomes necessary.
For the extraction, modeling and statistical analysis
of these scenarios, trajectory data are absolutely nec-
essary.
Kloeker, A., Krajewski, R. and Eckstein, L.
Comparison of Camera-Equipped Drones and Infrastructure Sensors for Creating Trajectory Datasets of Road Users.
DOI: 10.5220/0010458001610170
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 161-170
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
161

Most publicly accessible datasets available today
are devoted to perception tasks in line with the devel-
opment in the use of data-driven methods. Among
the best-known examples are KITTI (Geiger et al.,
2013) and Cityscapes (Cordts et al., 2016), which
contain annotated camera and LiDAR data. In com-
parison, trajectory datasets with a focus on automated
driving have typically appeared later and are smaller
(e.g. (Robicquet et al., 2016)). This is partly due
to the slower penetration of data-driven methods for
e.g. prediction tasks. On the other hand, the cre-
ation of trajectory datasets is usually much more com-
plex. While for perception datasets typically only sin-
gle frames or short sequences are annotated manu-
ally or semi-automatically, which is already very la-
borious, for trajectory datasets a continuous annota-
tion of all frames is essential to preserve the temporal
dimension. Since this is not possible in a meaning-
ful way manually, fully automated processing systems
are necessary.
While sensor datasets for automated driving must
almost inevitably be recorded with a vehicle-bound
sensor system, there are more possibilities when de-
signing a measuring system for trajectory data. Be-
sides the use of measurement vehicles, infrastruc-
ture sensors and drones are established alternatives.
While measurement vehicles often fuse different sen-
sor types, so far systems based on drones (e.g. (Kra-
jewski et al., 2018)) and infrastructure sensors (Col-
yar and Halkias, 2007) mainly work with cameras.
Only recently have LiDAR sensors become more ad-
vanced and more affordable, so that they are also used
in current systems (Kloeker et al., 2020). The choice
of the sensor-bearing system and the selection of the
sensors used are subject to individual advantages and
disadvantages (Krajewski et al., 2018). It is plausi-
ble, for example, that an elevated recording position
of the sensors reduces vehicle-to-vehicle occlusions.
However, a theoretical and experimental investigation
of the resulting consequences for trajectory datasets
is missing so far. Furthermore, a practical compari-
son of several methods with each other based on real
measured data in a typical recording scenario is ab-
sent.
In this publication, we would like to contribute to
closing this gap. We compare two popular approaches
to the generation of trajectory datasets. We investigate
theoretically and experimentally assumed or postu-
lated (dis-)advantages. Further, we evaluate their ac-
tual relevance for the generation of trajectory datasets.
Our main contributions are:
• We develop a prototypical camera-based measure-
ment system to generate trajectory datasets from
traffic recordings taken by a camera positioned on
a bridge
• We theoretically analyze the advantages and lim-
itations of this system compared to a drone-based
system
• We experimentally compare both systems with re-
spect to the detection statistics of non-instructed
passing traffic and a reference vehicle equipped
with a highly accurate inertial navigation system
(INS)
2 RELATED WORK
With the increasing need for datasets due to the grow-
ing popularity of data-driven approaches in the field
of automated driving, the number of approaches to
create them is growing as well. The development
started with the creation of sensor datasets for per-
ception problems, in which e.g. all dynamic road
users are annotated by bounding boxes or the static in-
frastructure is semantically segmented. Well-known
representatives are the KITTI dataset (Geiger et al.,
2013) and the Cityscapes dataset (Cordts et al., 2016).
The relevance of these datasets is not only shown by
the number of citations, but also by the competing
datasets published in the following years. However,
since usually only single points in time or very short
sequences of frames are annotated, the necessary tem-
poral context is missing, which is required e.g. for
prediction problems. An exception to these datasets
from the vehicle perspective is the Level 5 dataset
(Houston et al., 2020), which was developed espe-
cially for prediction tasks, and the Five Roundabouts
dataset (Zyner et al., 2019). However, these datasets
do not consist of manual annotations, but of auto-
mated detections based on a sensor fusion of camera
and LiDAR data or only LiDAR data. Due to the per-
spective and occlusions, significant errors are present
in the detections, so that the prediction task cannot be
considered separately from the characteristics of the
used sensor technology.
More common are therefore approaches based on
the use of permanently installed infrastructure sensors
and drones hovering above the traffic. The first dataset
published from the drone perspective is the Stanford
Drone Dataset (Robicquet et al., 2016), which fo-
cuses on traffic participants on a university campus.
While this dataset is still based on classical tracking
approaches, the datasets published later use a more
complex processing pipeline. For the creation of
the highD dataset (Krajewski et al., 2018) the video
recordings were stabilized, all road users were de-
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
162

tected by neural networks, and trajectories were ex-
tracted by a tracking algorithm and RTS smoother
(Rauch et al., 1965). Other datasets like the inD
dataset (Bock et al., 2020), rounD dataset (Krajew-
ski et al., 2020), INTERACTION dataset (Zhan et al.,
2019) or TOPVIEW dataset (Yang et al., 2019) all use
a very similar pipeline, but focus on different traffic
scenarios. In (Kruber et al., 2020) the measurement
accuracy of drone-based systems is investigated using
a reference vehicle equipped with an inertial naviga-
tion system.
In addition to the ability to fly dynamically at var-
ious locations and to detect the behavior of road users
unnoticeably, the drone has a distinct advantage over
other approaches. Due to the bird’s eye view, there
are almost no vehicle-vehicle occlusions if the drone
is correctly positioned so that a global image of the
traffic is obtained. Further, the vehicles have to be
tracked in 2D only. In order to exploit this potential,
however, a high-resolution camera, precise video sta-
bilization and deep-learning-based tracking systems
are required.
Infrastructure sensors are usually used in the form
of an intelligent transportation system station (ITS-
S). Typically an elevated positioning is used for the
sensors to gain perspective advantages. The percep-
tion of existing datasets consists mostly of single or
fused cameras. While for some datasets single cam-
eras were used, the fusion of several cameras allows
to observe a greater area. For the NGSIM (Colyar
and Halkias, 2007) and Ko-PER (Strigel et al., 2014)
datasets, cameras were positioned on infrastructure
elements, like buildings and lamp posts, to observe
a highway section or a full intersection. Similar to
the development of algorithms for processing drone
images, these older systems are based on more clas-
sical approaches and work on lower-resolution cam-
era images. In contrast, current approaches such as
the INTERACTION dataset (Zhan et al., 2019) use
high-resolution cameras and neural networks to pre-
cisely detect road users. At the same time, there are
also research projects that cover intersections or large
sections of highways on a camera-based basis but do
not provide data (AIM (Schnieder et al., 2013), Test
Field Lower Saxony (K
¨
oster et al., 2018)). Recently
it has also become feasible to additionally equip the
ITS-Ss with highly accurate LiDAR sensors to further
improve the detection accuracy (Kloeker et al., 2020).
The main advantage of ITS-Ss is their high effi-
ciency, once they are installed. Unlike a drone, which
in the best case can only record up to one hour at a
time, ITS-Ss theoretically allow unlimited recording
times. However, this is at the expense of the lack
of flexibility. A disadvantage associated with ITS-Ss
compared to a drone is the perspective causing occlu-
sions and degrading tracking accuracy with increas-
ing distance from the sensors. To handle these prob-
lems, in most cases, multiple types of sensors also po-
sitioned at different locations are combined (Kloeker
et al., 2020; Kr
¨
ammer et al., 2019).
So far, there exists no comparison between drones
and stationary camera sensors on real, synchronous
measurements. For the INTERACTION dataset, a
simulative quality evaluation was performed for a sta-
tionary camera, but no real tests (Zhan et al., 2019).
The DLRAD dataset (Kurz et al., 2018) provides data
from an aerial perspective recorded with a helicopter
but neither an evaluation nor the dataset is released.
Within the Providentia test site, reference measure-
ments were also generated with a helicopter, but were
considered as ground truth for evaluating the infras-
tructure (Kr
¨
ammer et al., 2019). No comparison was
made between the two approaches.
3 METHOD
We propose a comparison of both fundamental ap-
proaches under optimal conditions. These include the
weather, lighting, visibility and infrastructure-caused
occlusions. For the comparison, we perform joint
recordings with a drone-based system as well as with
a prototypical single-camera-sensor-based ITS-S (see
Fig. 1). While we use exactly the drone and process-
ing system also used for the creation of the highD
dataset (Krajewski et al., 2018) for the processing of
the videos from the bird’s eye view, we create a sepa-
rate system for the processing of infrastructure-based
recordings. Both approaches can theoretically be ex-
tended without limitations by using any number of
drones or sensors. For a fair comparison, we use only
a single sensor for each system and try to create as
equal conditions as possible. Both systems use a sin-
gle high-resolution 4K camera that records traffic at
25 FPS. Further, the hardware costs and effort dur-
ing the recording process are comparable. As a result,
we get a fundamental comparison of the two perspec-
tives.
For a comprehensive comparison, we suggest
three steps, one of which is theoretical while the other
two are experimental. In the first step, an analy-
sis of the presented systems will be used to derive
the theoretically achievable quality and limitations of
both approaches, taking into account the individual
components. The other two steps verify these find-
ings by practical experiments. In the second step,
the detection statistics of random traffic in the con-
sidered road section will be evaluated. However, as
Comparison of Camera-Equipped Drones and Infrastructure Sensors for Creating Trajectory Datasets of Road Users
163

Figure 2: Photo of the recording setup. The camera is posi-
tioned on a tripod on a bridge and records the passing traffic
from behind.
for this non-instructed traffic no ground truth is avail-
able, the positioning accuracy of the detections can
not be evaluated. Therefore, an additional reference
vehicle performs various maneuvers in the field-of-
view of both recording systems. This reference ve-
hicle is equipped with a high-accuracy inertial navi-
gation system whose acquired trajectories serve for a
comparison.
The remaining chapters are structured as fol-
lows: Chapter 4 describes the implementation of the
infrastructure-based system. In chapter 5 an analyt-
ical identification and comparison of the limitations
of relevant parameters for the quality of the resulting
datasets follows. The experiments in chapter 6 exam-
ine on the one hand the detection rates of both sys-
tems for non-instructed road users and on the other
hand the positioning accuracy of a reference vehicle
in both recordings.
4 CAMERA-BASED
INFRASTRUCTURE SENSOR
SYSTEM
The recording of traffic participants and the con-
version to trajectories is a procedure that, like the
processing of drone-based traffic recordings, is per-
formed in several disjunctive steps. Also, the process-
ing of the recordings is not performed live during the
recording.
For the recordings themselves a Sony Alpha 6300
with an 18 mm lens is used. The camera can record
videos in 4K resolution at 25 FPS and is positioned
on a tripod on a bridge as shown in Fig. 2. Thus, the
camera is located at a height of about 8.5 m above the
road. The camera films the traffic in portrait format
and is slightly angled so that the captured two-lane
road section covers as large an area of the camera im-
age as possible. The shots are limited to one of the
two driving directions because the middle shoulder is
full of trees blocking the view of the other lane. An in-
trinsic calibration of the camera minimizes distortions
caused by the imperfections of the recording device.
The first processing step is the detection of all
traffic participants in each frame of the recordings.
The state of the art has shown that neural networks
are suitable for this purpose. Since road users often
partially or completely overlap each other from the
chosen perspective, e.g. a simple semantic segmen-
tation is not sufficient. Instead, instance segmenta-
tion is necessary, so that we use a Mask-RCNN (He
et al., 2017) network in accordance with the literature.
Although a Mask-RCNN pre-trained on COCO (Lin
et al., 2014) was already able to detect some vehicles
correctly, we have fine-tuned the network using our
own training dataset. While public datasets as DE-
TRAC (Wen et al., 2020) were available, we needed a
dataset including instance segmentations for achiev-
ing the highest quality. The resulting network is able
to detect even partially covered vehicles at greater dis-
tances, as shown in Fig. 3.
The detection of the vehicles in the camera image
does not yet allow to determine their trajectories on
the 2D road surface. Beforehand, the position of the
vehicle on the road must be deduced from the position
of the detection in the image by a perspective map-
ping. While from the drone perspective only the per-
spective distortion caused by the three-dimensional
vehicle shape has to be considered, the camera per-
Figure 3: Examplary zoomed-in result of the Mask-RCNN
network fine-tuned on our use-case. The results show that
even partially occluded vehicles are typically detected.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
164

0 m 10 m 20 m 30 m 40 m 50 m
60 m
y
x
0 m
10 m
20 m
30 m
60 m
Figure 4: Visualization of the image mapping. While in the left image an original, untransformed frame is shown, the right
image shows the mapped result. The red line indicating the distances to the camera shows that the perspective is removed
from the mapped image. However, with increasing distance, the resolution decreases.
spective from the infrastructure sensors has to be con-
sidered here as well. Since the vehicle height has little
relevance for a trajectory dataset and the considered
road section can be assumed to be almost horizontal,
an omission of the third dimension is possible. To de-
termine the mapping, salient points in the camera im-
age and in an orthophoto are matched. The mapping
not only corrects the perspective but also converts pix-
els into meters. In Fig. 4, this is done exemplary for
a camera image, although only the detections them-
selves have to be mapped. The length and width of
each vehicle are measured when entering the image
since this is where the least perspective distortion is
present (compare Fig. 5). To determine the width of
the detected vehicles at this point, only the lower part
of the vehicles’ detections close to the road is trans-
Figure 5: Visualization of the size estimation for the
infrastructure-based system. A vehicle entering the
recorded area is shown. The estimated size is visualized
as yellow bounding box.
formed in order to avoid perspective errors. However,
for length measurement, the entire detection is trans-
formed for cars. As the perspective distortion at be-
ginning of the recorded road section is still not negli-
gible for trucks, a length modification factor of 0.71
is applied when transforming the trucks’ detections.
This factor is derived from multiple manual measure-
ments.
In a last step, the mapped detections in the indi-
vidual frames must be linked to trajectories. This
is done by the Hungarian algorithm (Kuhn, 1955),
which is used for the optimal assignment of detec-
tions to tracks based on their distances in each frame.
To smooth the positions in the last step and also to
derive the velocities and accelerations from the posi-
tions an RTS smoother (Rauch et al., 1965) is used.
5 THEORETICAL COMPARISON
Before conducting the experiments, we want to derive
theoretically which parameters and variables for the
two approaches considered represent the typical bot-
tlenecks with respect to the resulting dataset quality.
For this purpose, we consider the individual process-
ing steps and derive the expected accuracies or errors
for each detection and resulting trajectory at the end.
Since especially errors at the beginning of the pro-
cessing chain are carried through all subsequent pro-
cessing steps, we focus on them here. As the tracking
module at the end can be designed from very simple
to very complex, and must ultimately correct previ-
ous errors, we will consider this module only superfi-
cially.
Comparison of Camera-Equipped Drones and Infrastructure Sensors for Creating Trajectory Datasets of Road Users
165
0 50 100
x [m]
0.0
0.2
0.4
0.6
GSD [m]
ITS-S
Drone
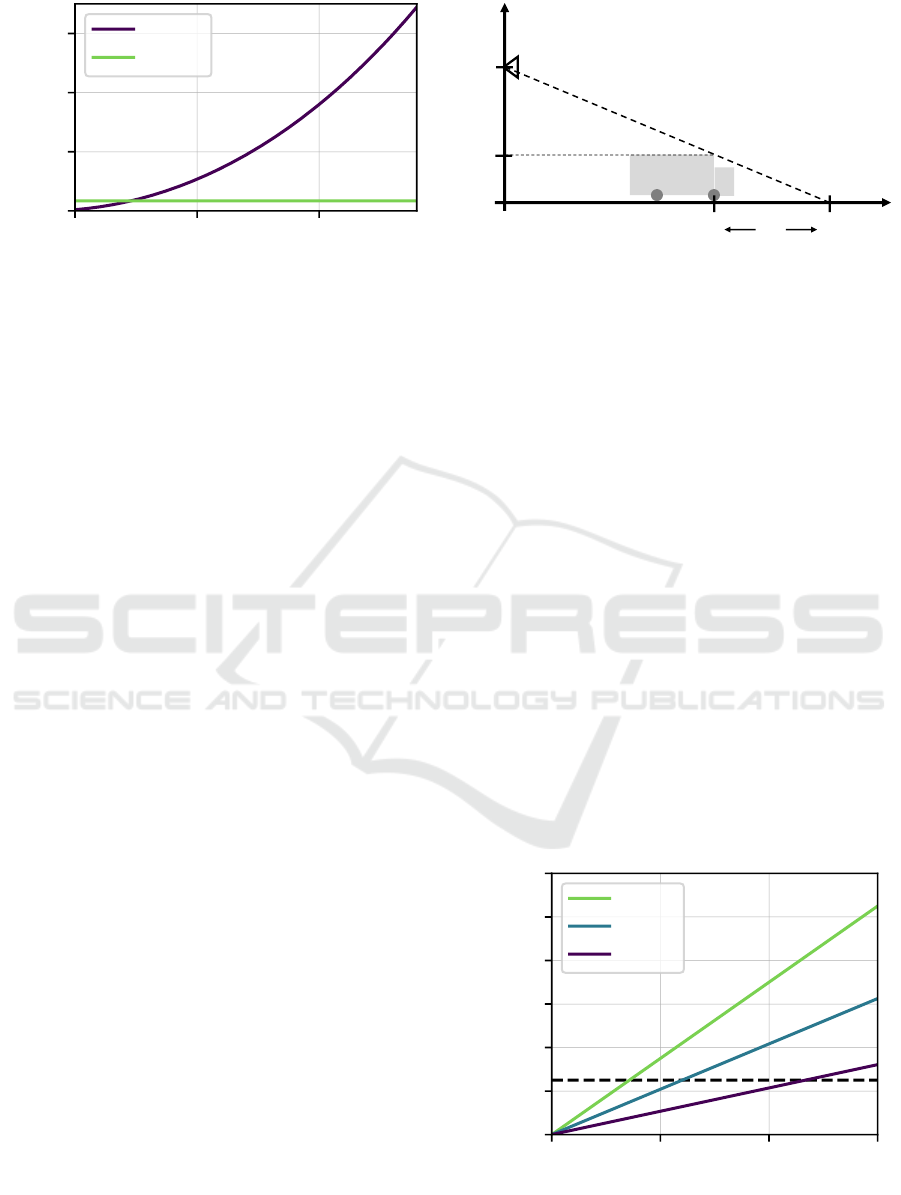
Figure 6: Comparison of the ground sampling dis-
tances (GSDs) between the drone-based (green) and the
infrastructure-based (violet) system.
Starting with the camera image itself, an elementary
difference becomes clear. The bird’s-eye view cap-
tures the entire road section under consideration with
a constant resolution or ground sampling distance
(GSD). At an altitude of 100 m a road section of up
to 140 m length is recorded with a ground sampling
distance of 3.4 cm/px at C4K resolution. In compar-
ison, the GSD for the stationary camera behaves ap-
proximately square from 0.005 m/px to 0.7 m/px at
the end of the image. As shown in Fig. 6, from 22 m
distance, the GSD is higher than for the drone. From
100 m distance, it is already 0.35 m/px.
The quality of the images themselves may also be
reduced by lens distortion and blurring. However,
we consider these errors to be negligible if the cam-
era has been calibrated correctly, and the exposure
time and aperture have been selected so that static and
dynamic content is sharply projected. With a shutter
speed of 1/500 s, from a bird’s eye view, the motion
blur of a vehicle with 70 km/h is only 0.04 m, which
is within the tolerance range of the GSD. From the
viewpoint of the stationary camera, the motion blur in
the close range is higher at the same exposure time,
but from about 20 m on it is significantly smaller than
the GSD.
The final recording-specific point are camera
movements. While the stationary camera is capturing
a fixed street segment during a recording, the drone is
constantly moving slightly. These unavoidable move-
ments are caused, for example, by wind and too im-
precise sensors used to stabilize the hovering position.
This leads to a shift of the captured road section by up
to a few meters during a recording, which can be cor-
rected by the drone pilot. Further, the state of the art
has shown that resulting position errors of extracted
road users can be virtually eliminated by video stabi-
lization (Krajewski et al., 2018).
A theoretical comparison of the quality of the ob-
ject detection is difficult. For both perspectives, a
h
c
h
t
x
o
x
t
Δx
x
h
Figure 7: Extent of vehicle-vehicle occlusions ∆x in a
camera-based ITS-S as a function of camera height h
c
, ve-
hicle distance x
t
, and vehicle height h
t
.
large repertoire of algorithms can be used. There-
fore the accuracy depends more on the amount of
annotations and the available computing time. A
non-quantifiable difference, however, is that from the
drone perspective the objects to be detected are of a
very similar size. On the other hand, in ITS-S-based
images, very large to very small, as well as partially
occluded objects must be detected.
Vehicle-vehicle Occlusions play an important
role in the detection process. Here, the drone has a
clear advantage, because if the drone is correctly posi-
tioned near or above the road, masking between vehi-
cles can be completely prevented. From the perspec-
tive of the stationary camera, however, occlusions
cannot be excluded. The extent of the occlusions de-
pends on the height of the camera, the vehicles and
the distances, as shown in Fig. 7. The occluded dis-
tance can be derived as ∆x = (h
t
· x
t
)/(h
c
− h
t
). As
depicted in Fig. 8, especially for vans and trucks (par-
tial) occlusions have to be expected assuming a fol-
lowing distance of 25 m at 70 km/h.
0 50 100 150
x
t
[m]
0
20
40
60
80
100
120
∆x [m]
Truck
Van
Car
Figure 8: Occluded distance ∆x over vehicle distance x
t
for
a camera mounted at h
c
= 8m. Results for car (violet, h
t
=
1.5m), van (blue, h
t
= 2.5 m) and truck (green, h
t
= 3.5 m).
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
166

From the object detections both the object size
and the center to be tracked must be derived. Due
to the perspective, the stationary camera has clear ad-
vantages in estimating the vehicle height compared
to the drone. On the other hand, the vehicle length
can only be determined much less accurately as it en-
ters the image. Especially high trucks cover their own
driver’s cab (compare Fig. 4). From the drone per-
spective, the vehicle length and width can be deter-
mined most easily in the center of the image, since
the sides of the vehicle are hardly visible here. Ac-
cordingly, it makes sense to directly track the center
point as well as the orientation of road users from a
drone perspective, since no additional error is gener-
ated. From the bridge perspective, however, the ori-
entation cannot be estimated with the approach shown
and the object center can only be tracked indirectly
via the rear axle.
The GSD again plays a central role in the georef-
erencing of the detections. While drone images with
a GSD of 3.4 cm/px have a higher resolution than
orthophotos, the increasing GSD of stationary cam-
eras makes the georeferencing of pixels at greater dis-
tances more difficult.
6 EXPERIMENTS
The two sensor systems are evaluated in two exper-
iments. At first, we compare the general detection
statistics in order to obtain a general assessment of
the quality of both systems. This is done by analyz-
ing the tracks of all detected non-instructed road users
on properties that don’t require a ground truth since
no independent reference measurement is given for
those. In the second step, the localization accuracy of
both systems is tested against a reference vehicle with
an inertial navigation system.
In order to tempo-spatial synchronize all systems,
optical features were used for the drone and ITS-S.
While for the temporal synchronization the passing
of vehicle rears at unique keypoints was used, the
spatial synchronization was done by georeferencing
the recordings to an orthophoto in UTM coordinates.
Then, the recordings of the reference vehicle were
synchronized to the drone recordings by matching the
generated tracks and minimizing the error of all cen-
troids at all timesteps. A further spatial synchroniza-
tion was not necessary, since the INS of the reference
vehicle already outputs its position in UTM coordi-
nates. All synchronization steps were manually veri-
fied.
0 100 200
Distance [m]
−2
0
2
Offset [m]
Figure 9: Example ITS-S measurements of a vehicles’ x-
position offset to the filtered position. The vehicle was driv-
ing at a nearly constant speed. The dashed lines indicate the
theoretical maximal accuracy a vehicle can be detected at
that distance (GSD).
6.1 Detection Statistics
In the chosen recording setup, the ITS-S’s field of
view covered a road section of about 400 m. This sec-
tion length can also be covered by a drone, as shown
for the highD dataset (Krajewski et al., 2018). How-
ever, due to regulations, the flight altitude was limited
to 100 m at the chosen recording site. As this reduced
the covered road section length to 140 m, we use only
this distance for comparison of both systems. For all
recordings, the drone was positioned to capture the
nearest 140 m to the ITS-S.
We recorded a total of 35 minutes on a sunny day.
During the recordings, 452 vehicles passed the mea-
surement sector. Both systems managed to initially
detect all of them. The tracks generated by the drone
recordings have an average length of 134.3 m. Con-
sidering that tracking only starts as soon as a vehi-
cle is completely visible in the image, the maximum
possible tracking distance is thus slightly smaller than
the recorded length of the road of about 140 m. This
means that (almost) all vehicles are tracked over the
entire distance. Similarly, the average track length
generated by the ITS-S recordings is 135.5 m, con-
sidering only the first 140 m of the recorded road sec-
tion. Therefore, both approaches are able to reliably
track road users over 140 m. However, if the entire
road section visible to the ITS-S (400 m) is consid-
ered, the average track length is only 263.3 m. A
more detailed analysis of the tracks shows, that the
system often fails to detect vehicles at a greater dis-
tance from the camera. There are mainly two reasons
for this. Firstly, as seen in Fig. 6, the ground sampling
distance deteriorates quadratically with the distance.
Thereby the variance of the detections also increases
with the distance (see Fig. 9). If the variance turns
too great, the Hungarian algorithm may not be able
Comparison of Camera-Equipped Drones and Infrastructure Sensors for Creating Trajectory Datasets of Road Users
167
to correctly assign the detections to the correspond-
ing tracks. This leads ultimately to an end of the af-
fected track if this happens too often in consecutive
time steps. Secondly, about 21.5 % of the vehicles
are at least for one frame occluded by another vehi-
cle in the considered road segment. The chance for
this to happen rises with the distance to the camera as
seen in Fig. 7. Fully occluded vehicles can no longer
be detected and therefore no longer be tracked. In
contrast, a higher flight altitude of the drone and thus
a larger area covered increases the ground sampling
distance, but not to a lower detection rate. The highD
dataset (Krajewski et al., 2018) shows that vehicles
are reliably detected even at significantly higher flight
altitudes.
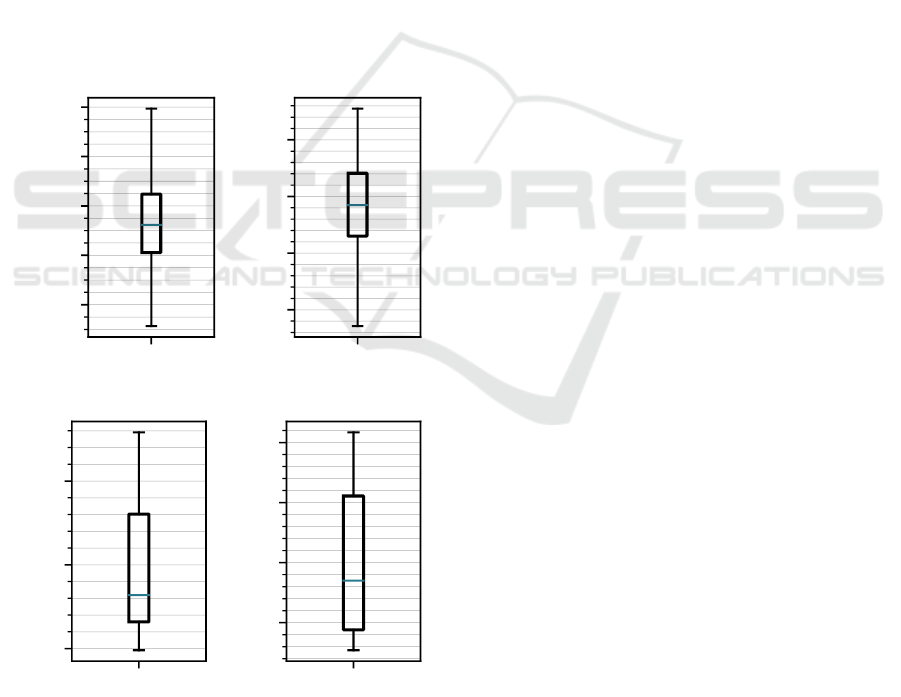
Fig. 10 shows a comparison of the vehicle dimen-
sions, separated by the two detected classes. For cars,
the measured widths match to a great extent, with
a median deviation of only 1.5 cm. This indicates,
that both systems are able to accurately estimate this
value. Considering the length, the cars are typically
Length
−0.2
0.0
0.2
0.4
0.6
Deviation [m]
Width
−0.2
−0.1
0.0
0.1
(a) Car.
Length
0.0
0.5
1.0
Deviation [m]
Width
−0.1
0.0
0.1
0.2
(b) Truck.
Figure 10: Statistical evaluation of the measured dimension
differences between both systems. For each vehicle, the cal-
culated dimensions by the two approaches were subtracted.
A positive value indicates a higher value measured by the
ITS-S.
measured a bit too long by the ITS-S, with a median
deviation of about 12.5 cm. The main factor is pre-
sumably the diversely shaped car fronts, which can
distort the transformed detections of the ITS-S. For
systems, which measure the vehicles not only from
the back but also from different perspectives, this er-
ror could be eliminated.
The measured widths of trucks differ at a median
of about 0.03 cm. Since the ITS-S is recording vehi-
cles from behind, it is able to precisely determine the
trucks’ width. In case of the drone, perspective dis-
tortions of tall vehicles have to be considered. The
system we used is able to compensate for this effect
by assuming an average truck height of 3.50 m. Over-
all, the small deviations suggest that both systems can
reliably measure the width of trucks. Regarding the
length measurement, the ITS-S is only able to esti-
mate the length of the trucks (see section 4). This
leads to significant deviations in the measurements of
the truck lengths. Due to the diverse truck shapes that
occur, it is not possible to completely eliminate this
effect.
6.2 Localization Accuracy
During the recordings, we passed the measurement
sector eight times with our reference vehicle. To in-
clude lateral movements, we performed a lane change
to simulate different scenarios in four of these passes.
Independently from that, we accelerated the vehicle in
three passes to incorporate the effect of varying speed
on the tracking into the evaluation. From the ITS-S
perspective, the vehicle became partially occluded in
two of those passes.
Fig. 11 shows an exemplary trajectory compari-
son of one pass. It is immediately noticeable that the
trajectory of the reference vehicle shows a deviation
from the other two trajectories. Our experiments have
shown that this is caused by a GPS drift perpendicu-
lar to the direction of motion, resulting from an erro-
neous GPS fix after passing under a bridge. This drift
is not deterministic and couldn’t be compensated by
the differential GPS signal for our measurements, but
it averages to about 30 cm and is constant over the en-
tire course of a measurement. Apart from this, the
accuracy of the inertial navigation system is 1-2 cm
and thus maps the course of the trajectory with high
precision.
Analyzing the deviations of the drone and ITS-S
measurements over the distance results in the curves
shown in Fig. 12. As expected, the deviation of the
drone tracks is almost constant over the entire mea-
surement distance and varies in a range of only 2 cm,
which is consistent with the theoretically determined
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
168
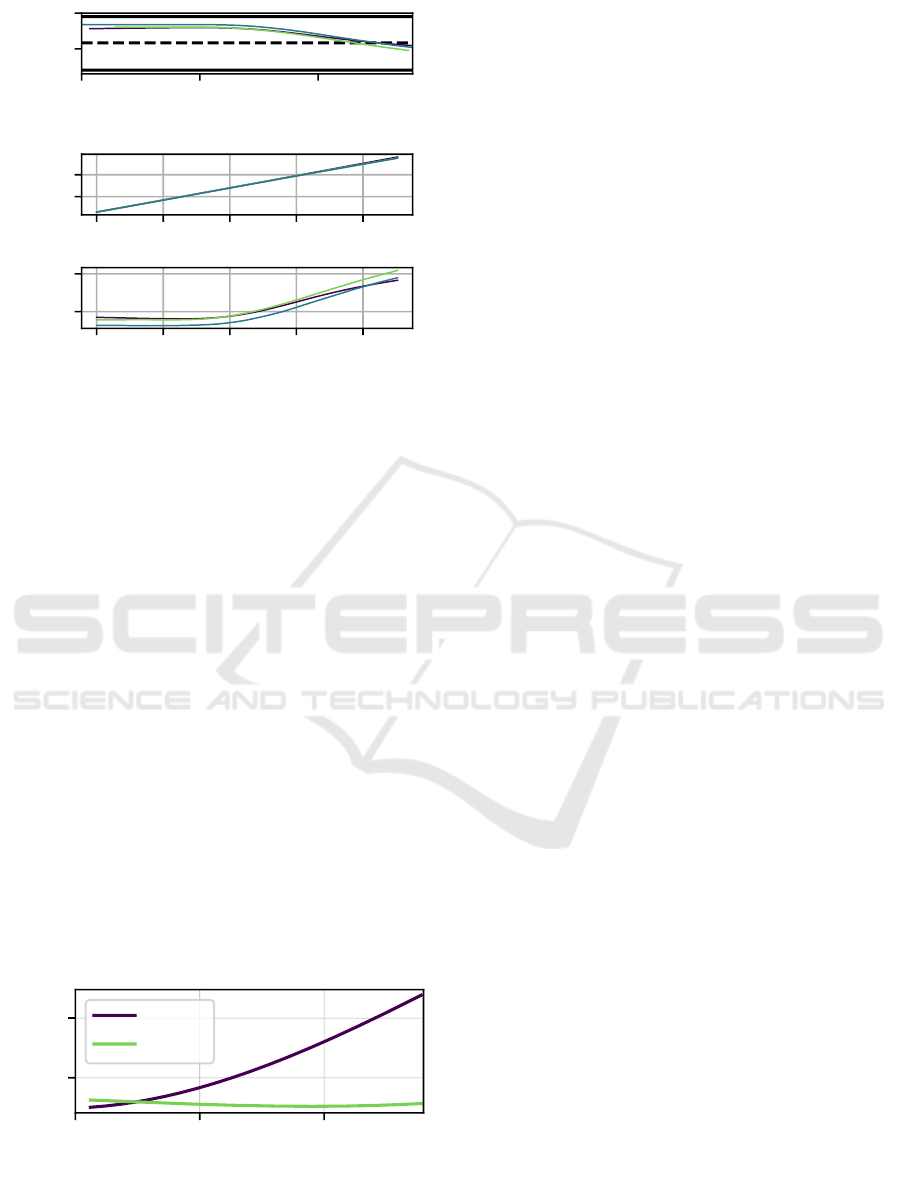
0 50 100
x [m]
0
5
y [m]
0 1 2 3 4
50
100
x [m]
0 1 2 3 4
t [s]
2.5
5.0
y [m]
Figure 11: Exemplary trajectory comparison of the refer-
ence vehicle. The top graph shows the trajectories of the
ITS-S (violet), drone (green) and reference vehicle (blue)
from a bird’s-eye perspective. The two graphs below show
the positions in x- respectively y-direction over the time
where all three methods tracked the vehicle. The reference
vehicle became occluded from the ITS-S perspective after
around two seconds, which leads to a visible deviation in
the y-direction.
GSD. The minimum deviation for both measurement
methods is about 30 cm. This corresponds approxi-
mately to the value which we have determined as the
average GPS drift. Assuming an error-free reference
measurement, the minimum deviation would be re-
duced by the amount of the GPS drift, which results in
a convincing tracking performance by the drone over
the entire road section.
The ITS-S measurements also show the char-
acteristics as expected in chapter 5, but the abso-
lute degradation of the accuracy is significantly lower
than that of the GSD. This can be explained by
the Kalman filtering of the measurements during the
tracking, which results in an acceptable accuracy even
at greater distances. Compared to the drone, the ITS-
S achieves comparable or even better accuracy up to
0 50 100
x [m]
0.4
0.6
Deviation [m]
ITS-S
Drone
Figure 12: Averaged deviation from the reference measure-
ments. Due to the low sample size the curves are slightly
smoothed to compensate for the measurement variances.
a distance of 30 m. However, at longer distances, the
accuracy of the ITS-S can no longer keep up with the
drone due to the perspective.
7 CONCLUSION
In this paper, we have presented a comparison be-
tween two typical approaches to the creation of trajec-
tory datasets of road users. The analysis of the state
of the art has shown that trajectory datasets have an
increasing relevance for automated driving. The two
common approaches to create high-quality datasets
are the use of ITS-Ss and drones. However, there is
no concrete qualitative or quantitative comparison of
both methods in the literature so far. Therefore, we
have developed a camera-based infrastructure system
for the detection of road users from elevated positions
in accordance with the state of the art in order to com-
pare it with an existing drone approach. The theo-
retical analysis has shown that the biggest influence
on quality is the perspective as well as the ground
sampling distance. Within the experiments, we could
confirm these results. Both systems were able to reli-
ably track vehicles over a course of 140 m. Consid-
ering greater distances though, the ITS-S struggled
due to vehicle-to-vehicle occlusions. Experiments
with a reference vehicle have shown that the position-
ing accuracy near the infrastructure system is at the
same level as the drone system, but decreases gradu-
ally from a distance of 30 m. In summary, we have
theoretically and experimentally shown that both ap-
proaches are able to detect all road users, although
drone-based systems have an advantage regarding the
distance independent road user localization accuracy.
ACKNOWLEDGEMENTS
The research leading to these results is further funded
by the Federal Ministry of Transport and Digital In-
frastructure (BMVI) within the project ”ACCorD:
Corridor for New Mobility Aachen - D
¨
usseldorf”
(FKZ 01MM19001). The authors would like to thank
the consortium for the successful cooperation.
REFERENCES
Bock, J., Krajewski, R., Moers, T., Runde, S., Vater, L.,
and Eckstein, L. (2020). The ind dataset: A drone
dataset of naturalistic road user trajectories at german
intersections. In IEEE Intelligent Vehicles Symposium
(IVS).
Comparison of Camera-Equipped Drones and Infrastructure Sensors for Creating Trajectory Datasets of Road Users
169

Colyar, J. and Halkias, J. (2007). Us highway 101 dataset.
Federal Highway Administration (FHWA), Tech. Rep.
FHWA-HRT-07-030.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In Proc. of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. International
Journal of Robotics Research (IJRR), 32(11).
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
Houston, J., Zuidhof, G., Bergamini, L., Ye, Y., Jain, A.,
Omari, S., Iglovikov, V., and Ondruska, P. (2020). One
thousand and one hours: Self-driving motion predic-
tion dataset.
Kloeker, L., Kloeker, A., Thomsen, F., Erraji, A., and Eck-
stein, L. (2020). Traffic detection using modular in-
frastructure sensors as a data basis for highly auto-
mated and connected driving. 29. Aachen Colloquium
- Sustainable Mobility, 29(2):1835–1844.
K
¨
oster, F., Mazzega, J., and Knake-Langhorst, S. (2018).
Automatisierte und vernetzte systeme effizient erprobt
und evaluiert. ATZextra, 23:26–29.
Krajewski, R., Bock, J., Kloeker, L., and Eckstein, L.
(2018). The highd dataset: A drone dataset of natural-
istic vehicle trajectories on german highways for val-
idation of highly automated driving systems. In 2018
21st International Conference on Intelligent Trans-
portation Systems (ITSC), pages 2118–2125.
Krajewski, R., Moers, T., Bock, J., Vater, L., and Lutz,
E. (2020). The round dataset: A drone dataset of
road user trajectories at roundabouts in germany. In
IEEE Intelligent Transportation Systems Conference
(ITSC).
Kr
¨
ammer, A., Sch
¨
oller, C., Gulati, D., Lakshminarasimhan,
V., Kurz, F., Rosenbaum, D., Lenz, C., and Knoll, A.
(2019). Providentia - a large-scale sensor system for
the assistance of autonomous vehicles and its evalua-
tion.
Kruber, F., Morales, E. S., Chakraborty, S., and Botsch, M.
(2020). Vehicle position estimation with aerial im-
agery from unmanned aerial vehicles. IEEE Intelli-
gent Vehicles Symposium IVS 2020.
Kuhn, H. W. (1955). The hungarian method for the assign-
ment problem. Naval Research Logistics Quarterly,
2:83–97.
Kurz, F., Waigand, D., Fouopi, P. P., Vig, E., Henry, C.,
Merkle, N., Rosenbaum, D., Gstaiger, V., Azimi,
S., Auer, S., Reinartz, P., and Knake-Langhorst, S.
(2018). Dlrad - a first look on the new vision and map-
ping benchmark dataset. In ISPRS TC 1 Symposium,
pages 1–6.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Doll
´
ar, P., and Zitnick, C. L. (2014). Mi-
crosoft coco: Common objects in context. In Fleet,
D., Pajdla, T., Schiele, B., and Tuytelaars, T., edi-
tors, Computer Vision – ECCV 2014, pages 740–755,
Cham. Springer International Publishing.
Rauch, H. E., Tung, F., and Striebel, C. T. (1965). Maxi-
mum likelihood estimates of linear dynamic systems.
AIAA journal, 3(8):1445–1450.
Robicquet, A., Sadeghian, A., Alahi, A., and Savarese, S.
(2016). Learning social etiquette: Human trajectory
understanding in crowded scenes. In European con-
ference on computer vision, pages 549–565.
Schnieder, L., Grippenkoven, J., Lemmer, K., Wang, W.,
and Lackhove, C. (2013). Aufbau eines forschungs-
bahn
¨
ubergangs im rahmen der anwendungsplattform
intelligente mobilit
¨
at. Signal und Draht (105), 6:25–
28.
Strigel, E., Meissner, D., Seeliger, F., Wilking, B., and Di-
etmayer, K. (2014). The ko-per intersection laser-
scanner and video dataset. In 17th International
IEEE Conference on Intelligent Transportation Sys-
tems (ITSC), pages 1900–1901.
Wen, L., Du, D., Cai, Z., Lei, Z., Chang, M.-C., Qi, H.,
Lim, J., Yang, M.-H., and Lyu, S. (2020). Ua-detrac:
A new benchmark and protocol for multi-object de-
tection and tracking. Computer Vision and Image Un-
derstanding.
Winner, H., Hakuli, S., Lotz, F., and Singer, C. (2015).
Handbuch Fahrerassistenzsysteme. Springer Vieweg,
Wiesbaden.
Yang, D., Li, L., Redmill, K., and Ozguner, U. (09.06.2019
- 12.06.2019). Top-view trajectories: A pedestrian
dataset of vehicle-crowd interaction from controlled
experiments and crowded campus. In 2019 IEEE
Intelligent Vehicles Symposium (IV), pages 899–904.
IEEE.
Zhan, W., Sun, L., Di Wang, Shi, H., Clausse, A., Nau-
mann, M., Kummerle, J., Konigshof, H., Stiller, C.,
de La Fortelle, A., et al. (2019). Interaction dataset:
An international, adversarial and cooperative motion
dataset in interactive driving scenarios with semantic
maps. arXiv preprint arXiv:1910.03088.
Zyner, A., Worrall, S., and Nebot, E. M. (2019). Acfr five
roundabouts dataset: Naturalistic driving at unsignal-
ized intersections. IEEE Intelligent Transportation
Systems Magazine, 11(4):8–18.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
170
