
Water Hazard Depth Estimation for Safe Navigation of Intelligent
Vehicles
Zoltan Rozsa
1,2 a
, Marcell Golarits
1 b
and Tamas Sziranyi
1,2 c
1
Machine Perception Research Laboratory of Institute for Computer Science and Control (SZTAKI), E
¨
otv
¨
os Lor
´
and
Research Network (ELKH), H-1111 Budapest, Kende u. 13-17, Hungary
2
Faculty of Transportation Engineering and Vehicle Engineering, Budapest University of Technology and Economics
(BME-KJK), H-1111 Budapest, M
˝
uegyetem rkp. 3, Hungary
Keywords:
Intelligent Vehicles, Machine Vision, Point Cloud Processing, Plane Fitting, Segmentation, Multi-media
Photogrammetry.
Abstract:
This paper proposes a method to provide depth information about water hazards for ground vehicles. We can
estimate underwater depth even with a moving mono camera. Besides the physical principles of refraction,
the method is based on the theory of multiple-view geometry and basic point cloud processing techniques. We
use the information gathered from the surroundings of the hazard to simplify underwater shape estimation.
We detect water hazards, estimate its surface and calculate real depth of underwater shape based on matched
points using refraction principle. Our pipeline was tested on real-life experiments, on-board cameras and a
detailed evaluation of the measurements is presented in the paper.
1 INTRODUCTION
There are scenarios where water depth needs to be es-
timated, but the camera is the only viable sensor op-
tion. For example, it is not worth using specific sen-
sors; using active sensors should be avoided (Rankin
and Matthies, 2010), or simply because installing dif-
ferent kinds of sensors is not possible (for example, to
an UAV - Unmanned Aerial Vehicle). Also, solving
the problem with cameras can be a relatively cheap
solution or increase the redundancy (and the reliabil-
ity) of the whole system applying together with other
sensors.
We propose to apply the proposed method in au-
tonomous driving (or driver assistance) in an off-road
(or on-road with potholes, Figure 1) environment.
During or after heavy raining the probability of ac-
cidents increases (Song. et al., 2020). Puddles can
form, which depth needs to be estimated to decide
whether the vehicle can wade through safely the water
or search for a bypass route.
Bathymetric (the discipline of determining the
depth of the ocean or lake floors) mapping is usu-
a
https://orcid.org/0000-0002-3699-6669
b
https://orcid.org/0000-0001-9652-4148
c
https://orcid.org/0000-0003-2989-0214
ally done with specific active equipment like SoNAR
or LIDAR (Costa et al., 2009). Recently, to con-
struct Digital Elevation Models (DEMs), satellite and
UAV (Unmanned Aerial Vehicle) images are also ap-
plied in shallow water bathymetry. These methods (as
shown later) apply simplifications of the problem due
to the high-altitude imaging. However, in the case of
ground vehicles, the incidence ray going the camera
is not close to being perpendicular to the water sur-
face in general. (As this would require the vehicle to
be above the water surface.) Our correction solution
is defined in a general coordinate system for general
vehicle (and camera) pose, which has not been done
before.
(a) Own photograph (b) Source: www.totalcar.hu
Figure 1: Illustration of roads with potholes after raining.
We propose a pipeline to get a deterministic so-
lution of the depth in an underwater surface with a
90
Rozsa, Z., Golarits, M. and Sziranyi, T.
Water Hazard Depth Estimation for Safe Navigation of Intelligent Vehicles.
DOI: 10.5220/0010438100900099
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 90-99
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

mono camera above the water. The workflow can be
used with a stereo camera pair or a mono camera (in
case of correct scaling) as well. We will show exam-
ples for both cases. In the stereo case, the absolute
scaling is given and we have a stereo reconstruction
problem, while in the mono camera case we deal with
the Structure from Motion (SfM) problem.
1.1 Contributions
The paper contributes to the following:
• Novel methodology is proposed to estimate water
depth with a mono (or stereo) camera.
• Basic refraction theory of optics is combined with
geometry-based point cloud processing.
• There are no restrictions to camera (vehicle) pose.
Besides the theory, practical applications are shown,
and evaluation is presented about the proposed
method’s performance.
1.2 Outline of the Paper
The paper is organized as follows: Section 2 sur-
veys the literature about the related works. Section
3 describes the proposed pipeline in detail. Section
4 shows our test results and Section 5 discuss them.
Finally, Section 6 draws the conclusions.
2 RELATED WORKS
For autonomous navigation or ADAS (Advanced
Driver Assistance System) purposes, researches deal-
ing with water hazard detection has a relatively long
history, papers related to this topic were first pub-
lished more than a decade ago (Xie et al., 2007).
Since than there were numerous solution proposed
to this problem based on handcrafted features from
texture and color (Zhao et al., 2014), spatio-temporal
features (Mettes et al., 2017), MRF (Haris and Hou,
2020) models, polarization (Nguyen et al., 2017) or
active sensors (Chen et al., 2017). The current state
of the art employes deep learning techniques for this
task (Han et al., 2018), (Qiao et al., 2020). So there
is a wide range of solutions for the detection task. We
go further, and improve the detection with water depth
estimation.
The detection can result in an avoid (if it is pos-
sible) or slow down command, but as the depth of
the hazard is unknown, the degree of deceleration
required (to maintain the vehicle’s and passengers’
health) is unknown. In an off-road environment, the
consequences of traversing through a water hazard (at
a given speed) can be even more extreme, and the de-
cision even more critical. For example, the traversable
path of an off-road vehicle can be crossed with a
brooklet. The depth of the brooklet (can be much
deeper than a pothole filled with water) must be care-
fully assessed, as finding a pass through the booklet
can be very time consuming, but wading through it
may cause severe damage to the mechanic and elec-
tronic parts of the vehicle. That is why we propose a
method to estimate the (real) depth of still water based
on vision.
The problems of multi-medium photogrammetry
is an interest of computer vision and geodesy com-
munity for decades (Fryer, 1983) (Shan, 1994). The
21
st
century advancement of the topic related to com-
puter vision is mainly based on the theory of (Agrawal
et al., 2012) and (Chari and Sturm, 2009). The first
ones state that the n-layer flat refraction system cor-
responds to an axial camera. The second one lays the
foundation for determining fundamental matrices in
the presence of refraction.
Recent literature primarily related to machine vi-
sion in this topic mostly tries to estimate relative cam-
era motion and build the structure from motion model
from underwater images (Kang et al., 2012) (Jordt-
Sedlazeck and Koch, 2013). Instead of doing that, we
will use the reconstruction of the shore environment,
which is not affected by the refraction. Besides, (Mu-
rai et al., 2019) uses a multi-wavelength camera to re-
construct surface normals, and (Qian et al., 2018) pro-
posed a method to reconstruct the water surface with
the underwater scene simultaneously. They used four
cameras, which makes the application hard in prac-
tice.
Results rather related to bathymetry are closer to
the practical application (Terwisscha van Scheltinga
et al., 2020) of multi-medium photogrammetry, as in
most cases are trying to minimize the effect of refrac-
tion in depth estimation. The bathymetry researches
below are the most related to our work, but they
cannot be compared to ours as they examine com-
pletely different water areas in completely different
circumstances. As they use high altitude images, of-
ten significant simplifications are made (e.g., the un-
derwater depth and camera height ratio is negligible,
ray direction is approximately perpendicular to the
water surface) (Dietrich, 2017) or parameters gener-
ally unknown are used for the calculation (e.g., sea
level from GPS data) (Agrafiotis et al., 2020). Re-
fraction can be corrected analytically (Maas, 2015)
or iteratively (Skarlatos and Agrafiotis, 2018) with
prior knowledge. In recent research, (Agrafiotis et al.,
2019) machine learning technique was also applied to
correct the refraction.
Water Hazard Depth Estimation for Safe Navigation of Intelligent Vehicles
91

The advantages of our proposed method compared
to the literature:
• We solve the problem in a general coordinate sys-
tem. This way, simplifications (comes from cam-
era pose and motion) are not necessary.
• Extra or specific sensors are not required.
• The solution can be determined explicitly.
3 THE PROPOSED METHOD
There are a few features of water hazards, which we
utilize in the paper:
• The water in them is approximately still, so its sur-
face is considered to be planar in the examined
area. (We do not consider wave effects like (Fryer
and Kniest, 1985).)
• The hazards are surrounded by road or traversable
path; thus, we do not need underwater SfM.
Ground parts of the images can be used for rela-
tive camera motion estimation. Note: This is only
important in the mono camera case, as, in the case
of stereo camera rig, the relative pose of the cam-
eras is known.
The proposed pipeline can be divided into the follow-
ing main steps:
1. Preprocessing (From calibration to detection of
water hazards)
2. Estimating water surface (plane fitting in the cam-
era coordinate system) in order to find ray-surface
intersection point
3. Calculating underwater depth (Triangulation and
correction based on Snell’s law)
3.1 Preprocessing
In the following, we will indicate the preprocessing
steps for both mono and stereo camera cases. Note:
We designed our method to be able to work with us-
ing only a single camera (and a stereo camera rig as
well). However, in a real-time application, we suggest
applying the stereo camera solution (as it simplifies
the problem.) Mono camera solution is important in
this case too, to increase the reliability of the system.
First, the intrinsic camera parameters of the
cameras has to be determined, and in the case of
a stereo camera pair, the rotation and translation of
the second camera relative to the first one as well
(Heikkila and Silven, 1997) (Zhang, 2000).
Next, the environment reconstruction is to be
done, and the relative camera poses estimated in case
of a mono camera. COLMAP (Sch
¨
onberger and
Frahm, 2016) (Sch
¨
onberger et al., 2016) is used in our
experiments to robustly reconstruct the surroundings.
In the case of stereo cameras, the disparity map of the
scene needs to be computed. We used semi-global
matching to do that during our tests (Hirschmuller,
2005). Based on that and the stereo parameters, we
can reconstruct the scene.
The resulted point cloud is scaled to the global
scale to measure the depth in the metric system. In
our proof of concept mono camera experiments, we
scaled the reconstructions manually based on land-
marks with measured size (e.g., paving stone, a lane
divider line, etc.) to evaluate the method without the
scaling error. In a driving application, landmarks with
available extension also can be used for the scaling;
but we propose to use GPS, IMU, or any other sen-
sors which provide odometry data (Mustaniemi et al.,
2017). The point cloud can be scaled using the scale
ratio between the camera distances and the odometry
data. Naturally, if stereo cameras are used, the scal-
ing step can be ignored as we know the translation
between the two cameras in an absolute scale (from
the calibration step).
Finally, the puddle and water region must be seg-
mented. This segmentation can be done for the state
of the art performance, with the method of (Han et al.,
2018) where water hazards are searched (the depth of
these hazards are not estimated there). We trained a
DeepLab v3 network (Chen et al., 2018) for this pur-
pose, using the dataset of (Han et al., 2018) and own
measurements (example output of the used segmen-
tation network can be seen in Figure 2). The reason
for that is (Chen et al., 2018) utilizes reflection atten-
tion units (RFA), but we would like to avoid that as
we may enhance our images by polar filtering (most
of the reflections), as matching underwater points is
important for depth estimation. (Also, looking the
comparison in (Chen et al., 2018) earlier Deeplab -
v1 performance is not much worse than the method
they propose.) Note: The polar filtering is not nec-
essary (only a tiny portion of our test image acquired
this way), and also depth estimation and water hazard
detection can be executed with different cameras.
It is important to detect water hazards in appro-
priate distance, so the vehicle can slow down as it
approaches. For that reason, we can apply separate
cameras (with different poses) for detection and depth
estimation purposes. This setup can also be useful
in that respect, that θ
1
value should be maximized
around (45-60 degree) to see the underwater surface
properly (Figure 3). In that case, the problem of si-
multaneously seeing far (for detection of hazards in
time) and seeing near (to estimate underwater depth)
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
92
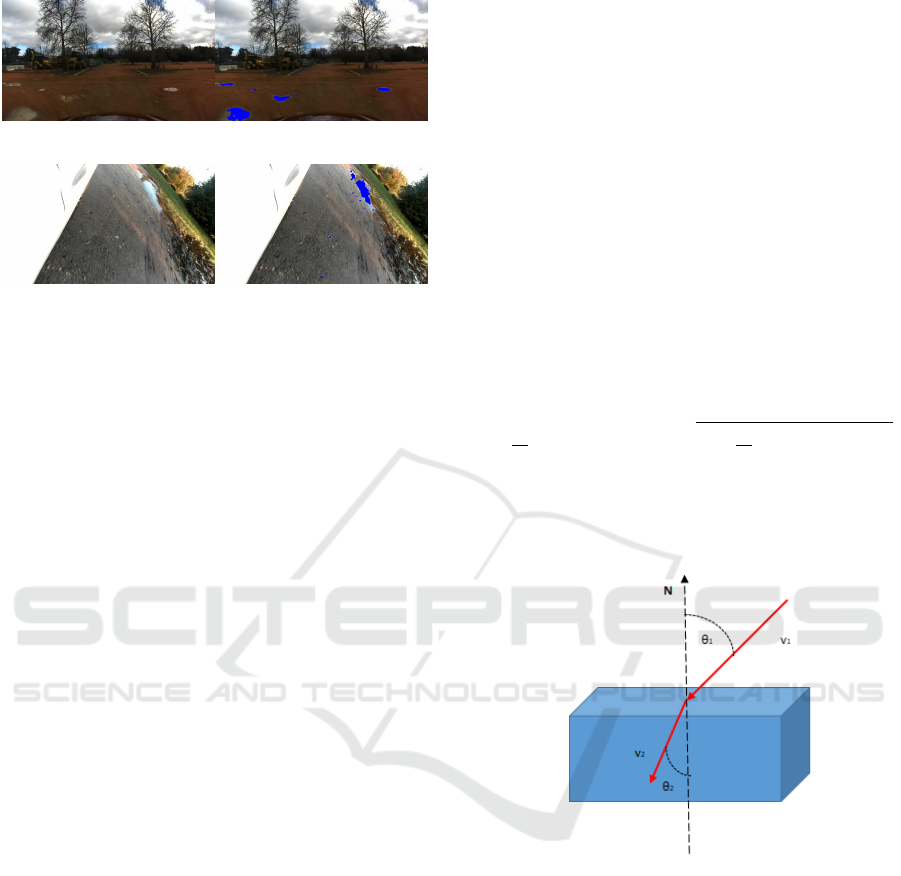
(a) Original frame (b) Segmented water hazards
(c) Original frame (own) (d) Segmented water hazards
(own)
Figure 2: Illustration of the DeepLab v3 (Chen et al.,
2018) network trained for water hazard segmentation on the
dataset of (Han et al., 2018) and own stereo camera data.
The segmented hazards are illustrated with blue color.
rises. However, with an appropriate camera installa-
tion, we can do both tasks with one camera. As 3D
environment reconstruction of the scene is continu-
ously made, it is enough to segment the water hazard
area only in one image to label the 3D scene for the
hazardous areas (alternatively water hazards can be
tracked through the scenes (Nguyen et al., 2017)),
3.2 Estimating Water Surface
To get a deterministic solution for the underwater
depth in the scale of the reconstruction of the sur-
roundings, we use the previously reconstructed point
cloud. We assume that the shore around the puddle
lies in the same plane as the water surface, or at least
it has the same normal, and the offset to the water sur-
face can be estimated from the reconstruction (tests
with artificial containers). Thus, in general, we esti-
mate the ground plane’s parameters with MSAC (Torr
and Zisserman, 2000), and we use the same param-
eters to describe the water surface. Alternatively, a
gyroscope can be used to determine the z direction
- the surface normal of the water - and knowing the
camera’s installation position can be enough to esti-
mate this plane’s offset. However, we propose to use
our proposed pipeline, as it is a more general solution
that can work in off-road scenarios with elevation and
angle differences in the path.
Our previous estimation of water hazard regions
can be made more precise with the ground model. As
triangulated points (without refraction correction) be-
low, this plane will correspond to the underwater sur-
face.
3.3 Calculating Underwater Depth
Our goal is to determine the underwater surface’s
true depth (using corresponding point pairs on the
images). Now, the camera positions and the water
surface are known. We can explicitly calculate the
X, Y , and Z coordinates of the previously matched
underwater points based on the following equations
(lens distortion effects have been already corrected).
Snell’s law is usually given in the scalar form :
n
1
· sinθ
1
= n
2
· sinθ
2
(1)
where n
1
and n
2
are the refraction indices of the
medium and θ
1
and θ
2
are the incidence and refrac-
tion angles.
Rewriting in vector form and rearranging it gives
for v
2
(the refraction vector) (Skarlatos and Agrafio-
tis, 2018):
v
2
=
n
1
n
2
[N × (−N × v
1
)] − N
r
1 −
n
1
n
2
2
(N × v
1
)(N ×v
1
)
(2)
where v
1
is the incidence vector, and N is the wa-
ter’s surface normal. The illustration can be seen in
Figure 3.
Figure 3: Illustration of Snell’s law.
Knowing the given camera’s intrinsic and extrin-
sic parameters, the projection matrix in a general co-
ordinate system can be written as:
C = I · T (3)
where I is the intrinsic matrix, and T is the 3x4 homo-
geneous transformation matrix transforming from the
global coordinate system to the camera coordinates.
The projection equation of a 3D point given by ho-
mogeneous global coordinates A = [X Y Z 1] to
an image point given by homogeneous image coordi-
nates a = [u v 1] can be rearranged to the form:
M · [X Y Z 1]
T
= 0 (4)
where the M matrix is:
Water Hazard Depth Estimation for Safe Navigation of Intelligent Vehicles
93

C
1,1
− uC
3,1
C
1,2
− uC
3,2
C
1,3
− uC
3,3
C
1,4
− uC
3,4
C
2,1
− vC
3,1
C
2,2
− vC
3,2
C
2,3
− vC
3,3
C
2,4
− vC
3,4
(5)
here C
i, j
are the elements of projection matrix in the
i
th
row and j
th
coloumn.
Equation 4 can be considered as equation of two
planes intersecting in a line which will be the ray of
projection through [u v] pixel coordinates. We can
determine the v
1
direction as the direction perpendic-
ular to the normal vectors of these planes (Figure 3).
v
1
= M
1
× M
2
(6)
where M
i
i = 1 : 2 indicates the first three elements
of i
th
row of matrix M.
In the following, to triangulate the underwater
depth in case of a given point correspondence, two
camera poses are assumed. (The equations can be eas-
ily extended to more than two camera poses, and the
point coordinates can be determined by optimization
instead of triangulation.)
In case of two camera positions C
1
and C
2
the in-
tersection points of the water surface A
1
and A
2
(given
by coordinates X
S
1
, Y
S
1
, Z
S
1
, X
S
2
, Y
S
2
and Z
S
2
) with
two rays in direction of v
11
(first camera) and v
12
(sec-
ond camera) can be determined by solving the equa-
tion system (Figure 4):
N
x
· X
S
i
+ N
y
·Y
S
i
+ N
z
· Z
S
i
= D (7)
A
i
= C
i
+t
1i
· v
1i
(8)
where N
x
, N
y
and N
z
are the coordinates of the nor-
mal vector of the water surface and D is the scalar in
the plane equation of the surface, t
1i
is the parameter
of the line equation, and i is the index of the given
camera pose.
After solving for A
1
and A
2
the underwater depth
can be triangulated by solving the following equation
system in a least-square sense for the point coordi-
nates P (Skarlatos and Agrafiotis, 2018) (Figure 4):
A
1
+t
21
· v
21
= A
2
+t
22
· v
22
= P (9)
Note: We referred to (Skarlatos and Agrafiotis,
2018) in case of two equations related to refraction
theory as they formalized these before us. However,
they do not use this in practice, as they utilized an em-
pirical formula to calculate a corrected focal length
for the water and do the correction on images (instead
of 3D coordinates). Their work is hardly comparable
to ours as they propose to use commercial software
and orthophotos for an entirely different purpose, cre-
ating digital surface models (DSM).
4 REAL-LIFE EXPERIMENTS
We have executed several experiments in different en-
vironments. We differentiate three types of tests we
have made, quantitative measurements with artificial
and natural water reservoirs with a mono camera, and
qualitative measurements with a stereo camera rig in-
stalled on a car.
In the following, the quantitative mono camera
(more complex computation) tests are presented. In
artificial reservoirs (e.g., pool), the underwater ge-
ometry is known or manually measured. Natural
reservoirs like puddles, water hazards in roads, and
brooklets were reconstructed (Figure 5). To generate
ground truth data in a natural reservoir, we created the
SfM model of the environment without the water in it,
manually registered the two point clouds, and the er-
ror is measured as the distance from each estimated
underwater points to the meshed surface. We gener-
ated ground truth data in this way for three scenes.
They were used in our quantitative evaluation.
Quantitative results of the proposed depth correc-
tion are illustrated in Figure 7, where we approxi-
mated with a linear regression of the error of the SfM
depth estimation and our one. The approximation is
based on about 3000 points from different scenes; on
average, about 7 frames were used for reconstruction.
If a point was visible from more than one view, we
averaged the triangulations and filtered the obviously
wrongly triangulated points above the water level. As
shown in the figure, in our evaluation there were nu-
merous points in the underwater depth range between
10 and 40 cm, but most of the points are below 10
cm (puddles). We neglected the number of measured
points deeper than 40 cm in the figure for better illus-
tration, as there were very few of them (they are ap-
proximately on the regression line) and also it is not
realistic to meet such deep potholes. As it is visible in
the figure, with our proposed correction, the error can
be approximated almost as a constant. The error of
SfM approximation is increasing with the depth. This
phenomenon is explained by Eq. 11 (in Section 5.2)
as it shows in the case of one viewpoint and a given
incidence angle, the apparent depth is linearly depen-
dent on the real one (with our correction, only other
errors of the process remain).
The mean absolute error in our tests with the pro-
posed correction was 2.15 cm, which is affected by
the triangulation error and by the accuracy of the
ground truth model (in the case of natural reservoirs).
That is why we did a separate evaluation for the cases
of artificial and natural reservoirs. Table 1 shows that
using our proposed correction pipeline gives a signifi-
cant improvement compared to the SfM baseline. Our
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
94
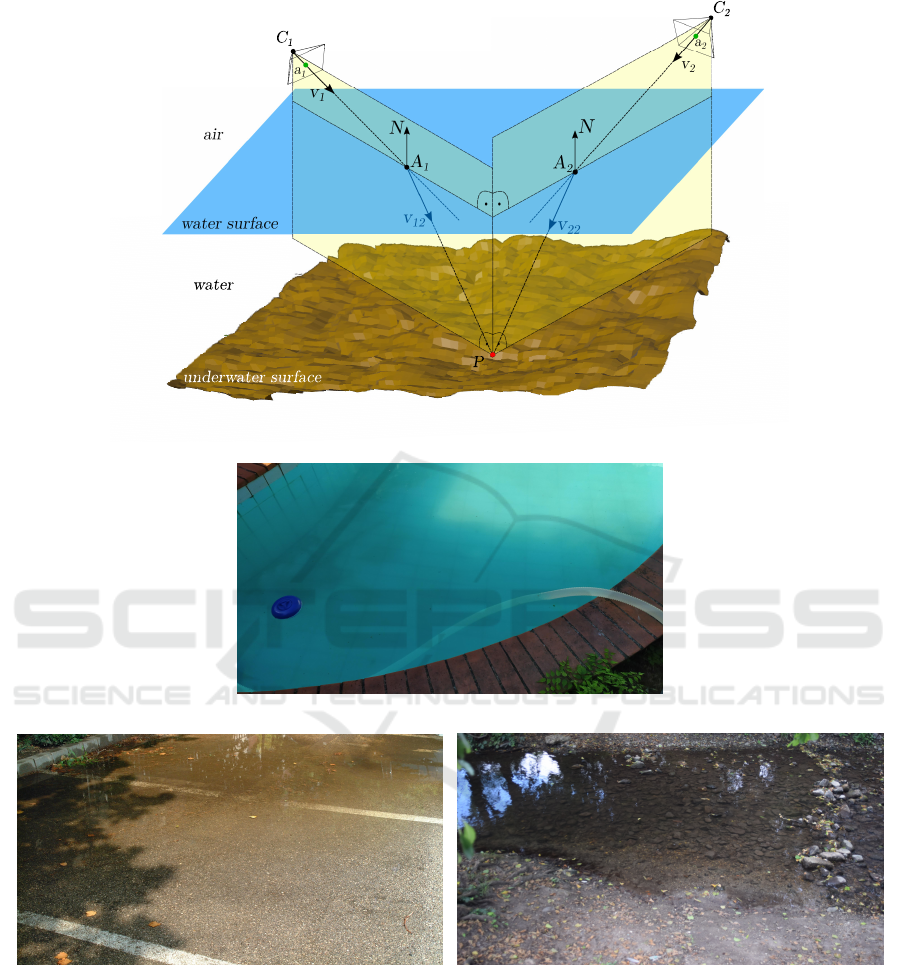
Figure 4: Illustration of underwater depth calculation of a P point seen by two cameras.
(a) Pool
(b) Water hazard (c) Brooklet
Figure 5: Example images used in reconstruction of different test scenes.
goal is to estimate the depth of natural ones. How-
ever, error estimation is more straightforward in the
case of geometric surfaces (artificial reservoirs). Be-
sides, examining the artificial reservoirs allowed us to
investigate the proposed correction in deeper water.
The errors of the proposed pipeline are compara-
ble to the one reported in (Dietrich, 2017). The author
of it also tested in artificial (pool with 0.32 cm mean
absolute error) and natural water reservoirs (5.6 cm
and 3.9 cm mean absolute error - in different time pe-
riods). It should be noted that the authors used georef-
erenced orthophotography (getting a more precise ini-
tial point cloud) and less a general solution to achieve
those results.
Figure 6 shows a qualitative illustration of the pro-
posed method. Using only SfM to reconstruct under-
Water Hazard Depth Estimation for Safe Navigation of Intelligent Vehicles
95
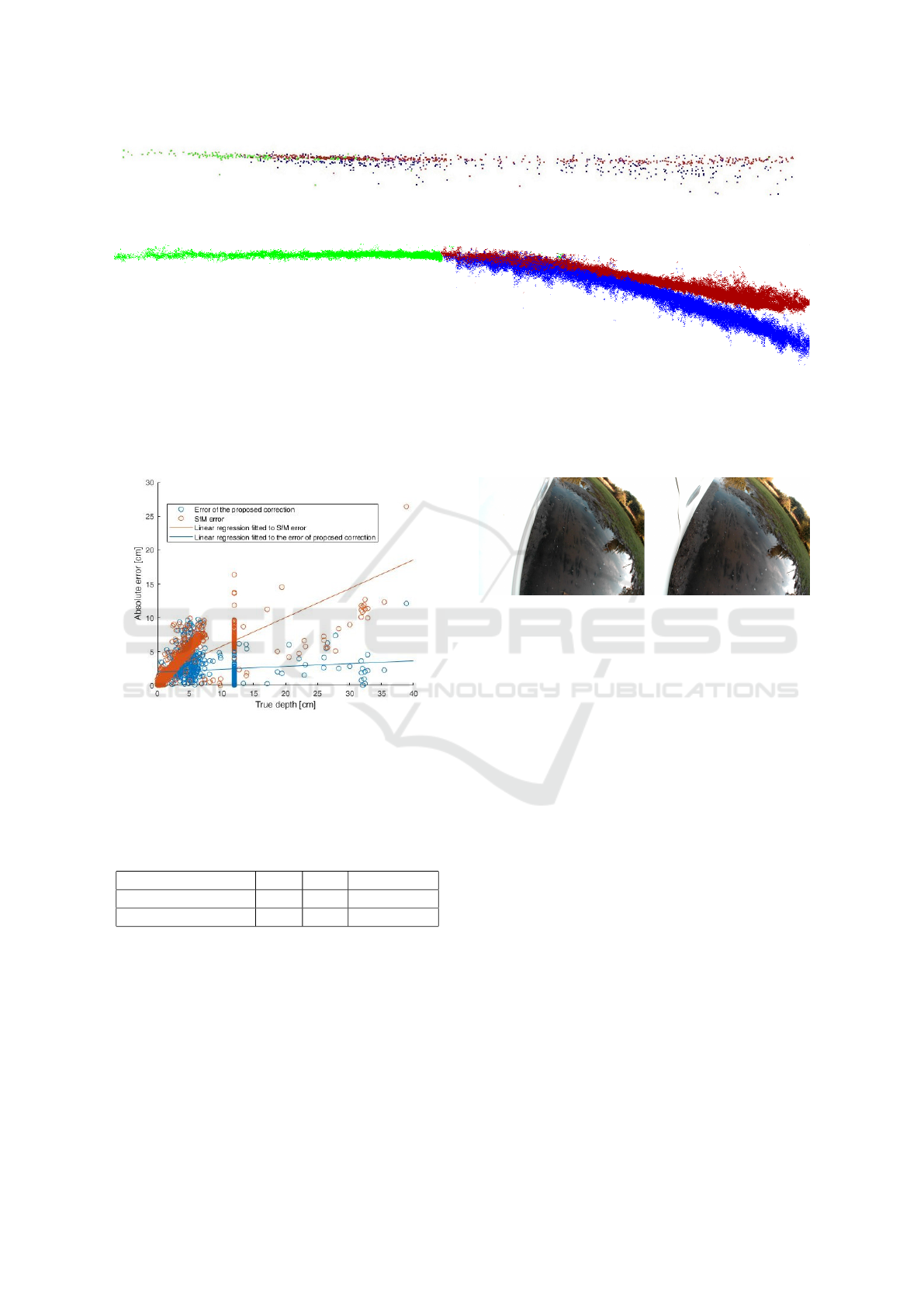
(a) Mono camera
(b) Stereo camera pair
Figure 6: Example point clouds (from different scenes) generated about underwater surface with and without correction.
Green points indicates the ground surface, red ones are the points without the proposed correction and blue ones are the ones
with the correction.
Figure 7: Linear regression to the errors of different ap-
proximation of underwater depth. Note: Vertical line corre-
sponds to artificial reservoir with flat underwater surface.
Table 1: Absolute error in different test scenarios [cm]. SfM
refers to standard Structure from Motion with COLMAP
(Sch
¨
onberger and Frahm, 2016) (Sch
¨
onberger et al., 2016),
[1] refers to (Dietrich, 2017) (on their own scenes) and
’Correction’ refers to our proposed correction method.
Depth calculation SfM [1] Correction
Artificial reservoirs 6.55 0.32 1.55
Natural reservoirs 2.60 3.9 2.26
water points (red points) resulted in an approximately
flat surface at approximately ground (black points)
level. However, with the proposed correction (blue
points), the real underwater surface can be seen. (In-
creasing depth is visible.) A similar phenomenon can
be observed in a point cloud acquired by a stereo cam-
era rig.
In the stereo camera case, as the traversing of the
exact routes was nearly impossible, ground truth data
were not recorded. Instead of that, we will use these
Figure 8: Example image for off-road depth estimation
from our stereo camera dataset.
data to prove our method can be applied in a real-
time driving application. We gathered about half an
hour recording, where about 14 % of the frames con-
tained water hazards. Processing the image pairs of
resolution 1520x1080 requires about 290 ms from
which our depth estimation takes 60 ms in a com-
puter of Intel Core i7-4790K @4.00GHz processor,
32 GB RAM and nVidia GTX 1080 graphic card with
Windows 10 operating system in Matlab environment.
This means that the process can run in this configura-
tion about 4 frame per second. We illustrate (qualita-
tively) our method on the recorded stereo data (Figure
2, 7 and 8) as well.
5 DISCUSSION
In this section we provide some discussion about the
proposed method.
5.1 Implementation Issues
The 4 FPS process speed is already satisfying as depth
estimation is not necessary for every frames (only de-
tection so that the vehicle can start deceleration from
a sufficient distance).
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
96

Assuming a 1.5 m height and 30 degrees tilted
camera installation (flat ground) at the optical centre
of the camera we will get a 60 degree incidence an-
gle. This means about 2.6 m distance on the ground
to the water hazard. Considering the process speed
(and constant velocity) the vehicle must slow down to
9 m/s ( 32 km/h) before reaching this distance. As
the hazards can be detected a lot more farther this is
not extraordinary in an off-road or (pothole filled) on-
road environment for safe navigation.
Optimized implementation e.g. in C++ environ-
ment can speed up even more the estimation, also de-
creasing the image resolution or number of points to
which underwater depth is estimated also reduces the
execution time to a large extent. (In our experience
SfM provides fewer points by two order of magnitude
than stereo, but they also provide meaningful depth
result.)
5.2 Significance of Depth Correction
In the stereo camera case, as the cameras are very
close to each other (we used Omnivision OV4689
CMOS sensor with about 5.8 cm baseline in our case)
and the water surface is relatively far (at least 1 m,
based on camera installation on the vehicle), the inci-
dence angle is approximately the same. So, the one
viewpoint model is a good approximation (in general
SfM case, there can be very different incidence angles
and camera positions).
We can write the equality with the the apparent
depth (D
a
) and the real (D
r
) one:
D
a
· tan θ
1
= D
r
· tan θ
2
(10)
From that, we get:
D
a
= D
r
·
tan(arcsin(
n
1
n
2
sinθ
1
))
tanθ
1
(11)
The resulted
D
a
D
r
ratio is plotted in Figure 9 be-
tween 0 and 90 degrees for
n
1
n
2
= 0.75 (water n
2
= 1.33
and air n
1
= 1.0 refraction indices, considered as con-
stant in this paper). As one can see, at least about 25
% error is produced without any correction (coming
from the value of the initial depth ratio is
n
1
n
2
). How-
ever, 0 degree incidence angle (perpendicular to the
water surface) is not practical in a driving application
(as mentioned before). As the incidence angle goes
to 90 degrees, the refraction angle goes to the critical
angle, and the ratio of apparent and real depth goes
to 0, meaning that we can estimate 0 depth (ground
level) no matter how deep in reality the hazard is (in
theory, in practice the maximum of θ
1
is about 60 de-
grees, as we said earlier). That is why the correction
of the paper is very important.
Figure 9: Ratio of apparent and real depth.
5.3 Comparison
There are papers referred in our work (Section 2 §5)
which deal with underwater depth correction for com-
pletely different purpose and circumstances. We com-
pared our method to one of them in Table 1. However,
it is very important to note:
The depth correction problem of our scenes (images
from general viewpoints) cannot be solved by the
methods referred in this paper in Section 2 (or any
other previous depth correction method to the best of
our knowledge).
Also, as our depth correction problem is the general
solution of those papers simplifications’ (we estimate
parameters assumed to be known by others). That is
why, there is no point in further comparison to the
scene of earlier works. As knowing the parameters
they need for their calculation, we would get the same
simplified equations they use (instead of the ones we
apply), and so the same results as they.
5.4 Other Application Areas
We designed our method to apply it in case of au-
tomation of ground vehicles in an off-road or on-road
(with potholes) environment. However, other vehi-
cles, intelligent systems can profit from the proposed
method as well. For example, UAV exploration of the
terrain also can utilize our underwater surface estima-
tion. For bathymetric mapping purposes or search and
rescue missions in case of a flood. (In the latter case,
the water level should be known to assess the degree
of risk and choose the right vehicle for the rescue.)
(Gomez and Purdie, 2016)
Water Hazard Depth Estimation for Safe Navigation of Intelligent Vehicles
97

6 CONCLUSIONS
In this paper, we presented a novel approach to re-
construct an underwater surface with a mono cam-
era. The method does not require any restriction of
the camera motion or specific sensors, and the 3D co-
ordinates of underwater surface points can be deter-
mined in a least-square sense. The method is useful
to increase vehicles’ intelligence with water hazard
depth estimation both in on-road and off-road cases.
This phenomenon was illustrated in real-life scenar-
ios with onboard stereo cameras.
The method will be more elaborated for practical so-
lutions, as we would like to investigate how other ve-
hicles, transportation system can benefit from our pro-
posed method, and what is the optimal optical struc-
ture for the different vehicles.
ACKNOWLEDGEMENTS
The research presented in this paper, carried out by
Institute for Computer Science and Control was sup-
ported by the Ministry for Innovation and Technology
and the National Research, Development and Innova-
tion Office within the framework of the National Lab
for Autonomous Systems.
REFERENCES
Agrafiotis, P., Karantzalos, K., Georgopoulos, A., and Skar-
latos, D. (2020). Correcting image refraction: To-
wards accurate aerial image-based bathymetry map-
ping in shallow waters. Remote Sensing, 12(2).
Agrafiotis, P., Skarlatos, D., Georgopoulos, A., and
Karantzalos, K. (2019). Shallow water bathymetry
mapping from uav imagery based on machine learn-
ing. ISPRS - International Archives of the Photogram-
metry, Remote Sensing and Spatial Information Sci-
ences, XLII-2/W10:9–16.
Agrawal, A., Ramalingam, S., Taguchi, Y., and Chari, V.
(2012). A theory of multi-layer flat refractive geom-
etry. In 2012 IEEE Conference on Computer Vision
and Pattern Recognition, pages 3346–3353.
Chari, V. and Sturm, P. (2009). Multi-view geometry of the
refractive plane.
Chen, L., Yang, J., and Kong, H. (2017). Lidar-histogram
for fast road and obstacle detection. In 2017 IEEE
International Conference on Robotics and Automation
(ICRA), pages 1343–1348.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sep-
arable convolution for semantic image segmentation.
In Proceedings of the European Conference on Com-
puter Vision (ECCV).
Costa, B., Battista, T., and Pittman, S. (2009). Com-
parative evaluation of airborne lidar and ship-based
multibeam sonar bathymetry and intensity for map-
ping coral reef ecosystems. Remote Sensing of Envi-
ronment, 113(5):1082 – 1100.
Dietrich, J. T. (2017). Bathymetric structure-from-motion:
extracting shallow stream bathymetry from multi-
view stereo photogrammetry. Earth Surface Processes
and Landforms, 42(2):355–364.
Fryer, J. (1983). Photogrammetry through shallow water.
Australian journal of geodesy, photogrammetry, and
surveying, 38:25–38.
Fryer, J. G. and Kniest, H. T. (1985). Errors in depth
determination caused by waves in through-water
photogrammetry. The Photogrammetric Record,
11(66):745–753.
Gomez, C. and Purdie, H. (2016). UAV- based photogram-
metry and geocomputing for hazards and disaster risk
monitoring – a review. Geoenvironmental Disasters,
3.
Han, X., Nguyen, C., You, S., and Lu, J. (2018). Single
image water hazard detection using FCN with reflec-
tion attention units. In Proceedings of the European
Conference on Computer Vision (ECCV).
Haris, M. and Hou, J. (2020). Obstacle detection and safely
navigate the autonomous vehicle from unexpected ob-
stacles on the driving lane. Sensors, 20:4719.
Heikkila, J. and Silven, O. (1997). A four-step camera cal-
ibration procedure with implicit image correction. In
Proceedings of IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, pages
1106–1112.
Hirschmuller, H. (2005). Accurate and efficient stereo pro-
cessing by semi-global matching and mutual informa-
tion. In 2005 IEEE Computer Society Conference on
Computer Vision and Pattern Recognition (CVPR’05),
volume 2, pages 807–814 vol. 2.
Jordt-Sedlazeck, A. and Koch, R. (2013). Refractive
structure-from-motion on underwater images. In 2013
IEEE International Conference on Computer Vision,
pages 57–64.
Kang, L., Wu, L., and Yang, Y.-H. (2012). Two-view un-
derwater structure and motion for cameras under flat
refractive interfaces. In Fitzgibbon, A., Lazebnik, S.,
Perona, P., Sato, Y., and Schmid, C., editors, Com-
puter Vision – ECCV 2012, pages 303–316, Berlin,
Heidelberg. Springer Berlin Heidelberg.
Maas, H.-G. (2015). On the accuracy potential in under-
water/multimedia photogrammetry. Sensors (Basel,
Switzerland), 15:18140–52.
Mettes, P., Tan, R. T., and Veltkamp, R. C. (2017). Water de-
tection through spatio-temporal invariant descriptors.
Computer Vision and Image Understanding, 154:182
– 191.
Murai, S., Kuo, M.-Y. J., Kawahara, R., Nobuhara, S., and
Nishino, K. (2019). Surface normals and shape from
water. In Proceedings of the IEEE/CVF International
Conference on Computer Vision (ICCV).
Mustaniemi, J., Kannala, J., S
¨
arkk
¨
a, S., Matas, J., and
Heikkil
¨
a, J. (2017). Inertial-based scale estimation
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
98

for structure from motion on mobile devices. In
2017 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 4394–4401.
Nguyen, C. V., Milford, M., and Mahony, R. (2017). 3D
tracking of water hazards with polarized stereo cam-
eras. In 2017 IEEE International Conference on
Robotics and Automation (ICRA), pages 5251–5257.
Qian, Y., Zheng, Y., Gong, M., and Yang, Y.-H. (2018). Si-
multaneous 3D reconstruction for water surface and
underwater scene. In Proceedings of the European
Conference on Computer Vision (ECCV).
Qiao, J. J., Wu, X., He, J. Y., Li, W., and Peng, Q. (2020).
Swnet: A deep learning based approach for splashed
water detection on road. IEEE Transactions on Intel-
ligent Transportation Systems, pages 1–14.
Rankin, A. and Matthies, L. (2010). Daytime water detec-
tion based on color variation. In 2010 IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems, pages 215–221.
Sch
¨
onberger, J. L. and Frahm, J.-M. (2016). Structure-
from-motion revisited. In Conference on Computer
Vision and Pattern Recognition (CVPR).
Sch
¨
onberger, J. L., Zheng, E., Pollefeys, M., and Frahm, J.-
M. (2016). Pixelwise view selection for unstructured
multi-view stereo. In European Conference on Com-
puter Vision (ECCV).
Shan, J. (1994). Relative orientation for two-media
photogrammetry. The Photogrammetric Record,
14(84):993–999.
Skarlatos, D. and Agrafiotis, P. (2018). A novel iterative
water refraction correction algorithm for use in struc-
ture from motion photogrammetric pipeline. Journal
of Marine Science and Engineering, 6(3).
Song., R., Wetherall., J., Maskell., S., and Ralph., J. F.
(2020). Weather effects on obstacle detection for au-
tonomous car. In Proceedings of the 6th Interna-
tional Conference on Vehicle Technology and Intelli-
gent Transport Systems - Volume 1: VEHITS,, pages
331–341. INSTICC, SciTePress.
Terwisscha van Scheltinga, R. C., Coco, G., Kleinhans,
M. G., and Friedrich, H. (2020). Observations of dune
interactions from dems using through-water structure
from motion. Geomorphology, 359:107126.
Torr, P. H. S. and Zisserman, A. (2000). MLESAC: A new
robust estimator with application to estimating image
geometry. Computer Vision and Image Understand-
ing, 78:138–156.
Xie, B., Pan, H., Xiang, Z., and Liu, J. (2007). Polarization-
based water hazards detection for autonomous off-
road navigation. In 2007 International Conference on
Mechatronics and Automation, pages 1666–1670.
Zhang, Z. (2000). A flexible new technique for camera cal-
ibration. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 22(11):1330–1334.
Zhao, Y., Li, J., Guo, L., Deng, Y., and Raymond, C. (2014).
Water hazard detection for intelligent vehicle based on
vision information. Recent Patents on Computer Sci-
ence, 7.
Water Hazard Depth Estimation for Safe Navigation of Intelligent Vehicles
99
