
Detecting Message Modification Attacks on the CAN Bus with Temporal
Convolutional Networks
Irina Chiscop
1 a
, Andr
´
as Gazdag
2 b
, Joost Bosman
1 c
and Gergely Bicz
´
ok
2 d
1
Cyber Security & Robustness Department, TNO, The Hague, The Netherlands
2
CrySyS Lab., Dept. of Networked Systems and Services, Budapest University of Technology and Economics,
Budapest, Hungary
Keywords:
Vehicle Security, Intrusion Detection, Controller Area Network, Machine Learning, Temporal Convolutional
Networks.
Abstract:
Multiple attacks have shown that in-vehicle networks have vulnerabilities which can be exploited. Securing
the Controller Area Network (CAN) for modern vehicles has become a necessary task for car manufacturers.
Some attacks inject potentially large amount of fake messages into the CAN network; however, such attacks
are relatively easy to detect. In more sophisticated attacks, the original messages are modified, making the de-
tection a more complex problem. In this paper, we present a novel machine learning based intrusion detection
method for CAN networks. We focus on detecting message modification attacks, which do not change the
timing patterns of communications. Our proposed temporal convolutional network-based solution can learn
the normal behavior of CAN signals and differentiate them from malicious ones. The method is evaluated on
multiple CAN-bus message IDs from two public datasets including different types of attacks. Performance
results show that our lightweight approach compares favorably to the state-of-the-art unsupervised learning
approach, achieving similar or better accuracy for a wide range of scenarios with a significantly lower false
positive rate.
1 INTRODUCTION
A modern automobile contains more than 100 elec-
tronic control units (ECU) to control the vehicular
subsystems and help the driver with various sophis-
ticated services. These ECUs are spread over the en-
tire vehicle and connected mostly via Controller Area
Networks (CANs). CAN was initially designed to
be an isolated system decades ago, however, in the
age of round-the-clock connected networked objects,
this property no longer holds. Realizing the afore-
mentioned connectivity, Bluetooth, Wi-Fi, or cellu-
lar connections are all potential intrusion points for
an attacker. If a malicious actor compromises a
component
1 ,2
that implements one of these connec-
tions, it becomes possible to manipulate the CAN net-
a
https://orcid.org/0000-0002-1249-8518
b
https://orcid.org/0000-0002-4481-3308
c
https://orcid.org/0000-0001-6325-1462
d
https://orcid.org/0000-0002-3891-3855
1
www.wired.com/2015/07/hackers-remotely-kill-jeep-high
way
2
www.wired.com/story/tesla-model-x-hack-bluetooth
work. Dashboard information is displayed and ctua-
tors in Advanced Driver-Assistance Systems (ADAS)
are controlled based on sensor readings transmitted
over the CAN bus; interfering with these messages
may result in significant financial loss and danger to
human life.
Two approaches have so far been seen among the
attacks. Existing attacks are of two distinct types: (i)
the attacker either injects additional CAN messages
into the network or (ii) she modifies otherwise valid
messages sent by legitimate ECUs. We note that the
latter attack is very difficult to implement by altering
electrical signals of the CAN on-the-fly, yet it can be
realized by compromising an ECU and sending out
messages with modified content, or by compromising
a gateway between two CAN networks and modify-
ing messages passing through it (Gazdag et al., 2020).
Message injection attacks can be detected easily be-
cause the original messages are also present next to
malicious ones, which changes the temporal patterns
of traffic. On the other hand, detecting modification
attacks poses a tougher challenge: it requires an in-
depth analysis of the actual payload as the rest of the
488
Chiscop, I., Gazdag, A., Bosman, J. and Biczók, G.
Detecting Message Modification Attacks on the CAN Bus with Temporal Convolutional Networks.
DOI: 10.5220/0010445504880496
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 488-496
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

traffic properties remain intact in this scenario.
Related Work. In recent years, a considerable
amount of literature has been published on CAN
bus intrusion detection. These works can be split
into three categories: frequency-, statistics-, or ma-
chine learning based methods. Most of these ap-
proaches are particularly useful for detecting cyber-
attacks in which additional messages are being in-
jected into the CAN bus. The simplest of the three,
frequency-based models focus on testing inter-arrival
times of CAN messages against a predefined nor-
mal baseline (Taylor et al., 2015; Song et al., 2016;
Moore et al., 2017; Gazdag et al., 2019). As the
name suggests, statistics-based detection approaches
exploit the statistical properties of CAN bus traf-
fic such as entropy (Muter and Asaj, 2011), Z-score
(Tomlinson et al., 2018) or Mahalanobis distance (Mo
et al., 2019). Machine learning based methods im-
ply the usage of artificial neural networks, clustering
and supervised models for classification and regres-
sion. In the specific field of CAN bus intrusion de-
tection, popular machine learning approaches include
autoencoders (Lokman et al., 2019; Lin et al., 2021;
Novikova et al., 2020), recurrent neural networks
(RNN) such as Long Short-Term Memory (LSTM)
networks (Taylor et al., 2016; Negi et al., 2019;
Khan et al., 2020; Hanselmann et al., 2020; Hossain
et al., 2020), Gated Recurrent Unit (GRU)-based net-
works (Kukkala et al., 2020), replicator neural net-
works (Weber et al., 2018), and deep convolutional
networks (Song et al., 2020). The scrutinized liter-
ature shows that recurrent architectures are often the
preferred choice for modeling the time series of CAN
bus signals, whilst convolutional networks are used
when data is transformed to a two-dimensional grid
dataframe to resemble an image format (Song et al.,
2020). In particular, only one approach was found to
combine these two techniques in the form of a convo-
lutional LSTM (Tariq et al., 2020) which is trained on
labeled data in a supervised fashion.
Temporal Convolutional Networks. To the best of
our knowledge, no existing solution employs (causal)
convolutions to model the time series representation
of CAN signals; we argue that such an approach
makes perfect sense given the successful applica-
tion of convolutional networks to sequence modeling
tasks. Specifically, a Temporal Convolutional Net-
work (TCN) is a type of convolutional network whose
architecture consists of causal (and dilated) convolu-
tions (Bai et al., 2018). It has been shown that this
new type of network outperforms recurrent architec-
tures, such as LSTM and GRU, on a multitude of
sequence modeling tasks including the adding prob-
lem and image classification on sequential MNIST
and P-MNIST (Bai et al., 2018). In fact, TCNs have
also been successfully applied to anomaly detection
in general time series data (He and Zhao, 2019).
Our Contribution. In this paper, we propose a TCN-
based approach for detecting modified CAN bus mes-
sages; our focus is solely on message modification at-
tacks with no message injection. We construct and
train the TCN in an unsupervised fashion, since, in
practice, labelling CAN bus messages is a very dif-
ficult task. In the training process, the TCN will
learn to accurately reconstruct the signals of individ-
ual CAN bus messages through its causal convolution
layers, which allows for information retention from
past data samples. Finally, the classification of new
data samples will resume to setting an appropriate
threshold on their reconstruction loss value. The core
idea here is that signals whose data have been altered
will be poorly reconstructed by the model, and thus be
easy to recognize. Note, that it is not a prerequisite for
us to know CAN bus signal semantics which varies
for vehicle make and model, and is usually kept con-
fidential (Lestyan et al., 2019; Remeli et al., 2019).
The contribution of this paper is three-fold:
1. We first introduce a new CAN bus dataset contain-
ing both benign data and synthetic attacks.
2. We then propose a TCN architecture to learn and
reconstruct the normal behaviour of CAN bus sig-
nals, and use this information to pinpoint anoma-
lies that do not conform to the reconstruction
given by model.
3. We compare the detection performance of
our approach to a state-of-the-art GRU-
autoencoder (Kukkala et al., 2020) (shown
to outperform other existing solutions) through
numerical experiments on both our own dataset
and the de facto standard SynCAN dataset
(Hanselmann et al., 2020). Results show that our
simple TCN-based approach compares favorably
to the state-of-the-art, i.e., it achieves similar or
better accuracy with a significantly lower false
positive rate.
Paper Structure. The rest of the paper is structured
as follows. Section 2 presents our proposed TCN ar-
chitecture in detail. Section 3 describes the design of
our experiments including choosing the baseline, in-
troducing our two datasets and the training process,
and defining evaluation metrics. Section 4 presents
the results of the comparative performance evalua-
tion. Finally, Section 5 concludes the paper.
Detecting Message Modification Attacks on the CAN Bus with Temporal Convolutional Networks
489

2 INTRUSION DETECTION
MODEL
In this section we present the motivation behind
choosing temporal convolutional networks as an in-
trusion detection mechanism for the CAN bus. We
first provide some background on convolutional net-
works and then describe our proposed TCN architec-
ture in detail.
2.1 Convolutional Networks
Convolutional neural networks are a particular kind
of deep neural networks that enables the extraction
of relevant spatial and temporal features from the in-
put (e.g., an image) by learning a set of filters. These
filters represent multi-dimensional arrays sliding over
the input image, and are initialized randomly. During
the forward pass, the dot product between the entries
of each filter and the image sub-block is computed,
resulting in a feature map. When another convolu-
tional layer is added, the features learned in the first
layer are combined to create new ones. To account for
as many (non-linear) combinations of features as pos-
sible, it is customary to increase the filter size in the
subsequent layers. The deeper the network becomes,
the better it gets at extracting refined patters from the
data. A more detailed description of different convo-
lutional architectures can be found in (Aloysius and
Geetha, 2017).
Temporal convolutional networks (TCN) are a cat-
egory of convolutional networks particularly suitable
for modeling long-term dependencies in sequential
data (van den Oord et al., 2016; Bai et al., 2018). Con-
sider for instance the following task: based on input
sequence x
0
, x
1
, . . . , x
T
, predict corresponding output
y
0
, y
1
, . . . , y
T
at each time step. There are two con-
straints associated with this task. First, the predicted
output y
t
should only be influenced by previously ob-
served inputs x
0
, x
1
, . . . , x
t
, and, second, the size of the
network output must be identical to that of the input
sequence. TCNs tackle the first constraint by slid-
ing a filter only over the past input values. In other
words, the convolution filter has positive weights only
for past inputs. TCNs also employ dilated causal con-
volutions which, unlike regular causal convolutions,
enable an exponential growth of the receptive field by
skipping over the inputs while convolving. Moreover,
a larger receptive field allows the neural network to
infer the relationships between different observations
in the input data. The second constraint is addressed
by padding the input data with zeros at the borders, to
control the dimension of the output. These two archi-
tectural elements can be observed in Figure 1, depict-
ing a dilated causal convolutional network with two
hidden layers. Here, the zero-padding is represented
by the white squares on the left side. The filter size of
k = 3 is indicated by the blue lines. The dilation fac-
tor d, applied at each layer, indicates how many input
values are being skipped by the filter. Increasing the
dilation factor by 2 at each subsequent layer results in
a receptive field of size 15: the value of a neuron in
the output layer is influenced by fifteen neurons from
the input layer.
Figure 1: A dilated causal convolutional neural network
with two hidden layers, dilation factors d = 1, 2, 4 and filter
size k = 3 (Bai et al., 2018).
TCNs possess numerous advantages when com-
pared to recurrent architectures (Bai et al., 2018).
Convolutions within TCNs can be computed in par-
allel, thus allowing the entire data sequence to be
processed. That is not possible with RNNs, where
the computation of the output at a specific timestep
requires the complete computation of all its prede-
cessors. Moreover, TCNs require less memory dur-
ing training than RNNs, where partial values of cell-
gates need to be stored, and exhibit stable gradients,
as backpropagation does not happen through multiple
different time samples. In theory the receptive field
of RNNs is infinite; in TCNs the field is finite, and its
size depends on the number of layers (dilations) and
filters used. Apparently, there exists a trade-off be-
tween how lightweight the network is, and its ability
to capture long-term dependencies in the data. Both
aspects are equally important to obtain a scalable and
reliable CAN bus intrusion detector. In the remainder
of this paper we show that a TCN model is a suitable
candidate for this purpose.
2.2 TCN Architecture
The TCN to be used for CAN bus intrusion detection
follows the general framework from (Bai et al., 2018)
and is shown in Figure 2. The network consists of an
input layer, three residual blocks, and an output layer.
As shown in the figure, the input for the TCN must be
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
490
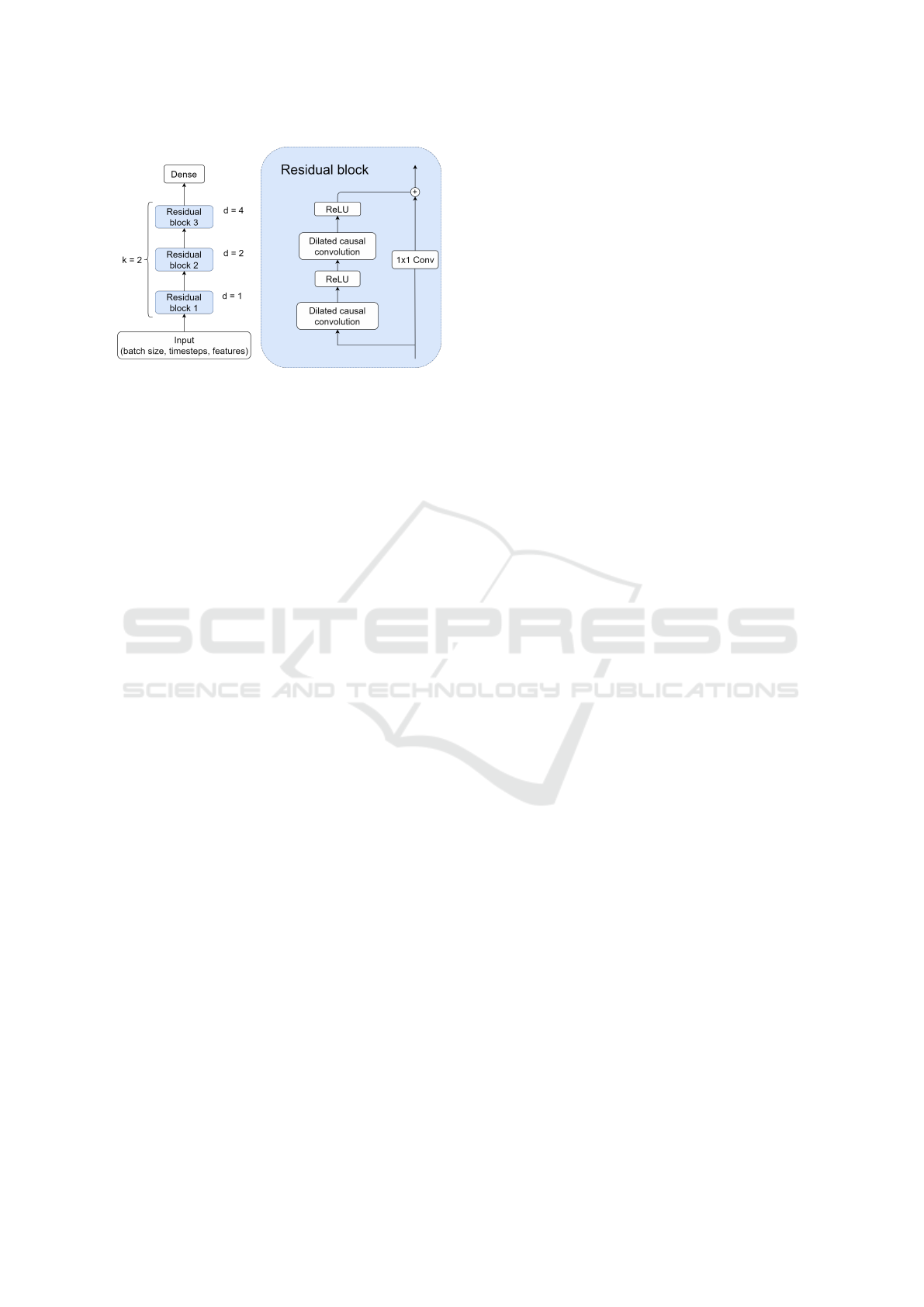
Figure 2: Our TCN architecture with three residual blocks
with convolutional dilations and filter size of k = 2.
three-dimensional. Each residual block contains two
dilated causal convolution layers each having 64 fil-
ters and the same dilation factor d. The Rectified Lin-
ear Unit (ReLU) is used as an activation function on
these layers. The filter size is kept at the same value
of k = 2 across all residual blocks. A skip connection
is also enabled, which adds the output from the pre-
vious layer to the next layer. This is marked by the
element-wise addition ⊕. Due to zero-padding, this
operation may receive inputs that differ in shape. To
circumvent this, a 1x1 convolution is added.
The network is kept simple deliberately: no
weight normalization or dropout layers have been
used. Our main objective here is to investigate
whether this lightweight TCN can successfully learn
to reconstruct CAN bus signals, and achieve results
comparable to or better than other, more complex
state-of-the-art classifiers.
2.3 Intrusion Score and Output
We distinguish between benign and malicious mes-
sages by applying a threshold to the reconstruction
loss. We therefore monitor the squared error between
the signal value at a given times and its latest recon-
structed value. This defines an intrusion score for
each signal in a message. To compute an intrusion
score per message, we calculate a set of thresholds
given by the 99.9th percentile of the validation loss
for each signal in the data. A message is then labeled
as malicious if one of the signal’s intrusion scores ex-
ceeds the threshold set for that signal. We opted for
this approach to label messages based on individual
signal thresholds: in practice, depending on the com-
plexity and correlation of the signals, some may be
better reconstructed during training than others.
3 EXPERIMENT DESIGN
In this section we describe the design of our numerical
experiments, including the baseline model, datasets,
training process and our choice of evaluation metrics.
3.1 Selecting the Most Suitable Baseline
For evaluation purposes, we identified the best-
performing CAN bus anomaly detection algorithms
by scrutinizing recent literature. We used the follow-
ing selection criteria:
• Unsupervised learning: the algorithm requires no
labeled data for training.
• Generalization: the algorithm is easy to gener-
alize, and thus does not depend on data pre-
processing such as identifying and pre-selecting
specific CAN signals.
• Fully-reproducible: the algorithm needs to be ac-
companied by sufficient information in order to
have a fully reproducible implementation.
To the best of our knowledge, the most recent and
suitable candidate is the INDRA framework (Kukkala
et al., 2020). It proposes a recurrent autoencoder net-
work that is able to detect CAN messages in which
signals have been tampered with. For each message
ID one such recurrent autoencoder is trained such that
it learns to reconstruct the signals within that partic-
ular message ID. This approach is shown to outper-
form other recent unsupervised methods such as Pre-
dictor LSTM (Taylor et al., 2015), Replicator Neural
Network (Weber et al., 2018), and CANet (Hansel-
mann et al., 2020), on most attack classes of the Syn-
CAN dataset, in terms of accuracy and false positive
rate. Moreover, Predictor LSTM is designed to pre-
dict the raw message data in string form, and thus
does not directly fall within the scope of time-series-
based intrusion detection. Note that the CANet model
is also more complex since its architecture combines
the LSTM models of individual messages to account
for capturing the correlations between different IDs.
Finally, the convolutional LSTM proposed in (Tariq
et al., 2020) is a promising method for predicting
multi variate time series data. However, it was de-
signed for supervised learning which requires labeled
data for training and for this reason, it falls outside the
scope of this paper.
In view of these arguments, INDRA is the most
sensible baseline for comparative performance evalu-
ation.
Detecting Message Modification Attacks on the CAN Bus with Temporal Convolutional Networks
491

3.2 Datasets
When evaluating machine learning classifiers, it is
considered best practice to employ multiple datasets
in order to assess the impact of the number of data
samples and different features on the model’s per-
formance. Moreover, publicly available CAN bus
datasets for intrusion detection are labelled differ-
ently, either per message ID or per signal. To ac-
count for both, we consider two datasets: the Syn-
CAN dataset with message labels and the CrySyS
dataset with individual signal labels.
3.2.1 SynCAN Dataset
The SynCAN (Synthetic CAN Bus Data) dataset was
introduced in (Hanselmann et al., 2020), and is pub-
licly available
3
. The dataset contains 10 different
CAN message IDs, whilst the number of signals in
each ID varies between 1 and 4. Overall, the dataset
covers 20 correlated signals. The training data spans
approximately 16.5 hours of traffic, while the testing
data about 7.5. Moreover, testing data includes a 0/1
label per individual message, to indicate whether it is
malicious or not. However, there is no indication as
to which signal has been attacked within a malicious
message. Since this dataset is only meant for unsu-
pervised learning purposes, the training data does not
include explicit labels. Finally, the test data is split
across six different files, each corresponding to a dif-
ferent simulated attack:
• Plateau Attack: the value of a single signal is
overwritten by a constant value over a certain pe-
riod of time.
• Continuous Change Attack: the value of a signal
is overwritten at a slow pace, such that it increas-
ingly deviates from its true value.
• Playback Attack: the values of a signal within a
time interval is overwritten with the values of the
same signal from a randomly selected past inter-
val.
• Suppression Attack: signal values contained in a
certain message ID simply do not appear in the
CAN traffic for a period of time.
• Flooding Attack: messages with a certain ID are
sent with a higher frequency to the CAN bus.
Detection of message injection attacks (suppres-
sion attack and flooding attack) is not a goal of this
paper. Nonetheless, in Section 4, we evaluated our
TCN architectures performance on those as well for a
better comparison with the INDRA model.
3
www.github.com/etas/SynCAN
3.2.2 CrySyS Dataset
The CrySyS dataset was created by the CrySyS Lab in
the context of the SECREDAS project
4
, and it is also
publicly available
5
. It is significantly smaller com-
pared to the SynCAN dataset, however, the driving
environment and the behavior of the vehicle are bet-
ter known. It contains 7 smaller (<1 minute) captures
of specific driving and traffic scenarios, and a longer
trace (~25 minutes). There are 20 different message
IDs in the traces, and the number of signals varies be-
tween 1 and 6.
Additionally, to complement this dataset, we have
developed a signal extractor and an attack generator
script. The signal extractor is based on the work pre-
sented in (Stone et al., 2018). It calculates the statis-
tical properties of bits in CAN data fields, and identi-
fies and separates the signals based on the changes in
these values.
The attack generator
6
is able to modify the CAN
messages. It changes some or all the values in the data
field of existing messages without modifying the tim-
ing of a message. To achieve a meaningful targeted
attack, the generator can be combined with the infor-
mation gathered from the signal extractor to modify
specific signals in the trace. The attack generator also
supports multiple attack types:
• Change to Constant: the original value is replaced
by the given constant value.
• Change to Random: the original value is replaced
by a new random value.
• Modify with Delta: the given value is added to the
original data value.
• Modify with Increment: a per message increment
is added to the original value.
• Modify with Decrement Value: a per message
decrement is subtracted from the original value.
• Change to Increment: the original data value is
replaced by a per message incremented value.
• Change to Decrement: the original data value is
replaced by a per message decremented value.
We modified the original CrySyS traces with the
attack generator script to simulate attacks. After we
identified the different signals in the traces we re-
placed a chosen signal with a constant value for the
second half of the trace. Note that this simple change-
to-constant/plateau attack was enough to demonstrate
the capabilities of our approach over INDRA (see
4
www.secredas-project.eu
5
www.crysys.hu/research/vehicle-security
6
www.github.com/CrySyS/can-log-infector
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
492

Table 1: Overview of datasets used in the numerical exper-
iments.
Dataset Message ID
No. of
signals
Train
samples
Test
samples
SynCAN
2 3 4139826 909869
3 2 2070144 1884235
10 4 1380087 610294
CrySyS
280 4 157472 3895
290 5 15748 389
Section 4). Also note that we focused on IDs with
1 to 4 signals per message, similar to SynCAN, to be
able to compare the results across the two datasets.
3.3 Training the Models
Training both the TCN and INDRA models required
the normalization of signal data (values between 0
and 1), and then re-shaping the input data to three-
dimensional. This was done by sliding a fixed-size
window over the time series, one timestamp at a time.
As in (Kukkala et al., 2020), we applied a rolling win-
dow of 20 timestamps or, equivalently, of 20 mes-
sages, to the training datasets shown in Table 1.
The rest of the training parameters were set to the
same values as in (Kukkala et al., 2020) to ensure
an accurate reproduction of the INDRA model. Con-
cerning the optimizer and loss function, both models
used the Adam optimizer with learning rate 0.0001
and mean square error. The models were trained
for 100 epochs with a batch size of 128 on 85% of
the training data, whilst the other 15% was kept for
validation. An early-stop mechanism terminated the
training if the validation loss did not improve in the
last 10 epochs. Note that during initial experiments,
a higher number of epochs was considered, but the
training stopped before the 100th epoch in all cases.
All models were implemented using the keras and
keras-tcn
7
libraries in Python 3.7, and trained on a
GeForce GTX 960 GPU. The two models have only
been trained offline, not on live CAN bus data.
3.4 Evaluation Metrics
To evaluate the performance of the TCN model, we
use the intrusion score defined in Section 2.3. The
INDRA model uses the same squared error as a sig-
nal intrusion score, but applies a generic threshold set
to the 99.9th percentile of the validation loss (com-
puted across all signals). The message intrusion score
is then given by the maximum signal intrusion score
contained in that message, and is then compared to the
threshold. We use three standard performance metrics
7
www.github.com/philipperemy/keras-tcn
for the evaluation of the models: accuracy, false pos-
itive rate and precision. Accuracy measures the ratio
of the predicted labels exactly matching the ground
truth, and is defined as follows:
Accuracy =
T P + T N
T P + FP + T N + FN
, (1)
where T N, T P, FN, FP denote the number of true,
and false, positives and negatives, respectively. Accu-
racy gives an indication of the general classification
capabilities of a certain model.
The false positive rate (FPR) measures the amount
of samples wrongly classified as malicious, whilst in
fact being benign. The false positive rate is extremely
relevant from the practical point of view: in the CAN
bus context, the messages marked as malicious may
need to be further analyzed before deciding on mitiga-
tion actions. To keep operation efficient, the false pos-
itive rate needs to be minimized as much as possible.
Precision, on the other hand, measures the capabili-
ties of the model to actually detect the relevant attacks
(positive samples). This is another important quantity
to monitor since imbalanced datasets, with far more
negatives than positives, may render accuracy a de-
ceiving metric. In fact, CAN bus datasets are usu-
ally imbalanced, since most (simulated) attacks have
a very short duration. The FPR and precision are de-
fined as follows:
FPR =
FP
T N + FP
, (2)
Precision =
T P
T P + FP
. (3)
4 RESULTS
SynCAN. We first assessed the performance of the
two models on the SynCAN dataset. The accuracy
and false positive rate, calculated for the normal test
set and for each attack class, are shown in Table 2. A
first observation is that TCN achieves a higher accu-
racy than INDRA in most cases, with the exception
of playback and flooding attacks on ID 10. Moreover,
the false positive rates are quite low for both models,
which can be explained by looking at the precision
values in Table 3. Overall, there are large variations
in the precision values across different message IDs
which may be related to how the attacks were per-
formed (target signals chosen, attack duration, etc.)
and the different signal correlations. Also, the rela-
tively low precision values in Table 3 show that the
models manage to capture only a limited set of tem-
poral characteristics of the SynCAN data. This is a
Detecting Message Modification Attacks on the CAN Bus with Temporal Convolutional Networks
493
Table 2: Results for the SynCAN dataset.
Normal Continuous Playback Flooding Suppress Plateau
Model Data Acc. FPR Acc. FPR Acc. FPR Acc. FPR Acc. FPR Acc. FPR
TCN
ID 2
0.9977 0.0022 0.8660 0.0018 0.8674 0.0013 0.7678 0.0026 0.8402 0.0001 0.8336 0.0066
INDRA 0.9811 0.0188 0.8584 0.0121 0.8660 0.0046 0.7600 0.0157 0.8347 0.0101 0.8133 0.0495
TCN
ID 3
0.9992 0.0007 0.8664 0.0009 0.8680 0.0002 0.6422 0.0011 0.8390 0.0004 0.8394 0.0012
INDRA 0.9965 0.0034 0.8653 0.0033 0.8672 0.0012 0.6420 0.0033 0.8377 0.0025 0.8386 0.0036
TCN
ID 10
0.9977 0.0022 0.8637 0.0072 0.8577 0.0160 0.7399 0.0001 0.8446 0.0011 0.8282 0.0136
INDRA 0.9858 0.0141 0.8546 0.0176 0.8638 0.0070 0.7923 0.0047 0.8370 0.0105 0.8100 0.0447
Table 3: Precision of the models on SynCAN dataset.
Model Data Continuous Playback Flooding Suppress Plateau
TCN
ID 2
0.4457 0.2458 0.0205 0.9027 0.3022
INDRA 0.1992 0.3696 0.1577 0.2812 0.3033
TCN
ID 3
0.5231 0.0000 0.1028 0.5854 0.7809
INDRA 0.0143 0.0000 0.3766 0.3261 0.6192
TCN
ID 10
0.3706 0.1949 0.000 0.0212 0.2036
INDRA 0.1779 0.1668 0.9413 0.0386 0.2224
direct consequence of the stopping mechanism im-
plemented during training, and in the case of TCN,
of the choices made to keep a lightweight architec-
ture. For playback attacks, precision is very low for
both models, which leads to the similarly low false
positive rates achieved in this class. This is not sur-
prising since during a playback attack, a portion of
past data is written over its current values, making
the signal look normal, and thus the attack difficult
to detect. TCN clearly achieves a better performance
than INDRA in detecting continuous attacks. More-
over, for message IDs 2 and 3, TCN detects suppres-
sion attacks with a much larger precision compared
to INDRA. This result appears to be influenced by
the number of signals in the message, since preci-
sion significantly decreases as the number of signals
increases. As for plateau attacks, the two methods
achieve similar results. INDRA is more precise than
the TCN model is on detecting flooding attacks. This
is an expected result, mainly due to the TCN accu-
rately reconstructing data from a flooding attack since
the data values are not altered during such an attack.
To sum up, the TCN model is capable of detecting
all message modification attacks (continuous change,
playback and plateau) effectively. Although detect-
ing attacks which modify the arrival rates of CAN bus
messages was not part of the original goal, TCN also
proved successful at detecting suppression attacks.
CrySyS. The message IDs in the SynCAN dataset
contains signals that are physically interdependent,
but are very weakly correlated; this also increases the
difficulty of the detection task. In order to assess how
the two models perform in a different setting, we con-
sider two message IDs of the CrySyS dataset which
contains more signals with a strong correlation. Here,
similarly to SynCAN, only one signal was attacked.
The results are shown in Table 4. We notice that both
Table 4: Results for the CrySyS dataset.
Model Data Acc. FPR Precision
TCN
ID 280
0.8833 0.0426 0.7766
INDRA 0.7989 0.0000 0.0000
TCN
ID 290
0.9159 0.0687 0.7701
INDRA 0.8617 0.0378 0.7755
models still achieve high accuracy and a low false
positive rate, with TCN showing a high precision for
both attacks, as opposed to INDRA, failing to detect
the attack in message 280.
Summary. The simple TCN architecture achieves
a slightly better accuracy compared to the INDRA
model on both datasets. A remarkable achievement of
TCN is the significant reduction of false positives (by
a factor of 10) in nearly all cases: this translates to a
more reliable detector in practice. Another advantage
of the TCN is that it is quick to train, and achieves in
general lower training and validation loss (see Figure
3 for an example).
5 CONCLUSIONS
In this paper we examined the applicability of tem-
poral convolutional networks to CAN bus intrusion
detection, with a focus on message modification at-
tacks. To this end, we proposed a lightweight TCN,
and showed that its classification performance com-
pared favorably to the state-of-the-art baseline IN-
DRA across different datasets and attack classes.
Specifically, we demonstrated that our computation-
efficient and compact TCN model achieves similar or
better accuracy, while reducing false positives with an
order of magnitude. This shows that TCNs have a
great potential both in modeling CAN bus signal and
being deployed in practical settings.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
494

Figure 3: Training loss (continuous lines) and validation
loss (dashed lines) of the two models on message ID 290 of
the CrySyS dataset.
Future Work. First of all, the elimination of
the early termination mechanism would potentially
yield better performance; early termination was nec-
essary in our experiments due to hardware-related
constraints. Second, the TCN architecture was kept
very simple on purpose to ensure a computationally
lightweight model. However, the learning abilities of
the network could be improved by increasing the fil-
ter size and the dilation factor between causal con-
volutions, and by stacking additional residual blocks
together. Third, it is worthwhile to investigate how
message-based and signal-based intrusion thresholds,
and the underlying intra-message signal correlation
influence the performance of both models for differ-
ent attack classes. Finally, correlations between sig-
nals across different message IDs could be consid-
ered leading to a more accurate representation of nor-
mal CAN bus behaviour. To this end, an architecture
combining multiple TCN blocks (modeling individual
message IDs a la CANet (Hanselmann et al., 2020))
could be used.
ACKNOWLEDGEMENTS
This work has been partially funded by the European
Commission via the H2020-ECSEL-2017 project SE-
CREDAS (Grant Agreement no. 783119). The re-
search presented in this paper and carried out at the
Budapest University of Technology and Economics
have been supported by the NRDI Office, Ministry
of Innovation and Technology, Hungary, within the
framework of the Artificial Intelligence National Lab-
oratory Programme, and the NRDI Fund based on the
charter of bolster issued by the NRDI Office.
REFERENCES
Aloysius, N. and Geetha, M. (2017). A review on deep
convolutional neural networks. In 2017 International
Conference on Communication and Signal Processing
(ICCSP), pages 0588–0592.
Bai, S., Kolter, J. Z., and Koltun, V. (2018). An empirical
evaluation of generic convolutional and recurrent net-
works for sequence modeling. ArXiv, abs/1803.01271.
Gazdag, A., Ferenczi, C., and Butty
´
an, L. (2020). Develop-
ment of a man-in-the-middle attack device for the can
bus. In 1st Conference on Information Technology and
Data Science.
Gazdag, A., Neubrandt, D., Butty
´
an, L., and Szalay, Z.
(2019). Detection of injection attacks in compressed
can traffic logs. In Hamid, B., Gallina, B., Shabtai,
A., Elovici, Y., and Garcia-Alfaro, J., editors, Secu-
rity and Safety Interplay of Intelligent Software Sys-
tems, pages 111–124, Cham. Springer International
Publishing.
Hanselmann, M., Strauss, T., Dormann, K., and Ulmer, H.
(2020). CANet: An unsupervised intrusion detection
system for high dimensional can bus data. IEEE Ac-
cess, 8:58194–58205.
He, Y. and Zhao, J. (2019). Temporal convolutional net-
works for anomaly detection in time series. Journal
of Physics: Conference Series, 1213:042050.
Hossain, M. A., Inoue, H., Ochiai, H., Fall, D., and
Kadobayashi, Y. (2020). LSTM-based intrusion de-
tection system for in-vehicle can bus communications.
IEEE Access, 8:185489–185502.
Khan, Z., Chowdhury, M., Islam, M., Huang, C.-Y., and
Rahman, M. (2020). Long short-term memory neural
network-based attack detection model for in-vehicle
network security. IEEE Sensors Letters, 4:1–4.
Kukkala, V. K., Thiruloga, S. V., and Pasricha, S. (2020).
INDRA: Intrusion detection using recurrent autoen-
coders in automotive embedded systems. IEEE Trans-
actions on Computer-Aided Design of Integrated Cir-
cuits and Systems, 39:3698–3710.
Lestyan, S.,
´
Acs, G., Bicz
´
ok, G., and Szalay, Z. (2019).
Extracting vehicle sensor signals from CAN logs for
driver re-identification. In Mori, P., Furnell, S., and
Camp, O., editors, Proceedings of the 5th Interna-
tional Conference on Information Systems Security
and Privacy, ICISSP 2019, Prague, Czech Republic,
February 23-25, 2019, pages 136–145. SciTePress.
Lin, Y., Chen, C., Xiao, F., Avatefipour, O., Alsubhi, K., and
Yunianta, A. (2021). An evolutionary deep learning
anomaly detection framework for in-vehicle networks
– CAN bus. IEEE Transactions on Industry Applica-
tions, to appear.
Lokman, S. F., Othman, A. T., Musa, S., and Husaini, A.
B. M. (2019). Deep contractive autoencoder-based
anomaly detection for in-vehicle controller area net-
work (CAN). In Husaini, A. B. M., Sidik, M.,
and Ochsner, A., editors, Progress in Engineering
Technology: Automotive, Energy Generation, Qual-
ity Control and Efficiency, pages 195–205. Springer
International Publishing, Cham.
Detecting Message Modification Attacks on the CAN Bus with Temporal Convolutional Networks
495

Mo, X., Chen, P., Wang, J., and Wang, C. (2019). Anomaly
detection of vehicle can network based on message
content. In Li, J., Liu, Z., and Peng, H., editors, Se-
curity and Privacy in New Computing Environments,
pages 96–104, Cham. Springer International Publish-
ing.
Moore, M. R., Bridges, R. A., Combs, F. L., Starr, M. S.,
and Prowell, S. J. (2017). Modeling inter-signal ar-
rival times for accurate detection of can bus signal in-
jection attacks: A data-driven approach to in-vehicle
intrusion detection. In Proceedings of the 12th An-
nual Conference on Cyber and Information Security
Research, CISRC ’17, New York, NY, USA. Associa-
tion for Computing Machinery.
Muter, M. and Asaj, N. (2011). Entropy-based anomaly de-
tection for in-vehicle networks. IEEE Intelligent Ve-
hicles Symposium, Proceedings, pages 1110–1115.
Negi, N. S., Jelassi, O., Clemencon, S., and Fischmeis-
ter, S. (2019). A LSTM approach to detection of au-
tonomous vehicle hijacking. In Proceedings of the 5th
International Conference on Vehicle Technology and
Intelligent Transport Systems - Volume 1: VEHITS,
pages 475–482. INSTICC, SciTePress.
Novikova, E., Le, V., Yutin, M., Weber, M., and Anderson,
C. (2020). Autoencoder anomaly detection on large
CAN bus data. In Proceedings of DLP-KDD 2020.,
New York, NY, USA. ACM.
Remeli, M., Lesty
´
an, S.,
´
Acs, G., and Bicz
´
ok, G. (2019).
Automatic driver identification from in-vehicle net-
work logs. In 2019 IEEE Intelligent Transporta-
tion Systems Conference, ITSC 2019, Auckland, New
Zealand, October 27-30, 2019, pages 1150–1157.
IEEE.
Song, H. M., Kim, H. R., and Kim, H. K. (2016). Intrusion
detection system based on the analysis of time inter-
vals of CAN messages for in-vehicle network. In 2016
International Conference on Information Networking
(ICOIN), pages 63–68.
Song, H. M., Woo, J., and Kim, H. K. (2020). In-
vehicle network intrusion detection using deep convo-
lutional neural network. Vehicular Communications,
21:100198.
Stone, B. J., Graham, S., Mullins, B., and Kabban, C. S.
(2018). Unsupervised time series extraction from con-
troller area network payloads. In 2018 IEEE 88th Ve-
hicular Technology Conference (VTC-Fall), pages 1–
5.
Tariq, S., Lee, S., and Woo, S. S. (2020). CANTransfer:
Transfer learning based intrusion detection on a con-
troller area network using convolutional lstm network.
In Proceedings of the 35th Annual ACM Symposium
on Applied Computing, SAC ’20, page 1048–1055,
New York, NY, USA. Association for Computing Ma-
chinery.
Taylor, A., Japkowicz, N., and Leblanc, S. (2015).
Frequency-based anomaly detection for the automo-
tive can bus. In 2015 World Congress on Industrial
Control Systems Security (WCICSS), pages 45–49.
Taylor, A., Leblanc, S., and Japkowicz, N. (2016). Anomaly
detection in automobile control network data with
long short-term memory networks. In 2016 IEEE
International Conference on Data Science and Ad-
vanced Analytics (DSAA), pages 130–139.
Tomlinson, A., Bryans, J., Shaikh, S. A., and Kalutarage,
H. K. (2018). Detection of automotive can cyber-
attacks by identifying packet timing anomalies in time
windows. In 2018 48th Annual IEEE/IFIP Interna-
tional Conference on Dependable Systems and Net-
works Workshops (DSN-W), pages 231–238.
van den Oord, A., Dieleman, S., Zen, H., Simonyan, K.,
Vinyals, O., Graves, A., Kalchbrenner, N., Senior, A.,
and Kavukcuoglu, K. (2016). Wavenet: A generative
model for raw audio. ArXiv, abs/1609.03499.
Weber, M., Wolf, G., Sax, E., and Zimmer, B. (2018). On-
line detection of anomalies in vehicle signals using
replicator neural networks. In ESCAR 2018.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
496
