
Dynamic and Continuous Berth Allocation using Cuckoo Search
Optimization
Sheraz Aslam
a
, Michalis P. Michaelides
b
and Herodotos Herodotou
c
Department of Electrical Engineering, Computer Engineering and Informatics, Cyprus University of Technology, Cyprus
Keywords:
Berth Allocation Problem, Intelligent Sea Transportation, Cuckoo Search Algorithm, Metaheuristic
Optimization, Port Efficiency.
Abstract:
Over the last couple of decades, demand for seaborne containerized trade has increased significantly and
it is expected to continue growing over the coming years. As an important node in the maritime industry,
a maritime container terminal (MCT) should be able to tackle the growing demand for sea trade. Due to
the increased number of ships that can arrive simultaneously at an MCT combined with inefficient berth
allocation procedures, there are often undesirable situations when the ships have to stay in waiting queues
and delay both their berthing and departure. In order to improve port efficiency in terms of reducing the
total handling cost and late departures, this study investigates the dynamic and continuous berth allocation
problem (DC-BAP), where vessels are assigned dynamically as they arrive at their berth locations assuming
a continuous berth layout. First, the DC-BAP is formulated as a mixed-integer linear programming (MILP)
model. Since BAP is an NP-hard problem and cannot be solved by mathematical approaches in a reasonable
time, this study adopts the recently developed metaheuristic cuckoo search algorithm (CSA) to solve the DC-
BAP. For validating the performance of the proposed CSA method, we use a benchmark case study and a
genetic algorithm solution proposed in recent literature as well as compare our results against the optimal
MILP solution. From the simulation results, it becomes evident that the newly proposed algorithm has higher
efficiency over counterparts in terms of optimal berth allocation within reasonable computation time.
1 INTRODUCTION
The shipping industry covers 90% of the world
seaborne trade movements and 74% of the total goods
that are imported or exported in Europe travel with
ships (Aslam et al., 2020). According to Hsu et al.
(2017), 60% of the total sea transport is based on con-
tainers, which is also growing every year by 6.4%. So
the maritime container terminal (MCT) serves as an
important node in the shipping industry to deal with
increasing sea trade. A report presented in Barbosa
et al. (2019) stated that worldwide ports have han-
dled almost 701 million twenty-foot equivalent units
(TEUs) of containers in 2016. At the same time,
the throughput of container ports is also continuously
increasing, and the management of MCTs’ opera-
tions is becoming a challenging task. As a critical
and integral part of the global transportation network,
the MCTs serve the cost-efficient delivery of various
a
https://orcid.org/0000-0003-4305-0908
b
https://orcid.org/0000-0002-0549-704X
c
https://orcid.org/0000-0002-8717-1691
products in different markets. Linear shipping com-
panies use mega-ships in order to carry large contain-
ers up to 20,000 TEUs (De et al., 2020). Since the
MCTs have a huge importance in the maritime indus-
try, there is an exigent need to enhance the operational
efficiency of MCTs by mitigating the total turnaround
service times of vessels and achieving competitive
strategy along with customer satisfaction. Further-
more, port authorities always try to optimize MCT
operations by employing various strategies for the ef-
ficient utilization of all the port resources.
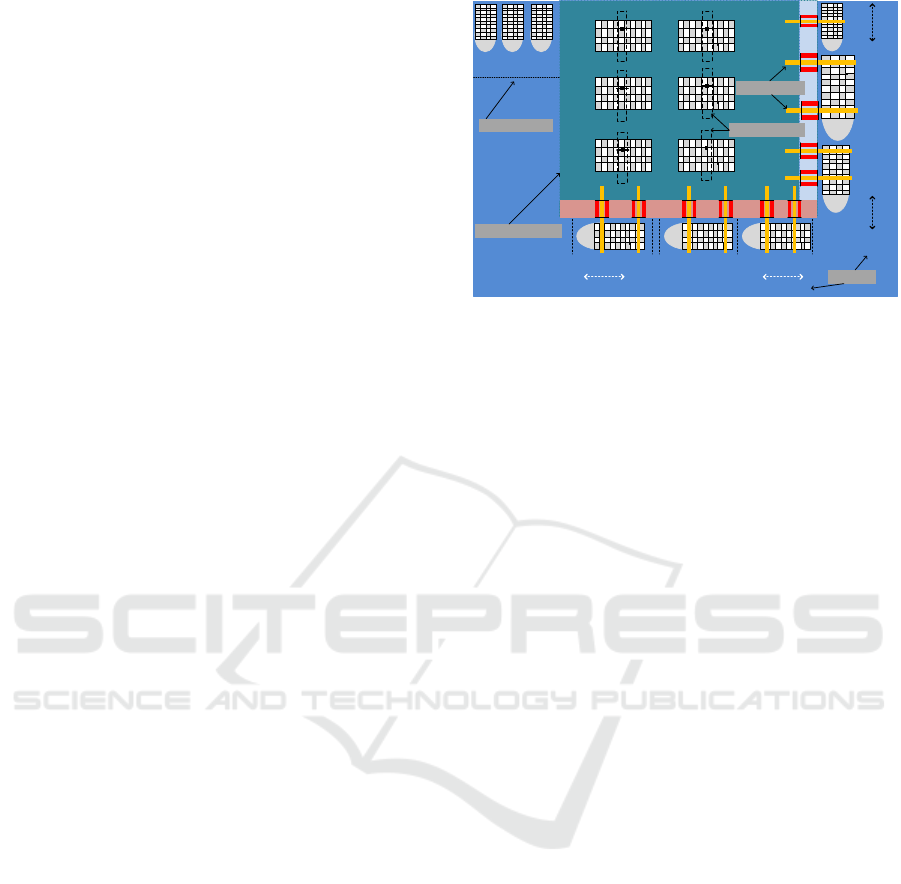
MCT operations can be categorized into three
major operational areas, namely seaside, land-side,
and yard-side operations, as presented in Figure 1.
Among all MCT operations, the seaside operations
are the most important as they affect the overall per-
formance of MCTs. Inefficient planning and im-
proper utilization of port resources may create sev-
eral issues, including congestion, long waiting times,
and late departures. For instance, 13, 647 vessels ar-
rived from Jan-Sep 2019 at Port of Shanghai, China,
from which almost 57% of vessels arrived late (more
72
Aslam, S., Michaelides, M. and Herodotou, H.
Dynamic and Continuous Berth Allocation using Cuckoo Search Optimization.
DOI: 10.5220/0010436600720081
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 72-81
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
than 12 hours) (CargoSmart.ai, 2019). According to
a recent report presented in UNCTAD (2017), aver-
age waiting times for vessels from port-to-berth is 2.2,
2.4, and 2.7 hours in Malaysia, Dubai, and China,
respectively. In Michaelides et al. (2019), the effect
of time in port is considered by investigating the fac-
tors influencing the various waiting times at the Port
of Limassol, Cyprus, both from a quantitative and a
qualitative perspective. For shipping, and particularly
for short sea shipping, there are obvious and imme-
diate benefits from improving efficiency by assisting
all those involved in the port call process to engage
more easily to give shipping companies, port service
providers, and ship agents better information and de-
cision support systems to boost their efficiency and
that of their port (Lind et al., 2019). Hence, MCTs’
operators need to employ suitable strategies and ap-
proaches for proper utilization of the port resources
and to avoid the above-mentioned issues.
These challenges have motivated us to focus on
enhancing seaside operations. Thus, this study deals
with the berth allocation problem (BAP), which is a
well-known problem that aims to assign berthing po-
sitions to arriving vessels at the port in order to min-
imize or maximize the given objective function (e.g.,
minimize total waiting time, reduce late departures,
or maximize terminal performance). Before dealing
with the BAP, it is necessary to understand the prob-
lem environment. Based on the current literature,
there are two major factors affecting the BAP, i.e.,
the configuration of quay/wharf and the arrival time
of ships. Quays can be configured in three differ-
ent ways: 1) continuous berthing layout, where arriv-
ing vessels can be moored at any location along the
wharf; 2) discrete berthing layout, where the wharf is
divided into a fixed number of berths; and 3) hybrid
berthing layout, where we can have a mix of continu-
ous and discrete berthing layouts (Carlo et al., 2015).
In terms of vessel arrivals, there are two main types:
1) static arrivals where all the vessels are assumed to
be at the MCT and 2) dynamic arrivals meaning that
vessels are not at the MCT; however, the expected
time of arrival (ETA) is known for each vessel. This
study adopts the continuous berthing layout together
with dynamic vessel arrivals (i.e., DC-BAP).
Literature Review: Several approaches are reported
in the literature that deal with the BAP (Bierwirth
and Meisel, 2010, 2015). These approaches may pro-
vide exact solutions (Jos et al., 2019) or approxi-
mate (based on heuristic or metaheuristic) solutions
(Kavoosi et al., 2019; Dulebenets, 2017). However,
approximate approaches are more popular over exact
methods due to their efficiency in terms of compu-
tational complexity. The authors of Kavoosi et al.
Continuous berthing layout
Ship 1
Ship 2
Ship 3
Ship
4
Ship
5
Ship
n
Berth 1
Berth 2Berth m
Discrete berthing layout
Marshaling yard
Quay cranes
Gantry cranes
Waiting area
Sea side
Figure 1: An illustration of MCT with multiple berthing
positions assuming discrete and continuous berthing layout.
(2019) present a solution of the BAP by employing
evolutionary algorithms (EAs), particle swarm opti-
mization (PSO) and differential evolution (DE). An
EA-based solution is developed in Dulebenets (2017)
to deal with BAP, while the study presented in Xu
et al. (2018) proposed a simulated annealing (SA) al-
gorithm for the same problem. Jos et al. (2019) de-
veloped a mixed-integer linear programming (MILP)
model to deal with the BAP and a genetic algorithm
(GA) is developed in Hsu et al. (2019) to solve the
BAP. Another study (Chen and Huang, 2017) also de-
velops a GA-based approach to deal with the DC-
BAP to minimize penalty costs for late departures.
Mauri et al. (2016) also deal with the DC-BAP. The
objectives of this study are to minimize the total ser-
vice cost and the total ship stay time at port. To solve
the problem, a variant of neighborhood search method
called adaptive large neighborhood search (ALNS) al-
gorithm is developed. The algorithm works based on
the principle of destroy and recreate, where at each
iteration some solutions are destroyed and new ones
are generated in different ways to find the best solu-
tion according to fitness criteria.
The work presented in Frojan et al. (2015) deals
with an updated form of BAP, where multiple quays
and continuous berth layouts are considered. The
problem is first formulated as an integer linear model
and then solved using GA. To confirm the effec-
tiveness of the proposed method, several simulations
are performed with different sized datasets and the
results show the effectiveness against the compared
approaches. Han et al. (2015) solve the integrated
type of berth allocation where the BAP and the quay
crane (QC) allocation problem are considered simul-
taneously. They proposed a multi-objective particle
swarm optimization (PSO) algorithm, and a continu-
ous berth layout is considered for berth planning. The
primary objectives of this study are twofold: mini-
mizing the range of maximum and minimum QCs to
Dynamic and Continuous Berth Allocation using Cuckoo Search Optimization
73

save resources, and reducing the movements of QCs
to improve terminal’s efficiency. Another study pre-
sented in Cahyono et al. (2019) also addresses the in-
tegrated BAP and QC assignment problem with the
goals of minimizing the total handling and waiting
costs. A model predictive algorithm is developed to
achieve the desired objectives of this study. To vali-
date the proposed approach, several experiments are
conducted on real-time data collected from a con-
tainer terminal in Jakarta, Indonesia. In this study, a
novel cuckoo search algorithm (CSA) is proposed for
the first time (according to the best of our knowledge)
to solve the dynamic and continuous berth allocation
problem (DC-BAP).
Contributions: This study investigates the DC-BAP
and aims to mitigate the total service cost of arriving
vessels, which includes the total handling cost as well
as the waiting times and late departures penalties. We
first formulate DC-BAP as a mixed-integer linear pro-
gramming (MILP) model and solve it using the newly
developed cuckoo search algorithm (CSA). The sim-
ulation results are compared against two benchmarks
proposed in the recent literature: GA and an MILP
exact solution. From the provided simulation results,
it becomes evident that our proposed CSA shows ef-
ficacy over counterparts.
Outline: The remainder of the paper is organized
as follows. Section 2 explains the investigated prob-
lem and provides its mathematical formulation. Our
newly proposed CSA method is described in detail in
Section 3 and simulation settings along with results
are presented in Section 4. Finally, Section 5 dis-
cusses future work and concludes the paper.
2 PROBLEM DESCRIPTION
This section first describes in detail the DC-BAP con-
sidered in this work, followed by a mathematical
formulation as a mixed-integer linear programming
problem. Table 1 lists all abbreviations and notations
used in this section and throughout the paper.
In the dynamic and continuous berth allocation
problem, the MCT has one or more continuous
berthing layouts of known lengths that serve vessels
arriving at different points in time (i.e., in a dynamic
fashion). Let B = {1, 2, . . ., M } denote the set
of all possible berthing positions on the wharf of the
port. Typically, the BAP considers a particular time
period of vessel arrivals, such as the next 48 hours.
Hence, time is modeled as a set of time intervals
T = {1, 2, . . ., K } that can represent some time
duration of interest (e.g., an hour or a 15-minute in-
terval). Finally, let S = {1, 2, . . ., N } denote the set
Table 1: Nomenclature.
Name Explanation
Acronyms
BAP Berth allocation problem
BP Berthing position
CSA Cuckoo search algorithm
DC-BAP Dynamic and continuous BAP
ETA Estimated time of arrival
ETD Estimated time of departure
GA Genetic algorithm
HT Handling time
LoS Length of ship
MCT Maritime container terminal
PBP Preferred berthing position
QCs Quay cranes
WC Waiting cost
WT Waiting time
Notations
BP
s
Berthing position of ship s
BT
s
Berthing time of s
ETA
s
Estimated time of arrival of s
ET D
s
Estimated time of departure of s
HC
s
Handling cost of s per time period
HT
s
Handling time of s
L
s
Length of ship s
LDC
s
Late departure cost of s per time period
LDT
s
Late departure time of s
PBP
s
Preferred berthing position of s
W Length of wharf
WC
s
Waiting cost of s per time period
W T
s
Waiting time of s
Indices
B = {1, 2, ...,M} Set of available berth positions
S = {1, 2,..., N} Set of ships
T = {1, 2, ..., K} Set of time periods
b Berthing position index
s Individual ship index
t Single time period index
of ships arriving at the terminal. For each ship, the es-
timated time of arrival (ETA), the preferred berthing
position (PBP), the ship’s length, and the estimated
(or requested) time of departure (ETD) are known in
advance.
In the ideal scenario, as soon as a vessel arrives at
the MCT, it should be moored at its preferred berthing
position. If the MCT cannot serve the vessel at the
time of arrival, the vessel must be towed to the wait-
ing area of the terminal, as shown in Figure 1. As a
result of the increased number of ships in the wait-
ing area, congestion and navigational challenges are
created at the seaside of the terminal. In this case,
the MCT incurs an extra waiting cost WC
s
against the
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
74

ship s for the duration of s’ waiting time (e.g., calcu-
lated in EURO/hour).
Once the ships are moored at their assigned
berthing position, the quay cranes (QCs) start work-
ing in order to load/unload containers. Container han-
dling resources (e.g., number of QCs, gantry cranes)
are allocated to ships based on the handling rate that
is negotiated between the MCT operator and the ship-
ping company. The handling time for ship s at the
assigned berthing position is calculated based on the
total number of containers loaded on that ship and the
requested handling productivity. Note that this study
adopts a dataset for implementation with precom-
puted handling times for all arriving vessels. How-
ever, the handling productivity is reduced if the vessel
is assigned to a berth position other than its preferred
berthing position (PBP) (Bierwirth and Meisel, 2010,
2015). The PBP typically depends on vessel charac-
teristics such as the vessel length or vessel load as
well as port-related considerations such as the num-
ber of available quay cranes of the berthing area allo-
cated to a particular ship. Hence, the major cause of
handling productivity reduction is the increased load-
ing/unloading and transfer time of containers from the
assigned (suboptimal) berth to storage.
Finally, each ship s specifies its own estimated (or
requested) time of departure ET D
s
and the MCT is
supposed to complete the tasks (loading/unloading) of
s before the ET D
s
, ∀ s ∈ S . Otherwise, the MCT is
liable to pay a late departure penalty cost LDC
s
for the
duration of the delay (e.g., calculated in EURO/hour)
to the shipping companies. Overall, the aim of the
MCT is to minimize the total waiting, handling, and
late departure costs for all arriving vessels at the port.
2.1 Mathematical Formulation
Before disclosing the mathematical formulation of
DC-BAP, we list the assumptions that are considered
in our work.
• The total number of arriving ships at the planning
horizon is known.
• Each berth position is able to handle only one ves-
sel at a particular time.
• A ship takes consecutive time intervals until load-
ing/unloading completion (i.e., no shifting).
• The ETA and ETD for each vessel are known and
will not change.
• Estimated processing time for each vessel is
known or can be easily computed.
• Each ship has a preferred berthing position and it
is known.
• All berths are idle at the start of the time horizon.
• The length of the wharf is known.
The total processing cost of a vessel s that is sched-
uled for berthing at position BP
s
at time BT
s
includes
a waiting cost, a handling cost, and late departure
penalty, expressed by the following function:
Cost(s, BP
s
, BT
s
) = W T
s
·WC
s
+ HT
s
· HC
s
· f (
|
BP
s
− PBP
s
|
)
+ LDT
s
· LDC
s
(1)
The first term in Equation (1), W T
s
·WC
s
, represents
the waiting cost when a vessel has to wait for berthing.
The waiting time W T
s
of vessel s is calculated as
the difference between the berthing time BT
s
and the
planned time of arrival ETA
s
,
W T
s
= BT
s
− ETA
s
, ∀ s ∈ S (2)
The second term in Equation (1) corresponds to the
total handling cost for loading/unloading containers.
The handling time HT
s
depends on the total volume
of containers to be loaded on the vessel, the number
of quay cranes available at this berth, and the aver-
age handling productivity of the cranes. Even though
we consider the handling time as input in this work,
we can easily extend our formulation to compute the
handling time. Without loss of generality, we also in-
troduce the term f (
|
BP
s
− PBP
s
|
), which will penalize
the handling cost based on the absolute difference be-
tween the assigned berthing position BP
s
and the pre-
ferred berthing position PBP
s
. In this work, we assign
a fix penalty when the BP
s
is different than the PBP
s
,
and zero otherwise.
The final term in Equation (1), LDT
s
· LDC
s
, com-
putes the late departure penalty when a vessel departs
after its estimated time of departure. The delayed de-
parture time LDT
s
of vessel s (if any) is calculated as
the difference between the time s completes its oper-
ations and the estimated time of departure ET D
s
.
LDT
s
= max{BT
s
+ HT
s
− ET D
s
, 0}, ∀ s ∈ S (3)
The goal of the dynamic and continuous berth alloca-
tion problem is to find the optimal berthing positions
and times for all vessels such that the total processing
cost is minimized, as shown by the following objec-
tive function:
minimize
∑
s ∈ S
∑
b ∈ B
∑
t ∈ T
x
sbt
· Cost (s, BP
s
, BT
s
) (4)
subject to the following set of constraints:
x
sbt
∈ {0, 1}, ∀ s ∈ S, b ∈ B, t ∈ T (5)
Dynamic and Continuous Berth Allocation using Cuckoo Search Optimization
75

The variable x
sbt
is 1 if vessel s is assigned to berthing
position b at berthing time t, and 0 otherwise.
∑
b ∈ B
∑
t ∈ T
x
sbt
= 1, ∀ s ∈ S, (6)
Constraint (6) ensures that each arrived ship at the
MCT will be assigned at a particular berthing posi-
tion only once during the planning time.
∑
s
0
6=s ∈ S
BP
s
+L
s
∑
b=BP
s
−L
s
0
+1
BT
s
+HT
s
∑
t=BT
s
−HT
s
0
+1
x
s
0
bt
= 0, ∀ s ∈ S,
(7)
Constraint (7) ensures that no two ships can share
(part of) the same berth during the handling times
of the two ships. For instance, suppose a ship s is
planned to be berthed at time 5h, has handling time
equal to 4h, utilizes berthing position 500m, and its
length is 300m. According to constraint (7), no other
ship can use berthing positions from 500m to 800m
(as length of ship s is 300m) in the time interval 5h
to 9h. In addition, a second ship s
0
with length 200m
and handling time 3h cannot use the berthing posi-
tions from 300m to 500m in the time interval 2h to
5h as it would overlap with ship s. Visually, this con-
straint ensures that any two rectangles (denoting the
time intervals and berthing positions allocated to ves-
sels) shown in Figure 3 can never overlap.
ETA
s
≤ BT s, ∀ s ∈ S. (8)
Constraint (8) warrants that the scheduled berthing
time BT
s
of ship s must always be later than or equal
to its planned time of arrival ETA
s
.
BP
s
+ L
s
≤ W, ∀ s ∈ S, (9)
Constraint (9) guarantees that the berthing position
BP
s
of ship s plus its length L
s
will always be less
than or equal to the total length W of the wharf.
3 PROPOSED METHODOLOGY
A metaheuristic-based cuckoo search algorithm
(CSA) was developed to solve the DC-BAP. In the
last decade, CSA has been applied in several do-
mains of computational intelligence and optimization,
where it demonstrated promising efficacy. For in-
stance, CSA is implemented for task scheduling in
cloud computing (Agarwal and Srivastava, 2018), es-
timating solar panel model parameters (Chen and Yu,
2019; Kang et al., 2018), electricity load forecasting
(Dong et al., 2018), optimal placement of actuators
problem (Yang et al., 2018), various scheduling prob-
lems (Tein and Ramli, 2010; Chandrasekaran and Si-
mon, 2012; Aslam et al., 2017a,b), and constrained
optimization problems (Valian et al., 2013).
CSA is a swarm-based metaheuristic optimiza-
tion algorithm that was developed by Yang and Deb
(2009). The CSA emulates the breeding behavior of
some cuckoo species, which have a fascinating repro-
duction mechanism. In particular, some cuckoos lay
their eggs in nests of other birds (often nests of other
species’ nests), where they may discard eggs of other
birds in order to enhance the hatching ratio of their
own eggs. Then, the host birds take care of cuckoo
eggs as they presume that the eggs belong to them.
Nonetheless, sometimes the host birds distinguish be-
tween their own eggs and the alien eggs. Accordingly,
either the discovered alien eggs are thrown out of the
current nest or new nests are built in new locations.
Inspired by this particular mechanism of laying eggs
by the cuckoo birds, the following three standard rules
are adopted to employ CSA for optimization prob-
lems (Yang and Deb, 2009):
1. each cuckoo lays one egg at a time at a randomly
chosen nest;
2. the best nests with high-quality eggs will not be
removed and will be carried over to the next gen-
eration;
3. the quantity of host nests is fixed and the egg
dumped by a cuckoo is discovered by a host bird
with a probability p
α
∈ (0, 1).
In this study, each nest denotes a solution set that
includes the berthing times and berthing positions
for all arriving vessels. An egg represents either a
berthing position or time, while a cuckoo egg rep-
resents a new (and better) berthing position or time.
The total number of host nests reflects the total search
space at each iteration of the algorithm. In this work,
100 host nests are considered and each nest contains
2N eggs, where N is the total number of vessels.
Hence, the total number of eggs in a nest is double the
total number of arriving vessels, as depicted in Figure
2. Overall, the high-level goal of the algorithm is to
use cuckoo eggs (better solutions) to replace not-so-
good eggs in the nests.
Algorithm 1 shows the procedure of the Cuckoo
Search Algorithm, which starts with a randomly dis-
tributed initial population of k=100 host nests over the
search space (line #1). In each iteration of the algo-
rithm, the reproduction step will be performed first,
where new solutions are generated by replacing some
existing eggs with cuckoo eggs in randomly selected
nests (lines #3-8). The replacement follows the ra-
tionale that if a cuckoo egg is very similar to a host
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
76
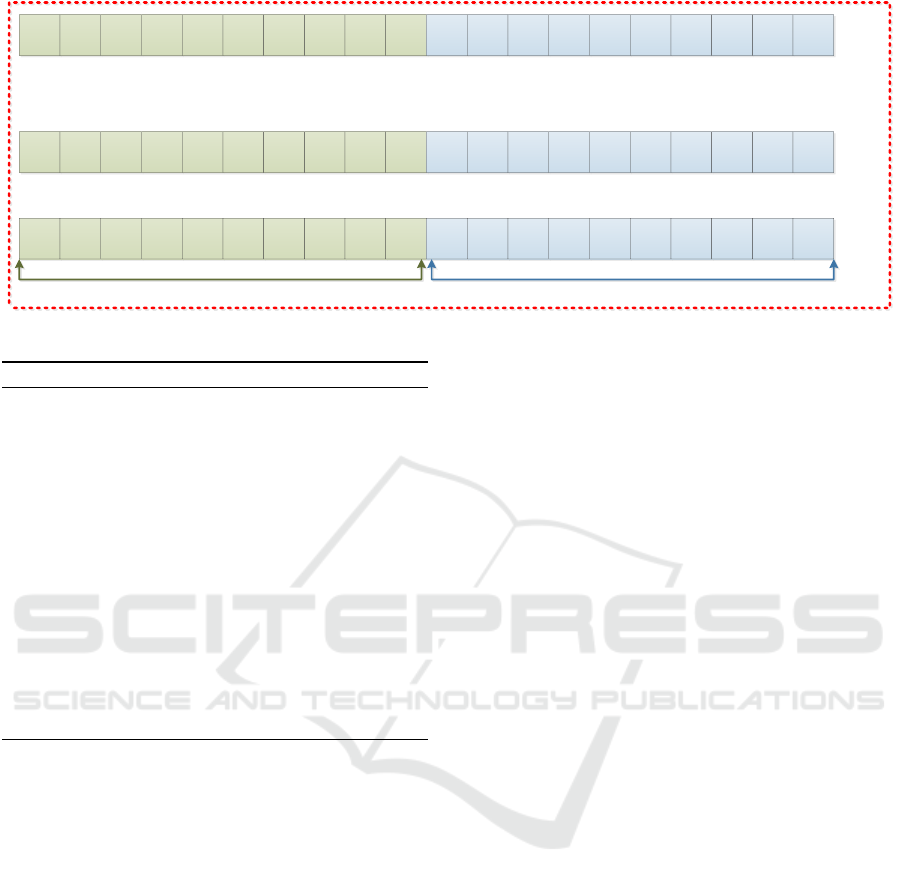
4 5 10 4 13 16 11 6 9 1 776 1425 963 1442 353 1015 443 1018 1040 92
4 6 10 6 13 17 11 6 10 2 776 1422 960 1431 370 1021 437 1010 1051 104
4 10 10 6 14 16 11 7 9 2 770 1416 948 1435 357 1022 436 999 1037 96
Nest i
Nest i+1
Nest k
. . .
Prospective generated berthing times for 10 vessels
Prospective generated berthing positions for 10 vessels
Figure 2: Example solution sets (nests) generated by cuckoo search.
Algorithm 1: Cuckoo Search Algorithm for DC-BAP.
1: X[1..k] = Generate initial population of host nests
2: for t = 1 to max number of iterations do
3: for i = 1 to k do
4: x
new
= X [i] + α ⊕ Levy(λ)
5: if (fitness(x
new
) < fitness(X [i])) then
6: X[i] = x
new
7: end if
8: end for
9: for i = 1 to k do
10: if (rand(0, 1) < p
a
) then
11: X[i] = Generate new host nest
12: end if
13: end for
14: x
best
= Find nest with lowest fitness value in X
15: end for
egg, then this egg has lesser chances to be discovered.
Therefore, a random walk is performed through L
´
evy
flights in order to generate new nests (i.e., new solu-
tions).
X
(t+1)
i
= X
(t)
i
+ α ⊕ Levy(λ), (10)
where t denotes the current iteration number, X
i
the
solution for nest i, and α (α > 0) the step size. The ⊕
operation denotes entry-wise multiplication. A ran-
dom walk in L
´
evy flights is performed from a L
´
evy
distribution with a scale parameter λ (Sanajaoba and
Fernandez, 2016). The primary objective of perform-
ing random steps is to increase the possibility of find-
ing the global solution instead of becoming stuck in
a local optimum. A new solution replaces a current
solution if its fitness score is lower than the fitness
score of the current solution. Note that the fitness of
a possible solution is evaluated based on the objec-
tive function of the DC-BAP presented in Equation
(4) and accounts for the total processing cost (i.e., a
combination of handling, waiting, and late departure
penalty costs). Furthermore, some cuckoo eggs may
be discovered by host birds. These bad nests will be
abandoned and new ones are built so as to enhance
the exploration of the search space (lines #9-13). The
discovering probability p
α
in our work is set to 0.45
as reported in Yang and Deb (2009). Finally, we keep
track of the best solution (line #14). The above steps
repeat until either the total number of iterations is
reached (which equals 100 in this work) or there has
been no fitness improvement for some iterations.
4 EXPERIMENTAL RESULTS
This section presents the experimental setup, exper-
imental data, and results of the experiments. In ad-
dition to the CSA algorithm, we have implemented
a state-of-the-art approach (i.e., GA) proposed in re-
cent literature (Salhi et al., 2019) as well as the ex-
act MILP approach. For our experiments, the prob-
lem dataset was taken from S¸ahin and Kuvvetli (2016)
and contains ten arriving vessels in a day along with
the estimated time of arrival, handling time, estimated
time of departure, preferred berthing position, and
length for each arriving vessel. The complete dataset
is shown in Table 2. The wharf is continuous with a
length of 2000m. The GA parameters of maximum
generations, population size, crossover rate, and mu-
tation rate are set to 500, 200, 0.5, and 0.4, respec-
tively (Salhi et al., 2019). The implemented algo-
rithms are coded in MATLAB 2019b on a Windows
10 PC with COREi7 processor and 8GB RAM.
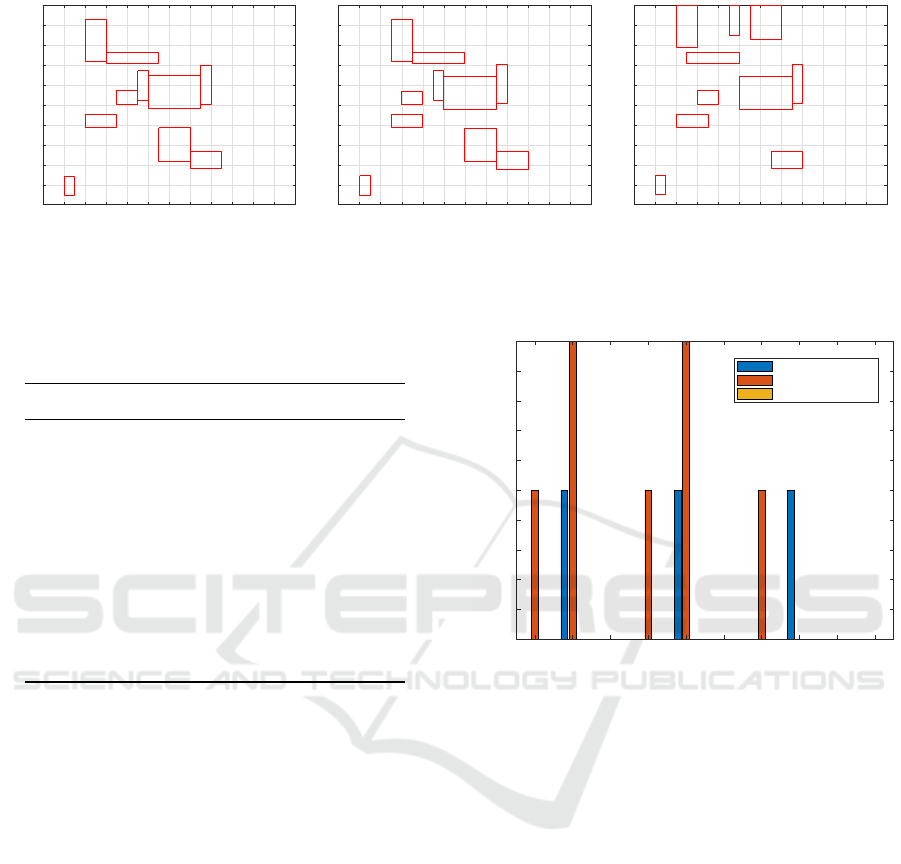
Figure 3 presents the berth allocation solutions
that are generated by the three implemented algo-
rithms, namely, CSA, GA, and MILP. All three ap-
proaches allocate ships over available berthing posi-
tions and time slots based on the primary objective of
this study, which is to minimize total processing cost
as presented in Equation (4). In Figure 3, the vertical
Dynamic and Continuous Berth Allocation using Cuckoo Search Optimization
77
0 2 4 6 8 10 12 14 16 18 20 22 24
Time (hour)
0
200
400
600
800
1000
1200
1400
1600
1800
2000
Wharf length = 2000m
1
2
3
4
5
6
7
8
9
10
(a)
0 2 4 6 8 10 12 14 16 18 20 22 24
Time (hour)
0
200
400
600
800
1000
1200
1400
1600
1800
2000
Wharf length = 2000m
1
2
3
4
5
6
7
8
9
10
(b)
0 2 4 6 8 10 12 14 16 18 20 22 24
Time (hour)
0
200
400
600
800
1000
1200
1400
1600
1800
2000
Wharf length = 2000m
1
2
3
4
5
6
7
8
9
10
(c)
Figure 3: Berth allocation solution generated by (a) CSA, (b) GA, and (c) MILP. Each rectangle denotes the time intervals
and berthing positions allocated to a particular vessel.
Table 2: Dataset used for simulations (S¸ahin and Kuvvetli,
2016).
Ship # ETA HT ETD PBP LoS
1 4 3 8 778 128
2 5 5 11 1416 113
3 10 5 15 957 334
4 4 2 8 1437 423
5 13 3 16 362 173
6 15 1 18 1015 391
7 11 3 15 434 338
8 6 2 9 1008 140
9 9 1 11 1043 302
10 2 1 3 102 194
axis shows the berthing positions, while the horizon-
tal axis presents time divided into hourly time inter-
vals. Each rectangle in this figure denotes the berthing
time periods and berthing positions allocated to an in-
coming vessel. The label within a rectangle shows the
vessel index. For instance, vessel 2, which arrives at
time period 5, is assigned to berthing time period 5
by MILP, time period 6 by CSA, and time period 7
by GA. Hence, with MILP, vessel 2 incurs no waiting
time, while with CSA, it will have to wait for 1 hour
as its preferred berthing position is allocated to vessel
4 (which is optimally assigned). Despite the 1 hour
berthing delay, vessel 2 will still achieve its requested
time of departure. On the other hand, with GA, ves-
sel 2 will have to wait for 2 hours to berth, which in
turn will cause 1 hour delay in its departure. All three
methods assign berthing position 1416, which corre-
sponds to the preferred berthing position of vessel 2.
The waiting time for each vessel for the three
methods is presented in Figure 4. It can be observed
from Figure 4 that no vessel needs to wait for its op-
timal berthing position (PBP) by employing MILP.
However, our newly proposed CSA provides a solu-
1 2 3 4 5 6 7 8 9 10
Ships
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Time (hour)
Waiting time by CSA
Waiting time by GA
Waiting time by MILP
Figure 4: Waiting times when using CSA, GA, and MILP
for each vessel.
tion with a maximum waiting time of one time period
(hour) for any vessel, while with GA the waiting time
for any vessel is up to 2 hours. Furthermore, using
CSA, only three vessels need to wait for their optimal
berth position assignment; on the contrary, using GA,
five vessels need to wait for optimal assignment of
berthing position. From this figure, we can conclude
that the CSA outperforms GA in terms of reducing
waiting time.
Results presented in Figure 5 show the requested
departure times for all arriving vessels and the
planned departures given by the three implemented al-
gorithms, i.e., CSA, GA, and MILP. It can be clearly
seen from this figure that no ship departs late when
MILP is used, while only one vessel (vessel 5) is late
for one hour with CSA. On the contrary, when GA
is employed, two vessels depart late: vessel 2 is late
for one hour and vessel 5 for two hours. Once again,
we conclude that CSA exhibits higher performance in
terms of minimizing late departures compared to GA.
For comparison purposes, Table 3 lists computa-
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
78

1 2 3 4 5 6 7 8 9 10
Ships
0
5
10
15
20
Time (hour)
Solution by CSA
Solution by GA
Solution by MILP
Requested departure time
Figure 5: Requested departure time and planned departure
times when using CSA, GA, and MILP for each vessel.
tional times along with total processing costs in Euro
for all tested methods. Furthermore, we also var-
ied the number of arriving vessels in order to investi-
gate the scalability of the proposed method. We have
tested the three methods on three datasets, where 10,
20, and 30 ships are considered, while all other pa-
rameters are the same, i.e., length of wharf, the vessel
arrival pattern, and berthing layout. It can be seen
from Table 3 that MILP gives the optimal solution in
terms of minimum processing cost in all cases. For
example, results from the 10 vessels show that MILP,
as expected, achieves the lowest cost with 275 Euro,
followed closely by CSA with 285 Euro, and GA with
a significantly higher cost of 310 Euro. A similar
pattern is observed for the 20- and 30-vessel scenar-
ios; the solutions proposed by CSA are only slightly
costlier (3-5%) than the optimal MILP solution, while
the GA solution is much costlier (8-16%).
Table 3: Comparative analysis.
Method Total Cost (Euro) Comp. Time (sec)
# ships: 10 20 30 10 20 30
CSA 285 580 750 0.09 0.87 1.83
GA 310 635 785 0.08 0.55 1.05
MILP 275 550 725 28.35 47.22 85.02
In terms of computation times, CSA and GA ex-
hibit very similar behaviors, both in terms of ab-
solute numbers and scalability. Specifically, both
approaches are extremely efficient with sub-second
times for the 10- and 20-vessel cases, and take less
than 2 seconds for the 3-vessel case. However, the
computation times for MILP are about two orders of
magnitude higher compared to CSA and GA. While
it only takes 1.83 seconds for CSA to find a near-
optimal solution for the 30-vessel case, it takes 85
seconds for MILP to find the optimal solution, which
is only 3% cheaper than the CSA solution. It is im-
portant to note that the above problem sizes are fairly
small. For larger, more realistic problem sizes, MILP
cannot be used as it has been reported to take over
100 hours of CPU time for real-world instances (Salhi
et al., 2019). Such times are certainly not accept-
able in the context of MCT operations. From the
above discussion, it can be observed that the CSA
provides near-optimal solutions in affordable compu-
tation times.
5 CONCLUSIONS AND FUTURE
WORK
In this paper, we have focused on the continuous berth
allocation problem with dynamic vessel arrivals. We
have developed a metaheuristic cuckoo search algo-
rithm (CSA) to solve the DC-BAP. Furthermore, two
benchmark schemes, a well-known metaheuristic GA
and an exact approach (MILP), have also been im-
plemented for comparison purposes. A benchmark
dataset is employed from recent literature for the ex-
periments. The results show that our proposed al-
gorithm has higher efficiency over GA in terms of
minimum processing cost for all arriving vessels.
The newly developed CSA outperforms GA by 8.1%,
8.7%, and 4.5% in terms of reduced cost consider-
ing 10, 20, and 30 vessels, respectively. Compared
to MILP, our proposed CSA provides a near-optimal
solution (<5% from the optimal) at a fraction of com-
putation time. Hence, we conclude that our proposed
CSA is an efficient algorithm for near-optimal berth
allocation with minimum computational complexity.
In the future, we plan to examine the perfor-
mance of the proposed CSA method on larger real-
world datasets containing several vessels and span-
ning longer planning time periods (days to weeks).
We also plan to extend the modeling to incorporate
a hybrid berthing layout that includes both discrete
and continuous berthing layouts. Finally, we plan to
investigate the application of the CSA in solving the
berth allocation problem combined with the related
quay crane assignment and scheduling problems.
ACKNOWLEDGEMENTS
This work was supported by the European Re-
gional Development Fund and the Republic of Cyprus
through the Cyprus Research and Innovation Founda-
tion (STEAM Project: INTEGRATED/0916/0063).
Dynamic and Continuous Berth Allocation using Cuckoo Search Optimization
79

REFERENCES
Agarwal, M. and Srivastava, G. M. S. (2018). A cuckoo
search algorithm-based task scheduling in cloud com-
puting. In Advances in Computer and Computational
Sciences, pages 293–299. Springer.
Aslam, S., Bukhsh, R., Khalid, A., Javaid, N., Ullah,
I., Fatima, I., and Hasan, Q. U. (2017a). An effi-
cient home energy management scheme using cuckoo
search. In International Conference on P2P, Parallel,
Grid, Cloud and Internet Computing, pages 167–178.
Springer.
Aslam, S., Iqbal, Z., Javaid, N., Khan, Z. A., Aurangzeb, K.,
and Haider, S. I. (2017b). Towards efficient energy
management of smart buildings exploiting heuristic
optimization with real time and critical peak pricing
schemes. Energies, 10(12):2065.
Aslam, S., Michaelides, M. P., and Herodotou, H. (2020).
Internet of ships: A survey on architectures, emerging
applications, and challenges. IEEE Internet of Things
Journal, 7:9714–9727.
Barbosa, F., Rampazzo, P. C. B., Yamakami, A., and Ca-
manho, A. S. (2019). The use of frontier techniques
to identify efficient solutions for the berth allocation
problem solved with a hybrid evolutionary algorithm.
Computers & Operations Research, 107:43–60.
Bierwirth, C. and Meisel, F. (2010). A survey of berth al-
location and quay crane scheduling problems in con-
tainer terminals. European Journal of Operational Re-
search, 202(3):615–627.
Bierwirth, C. and Meisel, F. (2015). A follow-up survey of
berth allocation and quay crane scheduling problems
in container terminals. European Journal of Opera-
tional Research, 244(3):675–689.
Cahyono, R. T., Flonk, E. J., and Jayawardhana, B. (2019).
Discrete-event systems modeling and the model pre-
dictive allocation algorithm for integrated berth and
quay crane allocation. IEEE Transactions on Intelli-
gent Transportation Systems, 21(3):1321–1331.
CargoSmart.ai (2019). Vessels arrivals at China Ports.
https://www.cargosmart.ai/en/blog/vessels-arrive-at-
top-china-ports-with-shorter-delays-in-2019/.
Carlo, H. J., Vis, I. F., and Roodbergen, K. J. (2015).
Seaside operations in container terminals: literature
overview, trends, and research directions. Flexible
Services and Manufacturing Journal, 27(2-3):224–
262.
Chandrasekaran, K. and Simon, S. P. (2012). Multi-
objective scheduling problem: hybrid approach using
fuzzy assisted cuckoo search algorithm. Swarm and
Evolutionary Computation, 5:1–16.
Chen, L. and Huang, Y. (2017). A dynamic continu-
ous berth allocation method based on genetic algo-
rithm. In 2017 3rd IEEE International Conference on
Control Science and Systems Engineering (ICCSSE),
pages 770–773. IEEE.
Chen, X. and Yu, K. (2019). Hybridizing cuckoo search
algorithm with biogeography-based optimization for
estimating photovoltaic model parameters. Solar En-
ergy, 180:192–206.
De, A., Pratap, S., Kumar, A., and Tiwari, M. (2020). A hy-
brid dynamic berth allocation planning problem with
fuel costs considerations for container terminal port
using chemical reaction optimization approach. An-
nals of Operations Research, 290(1):783–811.
Dong, Y., Zhang, Z., and Hong, W.-C. (2018). A hybrid sea-
sonal mechanism with a chaotic cuckoo search algo-
rithm with a support vector regression model for elec-
tric load forecasting. Energies, 11(4):1009.
Dulebenets, M. A. (2017). Application of evolutionary
computation for berth scheduling at marine container
terminals: Parameter tuning versus parameter control.
IEEE Transactions on Intelligent Transportation Sys-
tems, 19(1):25–37.
Frojan, P., Correcher, J. F., Alvarez-Valdes, R., Koulouris,
G., and Tamarit, J. M. (2015). The continuous
berth allocation problem in a container terminal with
multiple quays. Expert Systems with Applications,
42(21):7356–7366.
Han, X., Gong, X., and Jo, J. (2015). A new continuous
berth allocation and quay crane assignment model in
container terminal. Computers & Industrial Engineer-
ing, 89:15–22.
Hsu, H.-P., Chiang, T.-L., Wang, C.-N., Fu, H.-P., and
Chou, C.-C. (2019). A Hybrid GA with Variable Quay
Crane Assignment for Solving Berth Allocation Prob-
lem and Quay Crane Assignment Problem Simultane-
ously. Sustainability, 11(7):2018–2038.
Hsu, H.-P., Wang, C.-N., Chou, C.-C., Lee, Y., and Wen, Y.-
F. (2017). Modeling and solving the three seaside op-
erational problems using an object-oriented and timed
predicate/transition net. Applied Sciences, 7(3):218.
Jos, B. C., Harimanikandan, M., Rajendran, C., and Ziegler,
H. (2019). Minimum cost berth allocation problem in
maritime logistics: new mixed integer programming
models. S
¯
adhan
¯
a, 44(6):149.
Kang, T., Yao, J., Jin, M., Yang, S., and Duong, T. (2018).
A novel improved cuckoo search algorithm for param-
eter estimation of photovoltaic (pv) models. Energies,
11(5):1060.
Kavoosi, M., Dulebenets, M. A., Abioye, O., Pasha, J.,
Theophilus, O., Wang, H., Kampmann, R., and Mik-
ijeljevi
´
c, M. (2019). Berth scheduling at marine con-
tainer terminals. Maritime Business Review, 5.
Lind, M., Michaelides, M., Ward, R., Herodotou, H., and
Watson, R. (2019). Boosting data-sharing to improve
short sea shipping performance: Evidence from limas-
sol port calls analysis. Technical Report 35, UNCTAD
Transport and Trade Facilitation Newsletter No. 82 -
Second Quarter.
Mauri, G. R., Ribeiro, G. M., Lorena, L. A. N., and Laporte,
G. (2016). An adaptive large neighborhood search for
the discrete and continuous berth allocation problem.
Computers & Operations Research, 70:140–154.
Michaelides, M. P., Herodotou, H., Lind, M., and Watson,
R. T. (2019). Port-2-port communication enhancing
short sea shipping performance: The case study of
cyprus and the eastern mediterranean. Sustainability,
11(7):1912.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
80

S¸ ahin, C. and Kuvvetli, Y. (2016). Differential evolution
based meta-heuristic algorithm for dynamic continu-
ous berth allocation problem. Applied Mathematical
Modelling, 40(23-24):10679–10688.
Salhi, A., Alsoufi, G., and Yang, X. (2019). An evolutionary
approach to a combined mixed integer programming
model of seaside operations as arise in container ports.
Annals of operations research, 272(1-2):69–98.
Sanajaoba, S. and Fernandez, E. (2016). Maiden applica-
tion of cuckoo search algorithm for optimal sizing of
a remote hybrid renewable energy system. Renewable
energy, 96:1–10.
Tein, L. H. and Ramli, R. (2010). Recent advancements
of nurse scheduling models and a potential path. In
Proc. 6th IMT-GT Conference on Mathematics, Statis-
tics and its Applications (ICMSA 2010), pages 395–
409.
UNCTAD (2017). UNCTAD: Ports in 2017.
https://unctad.org/system/files/official-document/rmt
2018ch4 en.pdf.
Valian, E., Tavakoli, S., Mohanna, S., and Haghi, A.
(2013). Improved cuckoo search for reliability op-
timization problems. Computers & Industrial Engi-
neering, 64(1):459–468.
Xu, Y., Xue, K., and Du, Y. (2018). Berth scheduling prob-
lem considering traffic limitations in the navigation
channel. Sustainability, 10(12):4795–4816.
Yang, B., Miao, J., Fan, Z., Long, J., and Liu, X. (2018).
Modified cuckoo search algorithm for the optimal
placement of actuators problem. Applied Soft Com-
puting, 67:48–60.
Yang, X.-S. and Deb, S. (2009). Cuckoo Search via L
´
evy
Flights. In World Congress on Nature & Biologically
Inspired Computing (NaBIC), pages 210–214. IEEE.
Dynamic and Continuous Berth Allocation using Cuckoo Search Optimization
81
