
What Does Visual Gaze Attend to during Driving?
Mohsen Shirpour, Steven S. Beauchemin and Michael A. Bauer
Department of Computer Science, The University of Western Ontario, London, ON, N6A-5B7, Canada
Keywords:
Vanishing Points, Point of Gaze (PoG), Eye Tracking, Gaussian Process Regression (GPR).
Abstract:
This study aims to analyze driver cephalo-ocular behaviour features and road vanishing points with respect to
vehicle speed in urban and suburban areas using data obtained from an instrumented vehicle’s eye tracker. This
study utilizes two models for driver gaze estimation. The first model estimates the 3D point of the driver’s gaze
in absolute coordinates obtained through the combined use of a forward stereo vision system and an eye-gaze
tracker system. The second approach uses a stochastic model, known as Gaussian Process Regression (GPR),
that estimates the most probable gaze direction given head pose. We evaluated models on real data gathered
in an urban and suburban environment with the RoadLAB experimental vehicle.
1 INTRODUCTION
The human visual system collects about 90% of the
information that is needed to adequately perform driv-
ing tasks (Sivak, 1996). Driver gaze has been studied
for many years in driving simulators and real driving
environments. It has been demonstrated that driver
gaze direction in relation to the surrounding driving
environment is predictive of driver maneuvers (Khair-
doost et al., 2020). In addition to these results, our
aim is to elucidate the rules that govern driver gaze
with respect to the characteristics of vehicular dy-
namics. In particular, this contribution reports on our
investigation of the relationship that exists between
gaze behaviour, vanishing points, and vehicle speed.
1.1 Literature Survey
Driver visual attention plays a prominent role in
intelligent Advanced Driver Assistance Systems (i-
ADAS). Some driver monitoring systems utilize the
driver’s head pose and eyes to evaluate the driver’s
gaze-direction and zone (Jha and Busso, 2018;
Shirpour et al., 2020). We recently presented a
stochastic model that derives gaze direction from head
pose data provided by a contactless gaze tracking sys-
tem (Shirpour et al., 2020). This model computes a
probabilistic visual attention map that estimates the
probability of finding the actual gaze over the stereo
system’s imaging plane, with a Gaussian Process Re-
gression (GPR) technique. Subsequently, we pro-
posed a deep learning model to predict driver eye fix-
ation according to driver’s visual attention (Shirpour.
et al., 2021). In addition, other contributions use the
direction of gaze to detect 2D image gaze regions
(Shirpour et al., ; Zabihi et al., 2014). Others have
defined a framework that uses the 3D Point of Gaze
(PoG) and Line of Gaze (LoG) in absolute coordi-
nates for similar purposes (Kowsari et al., 2014).
In other works, the driver’s attentional visual area
was modelled as intersection of the elliptical region
formed by the cone emanating from the eye posi-
tion with the LoG as its symmetrical axis along its
length, with the imaging plane of the forward stereo-
scopic vision system installed in the experimental ve-
hicle, as depicted in Figure 1. Using this mechanism,
several authors were able to estimate the driver’s
most probable next maneuver some time before it oc-
curred (Khairdoost et al., 2020; Zabihi et al., 2017).
Their evaluation showed a strong relationship be-
tween driver gaze behaviour and maneuvers.
In general, a driver concentrates on parts of the
driving scene that contain some objective and subjec-
tive elements. Objective elements are obtained with
bottom-up approaches that consider features extracted
from the driving environment such as traffic-related
objects. On the other hand, subjective elements are
obtained with top-down approaches and are attributed
to a driver’s internal factors, such as experience or in-
tention (Deng et al., 2016). Top-down strategies pro-
vide insight into what a driver’s gaze could be fixated
on while driving.
Shirpour, M., Beauchemin, S. and Bauer, M.
What Does Visual Gaze Attend to during Driving?.
DOI: 10.5220/0010440204650470
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 465-470
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
465

Figure 1: The attentional area is defined as intersection
of the elliptical region formed by the cone cone emanat-
ing from the eye position with the LoG as its symmetrical
axis along its length, and the imaging plane of the forward
stereoscopic vision system.
1.2 Human Vision System
The human visual field affords a remarkably broad
view of the world, in the range of 90
◦
to the left
and right, and more than 60
◦
above and below the
gaze (Wolfe et al., 2017). Information within 2
◦
of
the gaze is processed in foveal vision. More broadly,
parafoveal vision covers up to 6
◦
of visual angle (En-
gbert et al., 2002). This implies that the existing in-
formation in the parafovea is combined with that from
the fovea. The information from the fovea is clearer
when compared with the information present in the
parafovea (Kennedy, 2000). Together, the foveal and
parafoveal areas are known as the central visual field,
where objects are clearly and sharply seen and used
to perform most activities (Wolfe et al., 2017).
1.3 Experimental Vehicle
Our research vehicle is equipped with instruments
that capture driver-initiated vehicular actuation and
relate the 3D driver gaze direction on the imaging
plane of the forward stereoscopic vision system. The
vehicle was used to gather data sequences from 16 dif-
ferent test drivers on a pre-determined 28.5km route
within the city of London, Ontario, Canada. 3TB
of driving sequences were recorded. The data con-
tains significant driving information, including for-
ward stereo imaging and depth, 3D PoG and head
pose, and vehicular dynamics obtained with the OB-
DII CANBus interface. Image and data frames are
collected at a rate of 30Hz. The vehicular instrumen-
tation consists of a non-contact infrared remote gaze
and head pose tracker, with two cameras mounted on
the vehicle dashboard, operating at 60Hz. This instru-
ment provides head movement and pose, eye position,
and gaze direction within its own coordinate system.
A forward stereoscopic vision system is located on
the vehicle’s roof to capture frontal view information
such as dense stereo depth maps at 30 Hz (See Figure
2). Details concerning this instrumentation are avail-
able in (Beauchemin et al., 2011). The sum of our
data was recorded with the RoadLAB software sys-
tem, as shown in Figure 3.
2 METHODOLOGY
This Section presents two models for describing
driver gaze visual attention in the forward stereo
imaging system. Section 2.1 addresses the calibra-
tion procedure applied to provide the Point of Gaze
(PoG) onto the imaging plane of the forward stereo
system. We introduce a Gaussian Process Regression
(GPR) that estimates the probability of gaze direction
according to driver head pose in Section 2.2. Section
2.3 describes the technique we employ to locate van-
ishing points from the stereoscopic imagery.
2.1 Projection of PoGs Onto Stereo
System
The calibration process brings the eye tracker data
into the coordinate system of the forward stereoscopic
vision system. We used a cross-calibration technique
developed in our laboratory to transform the 3D driver
gaze expressed in the eye tracker reference frame to
that of forward stereoscopic vision system (Kowsari
et al., 2014). This calibration process is defined as
follows:
• Salient Points Extraction: A sufficient number of
salient points are extracted from the stereoscopic
imagery (around 20 points provide sufficient data)
• Depth Estimation: The driver’s eye fixates on pre-
selected salient points for a short period (about 2
seconds). The depth estimate of the salient point,
the gaze vector, and the position of the eye centre
are recorded.
• Estimation of Rotation and Translation Matrices:
The process estimates the rigid body transforma-
tion between the reference frame of the stereo-
scopic system and the remote eye tracker. The el-
ements composing this transformation are known
as extrinsic calibration parameters.
• Gaze Projection Onto the Imaging Plane of
Stereoscopic System: The LoG, expressed in eye
tracker coordinates, is projected onto the imaging
plane of the stereo system using the extrinsic cal-
ibration parameters. The PoG is determined as
the location where the LoG intersects with a valid
depth estimate within the reference frame of the
stereo vision system.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
466

Figure 2: (left): Stereo vision system located on the vehicle’s roof; (centre): infrared gaze tracker; (right:) FaceLAB system
interface.
Figure 3: RoadLab software systems: The on-board system
displays frame sequences with depth maps, dynamic vehicle
features, and eye-tracker data.
2.2 Gaussian Process Regression
Technically, direct use of gaze is complicated by the
fact that eyes may exhibit rapid saccadic movements
resulting in difficulties for assessing the correct im-
age area corresponding to a driver’s visual attention.
Our laboratory proposed another model to alleviate
this problem by approximating the 3D gaze from the
3D head pose, as the head does not experience sac-
cadic movements.
In our recent research, instead of directly estimat-
ing the gaze, which depends on the driver’s visual
cognitive tasks, we introduced a stochastic model for
representing driver visual attention. This model in-
herits the advantage of the Gaussian Process Regres-
sion (GPR) technique to estimate the probability of
the driver’s gaze direction according to head pose over
the imaging plane of the stereo system. It establishes
a confidence area within which the driver gaze is most
likely contained. We have shown that drivers concen-
trate most of their attention on the 95% confidence
interval region estimated from the head pose. We re-
fer the reader to (Shirpour et al., 2020) for details on
the GPR technique.
Figure 4: Examples of vanishing points (from left to right:)
input frames, voting map, and detected vanishing points.
2.3 Vanishing Points
A vanishing point is the location on the image plane
where two-dimensional perspective projections of
mutually parallel lines in three-dimensional space ap-
pear to converge. The vanishing point plays an essen-
tial role in the prediction of driver eye fixations. In
general, vanishing points are considered as guidance
for predicting driver intent, as drivers mostly gaze at
traffic objects near those points.
Available methods to detect the vanishing point
are mainly edge, region, or texture-based models.
Edge-based models are adequate when edge bound-
aries and lane markings are available within the driv-
ing scene. Region-based methods divide the driving
view into path and non-path according to low-level
features (colour, intensity, etc). These two types of
models are suitable for structured roads. They experi-
ence difficulty with scenery involving unstructured or
complex features.
Because the RoadLab dataset includes both struc-
tured and unstructured imaging elements, we adopted
What Does Visual Gaze Attend to during Driving?
467
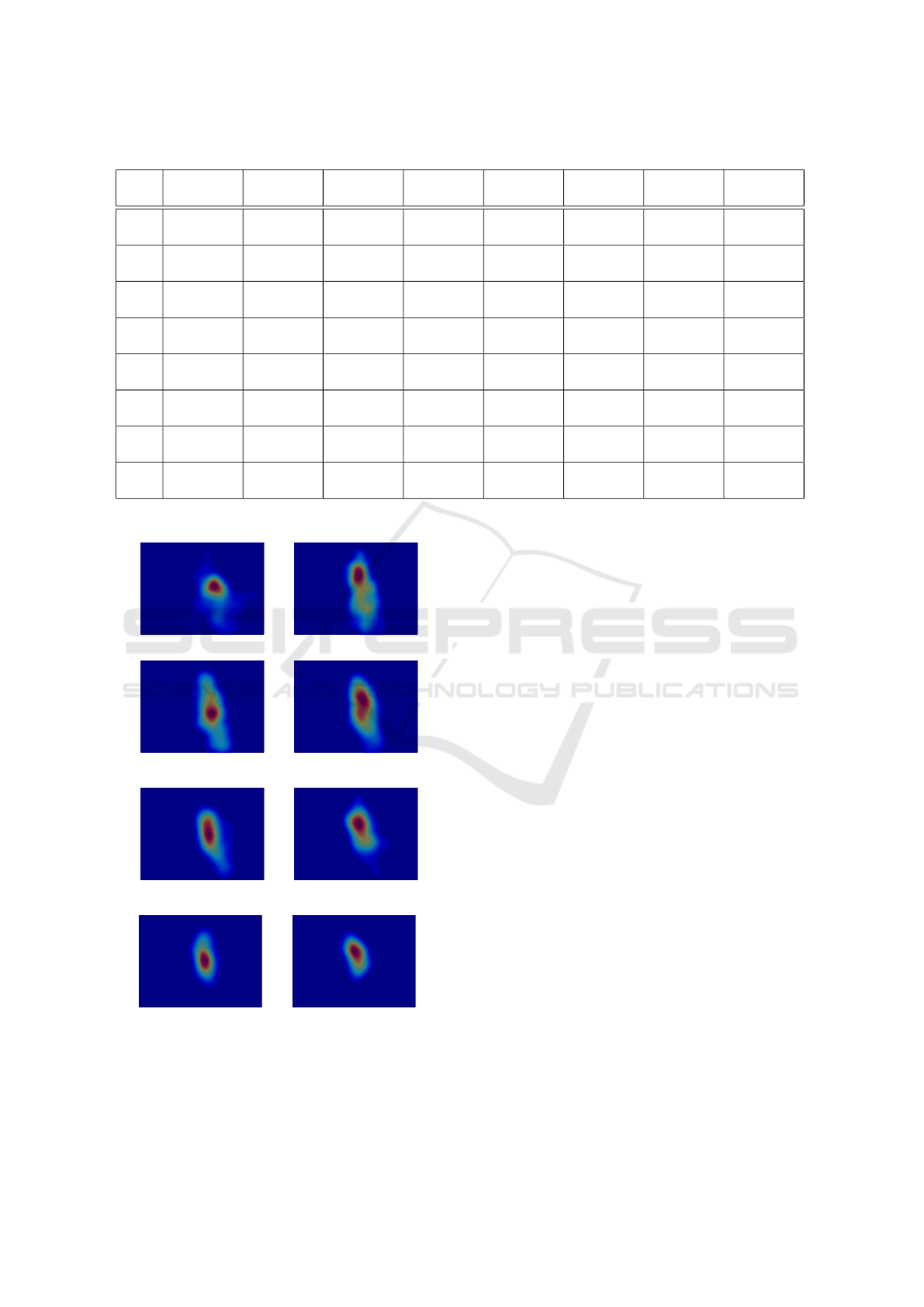
Table 1: Data Description.
Seq# 0≤Speed
<10
10≤Speed
<20
20≤Speed
<30
30≤Speed
<40
40≤Speed
<50
50≤Speed
<60
60≤Speed
<70
Speed≥70
Seq.
2
11530 2693 3181 4426 4475 3930 4371 2350
Seq.
8
8515 2556 2959 3297 3594 3679 2157 2543
Seq.
9
7756 2544 3263 4197 3131 3148 3169 2166
Seq.
10
7199 1538 2068 3912 4665 4200 3042 1211
Seq.
11
8008 1714 2425 3373 3417 3330 2954 887
Seq.
13
11545 1956 2098 2248 2447 2711 3528 2605
Seq.
14
4495 1123 1311 1986 2285 2442 1204 1448
Seq.
16
9056 2085 2440 3046 2874 3321 1241 1628
(a) 0 ≤ Speed < 10 (b) 10 ≤ Speed < 20
(c) 20 ≤ Speed < 30 (d) 30 ≤ Speed < 40
(e) 40 ≤ Speed < 50 (f) 50 ≤ Speed < 60
(g) 60 ≤ Speed < 70 (h) Speed ≥ 70
Figure 5: Driver attention versus vanishing point with re-
spect to speed. a) to h): As the speed increases, the driver
gaze converges to the vanishing point.
a texture-based model proposed by (Moghadam et al.,
2011). Their model is based on Gabor filters to esti-
mate the local orientation of pixels. Figure 4 shows
a sample of RoadLab frames with detected vanishing
points.
3 ANALYSIS OF DRIVER
ATTENTION
In this Section, we describe the preprocessing we ap-
plied to the RoadLAB dataset and provide an analysis
of the results that were obtained.
3.1 Data Preparation
Our experimental vehicle relies on sensors and cam-
eras to track its driver’s behavioural features. The
RoadLab software provided a confidence measure on
the quality of its estimations of head pose and gaze.
The head pose confidence measure ranged from 0 to
2, while the gaze quality metric ranged from 0 to 3.
We considered the head pose and gaze as reliable el-
ements when these metrics had a minimum value of
1 or higher for the head pose, and 2 or higher for the
gaze. The PoGs that passed the quality metric thresh-
olds were projected onto the forward stereo system
for the 5 preceding consecutive frames. Table 1 pro-
vides the number of frames selected from test drivers
according to vehicular speed.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
468
10 20 30 40 50 60 70 80
Speed (Km/h)
1.4
1.5
1.6
1.7
1.8
1.9
2
2.1
Distance
For each Subject
Subject2
Subject8
Subject9
Subject10
Subject11
Subject13
Subject14
Subject16
10 20 30 40 50 60 70 80
Speed (Km/h)
1.3
1.35
1.4
1.45
1.5
1.55
1.6
1.65
1.7
1.75
Distance
Average of Subject
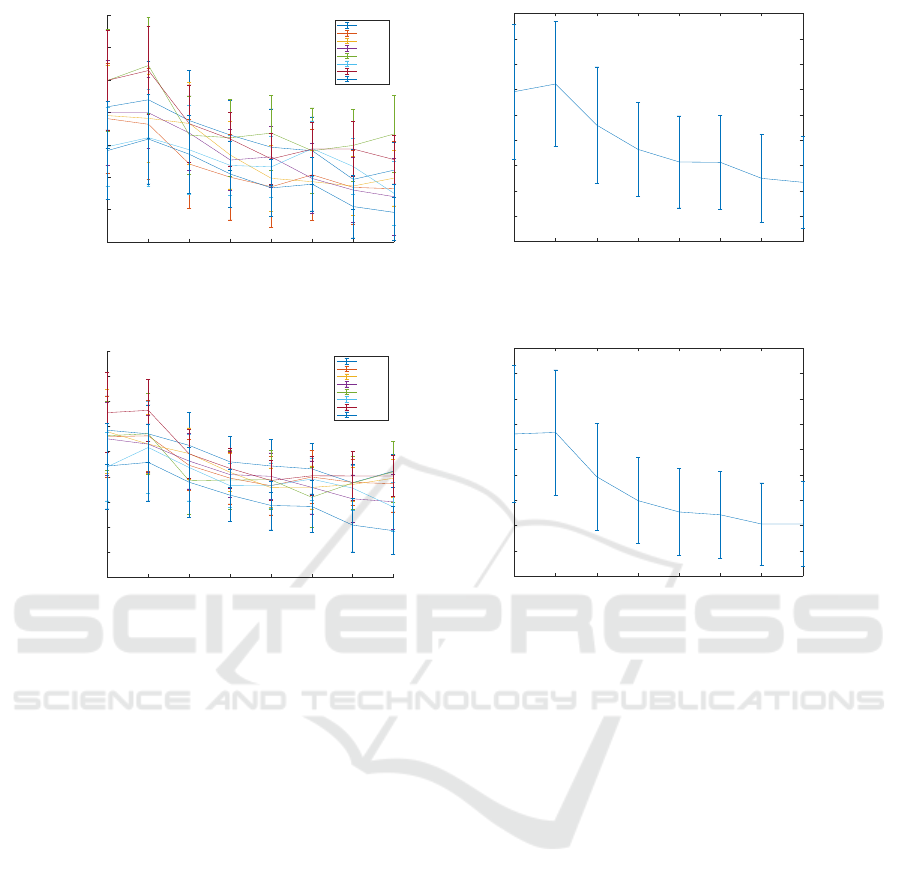
Figure 6: Model A (Left): Average and variance of distance from driver gaze fixation to vanishing point versus vehicle speed
for each driver. (right): Average of all drivers.
10 20 30 40 50 60 70 80
Speed (Km/h)
1.4
1.5
1.6
1.7
1.8
1.9
2
2.1
2.2
2.3
Distance
For each Subject
Subject2
Subject8
Subject9
Subject10
Subject11
Subject13
Subject14
Subject16
10 20 30 40 50 60 70 80
Speed (Km/h)
1.45
1.5
1.55
1.6
1.65
1.7
1.75
1.8
1.85
1.9
Distance
Average of Subject
Figure 7: Model B (Left): Average and variance of distance from driver gaze fixation to vanishing point versus vehicle speed
for each driver. (right): Average of all drivers.
3.2 Speed and Visual Attention Analysis
Our results show that drivers generally tend to con-
centrate their gaze on vanishing points created by the
motion of the vehicle. Figure 5 illustrates the fact that
the frequency of driver gaze fixations near the vanish-
ing point is considerably higher than that of fixations
on other image regions. This indicates that driver at-
tention is more likely to fixate on traffic objects near
the vanishing point. Also, Figure 5 illustrates how
the gaze position changes at different vehicle speeds
(for one particular driving sequence). When the vehi-
cle speed smoothly increases from below 10 km/h to
over 70 km/h, the gaze position rapidly converges to
the vanishing point.
We estimated driver visual attention with two dif-
ferent models for gaze direction: model A which esti-
mates the probability of driver gaze direction accord-
ing to head pose, and model B which directly uses
the 3D driver gaze in absolute coordinates. We mea-
sured the logarithmic distance of gazes from vanish-
ing points and calculated the averages and variances
of these distances for a range of vehicle speeds. As
observed in Figures 6 and 7 the average distance of
gaze fixations and vanishing points decreases signifi-
cantly with an increase in vehicle speed. These results
show that the drivers were more focused on vanish-
ing points at high the vehicle speeds. The variance of
gaze fixations at high vehicular speeds is significantly
lower than that observed at lower speeds.
The human visual system is limited in the quantity
of information it is able to process per time unit, and
compensates by decreasing its visual field when the
mass of elements to process in the spatial or temporal
context increases. In driving circumstances, this gen-
erally occurs at high speeds, as the amount of avail-
able information per unit of time increases propor-
tionally.
4 CONCLUSIONS
We analyzed driver gaze behaviour in relation to
vanishing points with respect to increasing vehicu-
lar speeds with the RoadLab dataset obtained from an
instrumented vehicle. This research investigated two
models for driver gaze estimation. The first model es-
timated 3D point of gaze in absolute coordinate, while
the second model used a probabilistic process to esti-
What Does Visual Gaze Attend to during Driving?
469

mate the probability of driver gaze direction based on
the head pose. For both models, the results clearly
indicate that vanishing points attract driver gaze with
increasing force at high vehicle speeds.
REFERENCES
Beauchemin, S., Bauer, M., Kowsari, T., and Cho, J. (2011).
Portable and scalable vision-based vehicular instru-
mentation for the analysis of driver intentionality.
IEEE Transactions on Instrumentation and Measure-
ment, 61(2):391–401.
Deng, T., Yang, K., Li, Y., and Yan, H. (2016). Where does
the driver look? top-down-based saliency detection in
a traffic driving environment. IEEE Transactions on
Intelligent Transportation Systems, 17(7):2051–2062.
Engbert, R., Longtin, A., and Kliegl, R. (2002). A dy-
namical model of saccade generation in reading based
on spatially distributed lexical processing. Vision Re-
search, 42(5):621–636.
Jha, S. and Busso, C. (2018). Probabilistic estimation of
the gaze region of the driver using dense classifica-
tion. In International Conference on Intelligent Trans-
portation Systems, pages 697–702. IEEE.
Kennedy, A. (2000). Parafoveal processing in word recog-
nition. The Quarterly Journal of Experimental Psy-
chology A, 53(2):429–455.
Khairdoost, N., Shirpour, M., Bauer, M., and Beauchemin,
S. (2020). Real-time maneuver prediction using lstm.
IEEE Transactions on Intelligent Vehicles, 5(4):714–
724.
Kowsari, T., Beauchemin, S., Bauer, M., Laurendeau,
D., and Teasdale, N. (2014). Multi-depth cross-
calibration of remote eye gaze trackers and stereo-
scopic scene systems. In Intelligent Vehicles Sympo-
sium, pages 1245–1250. IEEE.
Moghadam, P., Starzyk, J. A., and Wijesoma, W. (2011).
Fast vanishing-point detection in unstructured envi-
ronments. IEEE Transactions on Image Processing,
21(1):425–430.
Shirpour, M., Beauchemin, S., and Bauer, M. (2020). A
probabilistic model for visual driver gaze approxima-
tion from head pose estimation. In Connected and Au-
tomated Vehicles Symposium, pages 1–6. IEEE.
Shirpour., M., Beauchemin., S. S., and Bauer., M. A.
(2021). Driver’s eye fixation prediction by deep neu-
ral network. In Proceedings of the 16th International
Joint Conference on Computer Vision, Imaging and
Computer Graphics Theory and Applications - Vol-
ume 4 VISAPP: VISAPP,, pages 67–75. INSTICC,
SciTePress.
Shirpour, M., Khairdoost, N., Bauer, M. A., and Beau-
chemin, S. S. Traffic object detection and recognition:
A survey and an approach based-on the attentional vi-
sual field of driver. IEEE Transactions on Intelligent
Vehicles (in press).
Sivak, M. (1996). The information that drivers use: is it
indeed 90% visual? Perception, 25(9):1081–1089.
Wolfe, B., Dobres, J., Rosenholtz, R., and Reimer, B.
(2017). More than the useful field: Considering
peripheral vision in driving. Applied ergonomics,
65:316–325.
Zabihi, S., Beauchemin, S., and Bauer, M. (2017). Real-
time driving manoeuvre prediction using io-hmm and
driver cephalo-ocular behaviour. In Intelligent Vehi-
cles Symposium, pages 875–880. IEEE.
Zabihi, S., Beauchemin, S., De Medeiros, E., and Bauer,
M. (2014). Frame-rate vehicle detection within the at-
tentional visual area of drivers. In Intelligent Vehicles
Symposium, pages 146–150. IEEE.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
470
