
Education Support Structure for Teaching Multimodal Programming in
the Cyber-physical Space
Josef Spillner
a
Zurich University of Applied Sciences, Winterthur, Switzerland
Keywords:
Programming, Engineering, Remote Teaching, Virtual Lab, Cyber-physical Lab.
Abstract:
Programming education has become a mandatory element of many engineering curriculums, covering skills
from digitally controlled mechanical processes to intelligent traffic and aviation systems. Many of these disci-
plines require the interaction with physical devices as programming interfaces. Higher education institutions
focusing on quality presence labs with the need for occasional online teaching are thus looking for blended
and multimodal solutions in which the physical interaction can be carried over as much as possible into the
digital channels. In these solutions, various touch points between the physical and digital worlds should be
exploited. This paper contributes such a solution. It introduces a cyber-physical educational support structure
called EPOSS aimed at programming ’things’, including robots and derivative stationary and mobile units, that
works in flexible lab and online teaching combinations. The system integrates domain-specific scenarios and
open data sources for realistic autoprogramming simulations and is made available as open source prototype
to foster adoption. The usefulness of the support system is demonstrated with traffic engineering education
scenarios.
1 INTRODUCTION
Programming is widely seen as one of the key com-
petences that any engineer should be able to master
(Guo, 2013; dos Santos et al., 2018; Thode et al.,
2020). From an economic and employment perspec-
tive, this need is driven by the desire to automate pro-
cesses, to reduce operational errors, and to decom-
pose complex problems into smaller assignable tasks.
From a technology perspective, programmability in-
creasingly enters the environments of prospective en-
gineers and of society as a whole. Programming
is thus increasingly reflected in teaching to prepare
students for the life and work in a software-defined
and programmable world. To given an example, an
engineering-focused institution like the School of En-
gineering at the author’s higher-education institution
requires programming skills across all curriculums:
• Computer science: Students learn foundational
concepts of programming and apply them mostly
in the digital space (web applications, cloud-
native services, machine learning tasks) with
some physical touchpoints (computer architec-
tures, sensors).
a
https://orcid.org/0000-0002-5312-5996
• Business engineering and data science: Students
learn with emphasis on automation and apply their
skills mostly in the digital space (spreadsheets
processing, analytics over unstructured data col-
lections).
• Aviation, traffic systems, environmental sciences,
machine technology and electrical engineering:
Students are exposed to complex physical systems
and have an intrinsic interest to apply their skills
in their respective physical domain. This leads
to cyber-physical systems (e.g. programmable
car with control program) and systems of sys-
tems (e.g. transport within one city), with pro-
grammable physical ’things’ being the smallest
unit.
The importance of programming skills was not yet
widely acknowledged by most industry domains in
the mid-2010s (Prinsley and Baranyai, 2013). Conse-
quently, in the curriculums mentioned last, the acqui-
sition of competences in programming has changed
status from being nice to have to being obligatory
and highly important. However, this change has hap-
pened without the necessary support structures for ed-
ucators who need to convey characteristic real sys-
tem behaviour while being able to expose students
to these systems directly in most situations. Fail-
Spillner, J.
Education Support Structure for Teaching Multimodal Programming in the Cyber-physical Space.
DOI: 10.5220/0010446002250232
In Proceedings of the 13th International Conference on Computer Supported Education (CSEDU 2021) - Volume 2, pages 225-232
ISBN: 978-989-758-502-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
225
ure to convey with the appropriate support leads to
a reduction in attractiveness and attention, and even-
tually to reduced subjective acceptance of program-
ming exercises as integral part of studies (Santana
et al., 2018). This problem is reinforced when pro-
gramming lectures for engineers are merely copying
approaches from computer science instead of con-
sidering a domain-specific outlook on how the engi-
neers would apply programming in their future ca-
reers. Programming real ’things’ such as vehicles or
production machines could increase attention but re-
quires privileges which are not always attainable in
educational settings due to high procurement cost or
the sheer size of hardware. Furthermore, students are
not always on campus and might be physically sepa-
rated from both the ’things’ and the educators.
This problem has recently become more severe
due to forced hybrid and online teaching settings
(Oca
˜
na et al., 2020). A lot of the public de-
bate concentrated on collaboration tools for sharing
course materials and performing video calls (Klimova
and Poulova, 2014), but omitted a critical view on
pedagogic concerns specifically for applied learning
(Nortvig et al., 2020). Mobile applications and as-
sessment tools for programming education of engi-
neers are available (Ortiz et al., 2015) but likewise
do not consider physical objects. The problem rather
calls for a substitute environment in which the pro-
gramming target systems are abstracted to avoid inter-
ruptions and upheavals of the respective curriculums.
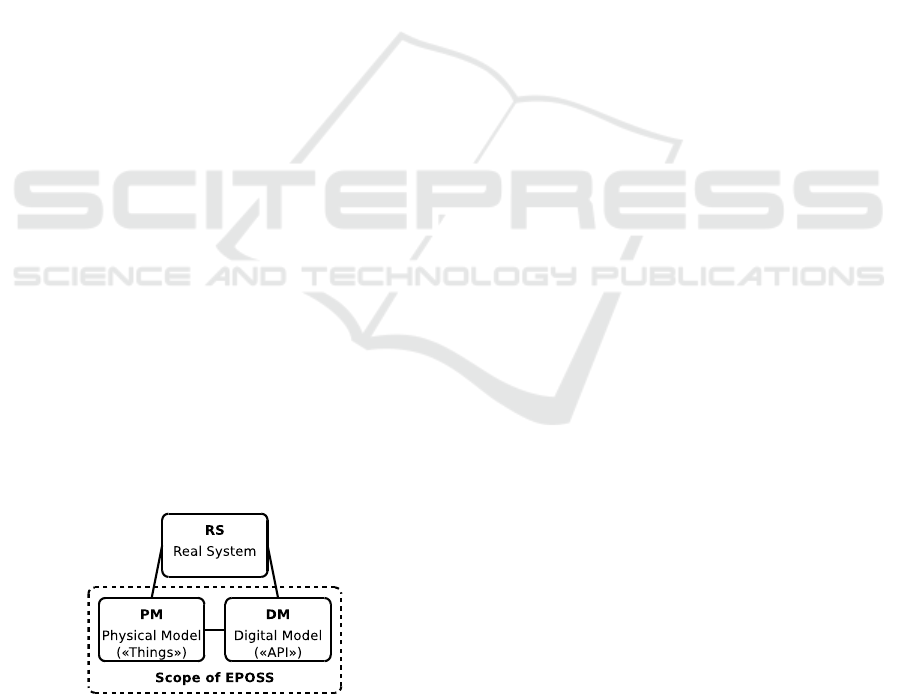
Among the suitable abstractions that can convey a
comparable set of characteristics related to the origi-
nal ’thing’ are physical and digital models. The physi-
cal models are programmable yet simplified miniature
equivalents of the actual ’things’, whereas the digi-
tal models are objects represented by an application
programming interface (API). This leads to the model
of Fig. 1 to consider as starting point for the antici-
pated educational programming and observation sup-
port structure (EPOSS).
Figure 1: Scope of the support structure among real and
model systems.
This paper thus introduces an EPOSS suitable for
programming curriculums focused on ’things’. First,
it introduces the underlying didactic concepts and
functional requirements (Sect. 2). Then, it sum-
marises existing related works aiming at similar con-
cepts (Sect. 3). Afterwards, it dives into the techni-
cal realisation. For that matter, it introduces the soft-
ware system architecture and implementation (Sect.
4) and demonstrates a concrete use case with traffic
engineering students (Sect. 5). The paper concludes
with remarks on future work (Sect. 6).
2 DIDACTIC CONCEPTS
2.1 Learning Goals and Teaching
Concepts
Learning imperative programming, the dominant
paradigm for interfacing with the physical world
(Smith, 2007), requires learning how to apply algo-
rithmic thinking and planning before proceeding to
the implementation. The planning needs to consider
all intended effects as well as unintended and unnec-
essary side effects. In the context of physical objects,
the laws of physics and various degrees of imperfec-
tion, such as loss of connectivity and unexpected la-
tency, need to be considered in addition to purely dig-
ital concerns. For instance, if a mobile robot is in-
structed to take a turn, this action might take a few
seconds during which the submission of further in-
structions might be blocked. Similarly, if a light sen-
sor shall determine the colour of an object, the light-
ing conditions in the room and the sensor quality will
effect the accuracy (Karaimer and Brown, 2018). Fur-
thermore, real damage might occur if a robot is in-
structed to move to the cliff of a table in the lab room,
and such risks might increase due to limited self-
awareness linked to restricted sensing qualities of the
hardware available in the classroom. In the orthogo-
nal context of online education, assuming the students
do not individually carry the entire physical installa-
tion to their places of living, it is important that the
consequences of any instructions remain visible and
audible immediately.
Hence, the remote teaching of physical objects
programming focuses on the following goals:
1. Combination of practical labs and demonstration
phases in which the occupancy of the ’things’
changes between educators and students.
2. Ability to determine the correctness of a program
resulting from practical labs through observation,
from both the student’s and educator’s perspec-
tive.
CSEDU 2021 - 13th International Conference on Computer Supported Education
226
3. Reasoning about the representativeness of physi-
cal and digital models for the respective engineer-
ing domain.
2.2 Modalities and Student Engagement
Students learn in supervised or unsupervised condi-
tions in on-site, hybrid or online settings with direct
or remote access to physical ’things’. Typically, in-
stitutions with hundreds of students concurrently en-
rolled in programming courses will not purchase hun-
dreds of things; rather, they would use coarse-grained
or fine-grained time sharing (Meyer and Seawright,
1970) that guarantees exclusive access and, in the case
of on-site teaching and coarse-grained time sharing,
would be implied by the course schedules. In case stu-
dents are prevented from participating on-site, there
are multiple options - students share things amongst
each other, educators parcel things to students, or an
online system is used. The first two options are im-
practical, expensive and, in the case of a pandemic,
even impossible, leaving the need for an online sup-
port structure.
When no direct access is possible, the unsuper-
vised learning might be constrained. For instance,
an educator hosting equipment in the home office
could assign time slots for students to use but might
not want to be disturbed outside of these slots, given
the movement, noise and sensing by programmable
’things’. Furthermore, moving objects typically op-
erate on battery, requiring to be placed on a charger
occasionally. While more advanced robots can return
for charging autonomously, the budget systems typ-
ically available for education require manual place-
ment. Finally, things may crash or get stuck, requiring
the manual intervention of the educator.
2.3 Support Structure
To achieve the desired educational quality, a cyber-
physical education support system following ideas
of virtual labs, but lifting those ideas to the cyber-
physical level including virtual/digital and physical
elements, shall have the following features:
1. Support for both direct and indirect (distance-
proxied) programming of things.
2. Support for partial simulation and human-in-the-
loop models to allow for complementary pro-
gramming and gap filling exercises.
3. Support for data-driven autoprogramming, i.e. the
controlled generation of instructions based on ex-
ternal open data sources that represent real sys-
tems.
4. Support for observing the effects of the program-
ming or autoprogramming, such as movement of
things, through multiple senses - visual, auditive -
also across distance if necessary.
5. Safety barriers to avoid damage on things that
results from continuous driving against a wall
and other non-intentional programming instruc-
tions. These barriers are enforced automatically
and thus also enable a certain level of self-study
without the constant interference of an educator
in the presence of mistakes.
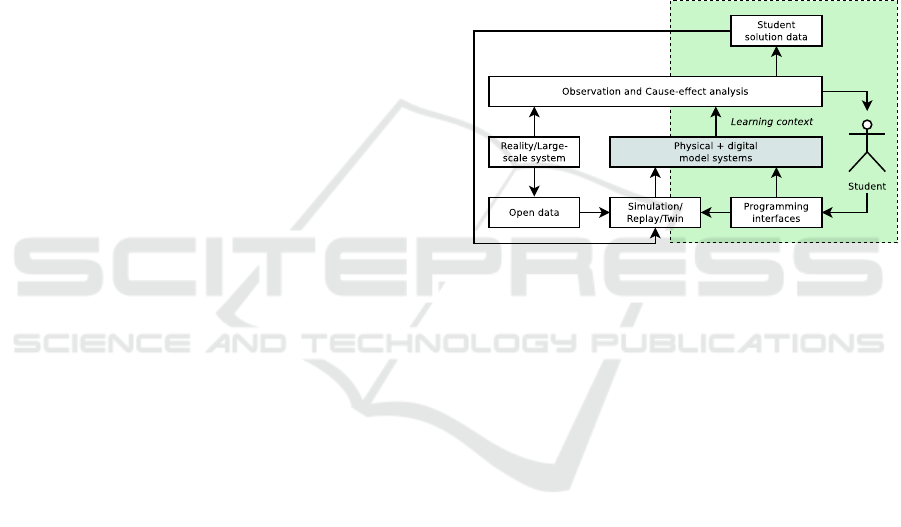
The resulting interaction between all structural
parts of the education support system, as well as the
system interfaces to the student, are shown in Fig. 2.
Figure 2: Cyber-physical education support structures from
a student perspective.
3 RELATED WORKS
Blending various forms of interacting with physical
devices is a recurring topic in education. Simulation,
virtual reality (VR) and digital twinning are among
the promising concepts. Some educators propose
to incorporate simulations for conceptual grounding,
for instance in fluid mechanics (Altuger-Genc et al.,
2018). Others propose to combine VR and simulation
to bypass physical setups while still conveying a real-
istic environment (Bolano et al., 2020). Despite being
helpful for online learning, many educators consider
it mandatory to involve actual physical behaviour due
to the absence of affordable precise simulations, due
to the higher attractiveness of tangible objects for stu-
dents, and due to better alignment between learning
modalities (Hodges et al., 2020). Such a concept
was already proposed and implemented previously in
Brazil (Almeida et al., 2017) involving multi-agent
systems, schedules and integration into a Learning
Management System (LMS). One difference to our
work is that in that system, programming commands
would be necessarily submitted through the LMS,
whereas the proposed EPOSS aims at a seamless inte-
Education Support Structure for Teaching Multimodal Programming in the Cyber-physical Space
227

gration, not requiring any forms of programming in-
teraction that differs from the physical ones. A further
difference is that the study was conducted with school
children in the age bracket of 12–17 years, whereas
the EPOSS is designed for teaching to undergraduates
and graduates with different curricular interests, not
necessarily focusing on robots but all relating to pro-
gramming, without a particular age bracket but gen-
erally being adults.
Remote, hybrid and on-site physical programming
through virtual laboratories has been proposed for in-
dustrial automation in Mexico and Spain (V
´
azquez-
Gonz
´
alez et al., 2018). It is a promising proposal but
lacks a concrete implementation. Another approach is
the modelling of cyber-physical system applications
in web browsers using high-level abstractions (Peter
et al., 2015). This approach was validated with stu-
dents attending embedded systems courses and led to
positive feedback by students. Among these related
works, none exploit network transparency to seam-
lessly combine the various presence and online teach-
ing modes.
4 SYSTEM ARCHITECTURE
AND IMPLEMENTATION
4.1 Design and Architecture
EPOSS is designed as a software system to support
all processes around physical objects programming
education. Its architecture is adapting to the modal-
ities of teaching, including on-site classrooms, hybrid
settings with reduced classroom presence, and pure
online teaching. Furthermore, it is adapting to the
level of guidance from educators, ranging from fully
guided labs and demonstrations to self-study assign-
ments.
The EPOSS architecture foresees three domains
of authority: student, lecturer/educator, and net-
work/cloud. In on-site courses, these authorities can
be combined, whereas in remote teaching they are
typically disjoint. In the cloud domain, administered
by the educator or the IT department of the respon-
sible institution, network and proxy services are op-
erated to facilitate the connection between students
and educators. Students perform requests containing
programming instructions to the proxy service which
are then executed in the educator domain that also en-
compasses the physical ’things’. Fig. 3 compares the
teaching settings.
The architecture takes security and privacy con-
cerns into account by forwarding all service requests
Figure 3: EPOSS teaching settings.
through a message queue. Hence, the educator does
not need to expose any network ports directly to the
outside world in hybrid and online teaching settings.
Furthermore, devices can be configured to register at
the proxy upon booting with a randomly generated
secret number that is spoken via voice synthesis for
two-factor authentication. This feature can be used
not only to authorise access across sites, but also to
avoid accidental or malicious takeover across class-
rooms. Only students who are nearby and listen to the
voice are thus able to control the device. Moreover, as
all interactions traverse the proxy, all programming
instructions can be recorded and later be inspected or
replayed.
4.2 Implementation
The implementation makes assumptions about the
programming language and the interfaces to ’things’
as well as the operating environment and the cov-
ered programming domains. While the implementa-
tion technologies are generally exchangeable, the fol-
lowing describes the implemented EPOSS architec-
ture that assumes the use of Python with RPC inter-
faces and the network protocols HTTP and AMQP.
The proxy-connected Python module RPyCloud is at
the centre of the solution along with the correspond-
ing RPyCloud service. It is a drop-in replacement for
the standard module RPyC used for local device pro-
gramming, making it possible to re-use programming
CSEDU 2021 - 13th International Conference on Computer Supported Education
228
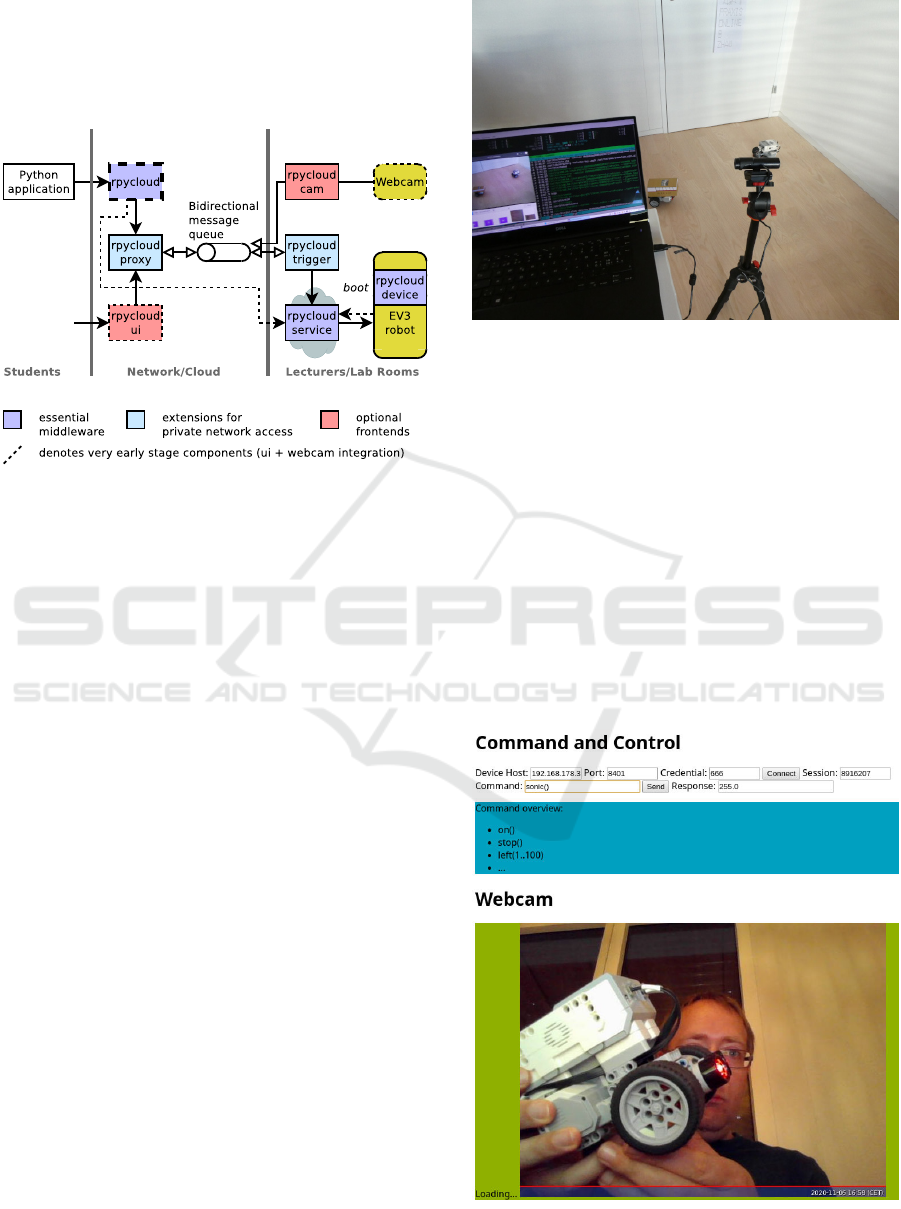
instructions without modification. The RPyCloud de-
vice code is optional; for ’things’ that do not permit
any modification, it does not have to be used at the ex-
pense of not being able to isolate the devices between
students.
Figure 4: RPyCloud architecture and implementation.
Fig. 4 shows the implementation-level architec-
ture with components spread across the three domains
of authority. The invocations that are channeled to the
service are executed on the device. Hence, for devices
requiring other forms of interactions, such as HTTP
or ROS messages, the module and the execution part
within the service need to be adjusted to maintains
the seamless substitution of standard interfaces. This
way, the education setup does not deviate significantly
from the interfaces that students will use in their ca-
reers after graduation.
An EPOSS should furthermore contain hands-on
lab examples that can be used in supervised/guided or
unsupervised/self-study settings. The implementation
therefore contains specific examples for vehicle pro-
gramming for traffic systems that are described below.
4.3 Interaction
Using the support structure for direct access to en-
force exclusive interaction with the programmable
things does not involve any special effort other than
using the RPyCloud module by students and operat-
ing the corresponding server-side infrastructure. In
contrast, remote access requires a proper setup with
cameras, microphones and other sensors so that the
senses of students get activated. Fig. 5 shows a typ-
ical physical setup using an external camera so that
students can interact with both the things and the ed-
ucator side-by-side.
Figure 5: Physical setup in classroom or educator home.
As feedback about the consequences of a pro-
gramming instruction is crucial, a web-based com-
mand and control interface is furthermore operated
and made accessible through the cloud domain. It al-
lows for connecting to a specific device and submis-
sion of individual abstractions, but can also be used in
parallel to a running program to visibly and audibly
verify the correctness and behaviour. While it enables
self-study, it can also be used interactively to perform
a discussion between student and educator. This re-
duces the need for a separate chat and video call tool
and thus reduces the cognitive load on students.
Fig. 6 shows a typical remote programming ses-
sion in which a lab instructor explains to a student
how to correct a mistake.
Figure 6: RPyCloud Web user interface.
Education Support Structure for Teaching Multimodal Programming in the Cyber-physical Space
229
5 USE CASE: CYBER-PHYSICAL
VEHICLE PROGRAMMING
Intelligent transport systems are a cornerstone of
smart cities and regions. Students of traffic systems
and traffic engineering learn about transport modal-
ities and associated concerns like logistics and inte-
grated mobility. The EPOSS is suitable for teaching
the programming of vehicle movements and transport
schedules in on-site, hybrid and remote settings. At
the author’s institution, these students learn imper-
ative, procedural and object-oriented programming
concepts over a period of two semesters in cohorts
of up to 40 students. The competences are conveyed
with the Python programming language and its di-
verse modules for interacting with the computer as
well as external systems. Hands-on programming
labs are conducted individually or in pairs and are
geared towards the students’ future work domains,
for instance intelligent and data-supported traffic sys-
tems development. While the first two weeks are re-
served for foundational theory (introducing program-
ming, language syntax), the programming of robotic
vehicles starts as early as in the third week, and in
the second semester extends to smart city scenarios
including avoidance of accidents in intermodal traffic
situations. The use of physical ’things’ aids in a more
plastic and realistic representation of these scenarios.
5.1 Vehicle Scenario Installation
Fig. 7 shows a physical model of a crossing of two
roads, deployed in the classroom in on-site or hy-
brid settings, or in the homes of students or educa-
tors in pure online teaching settings. Two model ve-
hicles with different characteristics, primarily speed
and offensive-defensive driving styles, along with
three measurement points and a number of additional
sensors and light indicators are connected to form
a crossing scenario. All vehicles and measurement
points are represented by Mindstorms EV3 robots that
fit the RPC programming model assumed by EPOSS.
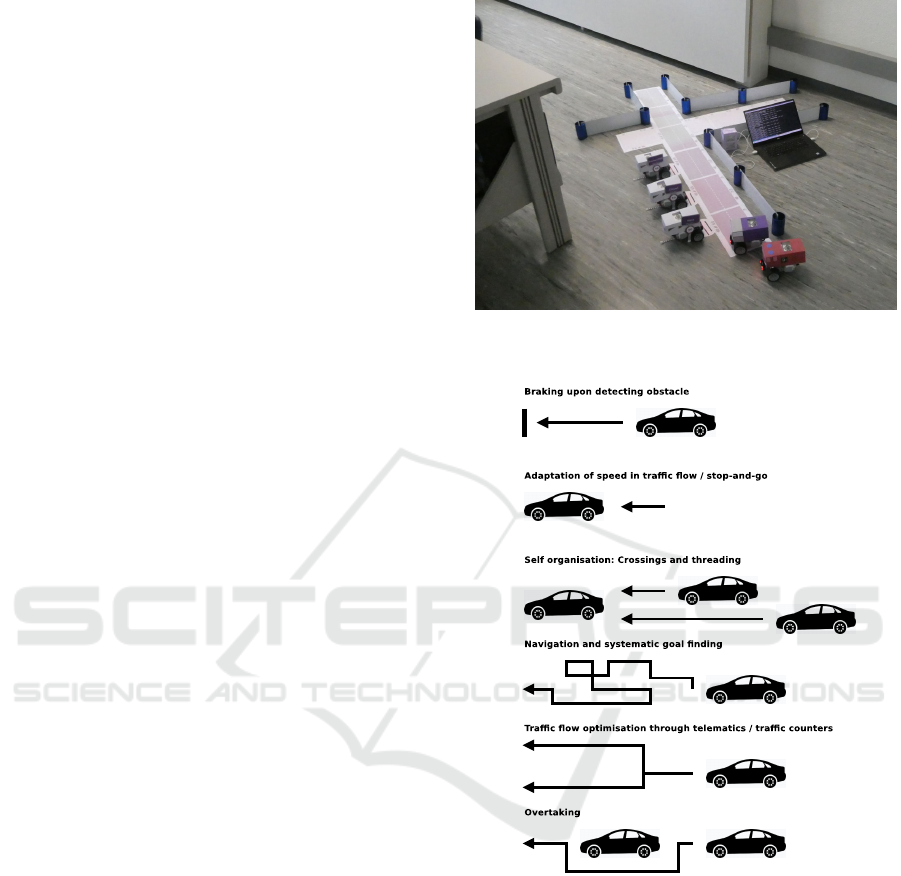
5.2 Manoeuvre Programming
To foster the mastering of algorithms involving pre-
cise temporal and spatial aspects, students can use the
EPOSS to implement traffic manoeuvres typical for
cars on roads. Educators have access to reference im-
plementations which the students can also replay on
their own account to compare their own solutions.
Fig. 8 shows the implemented scenarios involving
either one or two vehicles.
Figure 7: Traffic counting scenario with moving vehicles
and stationary sensors.
Figure 8: Vehicle manoeuvres.
The programming is non-trivial as can be exem-
plified with the overtaking manoeuvre. Overtaking
requires a stateful multi-step process. In the first step,
upon detecting a slow vehicle in front, the decision
to overtake is made by turning to the left or, in case
the vehicle robots do not permit rotations as is the
case with EV3 robots, increasing the acceleration of
the right wheel. In the second step, the sides are re-
versed to achieve a right turn. In the third step, both
sides are accelerated equally. By programming ac-
tual ’things’, limited sensor information must be con-
sidered and mistakes may lead to actual crashes that
stress the importance of safe algorithms in spite of
their complexity.
CSEDU 2021 - 13th International Conference on Computer Supported Education
230

5.3 Open Data and Autoprogramming
In order to achieve realistic scenarios, real-time traffic
data can be injected into the physical model. For this
use case, the EPOSS has been extended with access to
two systems, OTD and VDP from Switzerland. OTD
delivers planning and actual data with minute granu-
larity on public transport, whereas VDP delivers ac-
tual data with second and even subsecond granularity
on road vehicles. Both systems intersect when public
transport is using the road, in particular buses.
Fig. 9 shows the general concept of injecting
and replaying open data in the physical model. It is
not only increasing the attractiveness for students due
to the stronger link between model and real system.
Rather, it also allows for reasoning about the precision
of all system components ranging from real system
sensing over physical movement and sensing in the
physical model to digital data processing of all sen-
sor data and programming instructions. This exposes
students to the open research problem of achieving
absolute synchrony, represented by the same deltas
between measurements in both systems, and can lead
to follow-up engagement in project works on tackling
parts of this problem.
Figure 9: Replaying data captured from real systems in
model systems.
Fig. 10 shows how the movement of a sched-
uled train visible in the background is projected in
seemingly perfect synchrony to the movement of a
model train. This aspect is particularly intriguing and
attractive for students who understand the complex-
ities of traffic planning. In this case, as OTD only
delivers minute granularity, the students have to per-
form statistical measurements to calculate movement
drifts and reason about increasing the precision and
predictability in mobility.
5.4 Student Feedback
EPOSS is work in progress and was only used in a
pilot setting in the first of two semesters with traf-
fic engineers. It was not yet evaluated in other engi-
neering domains. Hence, only basic vehicle manoeu-
vres such as drawing a circle or a square with ap-
propriate movement sequences were taught with the
support structure. The flexibility in settings proved
Figure 10: Autoprogramming of a model train with OTD
from a real train.
to be an advantage, as the teaching started in hybrid
mode (with on-site and remote groups taking turns)
and later switched to pure online mode. Accordingly,
the physical installation was migrated from the class-
room to the educator home office, without any work
difference for those students who were previously in
the remote groups. The general perception of the sys-
tem was positive and the interaction worked well, al-
though the participants look forward to enhancements
such as self-reservation for unsupervised program-
ming. Compared to a classroom, the supervised 1:1
sessions were considered especially helpful in case
of problems like stuck cars that could quickly be re-
solved by the intervention of the educator.
6 CONCLUSIONS
EPOSS is a digital support system for educational
needs related to programming and observing physi-
cal objects or ’things’. It is implemented based on
a distributed computing architecture and proven to
work in on-site, hybrid and remote teaching of traf-
fic engineering students. The focus of the work was
on the technical enablement. Therefore, it lacks em-
pirical validation over multiple semesters. This task
is left for future work from a scientific work angle.
To extend EPOSS to other study courses, the phys-
ical scenery could be extended to support multiple
cameras and ground materials (useful for machine
technology students) as well as cranes and other lo-
gistics equipment (useful for business process stu-
dents). Specifically for traffic engineering students,
intermodal logistics scenarios including handover of
goods and enhancement with simulation to learn the
behaviour of complex systems and scale could be re-
alised. These extensions are left as further future work
from an applied education angle.
Education Support Structure for Teaching Multimodal Programming in the Cyber-physical Space
231

EPOSS AVAILABILITY
EPOSS is made available as open source software
package, consisting of the central RPyCloud system,
traffic demonstration scenarios and other necessary
parts to replicate it in other education institutions. A
snapshot is published on Zenodo
1
while further de-
velopment is encouraged on GitHub
2
.
ACKNOWLEDGEMENTS
This work is supported by a DIZH Fellowship un-
der grant Smart Cities and Regions Services Enable-
ment (SCReSE). The material is further based upon
work supported by Google Cloud, with GCP Re-
search Credits for Serverless Data Integration.
REFERENCES
Almeida, T. O., de Magalh
˜
aes Netto, J. F., and Rios, M. L.
(2017). Remote robotics laboratory as support to
teaching programming. In 2017 IEEE Frontiers in Ed-
ucation Conference, FIE 2017, Indianapolis, IN, USA,
October 18-21, 2017, pages 1–6. IEEE Computer So-
ciety.
Altuger-Genc, G., Han, Y., and Genc, Y. (2018). To-
wards simulation aided online teaching: Material de-
sign for applied fluid mechanics. Int. J. Online Eng.,
14(12):112–125.
Bolano, G., R
¨
onnau, A., Dillmann, R., and Groz, A. (2020).
Virtual reality for offline programming of robotic ap-
plications with online teaching methods. In 17th
International Conference on Ubiquitous Robots, UR
2020, Kyoto, Japan, June 22-26, 2020, pages 625–
630. IEEE.
dos Santos, M. T., Vianna Jr, A. S., and Le Roux, G. A.
(2018). Programming skills in the industry 4.0: are
chemical engineering students able to face new prob-
lems? Education for Chemical Engineers, 22:69–76.
Guo, P. (2013). Why Scientists and Engineers Must Learn
Programming. Communications of the ACM Blog.
Hodges, S., Sentance, S., Finney, J., and Ball, T. (2020).
Physical computing: A key element of modern com-
puter science education. Computer, 53(4):20–30.
Karaimer, H. C. and Brown, M. S. (2018). Improving color
reproduction accuracy on cameras. In 2018 IEEE
Conference on Computer Vision and Pattern Recog-
nition, CVPR 2018, Salt Lake City, UT, USA, June 18-
22, 2018, pages 6440–6449. IEEE Computer Society.
1
EPOSS snapshot: https://doi.org/10.5281/zenodo.
4547808
2
EPOSS development: https://github.com/
serviceprototypinglab/eposs
Klimova, B. F. and Poulova, P. (2014). Pedagogical issues
of online teaching: Students’ satisfaction with on-
line study materials and their preferences for a certain
type. In Cao, Y., V
¨
aljataga, T., Tang, J. K. T., Leung,
H., and Laanpere, M., editors, New Horizons in Web
Based Learning - ICWL 2014 International Work-
shops, SPeL, PRASAE, IWMPL, OBIE, and KMEL,
FET, Tallinn, Estonia, August 14-17, 2014, Revised
Selected Papers, volume 8699 of Lecture Notes in
Computer Science, pages 187–194. Springer.
Meyer, R. A. and Seawright, L. H. (1970). A virtual ma-
chine time-sharing system. IBM Syst. J., 9(3):199–
218.
Nortvig, A., Petersen, A. K., Helsinghof, H., and Bræn-
der, B. (2020). Digital expansions of physical learning
spaces in practice-based subjects - blended learning in
art and craft & design in teacher education. Comput.
Educ., 159:104020.
Oca
˜
na, J. M., Urrutia, E. K. M., P
´
erez-Mar
´
ın, D., and
Pizarro, C. (2020). Can a learning companion be
used to continue teaching programming to children
even during the COVID-19 pandemic? IEEE Access,
8:157840–157861.
Ortiz, O., Alcover, P. M., S
´
anchez, F., Pastor, J. A., and
Herrero, R. (2015). M-learning tools: The develop-
ment of programming skills in engineering degrees.
Rev. Iberoam. de Tecnol. del Aprendiz., 10(3):86–91.
Peter, S., Momtaz, F., and Givargis, T. (2015). From the
browser to the remote physical lab: Programming
cyber-physical systems. In 2015 IEEE Frontiers in
Education Conference, FIE 2015, El Paso, TX, USA,
October 21-24, 2015, pages 1–7. IEEE Computer So-
ciety.
Prinsley, R. T. and Baranyai, K. (2013). STEM skills in the
workforce: what do employers want? Office of the
Chief Scientist.
Santana, B. L., Figuer
ˆ
edo, J. S. L., and Bittencourt, R. A.
(2018). Motivation of engineering students with
a mixed-contexts approach to introductory program-
ming. In IEEE Frontiers in Education Conference,
FIE 2018, San Jose, CA, USA, October 3-6, 2018,
pages 1–9. IEEE.
Smith, A. C. (2007). Using magnets in physical blocks that
behave as programming objects. In Ullmer, B. and
Schmidt, A., editors, Proceedings of the 1st Interna-
tional Conference on Tangible and Embedded Inter-
action 2007, Baton Rouge, Louisiana, USA, February
15-17, 2007, pages 147–150. ACM.
Thode, E., Schleiter, A., and da Silva Zech, G. (2020).
Digitalization permeates the entire working world –
Eight in 10 German Occupations Now Demand Digi-
tal Skills. Study by Burning Glass Technologies and
Bertelsmann Stiftung.
V
´
azquez-Gonz
´
alez, J. L., Barrios-Aviles, J., Mu
˜
noz, A. R.,
and Palomares, R. A. (2018). An industrial automa-
tion course: Common infrastructure for physical, vir-
tual and remote laboratories for PLC programming.
Int. J. Online Eng., 14(8):4–19.
CSEDU 2021 - 13th International Conference on Computer Supported Education
232
