
Urban Traffic Incident Detection for Organic Traffic Control:
A Density-based Clustering Approach
Ingo Thomsen, Yannick Zapfe and Sven Tomforde
Intelligent Systems, Christian-Albrechts-Universit
¨
at zu Kiel, 24118 Kiel, Germany
Keywords:
Organic Traffic Control, Traffic Flow Analysis, Traffic Incident Detection, Traffic Management.
Abstract:
The traffic demands in urban road networks can fluctuate immensely. The Organic Traffic Control (OTC) of-
fers a resilient traffic management to control such traffic demands. An additional challenge is the detection of
unforeseen traffic incidents. To enhance the capabilities of OTC accordingly, we outline a traffic incident algo-
rithm based on DBSCAN, a density-based clustering algorithm: In a simulated urban road network, equipped
with traffic light controllers at intersections, vehicle detectors are used to gather traffic flow data. The cluster-
ing of this time series data to detect simulated road blockages is expanded using various filters. This extension
of the initial clustering is the result of an manual evaluation process, which shows the principal applicability
of this approach.
1 INTRODUCTION
Increasing mobility and consequential rising traffic
demands elevate traffic density on the streets, espe-
cially in urban areas. Therefore, the average travel
times for individual traffic participants can rise. As
traffic situations are in constant change at a spatial
and temporal level, traffic management solutions re-
quire mechanisms for adaptation at runtime.
The Organic Traffic Control (OTC) system (Som-
mer et al., 2016) is self-organised traffic management
system. Each intersection in a network is controlled
by an instance of the OTC, which decides locally for
each node if and how the traffic light signalisation
is to be adapted. For this, the traffic conditions are
constantly analysed, and the decision behaviour is im-
proved over time. This facilitates resilient traffic man-
agement.
In addition to the common fluctuation in traffic
demands, various traffic incidents – accidents, road
blockades, unscheduled maintenance, or construction
work – can have a severe impact on the traffic be-
haviour. To boost the adaptive capacities of the OTC
system in the context of urban road networks, inci-
dent detection capabilities are highly beneficial for
more efficient and accurate traffic management. This
paper explores the possibility to detect incidents in
urban road networks by employing a density-based
clustering algorithm (DBSCAN) (Ester et al., 1996)
for traffic incident detection. An intermediate goal is
to equip the OTC with this capability. In contrast to
state-of-the-art approaches from highways, the inci-
dent detection problem in urban areas is more com-
plex due to a more heterogeneous traffic model (e.g.,
intersections with traffic lights, more distributed traf-
fic demands, primary and secondary roads) and par-
ticipant behaviour (e.g., unloading lorries, stopping
busses). This can introduce patterns in the detector
data that are very similar to those of actual incidents.
The remainder of this paper is organised as fol-
lows: The next section provides information on the
Organic Traffic Control and traffic incidents detec-
tion. Section 3 then describes underlying assump-
tions about the traffic model under consideration. The
next two sections outline the main contribution of this
work: In Section 4 the proposed incident detection is
presented and Section 5 describes the corresponding
evaluation, which includes experimental setup, eval-
uation, and results. As an outlook, Section 6 pro-
poses the next steps towards an incident-aware self-
organised traffic control behaviour based on OTC. Fi-
nally, Section 7 summarises the paper.
2 BACKGROUND
As a basis for the presented approach, this section in-
troduces the OTC system and briefly summarises the
state-of-the-art in incident detection.
152
Thomsen, I., Zapfe, Y. and Tomforde, S.
Urban Traffic Incident Detection for Organic Traffic Control: A Density-based Clustering Approach.
DOI: 10.5220/0010454101520160
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 152-160
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
2.1 Organic Traffic Control
The Organic Traffic Control (OTC) system is a traf-
fic management system, developed according to the
principles of Organic Computing (M
¨
uller-Schloer and
Tomforde, 2017). It is a self-adaptive and self-
organising (SASO) system, which distributes the
complexity of decision-making processes among au-
tonomous agents, which in turn can cooperate with
each other. Such SASO systems tackle the complex-
ity of controlling runtime behaviour by distributing
the decision-making processes among autonomous
agents, which in turn cooperate with each other:
Goals can be reached in a large system without
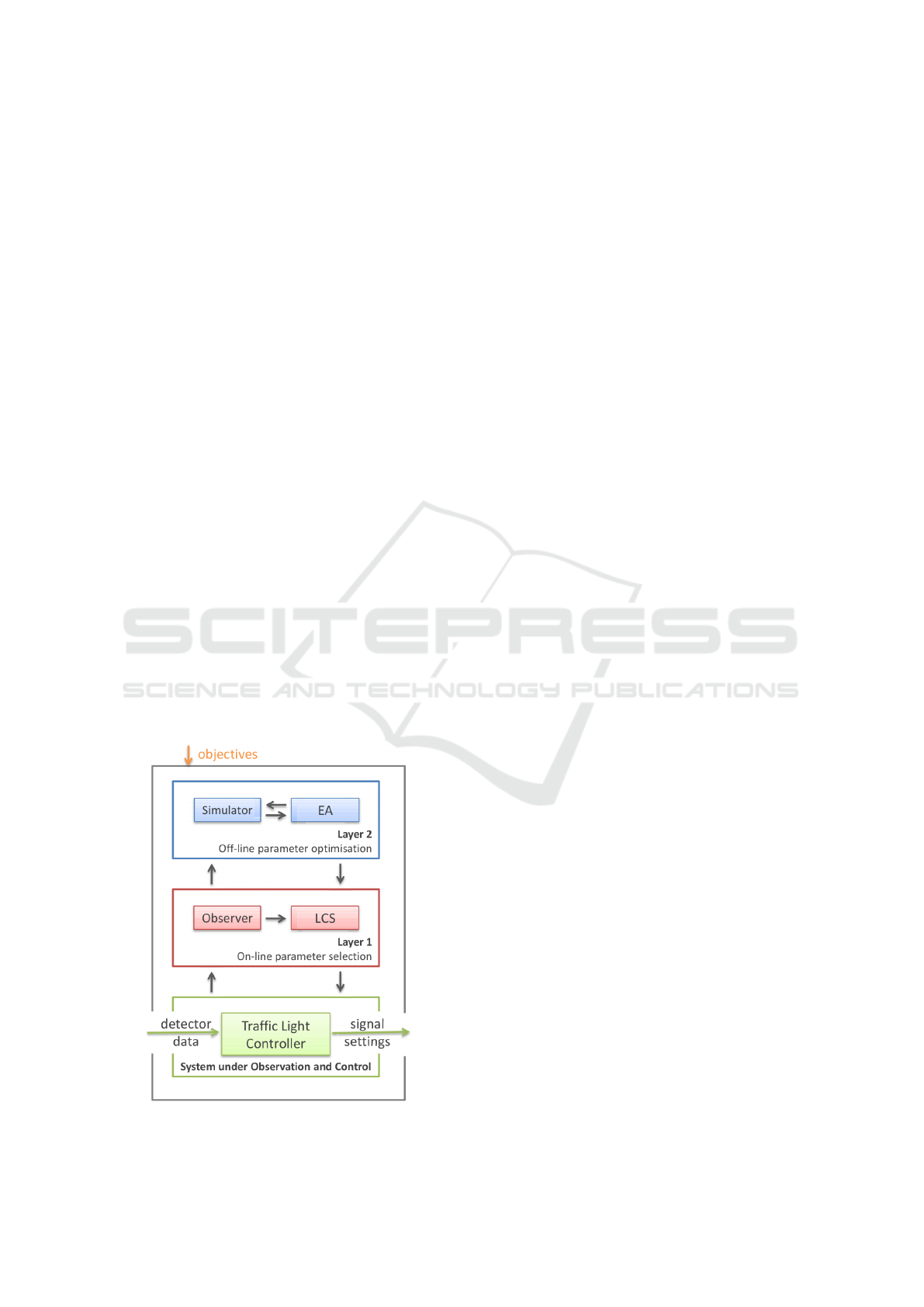
centralised ruling. It consists of a productive part
and a control mechanism, based on a multilevel ob-
server/controller architecture by (Tomforde et al.,
2011). This architecture is outlined in Figure 1 and
consists of 3 levels:
Level 0. Here, the the System under Observation
and Control (SuOC) is situated – the (simulated) traf-
fic system equipped with sensors (detector) and traf-
fic light controllers (actuator). The signal settings of
these controllers can be altered.
Level 1. This level contains an observer that pro-
cesses the sensor data from the SuOC to create a
model of the current traffic (flow) situation. This
is handed over to the Controller, which is based on
a Learning Classifier System (LCS). The controller
Figure 1: Overview of the multilevel OTC architecture.
then selects a fitting rule to alter the traffic light sig-
nalisation in the SuOC This is the “online” layer.
Level 2. This is the “offline” layer, which is acti-
vated, in case no appropriate rules can be found. It
uses an evolutionary algorithm to generate new rules
for Layer 1. These newly found rules are evaluated
using a traffic simulator (Aimsun SLU, 2020).
Each intersection is equipped with such an OTC
control module and, through interaction. additional
functionality can be provided, e.g., dynamic route
guidance (DRG) or progressive signal systems (PPS),
also known as “green waves” in traffic.
2.2 Traffic Incident Detection
Traffic control has to continuously evaluate informa-
tion about the current road situation, including traf-
fic incidents. The California Algorithm (Payne and
Tignor, 1978), the incident detection approach imple-
mented in OTC, is a decision tree algorithm based on
four states: incident-free, incident termination, ini-
tial detection, and incident continuation, all based on
occupancy values at several locations. This method
focuses mainly on highways and is not necessarily
equally adequate for urban areas, as argued by (Som-
mer et al., 2016). For further reading, (Parkany and
Xie, 2005) presents an exhaustive list of incident de-
tection methods for highways and arterial roads.
The information on the traffic flow is usually rep-
resented as time series data. A typical part of the cor-
responding preprocessing is the detection of anoma-
lies, alongside the related, but distinct novelty and
outlier detection. (Pimentel et al., 2014) describe
anomaly detection as recognising that test data differs
significantly from training data. They also outline dif-
ferent approaches, based on information theory, do-
main, reconstruction, probability, and distance. In this
context anomalies are localised traffic incidents that
deviate considerably from normal traffic behaviour
and have a significant influence on the overall net-
work performance. For instance, such incidents could
be road works or accidents (see Section 3).
Cluster analysis, the identification of groups of
similar points in (time series) data, is a common tech-
nique for statistical data analysis, with numerous al-
gorithms based on connectivity, centroids, grid, distri-
bution, and density. Such a well density-based clus-
tering algorithm, DBSCAN (Ester et al., 1996), is
used as a base for incident detection as described in
more detail in Section 4.
Urban Traffic Incident Detection for Organic Traffic Control: A Density-based Clustering Approach
153

3 MODEL ASSUMPTIONS
The approach for detecting traffic incidents described
in this paper is intended to be used in the context of
Organic Traffic Control (see Section 2.1). Therefore,
this section gives a summary of the broader underly-
ing domain model and the simulation setup.
Urban Road Networks. In contrast to highways or
arterial roads, urban road networks do not have a priv-
ileged “main road” with a dominating traffic load.
Single or multi-lane sections with speed limits con-
nect intersections, which are equipped with one traf-
fic light controller (TLC) each to operate traffic lights
at each incoming section. The signalisation phases of
the TLCs are displayed periodically based on a con-
trol cycle. The incoming and outgoing sections also
have detectors for counting vehicles (such as induc-
tion loops embedded in the street surface), thus al-
lowing to calculate the traffic flow for each section.
The network may include junctions where no roads
“intersect” and which are not controlled by a TLC.
To facilitate other OTC features (PSS or DRG), all
incoming roads of an intersection are equipped with
variable message signs (VMS) to relay information to
the drivers. Additionally, the junction controllers may
communicate with immediate neighbours.
Traffic Demand. The occurring traffic load can be
defined as an origin-destination (O/D) matrix which
defines how many vehicles traverse from each origin
to each destination per hour. An O/D matrix may also
be time-variant to model changing demands (e.g., dur-
ing a simulation).
Incidents. At this stage, a general incident model is
applied. Real-life events and their immediate effect
are represented as a full roadblock. They are located
within a section with fixed start and end times. Sec-
tion 6 suggests a prospective, more complex model.
4 DETECTION APPROACH
The intention of this work is to evaluate DBSCAN
with respect to identifying incidents based on prepro-
cessed traffic flow values. As a result of the evalu-
ation process outlined in Section 5.7, detection im-
provements (flattening and domain knowledge) were
added to this approach and are described in this sec-
tion.
4.1 DBSCAN
Density Based Spatial Clustering of Applications with
Noise (DBSCAN) (Ester et al., 1996) is an established
algorithm for clustering and anomaly detection. It is
efficient for large amounts of data and does not re-
quire domain knowledge. Also, the number of target
clusters does not have to be specified beforehand and
the clusters can be of arbitrary shape.
The key idea of DBSCAN is to form clusters of
core objects with a minimum neighbourhood density
and further objects that are connected to these cores.
The neighbourhood density is determined by the num-
ber of other objects surrounding a data object within
a given radius. Other objects that are not connected
with objects belonging to a cluster are considered as
noise. Here, the objects are the points of the traffic
flow data. With respect to a distance measure dist and
the two algorithm parameters ε and minPts, the fol-
lowing concepts are used:
ε-neighbourhood. This is the set of points N
ε
that
is located near a point p within a given radius ε:
N
ε
(p) = {p
0
| dist(p, p
0
) ≤ ε} (1)
Directly Density-reachable. All points p
0
are di-
rectly density-reachable from a point p if the follow-
ing applies:
p
0
∈ N
ε
(p) (2)
|N
ε
(p)| ≥ MinPts (3)
Density-reachable. All points p
0
are density-
reachable from a point p if a chain of points p =
p
1
,..., p
n
= p
0
exists such that p
i
and p
i+1
are directly
density-reachable for each i ∈ {1, ..., n}.
Density-connected. Two points p and p
0
are
density-connected if a point q exists from which both
are density-reachable.
Cluster. The set of points C for which applies:
∀p, p
0
: if p
0
density-reachable from p ∈ C (4)
∀p, p
0
∈ C : p is density-connected to p
0
(5)
Noise. All points that do not belong to any cluster
are categorised as Noise.
An important part of DBSCAN is the choice of
the distance measurement for determining the ε-
neighbourhood. Section 5.5 lists the measures used
for this work.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
154

(a) Control cycle starting at 0s. (b) Control cycle starting at 90s. (c) Control cycle starting at 180s.
Figure 2: Traffic flow at intersection labelled “2;1 1;1” (see Figure 3). Flattened and unflattened time series show the flows
in vehicles/hour – indicated on the y-axis – for the second 45s of each of the first three control cycles at the beginning of a
simulation. Blue curve: no flattening; yellow: flattening weight of 66 %; purple: 50 %; green: 33 %.
4.2 Flattening
The raw detector values are preprocessed to form time
series of flow values – one data point per section and
control cycle. In addition, the time series are flattened
(dampened) using a weighted average. Here, previ-
ous traffic flows are taken into account with more re-
cent values having more influence. The weight w is
the only parameter, denoting the percentage of a data
point in the weighted average. For a flow value time
series x
s
t
in section s at the starting time t with a con-
trol cycle duration t
c
, the flattening f is calculated re-
cursively:
f (x
s
t
) =
(
x
s
t
if t = 0
x
s
t
∗
w
100
+ (1 −
w
100
) ∗ f (x
s
t−t
c
) otherwise
(6)
For instance, Figure 2 shows the time series of
three cycles at the beginning of a simulation in the 2x2
Manhattan grid (see Section 5.1) for several weights:
For the first cycle, there is no “previous” data, so the
flattened times series are the same. This is then taken
into calculation for the second cycle and flattens the
time series accordingly. In the last chart, both previ-
ous time series are integrated into the weighted aver-
age. E.g., for the flattening weight of 50, the current
time series is accountable for 50 % of the weighted
average; the previous time series for 50 % of the re-
maining 50, resulting in a 25 % share for the first time
series. It shows the intended effect of flattening the
curve: Smaller and fewer spikes.
4.3 Domain Knowledge
The integration of knowledge about the model can
help to improve the detection. It can be applied for
initial detection (to increase the detection rate) or vali-
dation (to reduce the false positives). During the eval-
uation process described in Section 5.7, several ob-
servations about the traffic networks, demands, and
incidents were utilised.
5 EVALUATION
To assess the performance of the incident detection
conceived in Section 4, the algorithm was executed
using varying parameter sets on traffic flow data ob-
tained from traffic simulations. This section describes
the experimental setup with respect to the model from
Section 3 followed by the initial algorithm parameters
and a description of the evaluation process.
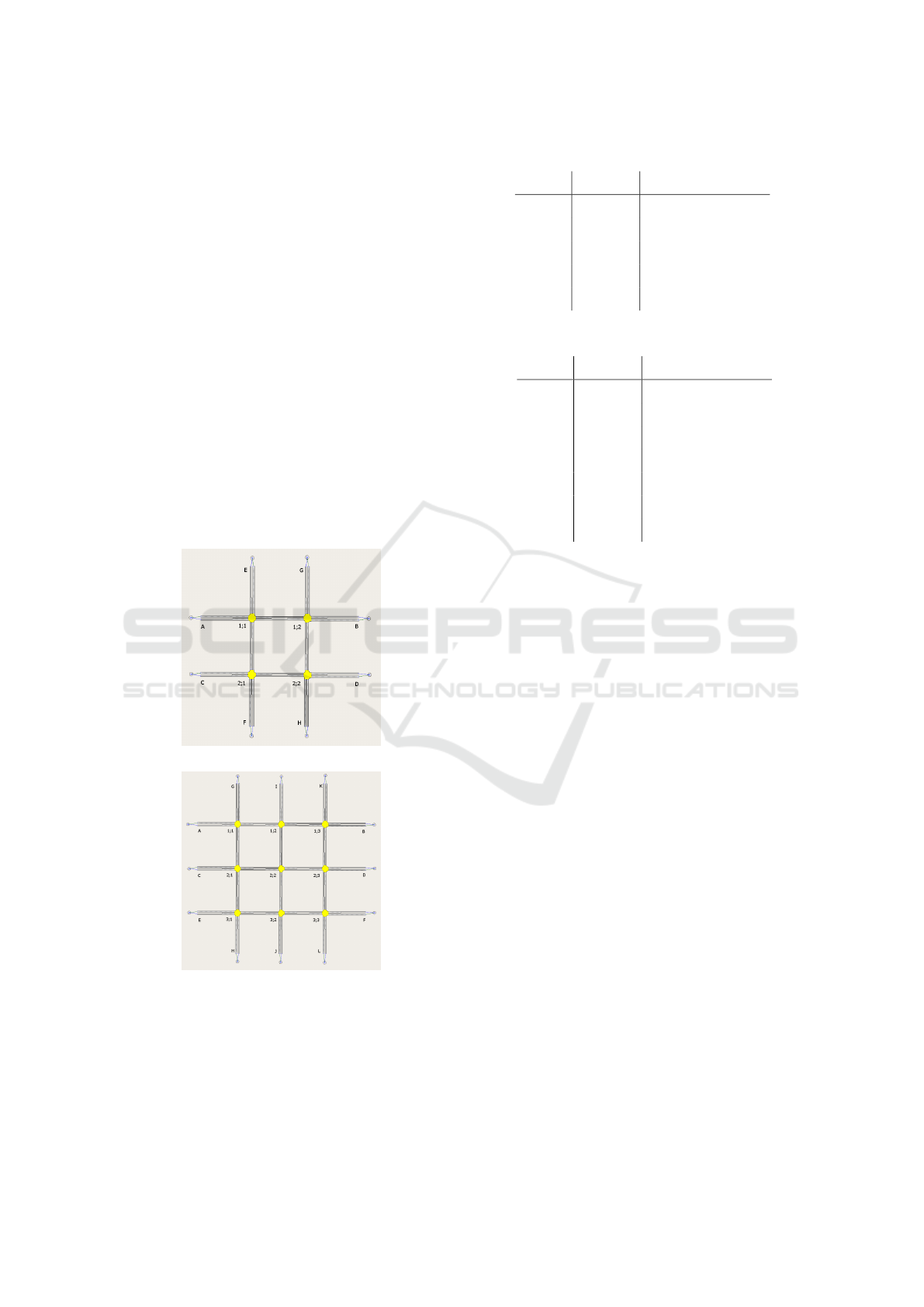
5.1 Road Networks
The traffic simulation was based on two regular, fully
connected Manhattan grids as the initial urban road
networks (see Figure 3). Only cars as vehicles were
considered. All sections had a length 150m – roughly
the section length of Barcelona’s chequered inner-city
road network – with one lane plus additional side
lanes for left-turns.
Urban Traffic Incident Detection for Organic Traffic Control: A Density-based Clustering Approach
155
Following experiments of earlier work by (Tom-
forde et al., 2008), each intersection was controlled by
an identical fixed-time controller (FTC) using 4 signal
phases (with a transition time of 5s in between) and a
control cycle time of 90s. In the phase I, cars on hor-
izontal sections (or leaving them by turning right) are
served for 25s. The remaining cars turning left are
served in the phase II for 10s. The vertical traffic is
handled analogously in phases III and IV.
5.2 Traffic Demand
The traffic demands in Table 1 were also adopted from
(Tomforde et al., 2008), and can be categorised in
primary, secondary, and tertiary demands along with
the “straight” O/D connections. For the 2x2 grid, the
most heavily used O/D pairs are A to B and D to C,
with decreasing demand in their opposite directions
and the vertical straight connections. In the case of
the 3x3 grid, the demands as in Table 2 were similar:
The horizontal directions carry the heavier traffic load
and direction A to B the heaviest.
(a) 2x2 Manhattan grid
(b) 3x3 Manhattan grid
Figure 3: Manhattan network with 4-phased FTCs.
The described scenario had a total duration of 1:15
hours with the first 15 minutes being the warm-up
phase, which was not considered by the incident de-
tection algorithm.
Table 1: Traffic demands in veh/h for 2x2 Manhattan grid.
O/D demand opposite direction
A – B 400 200
C – D 200 400
E – F 150 150
G – H 150 150
others 10 10
Table 2: Traffic demands in veh/h for 3x3 Manhattan grid.
O/D demand opposite direction
A – B 400 200
C – D 300 150
E – F 300 150
G – H 150 150
I – J 150 150
K – L 150 150
other 10 10
5.3 Incidents
All incidents start at 00:45 and last half an hour un-
til the simulation end. This is the second half of
the simulation phase after the warm-up. In addition
to the incident-free simulation run, several scenarios
with one incident were created. Depending on the in-
cident placement along the varying traffic demands
described above, these scenarios fall into three cate-
gories. Due to symmetries of the topology and de-
mands, one incident each was chosen from each cate-
gory.
5.4 Simulation
For the simulation of road networks, incidents, and
traffic demands (and the actual routing of the cars), a
commercial traffic modelling and simulation software
was used: AIMSUN Next (Aimsun SLU, 2020) – an
obvious choice, as it is used for OTC as well (see Sec-
tion 2.1). A client was programmed that used the sim-
ulator’s API to extract vehicle counts from a running
experiment. In this client-server setup, the incident
detection, as well as the generation of plots and log
files for the evaluation were implemented as part of
the server.
5.5 Distance Measures
The applied distance measures for DBSCAN are
briefly explained below. A point of the input data set
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
156

consists of a time series of flow values for a certain
section over the course of a single control cycle – one
measurement per second. DBSCAN is executed once
per section and only time series of the same section
are compared using the distance measure.
Euclidean Distance. The simple length of a straight
line between two points in Euclidean space is widely
used and as the time series have the same resolution,
the exact same points in time are compared.
Dynamic Time Warping (DTW). This similarity
measure by (Berndt and Clifford, 1994) searches a
so-called warping path for two time series: A con-
tinuous and monotonous sequence of pairs of points
from both series. This path has to cover both time se-
ries completely. The cumulative distance between the
data points is calculated based on another measure. In
this work, Euclidean distance is used and the resulting
DTW distance is normalised by the path length.
Figure 4 depicts an artificial example of both dis-
tance measures: While the Euclidean distance only
matches points at the same time, points from one se-
ries can be matched with multiple points from the
other series in DTW.
(a) Euclidean
(b) Dynamic Time Warping
Figure 4: Artificial example for applying distance measures
between the two time series – red and blue – which are con-
nected by multiple lines that show the different data point
matching for DTW (b) and Euclidean distance (a).
Polynomial Approximation. Two time series are
approximated by polynomial functions of a certain
degree – linear and cubic in this work. Then the Eu-
clidean distance between the two lists of polynomial
coefficients is calculated.
Average Distance. The absolute difference be-
tween the average values of two time series.
Relative Distance. This is a derived measure: One
of the above measures is used to calculate a distance
which is then normalised using the maximum of the
two time series averages. Therefore, the distance is
relative to the larger of two average flow values.
5.6 Criteria
To evaluate the choice and combinations of detection
algorithm parameters, these three criteria of decreas-
ing priority were considered:
1. Detection Rate: The most important criterion to
be maximised is similar to the true positive rate in
binary classification tasks. Here, a correct detec-
tion of an incident includes discerning the section
where it occurs. Obviously, the incident should
only be detected after the incident has actually
started. As each scenario contains either one or no
incident, the detection rate is the ratio of correctly
identified and expected incidents for all scenarios
in a model.
2. False Alarms: Number of identified incidents that
do not correspond to a simulated incident (ei-
ther non-existent or located in a different section).
This criterion should be minimal. It is prioritised
lower than the detection rate: Some false alarms
may be tolerated to achieve better detection.
3. Detection Delay: This has to be considered when
applying flattening (see Section 4.2), as incidents
then have to persist multiple control cycles to be-
come significant for the distance measure. Obvi-
ously, smaller time delays are preferable.
5.7 Evaluation Process
The concrete evaluation leading to the results in Sec-
tion 5.8 was an iterative process which comprises of
several phases: Initially, a rather generic set of pa-
rameter combinations was used to prove the general
applicability. This was followed by a manual opti-
misation of the algorithm parameters. Dependencies
were identified along with parameters that have little
to no impact, which can then be locked at a certain
value. Equally, a parameter can already have an obvi-
ous optimal value that outperforms others, so it can be
locked at that optimum as well. These values were the
base for finding a good combination through manual
exploration based on the 2x2 Manhattan grid, which
were then evaluated for the 3x3 grid as well. The goal
Urban Traffic Incident Detection for Organic Traffic Control: A Density-based Clustering Approach
157

was to find a parameter set that is optimal according
to evaluation criteria above for both models.
Initial Parameter Combinations. In their original
description of DBSCAN, (Ester et al., 1996) state that
minPts does not have a significant influence and can
be set to 4 as default. This was done for the initial val-
idation. To find candidates for the more important ε
parameter, k-distance plots for runs with and without
an incident were inspected. Depending on distance
measure and flattening, the ε values were chosen. For
instance, the values 500, 400, 300, 200, and 100 were
selected for “Euclidean distance without flattening”.
For flattening, the weights 33, 50, 66 and 0 were se-
lected. Together with 5 distance measures (all except
the relative distance), this resulted in 100 initial pa-
rameter combinations.
Only moderate detection rates were achieved, cou-
pled with high numbers of false alarms. This indi-
cated the need for adjustments of the incident detec-
tion.
Incident Validation. To improve the discrimination
of traffic fluctuation against real incidents, domain
knowledge was applied: While decreased traffic is ex-
pected in the “incident section” and its downstream
sections, the load should increase upstream as well as
in “detour sections”. A validation mechanism based
on this was devised, which decreased the number of
false alarms significantly, while the detection rates
were conserved.
Finding Incident Indicators. To identify the rea-
sons for weaker detection rates, the correctly detected
incidents were analysed in more detail. These were
mostly associated with high traffic demand. To bet-
ter detect secondary and tertiary incidents, the rel-
ative distance measure was introduced. After test-
ing 10.000 parameter combinations, it showed to be
mainly suitable for the incident indicators rather than
for validators. From there on, the relative distance
was only used for indicators, while the other measures
were only applied for validators.
Detection Delay. A deeper look into the detection
delay showed, that heavier flattening leads to longer
delay: All optimal combinations with regard to detec-
tion rate and false alarms included flattening, which
led to significant delays of at least two control cycle
periods.
Incident Filters. Incidents with certain properties
common to false alarms were identified. One find-
ing was that most of them were situated on the edge
of the road model, possibly due to the way AIMSUN
Next simulates the incoming traffic. These were fil-
tered out.
Additionally, false alarms were discovered almost
exclusively in scenarios that also included incidents.
It showed that some validators confirmed too many
other incidents, which resulted in false alarms. There-
fore, they were restricted to validate at most one inci-
dent.
minPts. Prior to the last optimisation step, the so-
far locked parameter minPts was investigated once
more. The values 2, 3, 4, 5, 6 and 8 were tested for
all sets of distance measures, ε values and flattening
weights as well as for filters, indicator and valida-
tor instances: Especially good combinations of dis-
tance measures and ε work equally well for all tested
minPts values, but as no significant changes occurred,
minPts = 4 was retained.
Parameter Optimisation. Finally, the optimal re-
sults for the 2x2 grid were evaluated in the 3x3 grid in
order to optimise the parameters for unflattened data.
The optimal parameter sets according to detection rate
and false alarm count are chosen from those combina-
tions that achieved an average detection delay of less
than two control cycle durations (180 s).
5.8 Results
Table 3 presents the results for the 2x2 Manhat-
tan grid. It shows that the incident filter reduces
the number of false alarms for all distance mea-
sures. Although the results have been optimal for
some combinations even before introducing the fil-
ter, more combinations of different parametrisation
now show nearly optimal results. An optimal result
was achieved parametrisation when using average dis-
tance for validation and relative distance for indica-
tion.
The Table 4 shows the best ε values for each com-
bination of indicator and validator distance measure
with unflattened data in the 3x3 Manhattan grid. The
results indicate that in the case of unflattened data no
dependency between the indicator and validator pa-
rameter sets exists. For all validator distance mea-
sures, the same ε values work best for both relative
distance measures. In return, the relative average dis-
tance with ε set to 0.95 works best for all validator
distance measures and especially outperforms the rel-
ative DTW with respect to false alarms. The validator
distance measures do not differ significantly in their
results, but the Euclidean distance measure with ε set
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
158
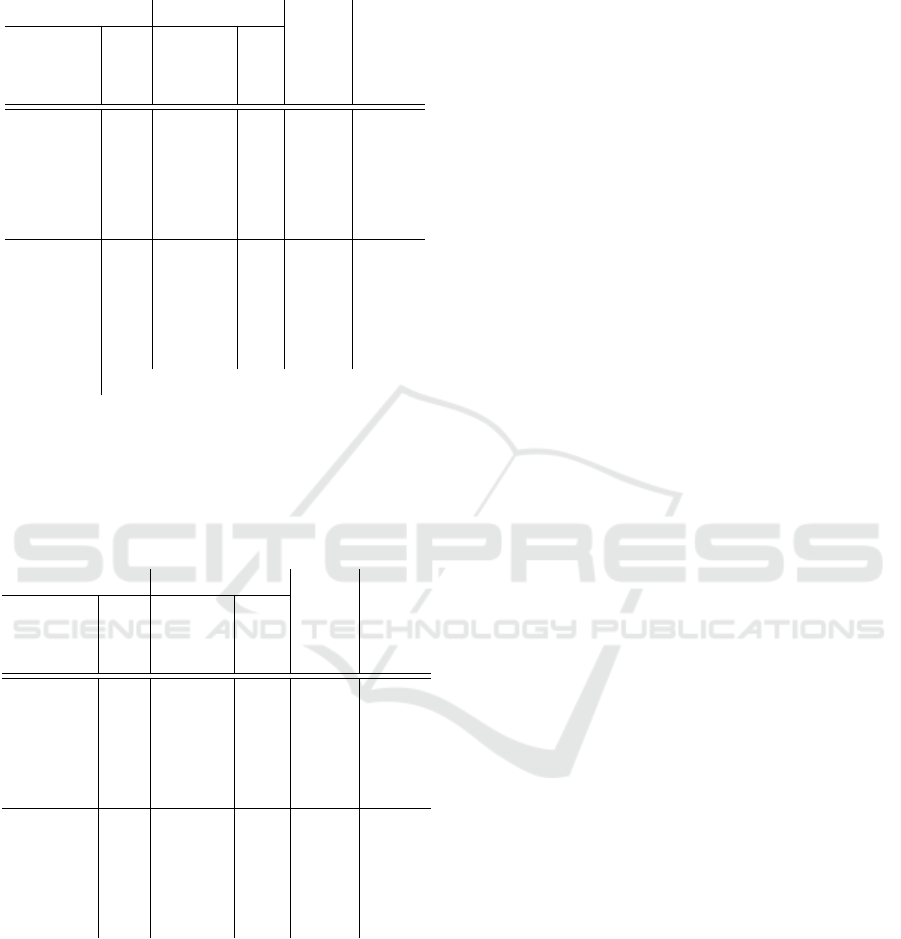
Table 3: Best parametrisations after introducing the incident
filter from initial parameter combinations in a 2x2 Manhat-
tan grid.
Validation Indication
Relative detec- false
distance ε distance ε tion alarms
measure measure rate
Euclidean 200 Average 0.8 1 0
DTW 12 Average 0.8 1 0
Linear 20 Average 0.8 1 0
Cubic 24 Average 0.8 1 0
Average 8 Average 1 1 0
Euclidean 200 DTW 0.8 1 0
DTW 18 DTW 0.8 1 0
Linear 20 DTW 0.8 1 1
Cubic 12 DTW 0.8 1 1
Average 16 DTW 0.8 1 0
to 150 and the cubic approximation distance with 9
as ε achieve slightly better results than the other mea-
sures.
Table 4: Best parametrisations after introducing the inci-
dent filter from promising parameter combinations in a 3x3
Manhattan grid.
Validation Indication
Relative detec- false
distance ε distance ε tion alarms
measure measure rate
Euclidean 150 Average 0.95 1 4
DTW 9 Average 0.95 1 7
Linear 10 Average 0.95 1 7
Cubic 9 Average 0.95 1 5
Average 8 Average 0.95 1 7
Euclidean 150 DTW 0.8 1 20
DTW 9 DTW 0.8 1 24
Linear 10 DTW 0.8 1 24
Cubic 9 DTW 0.8 1 23
Average 8 DTW 0.8 1 26
6 FUTURE WORK
The evaluation process in Section 5 showed that, in
principle, DBSCAN combined with some enhance-
ments can be employed for incident detection in sim-
ple urban road networks. Several assumptions are
made in the context of the experiments, and future
research could address the consequent limitations.
Model Expansion. More realistic – and complex
– road networks and traffic demands have to be ad-
dressed, e.g., real-life networks with challenging traf-
fic loads like during rush-hour. Also, the underlying
incident model can be expanded dramatically. Instead
of a “binary” roadblock, real-life incidents can have
varying effects with respect to spatial (location, mov-
ability, extend, . . . ) or temporal characteristics (dura-
tion, regularity, . . . ). Finally, an incident may occur
isolated: Different types of traffic incidents may ap-
pear simultaneously or with relatively small delay.
Algorithm Enhancements. The presented incident
detection can be extended: Additional distance mea-
sures or even a different clustering algorithm are con-
ceivable, e.g., the Local Outlier Factor (LOF) by
(Breunig et al., 2000), which shares similarities with
DBSCAN. Also, an expansion of the model might
provide domain knowledge, which could be benefi-
cial for incident indication and validation.
Parameter Optimisation. The evaluation in Sec-
tion 5.7 for a restricted selection of algorithm param-
eters already generated thousands of test runs. To-
gether with the extensions proposed above, a manual
inspection of parameters sets is no longer feasible.
Hyperparameter optimisation from machine learn-
ing could provide suitable techniques, for instance,
grid search, evolutionary algorithms, Bayesian or
gradient-based optimisation
Integration with OTC. The structured exploration
of parameters on potentially much more complex
models calls for an automated system for setting up
and conducting experiments as well as the subsequent
evaluation. Consequently, the integration into the Or-
ganic Traffic Control could improve the self-adaptive
and self-organising capabilities of the OTC.
7 CONCLUSION
In this work, a traffic incident detection approach
in the context of urban road networks is presented,
which employs the density-based clustering algorithm
DBSCAN together with some enhancements. These
include incident validation using surrounding sec-
tions, a combination of different algorithm parameter
sets for the detection and validation of incidents, and
filtering out incidents with characteristics common to
false alarms. These enhancements are results of the
evaluation process, which eventually show the princi-
pal applicability of the proposed approach.
Urban Traffic Incident Detection for Organic Traffic Control: A Density-based Clustering Approach
159

The experimental setup is limited compared to
real-life networks, traffic demands and incidents. To-
gether with the numerous and often manual evaluation
steps, further research steps can be identified, which
were also presented as future work.
REFERENCES
Aimsun SLU (2020). Aimsun Next Professional, Version 20.
Barcelona, Spain.
Berndt, D. J. and Clifford, J., editors (1994). Using dy-
namic time warping to find patterns in time series,
volume 10. Seattle, WA, USA.
Breunig, M. M., Kriegel, H.-P., Ng, R. T., and Sander, J.
(2000). Lof. In Dunham, M., Naughton, J. F., Chen,
W., and Koudas, N., editors, Proceedings of the 2000
ACM SIGMOD international conference on Manage-
ment of data - SIGMOD ’00, pages 93–104, New
York, New York, USA. ACM Press.
Ester, M., Kriegel, H.-P., Sander, J., and Xu, X. (1996).
A density-based algorithm for discovering clusters in
large spatial databases with noise. pages 226–231.
AAAI Press.
M
¨
uller-Schloer, C. and Tomforde, S. (2017). Organic Com-
puting – Technical Systems for Survival in the Real
World. Autonomic Systems. Birkh
¨
auser. ISBN: 978-
3-319-68476-5.
Parkany, E. and Xie, C. (2005). A complete review of inci-
dent detection algorithms & their deployment: What
works and what doesn’t.
Payne, H. J. and Tignor, S. C. (1978). Freeway incident-
detection algorithms based on decision trees with
states. In Urban system operation and freeways,
Transportation research record. National Academy of
Sciences, Washington, DC.
Pimentel, M. A., Clifton, D. A., Clifton, L., and Tarassenko,
L. (2014). A review of novelty detection. Signal Pro-
cessing, 99:215–249.
Sommer, M., Tomforde, S., and H
¨
ahner, J. (2016). An or-
ganic computing approach to resilient traffic manage-
ment. In McCluskey, T. L., Kotsialos, A., M
¨
uller, J. P.,
Kl
¨
ugl, F., Rana, O., and Schumann, R., editors, Auto-
nomic Road Transport Support Systems, pages 113–
130. Birkh
¨
auser, Basel.
Tomforde, S., Prothmann, H., Branke, J., H
¨
ahner, J., Mnif,
M., M
¨
uller-Schloer, C., Richter, U., and Schmeck, H.
(2011). Observation and control of organic systems.
In Organic Computing—A Paradigm Shift for Com-
plex Systems, pages 325–338. Springer.
Tomforde, S., Prothmann, H., Rochner, F., Branke, J.,
H
¨
ahner, J., M
¨
uller-Schloer, C., and Schmeck, H.
(2008). Decentralised progressive signal systems
for organic traffic control. In 2008 Second IEEE
International Conference on Self-Adaptive and Self-
Organizing Systems, pages 413–422. IEEE.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
160
