
A Robust Real-time Component for Personal Protective Equipment
Detection in an Industrial Setting
Pedro Torres
1
, Andr
´
e Davys
1
, Thuener Silva
1
, Luiz Schirmer
1
, Andr
´
e Kuramoto
2
, Bruno Itagyba
2
,
Cristiane Salgado
2
, Sidney Comandulli
2
, Patricia Ventura
2
, Leonardo Fialho
2
, Marinho Fischer
2
,
Marcos Kalinowski
1
, Simone Barbosa
1
and H
´
elio Lopes
1
1
Department of Informatics, PUC-Rio, Rio de Janeiro, Brazil
2
PETROBRAS, Rio de Janeiro, Brazil
{kuramoto, itagyba, cristiane.salgado, comandulli, patriciarventura, leofmello, marinhof}@petrobras.com.br
Keywords:
Artificial Intelligence, Industrial Application, Computer Vision, Real-time System.
Abstract:
In large industries, such as construction, metallurgy, and oil, workers are continually exposed to various haz-
ards in their workplace. Accordingly to the International Labor Organization (ILO), there are 340 million
occupational accidents annually. Personal Protective Equipment (PPE) is used to ensure the essential protec-
tion of workers’ health and safety. There is a great effort to ensure that these types of equipment are used
properly. In such an environment, it is common to have closed-circuit television (CCTV) cameras to moni-
tor workers, as those can be used to verify the PPE’s proper usage. Some works address this problem using
CCTV images; however, they frequently can not deal with multiples safe equipment usage detection and oth-
ers even skip the verification phase, making only the detection. In this paper, we propose a novel cognitive
safety analysis component for a monitoring system. This component acts to detect the proper usage of PPE’s
in real-time using data stream from regular CCTV cameras. We built the system component based on the top
of state-of-art deep learning techniques for object detection. The methodology is robust with consistent and
promising results for Mean Average Precision (80.19% mAP) and can act in real-time (80 FPS).
1 INTRODUCTION
Workers, especially in an industrial setting, are con-
tinually exposed to various hazards in their work-
place. In this context, unfortunately, there are sev-
eral fatal cases. The Brazilian Protection Statistical
Yearbook
1
shows an average of six hundred thousand
occupational accidents and 2600 deaths per year, reg-
istered between 2010 and 2017.
A company, such as an oil and gas refinery, could
avoid injuries by monitoring its workers to prompt
corrective measures when the personal protective
equipment (PPE) is not used appropriately. Neverthe-
less, this activity is often performed by a human from
a constant visual local inspection or closed-circuit
television (CCTV). In this scenario, an industry could
benefit from a system powered by Machine Learning
and Computer Vision techniques to automate this task
1
https://bc.pressmatrix.com/pt-BR/profiles/
1227998e328d/editions/0e55e8eba33a3ed62b2e/pages/
page/40
in order to prevent accidents, minimize costs, and in-
juries. Figure 1 illustrates a possible industrial sys-
tem to monitor the use of PPE automatically and emit
alarms when they are missing or not used appropri-
ately. The system is fed with RGB images from a
CCTV, each image initially passes through the detec-
tion and verification component. This component is
the fundamental basis of the system and is responsible
for producing evidence of deviations from inappro-
priate use of the equipment by workers. Finally, the
ID association component can match those evidences
with the worker’s identity in the company database
and issue an alert with the worker’s identification and
type of deviation.
Regarding the detection and verification compo-
nent, there are two main approaches to address the
problem of PPE detection with Computer Vision tech-
niques. One approach uses one-stage classifiers (Bo
et al., 2019), which handles the detection and veri-
fication phases throughout a single model. Another
approach employs a multi-stage classifier (Li et al.,
2017), which uses one or more models to handle each
Torres, P., Davys, A., Silva, T., Schirmer, L., Kuramoto, A., Itagyba, B., Salgado, C., Comandulli, S., Ventura, P., Fialho, L., Fischer, M., Kalinowski, M., Barbosa, S. and Lopes, H.
A Robust Real-time Component for Personal Protective Equipment Detection in an Industrial Setting.
DOI: 10.5220/0010452606930700
In Proceedings of the 23rd International Conference on Enterprise Information Systems (ICEIS 2021) - Volume 1, pages 693-700
ISBN: 978-989-758-509-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
693

phase. Both approaches show good results but are
limited to identify just one PPE (hardhat in the major-
ity of cases). Suggesting that the multiple PPE detec-
tion is more challenging than detecting a single PPE
(Zheng et al., 2019; Nath et al., 2020).
Although important in the scenario described in
the Figure 1, we will not conduct an in-depth explo-
ration of the challenges related to the ID Identifica-
tion component, as they lay outside of the scope of
this work. We shall focus on exploring the two main
approaches for implementing a detection and verifi-
cation component (highlighted as the blue box of the
Figure 1) that is both robust and capable of act in real-
time for monitoring systems in a industrial environ-
ments, especially oil and gas refineries.
Figure 1: Example of an industrial monitoring system for
PPE compliance.
Our main contributions are:
• Evaluating two approaches to solve the PPE de-
tection problem. In our first approach, we built
a one-stage classifier. While in our second ap-
proach, we build a multi-stage classifier.
• A dataset for PPE detection that addresses multi-
ple types of equipment.
• Exploring how ensemble classifiers performs for
the verification stage of a multi-stage implemen-
tation.
The paper is structured as follows: Section 2 presents
a literature review of Deep Neural Networks and the
use of object detection models to solve the PPE de-
tection problem; Section 3 describes the construction
and exploration process adopted for the proposed ap-
proaches and also includes details regarding dataset
generation; Section 4 presents the performance com-
parison of models and approaches and Section 5, the
conclusion.
2 LITERATURE REVIEW
The use of DNN (Deep Neural Networks) has
achieved state-of-the-art in different Computer Vision
tasks in recent years. Convolutional Neural Networks
(CNN) have emerged as an important approach to per-
form a broad range of visual tasks (Krizhevsky et al.,
2012; Ren et al., 2015). CNNs are composed of lay-
ers of filters that represent neighbourhood spatial con-
nectivity patterns. Its use of convolutions, non-linear
activation functions and downsampling results in a hi-
erarchical understanding of those features. A crucial
aspect of this interleaving of operations is that they
usually fuse spatial and channel-wise information.
Recent advances of image classification focus on
training feedforward convolutional neural networks
using “very deep” structure (Simonyan and Zisser-
man, 2014; Szegedy et al., 2015; He et al., 2016).
The feedforward convolutional network mimics the
bottom-up paths of the human cortex. Several ap-
proaches have been proposed to improve further the
discriminative ability of deep convolutional neural
network. VGG (Simonyan and Zisserman, 2014), In-
ception (Szegedy et al., 2015) and residual learning
(He et al., 2016) are frameworks that are able to train
very deep neural networks. VGGNets and Inception
models investigated very deep architectures in detail.
A complementary approach is ResNets, which ap-
plied skip connections also to improve the training of
deep networks (He et al., 2016).
Considering PPE detection, to improve the results,
some studies use different neural network architec-
tures for dealing with this task. One of the first works
in this direction was shown in (Fang et al., 2018),
in which the authors use the Faster R-CNN neural
network to detect workers’ non-hardhat-use in a con-
struction scenario. According to results, they demon-
strate that the use of Faster R-CNN can facilitate im-
proved safety inspection and supervision in a real con-
struction environment.
Bo et al. (2019) use the YOLO-v3 for hardhat de-
tection. You only look once (YOLO) (Redmon et al.,
2016) is a state-of-the-art, real-time object detection
system that uses a single neural network to predicts
bounding boxes and class probabilities directly from
full images in one evaluation. Since the whole de-
tection pipeline is a single network, it can be opti-
mized end-to-end directly on detection performance.
The authors tested this detection model in images col-
lected from an electric power construction scenario
and are interesting in detect if a worker use hardhat or
not.
The work presented above aims to construct a
model for hardhat wearing detection. However, in
some cases, we are interested in detect multiple PPEs,
such as hardhat, gloves, and worker vests. In this
sense, Zheng et al. (2019) and Nath et al. (2020) de-
veloped models to handle a higher amount of PPE.
Nath et al. (2020) propose three different approaches
to detect multiple PPEs in construction scenario.
In the first approach, they developed a multi-stage
ICEIS 2021 - 23rd International Conference on Enterprise Information Systems
694

model, where the YOLO-v3 model detects workers,
hats, and vests and then, a simple machine learn-
ing classifier is applied to verify whether a worker is
wearing hardhat and vest. In the second approach,
they use an one-stage model, based on YOLO-v3,
in which the model simultaneously detects individual
workers and verifies the PPE usage. The third ap-
proach developed a multi-stage model, in which the
YOLO-v3 detects only workers in a scenario and then
cropped these detections to feed a CNN classifier that
is responsible for verifying the PPE compliance.
Deep neural networks have been revealed to
be quite useful for solving object identification
tasks (Nath et al., 2020). Despite the meaningful re-
sults described in the literature, in the industrial do-
main, this approach has limitations considering the
time of inference and precision. In this work, we pro-
pose robust approaches that can be used as a funda-
mental component of a monitoring system for PPE
detection that uses YOLO-v4 model as a basis for
implementing the proposed approaches. We also ex-
periment with new adaptations, in terms of models
and parameters for the multi-stage approach, where
we create a solution that uses ensemble classifiers.
As one will see in the next sections, our approaches
present promising results (in terms of mAP) and still
capable of act in real-time.
3 METHODOLOGY
This section presents the construction and exploration
process for the two proposed approaches, including
dataset generation, used to carry out model training
and evaluation. In this work, we evaluate whether
these approaches are ready to act in real-time and
with robustness when implemented as a fundamental
component of a monitoring system that seeks to de-
tect which workers are making the appropriate use of
PPEs.
For this study, we choose to focus on two types
of PPE, hardhat and protective clothing. These types
of equipment are often used to ensure the safety of
workers in the oil and gas industry and civil construc-
tion. Our approaches are based on techniques for de-
tecting and classifying objects in images. In this way,
we have four possible classes to perform the classifi-
cation, which are: worker with no PPE (W), worker
wearing a hardhat (WH), worker wearing protective
clothing (vest) (WV), and worker wearing a hardhat
and protective clothing (WHV). Notice that the ap-
proaches implemented for this work can be extended
to any types of PPE, but not without an increase in
complexity due to the number of different combina-
tions of equipment.
The detection and verification component is based
on models that empower deep learning methods ca-
pable of being executed in real-time. In Nath et al.
(2020) work, which also addresses the problem of de-
tecting multiple PPEs, the authors adopt as the defini-
tion for real-time system one that can process at least
five frames per second (FPS). When this is not possi-
ble, values ≥ 1 FPS are considered ”near real-time”.
These definitions emerge from previous work (Red-
mon et al., 2016) which also raise this concern. In this
work, we follow the same definition since the context
is quite similar. We expect that our implementation
can act in real-time with a prompt response when a
worker’s life is exposed to risk.
In particular, both approaches employ YOLO-v4
architecture and carry some of the steps in a similar
manner, such as preparing data and the models’ train-
ing. In the approach I, for each image, we annotate
one bounding box for each worker, where the class of
this bounding box informs which PPE the worker is
wearing. This way, we create a single model based on
YOLO-v4 architecture for detection and verification
phases. Approach II uses one model for the detection
phase and another model for the verification phase.
First, we detect workers bounding boxes from images
based using a model based on the YOLO-v4. Next, a
convolutional neural network is applied for PPE com-
pliance verification. The details for both approaches
are clarified in Subsection 3.3 and Subsection 3.4.
3.1 Dataset Generation
Supervised machine learning applications requires a
large annotated dataset to provide the learning model
a way to create and recognize patterns through the
data. As we did not have access to a large image
dataset available for PPE detection, it was necessary
to create the annotated dataset to feed the model.
The dataset used in this work is composed of im-
ages from the following sources: Crowd-sourced (as
used by Nath et al. (2020)), GDUT-HWD (Wu et al.,
2019), Web-scrapped, and images captured by the au-
thors. Of the datasets that already had annotation
(Crowd-sourced and GDUT-HWD), the only one that
deals with the identification of workers using multi-
ple PPE’s is Crowd-sourced, where the annotation of
classes is the same as that used in this work. For
GDUT-HWD, only the images were used, since the
dataset annotations are only for the individual iden-
tification of safety helmets. To compose the Web-
scrapped source, images were obtained from public
databases using search engines that perform searches
by keywords, e.g., ”workers in refinery”, ”workers in
A Robust Real-time Component for Personal Protective Equipment Detection in an Industrial Setting
695
platforms”. After the complete collection of these im-
ages, there was a visual inspection to remove images
that were out of context or that had low quality. The
images captured by the authors were taken in a con-
trolled environment that sought to reproduce the con-
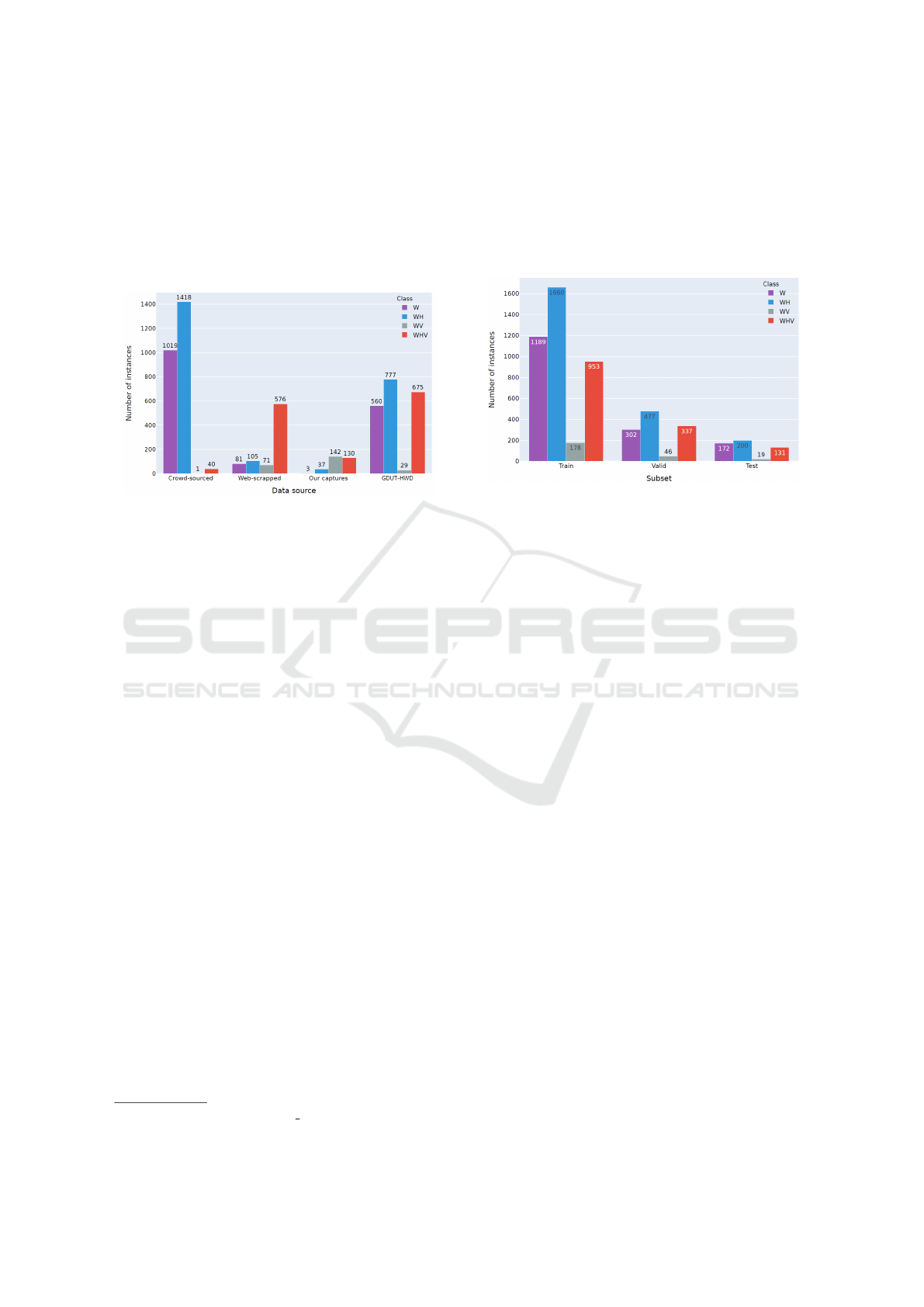
ditions of an industrial environment. The Figure 2
shows the number of instances for each data source.
Figure 2: Distribution of instances per class for each data
source.
In the annotation procedure to mark bounding boxes
of objects in images for training the models, we aimed
to minimize the annotation bias by taking the follow-
ing procedure. For each data source, except for the
Crowd-sourced (already annotated), the dataset was
split into equal-sized batches. Each batch was ini-
tially annotated by a person using the YOLO mark
tool
2
, an open source library for image annotation.
At the end of the annotation of a batch, an annota-
tor review the annotations of another one and sepa-
rate those that presented divergences (concerning the
annotated class, or bounding box region). Each diver-
gence was discussed by annotators until they reached
a consensus, defining the ground truth for each image.
3.2 Data Preprocessing
In the dataset preparation, we randomly divided the
images into three subsets: training (70%), validation
(20%) and testing (10%). This division of the dataset
was carefully considered to ensure similar distribu-
tions of the classes for each set. To ensure some simi-
larity among the sets, we split the data sources assur-
ing the proportion was the same, i.e., training, testing,
and validation sets have the same percentage of each
data source, making the sets more homogeneous.
Note that the dataset was split based on the num-
ber of images. Thus, to verify whether the instances
proportion for each subset is similar, we analyzed the
distribution of number of instances, as shown in Fig-
2
github.com/AlexeyAB/Yolo mark
ure 3. According to the figure, the same proportion
between classes is maintained for all subsets. More-
over, it is possible to observe that the dataset has many
examples for WH class and a few examples for WV
class, which can hinder the learning model from gen-
eralizing these classes.
Figure 3: Number of instances per class for each subset.
To improve the ability to detect objects accurately,
YOLO uses nine anchor boxes, which must be defined
for use during the training and inference phases. With
the anchor boxes defined, the model can specialize in
objects of certain sizes and objects with a particular
aspect ratio (height × width).
In practice, during the training phase, each cell of
the feature maps of the network’s output layers has an
associated anchor box. Thus, the model learns how to
shift and scale an anchor box so that the coordinates
of the prediction bounding box fits the object of in-
terest. To define the anchor boxes, the K-Means clus-
tering algorithm was used, with k = 9. The algorithm
was executed with the training set bounding boxes as
input.
3.3 Approach I
The first approach uses a YOLO-v4 model, which we
will call YOLO-v4-AP1, to perform the identification
and verification steps in one-stage. During the anno-
tation phase, the regions where the workers are lo-
cated and labeled with one of the classes (W, WV,
WH, WHV). Once the model is trained, the inference
provides a worker’s location and the class detected de-
termine which PPE he/she is using.
Figure 4 demonstrates how the approach I is car-
ried out. One of the main advantages of approach I is
able to take advantage of the ability that YOLO mod-
els make predictions (with the locations of objects and
their respective classes) using a single network, which
makes a simple and yet effective method.
Following the inference phase, the YOLO-v4-AP1
ICEIS 2021 - 23rd International Conference on Enterprise Information Systems
696
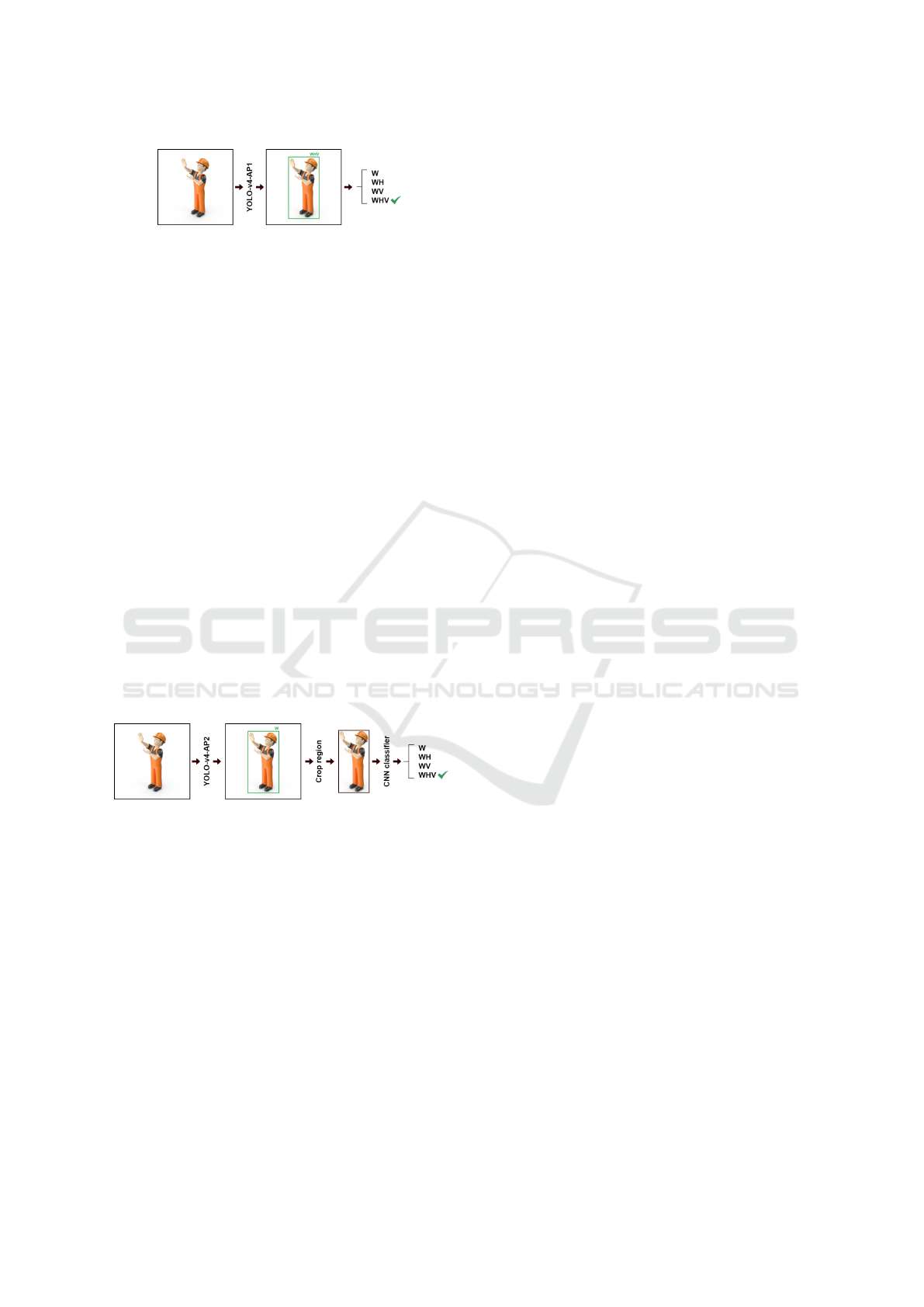
Figure 4: Approach I.
model performs predictions, only detections with a
confidence score above 50% are considered as final
predictions. It is worth mentioning that the model
can make duplicate detections and present different
classes for the same worker, but following the prob-
lem definition, a worker can only belong to one class.
To avoid duplicate detections, the model uses non-
maximum suppression (NMS). Usually, NMS adds 2-
3% in mAP (Redmon et al., 2016).
3.4 Approach II
In this approach, we use a multi-stage method to per-
form the identification and verification of the proper
usage of PPE’s by workers. Initially, a YOLO-v4
model is used (which we will call YOLO-v4-AP2)
only to locate the worker (detection stage). Thus,
there is only the worker class (W), to carry out the
equipment verification stage we use a CNN that re-
ceives cropped images for each region in which it is
detected a given worker. This CNN classifies each
image according to the four possible classes (W, WH,
WV, WHV). The Figure 5 illustrate how this multi-
stage approach is performed.
Figure 5: Approach II.
For this approach, we adopted the following classi-
fiers: VGG-16, ResNet50, ResNet101 and Inception.
For each classifier, a dropout layer with probability
p = 0.3, a fully connected layer with 256 nodes and
regularization L1 and L2 with rw = 10
−3
was added
after the convolutional blocks (base model). The layer
is followed by the ReLU (Rectified Linear Unit) acti-
vation function. Additionally, the input dimensions
of the networks were adapted to receive images in
the format 150 × 150. A modification was made to
the output layer dimensions, where the network must
have four nodes, one node for each class. Finally, this
layer is followed by the activation function SoftMax.
In the training step, we use a transfer learning
strategy, using the weights pre-trained with the Ima-
geNet dataset for the convolutional layers. We freeze
these layers and retrain the models with 60 epochs us-
ing the Adam optimizer with a learning rate η = 10
−5
.
As the classifiers receive only the image cropped
with the worker’s location, the dataset used was built
from each instance of the annotation that belongs to
the training set’s grounding truth. The images are
scaled to the size 150×150 to match the networks’ in-
put size. For data augmentation, the following trans-
formations were applied to images: random zoom and
shear range of up to 20%, a horizontal flip was also
applied to up to half of the images.
We also improve approach II by using an ensem-
ble of classifiers. Thus, when performing the veri-
fication stage, we do not use the learning of a sin-
gle classifier, but the learning from a set of classifiers
(VGG16, Inception, ResNet50 and ResNet101). We
believe that by combining the predictions of multi-
ple classifiers, we can reduce the variance and make
the classification less dependent. Further, the clas-
sification bias can also be reduced since the classi-
fiers together can make the class distinction criteria
more expressive. The ensemble prediction combina-
tions were given from the voting (majority) method.
That is, each classifier assigns his vote to the class
with the highest probability. The final prediction is
given to the class that received the highest number of
votes.
3.5 Model Training
Implemented models from approaches I and II, all
layers, except the last three output layers, have their
weights captured from training the YOLO-v4 model
in the COCO dataset. After this first train, a trans-
fer learning method is applied to take advantage of
the model’s ability to detect up to 80 classes (person,
car, motorcycle, etc.) from the COCO dataset and ap-
ply the knowledge in our domain. Since this model
has already been trained from a more significant num-
ber of images, it can generalize its learning ability to
distinguish resources for our task, in which there is a
much smaller number of images. It may seem that two
tasks have no evident intersection, in addition to that a
worker is also a person, but in problems that address a
classification or detection task, some low-level char-
acteristics, such as, edges, shapes and contours, can
be shared between tasks, thus allowing the spread of
knowledge between them.
The models of approaches I and II were re-trained
following the same definitions of hyperparameters.
The re-training was allowed 30 epochs with the learn-
ing rate η = 0.0013, using the Adam optimizer. To
accelerate the learning convergence process and to
also mitigate the model’s overfitting, the value of
A Robust Real-time Component for Personal Protective Equipment Detection in an Industrial Setting
697

momentum = 0.949 and decay = 0.0005 was adopted.
Additionally, to improve model performance in
the real scenario, we use the data augmentation tech-
nique, which is performed in real-time during the
model’s re-training phase. To create more diversifi-
cation in training images the Mosaic technique was
used, which was introduced together with YOLO-v4.
This method mixes four training images. Hence, four
different contexts are mixed and could allow the de-
tection of objects that are out of their normal context.
In addition, we also make random changes to the HSV
color-space of the images, where the saturation and
exposure values are modified by a factor of up to 1.5.
4 EXPERIMENTAL RESULTS
4.1 Perfomance of the YOLO-V4
Models
The performance of the YOLO models are evalu-
ated using the mAP (Mean Average Precision) metric,
which is used in several object detection models (e.g.,
Faster R-CNN, R-CNN, SSD). One of the advantages
of the mAP is that we can quantify how well an ob-
ject detection model is performing in a data set using
a single numerical representation. Figure 6 presents
the performance results of the detection models used
in the approach I (YOLO-v4-AP1) and approach II
(YOLO-v4-AP2) for the test set. The highest value
mAP (88.18%) is obtained by the approach II model,
which was expected since there is only one class to be
detected. A factor that may have contributed consid-
erably to the performance of the model was the use of
transfer learning. In this case, we have a notable simi-
larity between the COCO dataset person class and the
worker class (W). For approach II, we have a mAP of
80.19%, which is a good result, since this approach
makes use of a single model to perform the stages
of detection and verification. That is, the result of
this approach will not change, while the results of ap-
proach II will change when we add the verification
step, being directly affected according to the perfor-
mance of the classifiers.
Figure 6: Perfomance of the YOLO-v4 models for each ap-
proach.
4.2 Performance of Classifiers
To evaluate the classifiers proposed for the verifi-
cation step in approach II, instances of the test set
were used. The accuracy of the VGG-16, Inception,
ResNet50 and ResNet101 models for classifying im-
ages in classes W, WH, WV and WHV are 82.85%,
78.35%, 84.02% and 82.75%, respectively. Figure 7
shows the confusion matrix for each model. Note that
the WHV class has the lowest accuracy in all clas-
sifiers. One reason is confusion with the WH class,
which has an average value of 20.05% for false nega-
tives. That is, once a worker is being detected with a
helmet, it is difficult to distinguishing between wear-
ing or not wearing safety clothing. The individual
accuracy for the rest of the classes (W, WH, WV)
presents values higher than 80%, with the exception
of class W when evaluated in Inception, which had a
value of 6.6% below the average (82.83%).
Figure 7: Confusion matrices for VGG-16, Inception,
ResNet50 and ResNet101 classifiers.
4.3 Performance of Approaches
In this subsection, we will evaluate the final perfor-
mance of the approaches I and II. Note that this re-
sult depends directly on the performance of the im-
plemented models. Figure 8 shows that approach I
obtained the best mAP (80.19%), even when com-
pared with the different model combinations used in
approach II. Although the YOLO-v4-AP2 model pre-
sented a MAP of 88.18% in the detection step, the
errors of the classifiers for the verification step end up
reducing the mAP, since some of the instances will be
classified incorrectly, generating false positive. The
best result for approach II presents 72.87% of mAP
given from the use of the YOLO-v4-AP2 model plus
the ensemble with the classifiers VGG16, ResNet50,
and ResNet101, which are the classifiers that reported
the greatest accuracy. In the scenario where only one
classifier was used in the verification step, the best re-
sult is obtained using ResNet101 (70.42% of mAP).
We also compared the processing time spent by
each approach. We run all models on the same ma-
chine, which has the following configurations: Intel
ICEIS 2021 - 23rd International Conference on Enterprise Information Systems
698
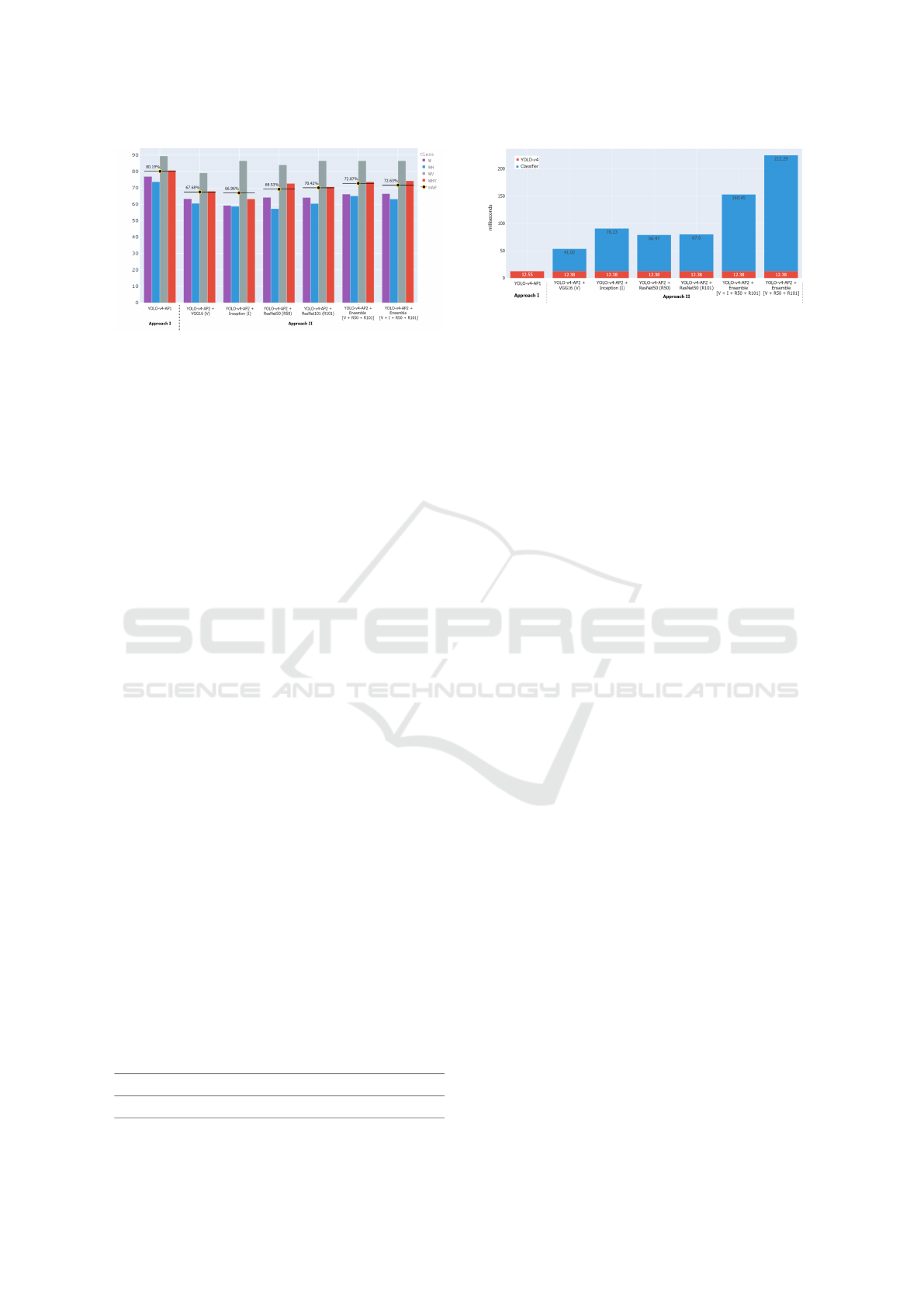
Figure 8: Performance comparison of approaches imple-
mentation.
Core i9-7900X, 128 GB RAM and TITAN RTX GPU
with 24 GB memory. Figure 9 presents the average
processing time for a test image in each approach.
Approach I has the best processing time (12.55ms).
For approach II the time of the YOLO-v4-AP2 model
is slightly less (12.38ms) than the model implemented
in approach I, but when adding the classifiers time,
that time increases significantly, making approach II
the slowest, with times in the interval of 53.4ms to
224.67ms. As the proposed models run at a rate of
at least 5 FPS (frames per second), following the def-
inition adopted in this work (same as Redmon et al.
(2016) and Nath et al. (2020)), we can say that these
approaches are capable to process videos in real-time
applications and can be implemented as the base com-
ponent of a monitoring system for PPE compliance.
4.4 Benchmark of Results
Since the dataset or models used in the work of Nath
et al. (2020) were not made available by the authors,
we have to find other alternatives. To perform a fair
comparison of the methodology adopted in this work
and verify if the approaches were effective, we estab-
lish a comparison with the results obtained from the
YOLO-v3 model. The model was trained and tested
in a similar way to the YOLO-v4-AP2 model. Ta-
ble 1 shows the comparison between models in terms
of mAP and FPS. Concerning mAP, we have an in-
crease of 21.52% and 13.96% when comparing the
YOLO-v4-AP1 and YOLO-v4-AP2 (with ensemble)
models with baseline (YOLO-v3), respectively. On
the other hand, there is an increase in FPS. However,
since the models of approach I and II are already able
to run in real-time, this gain is not very significant.
Table 1: Comparison of mAP and FPS with a baseline
model.
Criteria
Baseline model
(YOLO-v3)
Approach one-stage (I)
(YOLO-v4-AP1)
Approach multi-stage (II)
(Ensemble: V + R50 + R101)
mAP 58.67% 80.19% 72.87%
FPS 104 80 7
Figure 9: Processing time comparison for approaches im-
plementation.
5 CONCLUSIONS
This work explores the implementation of two differ-
ent approaches based on deep-learning to perform the
task of detecting the usage of PPEs by workers. We
aimed to develop and evaluate approaches that are ro-
bust and capable of acting in real-time, so that they
can be implemented as a fundamental component (de-
tection and verification) of a monitoring system.
Although in this paper, we focus on two types
of PPEs (hardhat and protective clothing), our re-
sults show that we can employ our methodology to
any number of equipment (e.g., goggles, gloves, and
masks) changing the networks’ output layers. The ef-
fect of this, is an increase in complexity due to the
number of different combinations of equipment.
To carry out the models’ training, we built a
dataset from four different sources to supply our mod-
els with a more significant number of images from
different devices, angles, lighting, and environments.
To enable our models to be able to generalize better.
For Approach I, we built a single model based on
YOLO-v4 implemented in one-stage; that is, the same
model is responsible for identifying and verifying the
use of PPE. Hence, when receiving an image as input,
the model classifies each founded region that displays
a worker, with one of the following classes: W, WV,
WH, and WHV. In contrast, Approach II is multi-
stage, with at least two distinct models for the iden-
tification and verification stages. Initially, a YOLO-
v4 based model detects the regions in which workers
are located. Then, a convolutional neural network re-
ceives the clipping from each region and performs the
verification step, which consists of classifying the im-
age into W, WV, WH, and WHV classes.
Both proposed approaches outperforms the base-
line results relating to mAP. Our results show Ap-
proach I presenting the best mAP for detecting PPEs
(80.19%). Although YOLO-v4-AP2 mAP display
superior results (88.18%), the classifiers’ errors in
the verification step decrease the final mAP. This
effect is evident even for our best implementation,
A Robust Real-time Component for Personal Protective Equipment Detection in an Industrial Setting
699

Figure 10: Example of detections obtained from YOLO-v4-AP1 model. The first two images are from the Crowd-sourced
dataset. The third image is from the Web-scrapped dataset that is in an industrial setting.
which employs an ensemble of classifiers VGG16,
ResNet50, and ResNet101, producing a final mAP of
72.87%. These results may indicate that superior re-
sults may be obtained from the individual improve-
ment of the classifiers or methods proposed in this
work. The ensemble method achieved an increase
of up to 2.45% compared to the best single classi-
fier (ResNet50) mAP (70.42%) of Approach II. Re-
garding the processing time, Approach I proved to be
more effective because of its one-stage implementa-
tion, which avoids bottlenecks between the process-
ing phases. Although slower, our results demonstrate
that Approach II still feasible to use it in real-time,
even with the use of an ensemble of classifiers.
From the implementation carried out for approach
I, it is possible to build a monitoring system that has
a robust detection and verification component. Since
the approach proved to be more efficient, not only in
terms of mAP (80.19%) but also in processing time,
reaching up to 11x faster (80 FPS) when compared
to approach II. Considering that, we believe that the
one-stage approach has a high potential for the con-
struction of an effective monitoring system that can
contribute to the safety of workers, minimizing the
number of accidents and live losses.
Regarding ID association component mentioned
in Figure 1, we believe that tracking algorithms such
as DeepSORT (Wojke et al., 2017) may present goods
results when employed along with the component ex-
plored in this work. This happens due to those al-
gorithms working well with robust detection models
to track real-time custom objects and assign unique
identities for each object.
REFERENCES
Bo, Y., Huan, Q., Huan, X., Rong, Z., Hongbin, L., Kebin,
M., Weizhong, Z., and Lei, Z. (2019). Helmet de-
tection under the power construction scene based on
image analysis. In 2019 IEEE 7th International Conf.
on Computer Science and Network Technology (ICC-
SNT), pages 67–71. IEEE.
Fang, Q., Li, H., Luo, X., Ding, L., Luo, H., Rose, T. M.,
and An, W. (2018). Detecting non-hardhat-use by
a deep learning method from far-field surveillance
videos. Automation in Construction, 85:1–9.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Advances in neural information process-
ing systems, pages 1097–1105.
Li, J., Liu, H., Wang, T., Jiang, M., Wang, S., Li, K., and
Zhao, X. (2017). Safety helmet wearing detection
based on image processing and machine learning. In
2017 9th International Conf. on Advanced Computa-
tional Intelligence (ICACI), pages 201–205. IEEE.
Nath, N. D., Behzadan, A. H., and Paal, S. G. (2020). Deep
learning for site safety: Real-time detection of per-
sonal protective equipment. Automation in Construc-
tion, 112:103085.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE conf. has on
computer vision and pattern recognition, pages 779–
788.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2015). Going deeper with convolutions.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 1–9.
Wojke, N., Bewley, A., and Paulus, D. (2017). Simple on-
line and realtime tracking with a deep association met-
ric. In 2017 IEEE international conference on image
processing (ICIP), pages 3645–3649. IEEE.
Wu, J., Cai, N., Chen, W., Wang, H., and Wang, G. (2019).
Automatic detection of hardhats worn by construction
personnel: A deep learning approach and benchmark
dataset. Automation in Construction, 106:102894.
Zheng, X., Yao, J., and Xu, X. (2019). Violation monitoring
system for power construction site. In IOP Conf. Se-
ries: Earth and Environmental Science, volume 234,
page 012062. IOP Publishing.
ICEIS 2021 - 23rd International Conference on Enterprise Information Systems
700
