
Point Cloud based Hierarchical Deep Odometry Estimation
Farzan Erlik Nowruzi
1
, Dhanvin Kolhatkar
1
, Prince Kapoor
2
and Robert Laganiere
1,2
1
School of Electrical Engineering and Computer Sciences, University of Ottawa, Canada
2
Sensorcortek Inc., Canada
Keywords:
Deep Learning, Lidar, Pointcloud, Odometry.
Abstract:
Processing point clouds using deep neural networks is still a challenging task. Most existing models focus on
object detection and registration with deep neural networks using point clouds. In this paper, we propose a
deep model that learns to estimate odometry in driving scenarios using point cloud data. The proposed model
consumes raw point clouds in order to extract frame-to-frame odometry estimation through a hierarchical
model architecture. Also, a local bundle adjustment variation of this model using LSTM layers is implemented.
These two approaches are comprehensively evaluated and are compared against the state-of-the-art.
1 INTRODUCTION
Autonomous vehicles should be able to operate in
known or unknown environments. In order to nav-
igate these environments, they have to be able to
precisely localize themselves. A major issue in lo-
calization and mapping is caused by the tight cou-
pling between these modules. We require highly pre-
cise maps for localization, while accurate localiza-
tion is required to create precise maps. This inter-
dependency has raised interest in methods that per-
form both tasks at the same time, termed Simultane-
ous Localization and Mapping (SLAM).
In an unknown environment, maps are not avail-
able for use as a priori of the environment model. A
localization module is needed to infer the position on
its own. One way to address this challenge is to es-
timate the amount of movement in between two in-
dividual observations and incrementally calculate the
location of a sensor in the coordinate frame of the first
observation. This is termed odometry-based localiza-
tion. We propose to build a novel method to tackle
this problem by relying on the rich sensory data from
lidar in an unknown environment.
To achieve this, we utilize the power of deep neu-
ral models to build the backbone of the odometry
module. Deep models are not suited to perform tasks
such as localization using point cloud data out of the
box. In traditional methods, landmark extraction, data
association, filtering and/or smoothing are used in a
pipeline to get the final estimate. Our goal is to re-
place this pipeline with an end-to-end deep model.
Various traditional approaches (Zhang and Singh,
2014)(Chen et al., 2020) are proposed to perform
scan-to-scan matching to extract odometry data. The
majority of these models rely on using ICP and
RANSAC to extract the registration. The majority
of odometry estimation approaches utilize a temporal
filtering stage that is classified as the Filtering or the
Bundle Adjustment. Filtering models summarize the
observations in compact representations. This makes
them lighter and faster than bundle adjustment meth-
ods that maintain a much larger set of observations
and constantly refine their past and current predic-
tions.
Deep neural models have revolutionized many as-
pects of the computer vision field (Simonyan and Zis-
serman, 2015)(Szegedy et al., 2016). Point-cloud pro-
cessing is one of the challenging scenarios that deep
models have a harder time expanding. This is due
to the complexity in the scale and the unordered na-
ture of the information representation in point-clouds.
(Zhou and Tuzel, 2018)(Qi et al., 2017a)(Qi et al.,
2017b)(Liu et al., 2019) have tackled this problem.
Many of these approaches are designed to address the
classification and segmentation tasks on point-clouds.
A comprehensive review of these methods can be
found in (Guo et al., 2019). In this paper, we focus
on the application of deep models to the odometry-
based localization task. Using deep models for this
purpose is a fairly new field and methods have not yet
matured enough. Unlike the current models that ex-
tract image-like representation of the data, our model
directly consumes point clouds. We employ models
112
Nowruzi, F., Kolhatkar, D., Kapoor, P. and Laganiere, R.
Point Cloud based Hierarchical Deep Odometry Estimation.
DOI: 10.5220/0010442901120121
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 112-121
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

proposed for segmentation and classification of point
cloud data as our feature extraction backbone. More
specifically, the input point-cloud data is processed
using Siamese PointNet++ layers (Qi et al., 2017b).
It follows the same architecture as Flownet3D (Liu
et al., 2019) in order to extract the correlation between
feature maps. The point-clouds used in Flownet3D
are captured from a single object and consist of fewer
points. The point-clouds used for odometry include a
much larger number of points, shifts, moving objects
and drastic changes in the environment. Flownet3D
uses up-convolutions to extract the 3D flow between
two point-clouds. Instead, we pass the features maps
to fully connected layers to regress the rotation and
translation parameters.
2 RELATED WORK
Traditional visual localization methods such as LSD-
SLAM (Engel et al., 2014) and ORB-SLAM (Mur-
Artal et al., 2015) mainly rely on local features such
as SIFT (Lowe, 2004) and ORB (Rublee et al., 2011)
to detect the keypoints on camera images and track
them through multiple frames. Their lidar-based
counterparts, LOAM (Zhang and Singh, 2014) and
SLOAM (Chen et al., 2020), utilize a similar process-
ing framework with point-cloud data. The capabilities
of these models are always limited by the repeatabil-
ity of the hand-crafted features in consecutive frames.
One major issue in the odometry challenge is to
solve the data association or registration problem.
RANSAC (Hartley and Zisserman, 2003) like systems
are commonly used to rule out the outliers. Once the
data association is achieved, the transformation is es-
timated.
(Zhang and Singh, 2014) introduces Lidar based
Odometry and Mapping (LOAM), which is one of
the most prominent works in this field. LOAM ex-
tracts key-points from lidar point-clouds and builds a
voxel grid-based map. They dynamically switch be-
tween frame-to-model and frame-to-frame operation
to simultaneously estimate odometry and build a map.
(Chen et al., 2020) builds on the idea of LOAM by re-
placing the key-points with semantic objects.
The use of learned features has been shown to pro-
vide better results in many computer vision tasks in
comparison to hand-crafted ones. Following the rev-
olution of deep learning in image processing, (Chen
et al., 2017) extracts deep learned features from im-
ages that are later used to perform the place recogni-
tion task. One of the early deep networks for camera
pose estimation is defined in (Kendall et al., 2015)
and is termed PoseNet. It estimates the camera re-
localization parameters in 6 Degree-of-Freedom (6-
DoF) using a single image. In contrast with traditional
methods that rely on Bag of Words (BoW) (Fei-Fei
and Perona, 2005), this method only requires the net-
work weights and is highly scalable for place recog-
nition. However, as the network weights represent
a map, each new location will require a new train-
ing. (Brahmbhatt et al., 2018) increases the perfor-
mance of PoseNet by replacing the Euler angles with
the log of unit-quaternions and incorporating odom-
etry results from pre-existing methods. This param-
eterization of rotation only requires 3 values instead
of 4 parameters of quaternions and avoids over pa-
rameterization. On the other hand, (Cho et al., 2019)
shows that Euler angles are more stable than quater-
nion based loss in their study. (Sattler et al., 2018)
provides a comparison of visual localization methods
on multiple outdoor datasets with variable environ-
mental conditions.
In recent years, there is an increasing interest
in solving the odometry problem with deep learning
models. One of the first works that directly tackles
the visual odometry challenge through an end-to-end
approach is proposed by (Wang et al., 2017). Odome-
try is estimated by utilizing a 9-layered convolutional
neural network with two LSTM layers at the end.
Processing point cloud data is very different than
processing images. Regularly, special tricks are ap-
plied on the point cloud to get an image-like represen-
tations and apply convolutional networks. (Li et al.,
2019) builds depth maps from lidar point-clouds and
uses it to extract surface normals. Using multi-task
learning, it tries to simultaneously estimate odometry
and build attention masks for geometrically consis-
tent locations through a Siamese model. Using their
combined loss function, they achieve comparable re-
sults to traditional approaches. (Cho et al., 2019) uti-
lizes two Siamese networks; one with surface normals
and the other with vertices. Features extracted from
both Siamese branches are summed and passed to an
odometry extraction network.
The deep neural models that take raw point-clouds
as input are categorized in two groups: Voxel-based
and Point-based methods. A voxel is a 3D partition in
the 3D point-cloud space.
Point-based approaches directly consume the
points in the cloud. These methods rely on local re-
gion extraction techniques and symmetric functions
to describe the selected points in each region. (Qi
et al., 2017a) introduces the idea of approximating
a symmetric function using a multi-layer perceptron
in order to process unordered point cloud data. Con-
volutional filters are used on these features to per-
form 3D shape classification and object part segmen-
Point Cloud based Hierarchical Deep Odometry Estimation
113

tation. This work is expanded by PointNet++ (Qi
et al., 2017b) to better extract features from local
structures. This is achieved through the use of iter-
ative farthest point sampling and grouping of the un-
ordered points to hierarchically reduce their number
and only maintain a more abstract representation of
the original set.
Any deep learning approach that uses Siamese
model for odometry relies on a matching layer that
could be implemented in various forms. (Revaud
et al., 2016) introduces a new layer that hierarchically
extracts the image features for dense matching that is
used for flow estimation. Flownet (Ilg et al., 2017)
convolves features of one Siamese branch against the
other and uses the results to explain the scene flow.
3 DATA PRE-PROCESSING
We utilize KITTI an odometery dataset (Geiger et al.,
2012) in our experiments. In this section we describe
the pre-processing steps to prepare the input data to
our deep odometry model.
3.1 Label Extraction
The KITTI dataset employs global pose coordinates
on the local frame. Pose information is provided
from the view of the first frame as the center of the
coordinate system. These, however, are not suit-
able labels for the frame-to-frame odometry estima-
tion task. Frame-to-frame pose transformations are
achieved through following formula:
X
i+1
= T
i,i+1
· X
i
T
i,i+1
= G
0,i+1
· G
−1
0,i
(1)
T
i,i+1
is the local transformation between two co-
ordinate centers X
i
and X
i+1
. G
0,i
and G
0,i+1
are the
global transformation from the first frame (center of
the global coordinate frame) to the frames i and i + 1.
3.2 Point-cloud Sampling
The point-clouds in the KITTI dataset consist of 100k
points per frame. This is a huge set of points. Given
that lidar observations become less reliable at longer
distances, we remove any point farther than 50m from
the center in the x and z dimensions. There is still a
large number of points remaining after this step. To
reduce these points, we use the farthest point sam-
pling strategy (Eldar et al., 1997) to sample only 12k
and 6k points that are later used in our experiments.
Point-clouds collected in driving environments
usually contain a large amount of ground points,
which are not useful to extract motion information
and are usually discarded as a pre-processing step
(Ushani et al., 2017)(Liu et al., 2019). However,
ground as a flat surface can provide cues regarding
the pitch and roll orientations of the vehicle, which is
valuable for the estimation of 6-DoF odometry. We
choose a 75% − 25% sampling ratio for non-ground
and ground points, in an attempt to balance the size of
the data and the accuracy of the system.
3.3 Dataset Augmentation
Another major issue with using deep learning models
for odometry results from the highly imbalanced na-
ture of the labels: the majority of roads are designed
as straight lines, with only a few turns made in long
drives. Deep learning models are highly dependent
on datasets being as complete as possible, which is
not the case in these scenarios.
On the dataset side, we employ over-sampling of
the minority labels to address this challenge. As a
result, models can learn the dynamics of the environ-
ment while assigning the required attention to minor-
ity transformations.
In 6-DoF motion, there are three rotation and three
translation parameters that need to be estimated. Ro-
tation components include α, β, and γ as the pitch,
yaw, and roll, and translation components consist of
motion in x, y, and z axes. There are various methods
that perform over-sampling - e.g. repetition, or Syn-
thetic Minority Over-Sampling Technique (Chawla
et al., 2002).
In order to achieve a more balanced dataset, we
use the repetition method based on the amount of
divergence from the average odometry value. To
augment the dataset, we first calculate the average
and standard deviation for the rotation and translation
component norms individually. To decide on which
samples to use, we follow 3 rules:
• Translation: if x
t
< |µ
t
− aσ
t
| then augment with
T .
• Rotation: if x
r
< |µ
r
− aσ
r
| then augment with T .
• If both translation and rotation rules are satisfied
perform another augmentation run with x.
Subscripts r and t represent the rotation and trans-
lation components, respectively. x is the input norm,
µ is the average value, and σ is the standard deviation
for the corresponding input T . a is the ratio that is
used for the range interval.
Once a point pair is chosen to be repeated, number
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
114

Figure 1: Histograms of the consecutive transformation pa-
rameters before and after data augmentation.
of copies N
x
is calculated using the following formula.
N
x
= d2
x−µ
a·σ
·
1
D
e (2)
D is a divisor value that explicitly controls the magni-
tude of the repetitions and is set to 4.
In this way, we add approximately 10000 samples
for rotation, 6000 samples for translation, and 2000
samples for both.
In the majority of driving scenarios, the cars are
in motion and are seldom stopped. To address this,
we repeat the identity transformation with a random
probability of 10% on the dataset. This results in the
addition of approximately 2000 samples to the train-
ing set.
Figure 1 compares the distribution of data points
before and after augmentation. The imbalance in spe-
cific components is not completely removed, but is
less than in the original dataset. This is especially the
case for yaw (b) and z components that have a major
effect on the accuracy of odometry. It is worth men-
tioning that, as all these components are correlated
with each other, completely removing the imbalance
only using this data is an impossibly challenging task.
4 MODEL ARCHITECTURE
4.1 Proposed Core Model
We rely on PointNet++ layers (Qi et al., 2017b) to
build our model. Similar to their model, we propose
a Siamese network that is able to regress the transfor-
mation between two point-clouds. Instead of passing
the whole point-cloud to a PointNet feature extrac-
tion layer, we divide the inputs into two groups; one
for ground points, and one for non-ground points. For
ground points, we only use a single PointNet layer
with a grouping distance threshold of 4 that outputs
400 points along with their descriptors. Descriptors
are generated using 3 consecutive multi-layer percep-
trons (MLP) of size (64, 96, 128). For non-ground
points, there are two layers that subsequently use
grouping distances of 0.5 and 1. 1500 points are pro-
duced in the first layer and they are summarized to
800 points in the second layer. Both of these layers
use 3 MLPs where the first one consists of (64,80, 96)
and the second one has layers of size (112, 128, 128).
The distance metric used to group ground points is
larger than the non-ground ones. This is due to the
harsher sampling performed on the ground points that
has resulted in larger distances between the points.
As the PointNet++ layers use farthest point sam-
pling internally, we keep the ground and non-ground
features separate for the feature extraction layer. The
final outputs of ground and non-ground segments both
have a dimensionality of 128. Both feature maps are
concatenated along the points dimension building a
feature map of size 1200 × 128. At this stage, fea-
tures from each frame are passed to the flow embed-
ding layer of (Liu et al., 2019). We use the cosine dis-
tance metric to correlate the features of each frame to
each other. For further future extraction in this layer,
we use the MLP with (128, 128, 128) width. Through
some experimentation, we found using nearest neigh-
bor with k = 10 gave the best results at this step. The
final output shape of this layer is 1200 × 128.
Once the embedding between two frames is cal-
culated, we run another feature extraction layer with
radius of 1 and MLPs of size 128, 96, 64. This layer
is also responsible for reducing the number of feature
points that results in a feature map of shape 300 ×64.
All of the layers up to this stage include batch normal-
ization (Ioffe and Szegedy, 2015) after each convolu-
tion.
The resulting 2D feature map is flattened and a
drop-out layer with keep probability of 0.6 is applied
on it. In order to extract the rotation and translation
parameters, we use two independent fully connected
layers of width 128 and 3.
The final outputs of size 3 are concatenated to
build the 6-DoF Euler transformation parameters.
Figure 2 shows the architecture of this network.
4.2 Hierarchical Registration Model
In traditional literature (optimization or RANSAC
models) (Kitt et al., 2010)(Badino et al., 2013), an
odometry prediction is refined quickly through mul-
tiple iterations. We argue that the same could be ap-
plied in the case of deep learning-based odometry es-
timation models. Inspired by a hierarchical homogra-
phy network (Nowruzi et al., 2017), we use multiple
layers of the same network to train on the residuals
of previous predictions. The new ground truth is cal-
culated by multiplying the ground truth from the pre-
Point Cloud based Hierarchical Deep Odometry Estimation
115
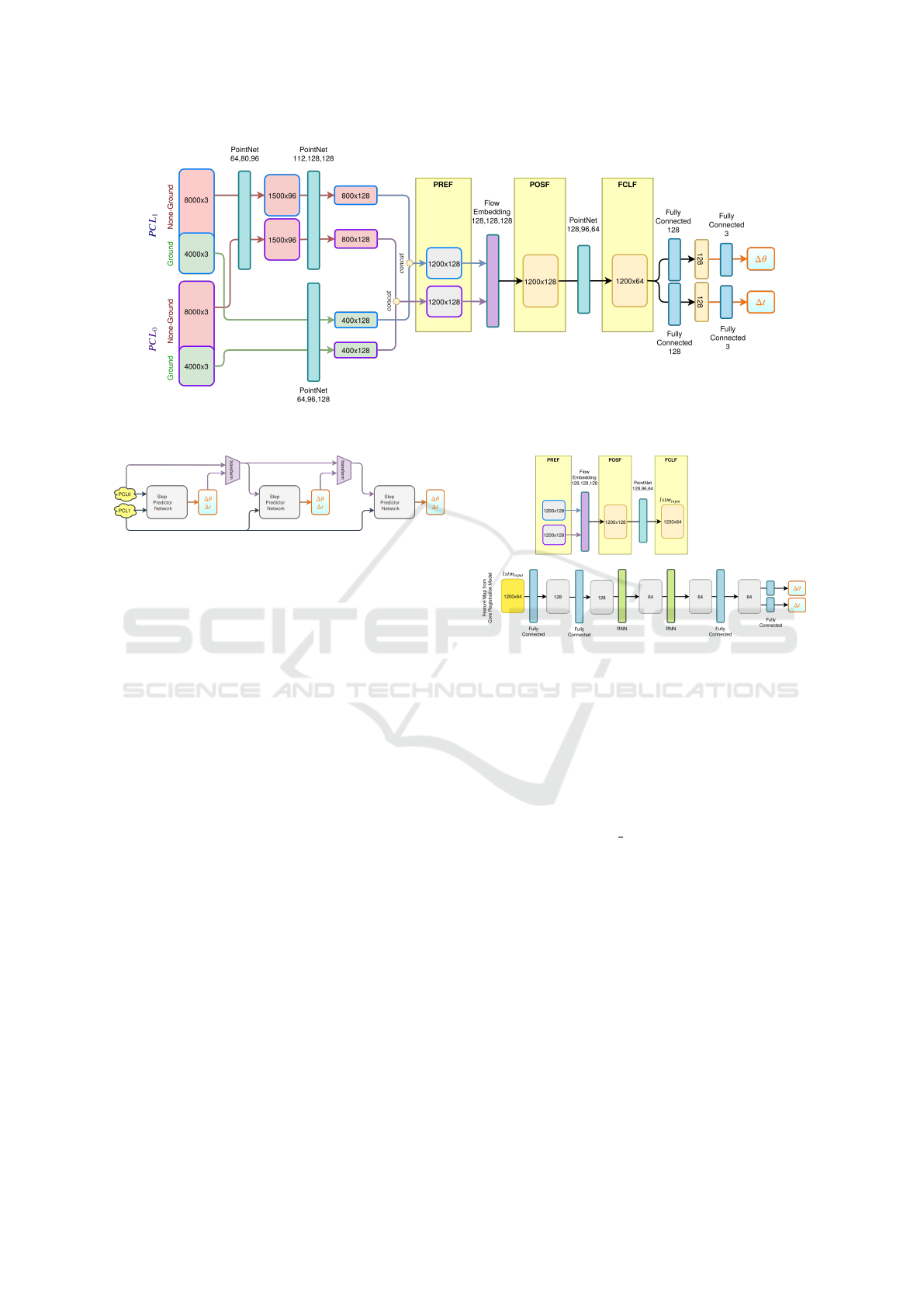
Figure 2: Proposed core registration model architecture to process two consecutive frames and extract transformation param-
eters in between them.
Figure 3: Progressive Prediction. In the first iteration, ∆θ
and ∆t is estimated using PCL
0
and PCL
1
. The source point
cloud PCL
0
is transformed to PCL
0
0
. The residual trans-
formation between PCL
1
and X
0
0
is calculated and used to
estimate the next iteration of the model.
vious iteration by the inverse of its prediction. In this
way, each network reduces the dynamic range of error
from the previous models and successively achieves a
better result. Figure 3 shows this process.
The higher accuracy comes with the cost of in-
creased train and test times. The key element in this
approach is to keep the computational complexity as
low as possible for each module in order to satisfy
real-time processing requirements for the odometry
task.
4.3 Temporal Filtering
The goal of the odometry model is to smooth the ef-
fect of errors caused by the registration network. Our
proposed model requires a large amount of memory
due to its mid-level feature representation. Adding
the memory requirements that the temporal model im-
poses, training quickly becomes a challenge for the
system. Furthermore, training the core registration
network is already a difficult task. Extra parametriza-
tion from the LSTM model makes an already difficult
task an even more challenging one.
To alleviate these issues we propose a two stage
training approach that breaks the initial feature extrac-
tor and the temporal filter into two disjoint models.
Once the core registration network is trained, mid-
Figure 4: Temporal model along with the three different
input levels. FCLF is the natural input state of the temporal
model. PREF and POSF require additional layers from the
registration model to be included and re-learned inside the
temporal model.
level features are extracted and used as inputs to train
the temporal model.
The base of our proposed temporal model consists
of two fully connected layers of width 64 and 128. It
is followed by two bidirectional LSTM with 64 hid-
den layers with a soft sign activation function. The
output of the LSTM is fed to a fully connected layer
with a size of 64. Finally, in the output layer, we
have two fully connected networks with 3 nodes each
that estimate the rotation and translation, individually.
Figure 4 shows this model.
We employ drop-out and batch-normalization af-
ter each layer. For the LSTM model, a temporal win-
dow of 5 frames is utilized.
4.4 Loss Function
As explained in Section 3, the odometry labels suffer
from data imbalance problem. The majority of the in-
stances in the dataset follow a straight line, with only
a few of them constituting the turns. To tackle these
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
116

challenges, we incorporate measures in our loss func-
tion.
Using the naive L2-norm diminishes the effect of
instances with larger errors, as most of the batches
result in smaller errors. It is required to make the
model more sensitive towards larger errors. This
is achieved through the use of online-hard-example-
mining (OHEM) loss (Shrivastava et al., 2016). In
OHEM, only the top k samples with highest loss val-
ues are used to calculate the final loss. However, once
this value is set it does not change during the train.
This could result in a training session that has high
fluctuations in loss values. To address this, we im-
plement an adaptive version of OHEM loss, that in-
creases the number of top k after certain epochs. The
model initially focuses on the hardest examples, be-
fore its attention shifts towards all of the examples.
This provides the hardest examples that are less fre-
quent with a chance to drive the network towards the
global minimum.
Another aspect of the loss function is to analyze
the effects of errors in each component of the label.
Rotation and translation components are separately
extracted from the model. To enable the model’s ca-
pability of adapting to each component, instead of us-
ing the naive approach, we employ a weighting mech-
anism. To introduce uncertainty in our loss function,
we consider the log of normal distribution and phrase
it as a minimization problem. In odometry, there are
6 parameters to be learnt that represent two compo-
nents. We use the same weight for parameters related
to each component. In order to practically implement
this loss function, we replace the standard deviation
σ of normal distribution with exp(w) that ensures the
learned uncertainty is represented by a positive value.
This results in the following final loss function.
l
w
=exp(−w
r
)kx
r
− ˆx
r
k + w
r
+
exp(−w
t
)kx
t
− ˆx
t
k + w
t
(3)
x
t
and x
r
are predicted translation and rotation
variables. ˆx
t
and ˆx
r
define the ground-truth. w
r
and
w
t
are the trainable weighting parameters, and l
w
de-
fines the final loss.
5 EXPERIMENTS
Estimating 6-DoF odometry using point-clouds is a
challenging task. All the points are down sampled
as described in section 3. We first use the registra-
tion model to extract the transformation between two
frames. This could be repeated for all the point-cloud
pairs to generate the odometry trace. However, the
Figure 5: Estimated odometry trace for KITTI sequences
using 8k4k comp model. Sequences 00-08 are used to train,
and sequences 09-10 are used as test data for the model.
additive nature of the noise quickly drifts the trace
away from the ground truth. Due to this fact, there is
no single metric that can explain all the various fail-
ures in the system. We evaluate various aspects of
the model using KITTI odometry metrics; Absolute
Trajectory Error (ATE), Sequence Translation Drift
Percentage, Sequence Rotation error per 100 meters,
Relative Rotation Error (RRE) and Relative Transla-
tion Error (RTE)
RTE and RRE are the most important metrics as
they evaluate the effectiveness of model for frame-to-
frame estimation, independent of the trajectory. This
is the main target that model is trained for.
5.1 Hierarchical Model
In this section we evaluate the performance of the hi-
erarchical model acronymed as 8k4k comp. Figure
5 shows the trajectories of various training iterations
and Figure 6 presents their error metrics. As expected,
estimates of the second iteration are far superior to
the first iteration. The third iteration reduces the error
further but the reduction rate is smaller than the previ-
ous iteration. This is due to the fact that after certain
point, the learning process will plateau as the amount
of information to learn is much smaller. The trend is
clearly visible in RTE and RRE metrics.
5.2 Temporal Model
Another way to increase the accuracy of odometry is
by employing temporal features. However, training
the frame-to-frame estimation model requires a sig-
nificant amount of system resources. Adding LSTM
on top of that model will dramatically increase these
requirements. In such cases, it is common to use
a pre-trained feature extraction network and provide
mid-level features as inputs to an LSTM model. Fol-
lowing this idea, we evaluate three features maps
taken from various layers of our trained model.
• Feature maps immediately before the flow embed-
ding layer (PREF).
Point Cloud based Hierarchical Deep Odometry Estimation
117

Figure 6: Comparison of various iterations of the proposed
model.
• Feature maps immediately after the flow embed-
ding layer (POSF).
• Feature maps prior to the fully connected layers in
the feature extraction network (FCLF).
PREF is the earliest level of features among the
three. This model requires the largest temporal model
as the flow embedding and the feature extraction lay-
ers from the original model are retrained in temporal
model.
To reduce the complexity further, POSF features
are used. This is achieved by employing features af-
ter the flow embedding layer. However, a point-cloud
feature extractor needs to be present in the LSTM.
Finally, FCLF is the smallest feature map. Most
of the flow matching and feature extraction work is
completed and only the fully connected model is left
for the LSTM model.
FCLF features are outperforming both PREF and
POSF features. This is the objective that is used to
train the frame-to-frame registration model. FCLF
mimics the registration model rather than learning
temporal features as the provided features are much
less informative compared to PREF and POSF.
Figure 7 shows the results of these comparisons.
It is seen that the usage of mid-level features is not as
Figure 7: Comparison of the performance of the temporal
model.
fruitful as using a second iteration. In some cases the
results are worse than the original feature extraction
model that is all attributed to the dividing the training
process into two parts.
5.3 Comparison to the State-of-the-Art
In this group of experiments, we compare the pro-
posed model to the state-of-the-art. Table 1 com-
pares various models in terms of sequence translation
drift percentage and mean sequence rotation error for
lengths of [100, 800]m. Please note that the results for
LOAM (Zhang and Singh, 2014), ICP
reported
are taken
from (Li et al., 2019).
LOAM (Zhang and Singh, 2014) is one of the
benchmarks in this field. It clearly outperforms all
of the deep methods in the comparison. One main
reason for that is the feature extraction back-bone net-
work. In our work, we relied on PointNet++ (Qi et al.,
2017b) features. Both LO-Net (Li et al., 2019) and
DeepLO (Cho et al., 2019) use 2D depth and surface
models such as vertex and normal representations.
This way, they completely avoid the usage of 3D data
for feature extraction. This trend is also visible across
the field as 2D feature extraction models are more ad-
vanced than their 3D counterparts. However, there is
a growing interest regarding the 3D feature extraction
methods (Wang et al., 2019)(Wu et al., 2019) that can
enhance the performance of deep odometry estima-
tion with 3D point clouds.
It is clearly seen that DeepLO (Cho et al., 2019)
is over-fitting to the training set. Our model is also
suffering from such a phenomenon, but the scale of
over-fitting is much lower. One reason for this is the
size of our model compared to the size of the input
dataset. Using PointNet++ layers results in large net-
works that require a large amount of data. LO-Net (Li
et al., 2019) addresses this problem by utilizing a 2D-
based feature extraction network (Zhou et al., 2017).
We use an implementation of the ICP algorithm from
the Open3D library
1
. In our implementation we use
1
http://www.open3d.org/
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
118

Table 1: Sequence translation drift percentage and mean sequence rotation error for the lengths of [100, 800]m.
DeepLO LO-Net LOAM ICP
reported
(Cho et al., 2019) (Li et al., 2019) (Zhang and Singh, 2014) (Li et al., 2019) ICP Ours Ours+ICP
Sequence t
rel
r
rel
t
rel
r
rel
t
rel
r
rel
t
rel
r
rel
t
rel
r
rel
t
rel
r
rel
t
rel
r
rel
00 0.32 0.12 1.47 0.72 1.10 0.53 6.88 2.99 32.14 13.4 3.41 1.48 2.38 1.08
01 0.16 0.05 1.36 0.47 2.79 0.55 11.21 2.58 3.52 1.14 1.55 0.68 2.01 0.60
02 0.15 0.05 1.52 0.71 1.54 0.55 8.21 3.39 22.64 7.02 3.35 1.40 2.81 1.27
03 0.04 0.01 1.03 0.66 1.13 0.65 11.07 5.05 37.30 4.76 6.13 2.07 5.68 1.65
04 0.01 0.01 0.51 0.65 1.45 0.50 6.64 4.02 2.91 1.34 2.04 1.51 1.65 1.21
05 0.11 0.07 1.04 0.69 0.75 0.38 3.97 1.93 56.91 19.93 2.17 1.09 1.74 0.99
06 0.03 0.07 0.71 0.50 0.72 0.39 1.95 1.59 29.30 6.93 2.47 1.10 1.66 0.89
07 0.08 0.05 1.70 0.89 0.69 0.50 5.17 3.35 42.01 28.80 3.62 1.91 1.23 0.92
08 0.09 0.04 2.12 0.77 1.18 0.44 10.04 4.93 36.58 12.36 3.61 1.61 2.74 1.29
09
∗
13.35 4.45 1.37 0.58 1.20 0.48 6.93 2.89 36.54 12.82 8.26 3.11 2.69 1.57
10
∗
5.83 3.53 1.80 0.93 1.51 0.57 8.91 4.74 28.54 6.48 11.19 5.65 6.22 2.33
the sub-sampled point-clouds. This results in a signif-
icant drop in performance in comparison to the results
of ICP
reported
(Li et al., 2019) that use the full point
cloud. However, using the full point cloud data entails
a large computational complexity burden. The sub-
sampling stage that is used to reduce the computa-
tional complexity is another aspect that affects the es-
timation performance of our model. The same points
are not always chosen to represent the same static ob-
jects. This inherently adds noise to our dataset. We
further explore using ICP as a final step on our es-
timates that significantly improves the performance.
This is an expected outcome, as the complexity of the
residual problem to solve for ICP at this stage is less
than the original one. Hence, it can easily find the
corresponding points and estimate better registration
parameters.
5.4 Input Dimensionality
We evaluate the performance of the models with 12k
and 6k input points. 8k4k represents the 8k and 4k di-
vision between non-ground and ground points. Sim-
ilarly, 4k2k corresponds to 4k ground and 2k non-
ground point sampling. Extra points only help in
providing better descriptors at the first layer where
the first sampling function in the network is called.
This results in better performance of the model, espe-
cially in the first iteration where the disparity between
matching points in two frames is much larger. How-
ever, the difference diminishes in the second and third
iterations. This entails that by employing a hierarchi-
cal model we could reduce the complexity of the input
point cloud by using coarser 3D point clouds. Results
of this comparison are shown in Figure 8.
5.5 Sampling Comparison
To better understand the importance of separately
sampling ground and non-ground points, we train
the same model (6k comp) with 6k globally sampled
Figure 8: Input point cloud dimensionality analysis. 8k4k
indicates 8k non-ground and 4k ground points in the input
cloud. 4k2k uses 4k non-ground and 2k ground points in
the input cloud.
Figure 9: Comparative results for various ablation stud-
ies.4k2k uses 4k non-ground and 2k ground points as its
input. 6k indicates that 6k points are globally sampled with-
out any distinction between ground and non-ground points.
comp uses one weight for the rotation component and one
weight for the translation component in the loss function.
indiv uses individual weights for each parameter in the pose.
tmat indicates that the rotation matrix is used instead of nor-
malized Euler angles to calculate the loss.
points from the point cloud. We train this model in
hierarchical manner and compare it to the 4k2k comp
model that employs 4k non-ground and 2k ground
input points. As it is shown in Figure 9, sampling
without distinction between ground and non-ground
points results in far worse performance. This is due
the large number of ground points in the point cloud
that provide much less information regarding transla-
tion and orientation of the sensor in comparison to the
Point Cloud based Hierarchical Deep Odometry Estimation
119

non-ground points.
5.6 Loss Comparison
The proposed model employs weighted l2 norm loss
on Euler angles and translation parameters. The loss
function utilizing 2 weights for each rotation and
translation components is indicated with comp, while
the indiv represents the usage of individual weights
for each transformation parameter.
Figure 10 shows comparative results of this ex-
periment. We observe that in the first two iterations,
component based weighting provides better results.
However, in the third iteration, individual weighting
achieves comparable results to the component based
function. It is worth mentioning that the scale of re-
duction in error between iteration 2 and 3 is small,
and the majority of the error reduction is achieved in
the first 2 iterations.
Figure 10: Comparative results over various iterations for
comp vs indiv weighting scheme in loss function. comp
uses one weight for rotation component and one weight for
translation component in the loss function. indiv uses indi-
vidual weights for each parameter in the pose.
5.7 Label Representation
Normalized Euler angles are used as the primary la-
bels along with normalized translation parameters in
our experiments. Normalization is utilized in order to
remove the scaling effects for various parameters in
calculation of the L2-norm. To validate our decision,
we compare our choice of label representation to the
transformation matrix representation with 12 parame-
ters (3 × 3 rotation and 3 translation). We employ the
component-based weighting on rotation and transla-
tion components of this representation. The trained
model is shown as 4k2k tmat comp in Figure 9. Re-
sults show that normalized Euler angles are a much
better representation than the 3 × 3 rotation matrix,
which is an over-parameterized representation of the
rotation.
6 CONCLUSION
In this paper, we have proposed a methodology to use
deep neural networks to estimate odometry based on
3D point clouds. We have proposed a data augmenta-
tion mechanism along with measures incorporated in
the loss function to estimate the frame-to-frame trans-
formation parameters. The proposed model success-
fully reduces the error in consecutive iterations. Fur-
thermore, we have evaluated the usage of pre-trained
feature maps for training temporal models. Our re-
sults are comparable to the state-of-the-art. We argue
that the extracted features from the 3D point clouds
are not descriptive enough for this task. 3D point-
cloud-based deep learning is still a new field and 3D
deep feature extraction techniques have not matured
as much as their 2D image-based counterparts.
REFERENCES
Badino, H., Yamamoto, A., and Kanade, T. (2013). Vi-
sual odometry by multi-frame feature integration. In
Proceedings of the IEEE International Conference on
Computer Vision Workshops.
Brahmbhatt, S., Gu, J., Kim, K., Hays, J., and Kautz, J.
(2018). Geometry-aware learning of maps for camera
localization. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition.
Chawla, N. V., Bowyer, K. W., Hall, L. O., and Kegelmeyer,
W. P. (2002). Smote: synthetic minority over-
sampling technique. Journal of artificial intelligence
research.
Chen, S. W., Nardari, G. V., Lee, E. S., Qu, C., Liu, X.,
Romero, R. A. F., and Kumar, V. (2020). Sloam: Se-
mantic lidar odometry and mapping for forest inven-
tory. IEEE Robotics and Automation Letters.
Chen, Z., Jacobson, A., S
¨
underhauf, N., Upcroft, B., Liu,
L., Shen, C., Reid, I., and Milford, M. (2017). Deep
learning features at scale for visual place recognition.
In Robotics and Automation (ICRA), 2017 IEEE Inter-
national Conference on. IEEE.
Cho, Y., Kim, G., and Kim, A. (2019). Deeplo:
Geometry-aware deep lidar odometry. arXiv preprint
arXiv:1902.10562.
Eldar, Y., Lindenbaum, M., Porat, M., and Zeevi, Y. Y.
(1997). The farthest point strategy for progressive im-
age sampling. IEEE Transactions on Image Process-
ing.
Engel, J., Sch
¨
ops, T., and Cremers, D. (2014). Lsd-slam:
Large-scale direct monocular slam. In European Con-
ference on Computer Vision. Springer.
Fei-Fei, L. and Perona, P. (2005). A bayesian hierarchical
model for learning natural scene categories. In Com-
puter Vision and Pattern Recognition, 2005. CVPR
2005. IEEE Computer Society Conference on. IEEE.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
120

suite. In Conference on Computer Vision and Pattern
Recognition (CVPR).
Guo, Y., Wang, H., Hu, Q., Liu, H., Liu, L., and Ben-
namoun, M. (2019). Deep learning for 3d point
clouds: A survey. arXiv preprint arXiv:1912.12033.
Hartley, R. and Zisserman, A. (2003). Multiple view geom-
etry in computer vision. In Multiple view geometry in
computer vision. Cambridge university press.
Ilg, E., Mayer, N., Saikia, T., Keuper, M., Dosovitskiy, A.,
and Brox, T. (2017). Flownet 2.0: Evolution of optical
flow estimation with deep networks. In Proceedings of
the IEEE conference on computer vision and pattern
recognition.
Ioffe, S. and Szegedy, C. (2015). Batch normalization: Ac-
celerating deep network training by reducing internal
covariate shift. In Proceedings of the 32nd Interna-
tional Conference on Machine Learning, Proceedings
of Machine Learning Research. PMLR.
Kendall, A., Grimes, M., and Cipolla, R. (2015). Posenet: A
convolutional network for real-time 6-dof camera re-
localization. In Proceedings of the IEEE international
conference on computer vision.
Kitt, B., Geiger, A., and Lategahn, H. (2010). Visual odom-
etry based on stereo image sequences with ransac-
based outlier rejection scheme. In 2010 ieee intelli-
gent vehicles symposium. IEEE.
Li, Q., Chen, S., Wang, C., Li, X., Wen, C., Cheng, M., and
Li, J. (2019). Lo-net: Deep real-time lidar odometry.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition.
Liu, X., Qi, C. R., and Guibas, L. J. (2019). Flownet3d:
Learning scene flow in 3d point clouds. In Proceed-
ings of the IEEE Conference on Computer Vision and
Pattern Recognition.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International journal of computer
vision.
Mur-Artal, R., Montiel, J. M. M., and Tardos, J. D. (2015).
Orb-slam: a versatile and accurate monocular slam
system. IEEE Transactions on Robotics.
Nowruzi, F. E., Japkowicz, N., and Laganiere, R. (2017).
Homography estimation from image pairs with hier-
archical convolutional networks. In Computer Vision
Workshop (ICCVW), 2017 IEEE International Confer-
ence on. IEEE.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017a). Point-
net: Deep learning on point sets for 3d classification
and segmentation. In Proceedings of the IEEE confer-
ence on computer vision and pattern recognition.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017b). Point-
net++: Deep hierarchical feature learning on point sets
in a metric space. In Advances in neural information
processing systems.
Revaud, J., Weinzaepfel, P., Harchaoui, Z., and Schmid,
C. (2016). Deepmatching: Hierarchical deformable
dense matching. International Journal of Computer
Vision, 120(3).
Rublee, E., Rabaud, V., Konolige, K., and Bradski, G.
(2011). Orb: An efficient alternative to sift or surf.
In Computer Vision (ICCV), 2011 IEEE international
conference on.
Sattler, T., Maddern, W., Toft, C., Torii, A., Hammarstrand,
L., Stenborg, E., Safari, D., Okutomi, M., Pollefeys,
M., Sivic, J., et al. (2018). Benchmarking 6dof out-
door visual localization in changing conditions. In
Proc. CVPR, volume 1.
Shrivastava, A., Gupta, A., and Girshick, R. (2016). Train-
ing region-based object detectors with online hard ex-
ample mining. In Proceedings of the IEEE conference
on computer vision and pattern recognition.
Simonyan, K. and Zisserman, A. (2015). Very deep con-
volutional networks for large-scale image recognition.
In International Conference on Learning Representa-
tions.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wo-
jna, Z. (2016). Rethinking the inception architecture
for computer vision. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition.
Ushani, A. K., Wolcott, R. W., Walls, J. M., and Eustice,
R. M. (2017). A learning approach for real-time tem-
poral scene flow estimation from lidar data. In 2017
IEEE International Conference on Robotics and Au-
tomation (ICRA). IEEE.
Wang, S., Clark, R., Wen, H., and Trigoni, N. (2017).
Deepvo: Towards end-to-end visual odometry with
deep recurrent convolutional neural networks. CoRR.
Wang, Y., Sun, Y., Liu, Z., Sarma, S. E., Bronstein, M. M.,
and Solomon, J. M. (2019). Dynamic graph cnn
for learning on point clouds. ACM Transactions on
Graphics (TOG).
Wu, W., Qi, Z., and Fuxin, L. (2019). Pointconv: Deep
convolutional networks on 3d point clouds. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition.
Zhang, J. and Singh, S. (2014). Loam: Lidar odometry
and mapping in real-time. In Robotics: Science and
Systems.
Zhou, T., Brown, M., Snavely, N., and Lowe, D. G. (2017).
Unsupervised learning of depth and ego-motion from
video. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition.
Zhou, Y. and Tuzel, O. (2018). Voxelnet: End-to-end learn-
ing for point cloud based 3d object detection. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition.
Point Cloud based Hierarchical Deep Odometry Estimation
121
