
The Perception Modification Concept to Free the Path of An
Automated Vehicle Remotely
Johannes Feiler and Frank Diermeyer
Institute of Automotive Technology, Technical University of Munich, Boltzmannstr. 15, Garching b., München, Germany
Keywords: Teleoperation, Remote Assistance, Indirect Control, Perception Correction, Object Detection, Manipulation.
Abstract: Inner-city, automated vehicles will face situations in which they leave their operational design domain. That
event may lead to an undesired vehicle standstill. Consequently, the vehicle’s independent continuation to its
desired destination is not feasible. The undesired vehicle standstill can be caused by uncertainties in object
detection, by environmental circumstances like weather, by infrastructural changes or by complex scenarios
in general. Teleoperation is one approach to support the vehicle in such situations. However, it may not be
clear which teleoperation concept is appropriate. In this paper, a teleoperation concept and its implementation
to free the path of an automated vehicle is presented. The situation to be resolved is that a detection hinders
the automated vehicle to proceed. However, the detection is either a false positive or it is an indeterminate
object which can be ignored. The teleoperator corrects the object list and the occupancy grid map. Thereby,
the teleoperator enables the automated vehicle to continue its path. The preliminary tests show that the
teleoperation concept enables teleoperators to resolve the respective scenarios appropriately.
1 INTRODUCTION
The SAE J3016 (J3016, 2018) subdivides the
automation of vehicles into six different levels of
driving automation. The levels range from level 5
‘Full Driving Automation’ to level 0 ‘No Driving
Automation’. In level 5 automation, no driver has to
be present neither for supervision or as a fallback
system. Furthermore, the automation system is not
limited to an operational design domain. In contrast
to level 5, level 4 systems are limited to a specific
operational design domain which can be classified as
environmental, geographical, or time-of-day
restricted (J3016, 2018) among others. Therefore,
level 4 systems are expected to be launched prior to
level 5 systems. Whenever the automation system
leaves its operational design domain, it has to come
to a safe state. A safe state means a standstill for
inner-city vehicles in many cases. As a consequence,
passengers would be stranded. This should be
avoided. Therefore, the motivation is to enable the
automated vehicle (AV) to continue driving.
Teleoperation is a possible solution. The vehicle
will request help from the control center via the
mobile network (Feiler et al., 2020). A teleoperator
connects to the vehicle and resolves the problem. This
technology comes with several challenges.
First, the teleoperator has to be aware of the
situation, that led to the help request. Camera streams
and further vehicle sensor information are visualized
to the teleoperator. Progress was made in improving
video streaming (Gnatzig et al., 2013; Liu et al., 2016;
Kang et al., 2018; Tang et al., 2013) and in increasing
teleoperator immersion (Bout et al., 2017; Georg und
Diermeyer, 2019; Tang Chen, 2014; Hosseini, 2018).
Second, the teleoperator has to resolve the
situation reliably and safely. Different methods of
interacting with the vehicle are possible. This
spectrum ranges from low-level control commands to
high-level teleoperation concepts. A low-level
control concept is the direct control, where the
teleoperator sets the desired velocity, the desired
steering wheel angle and the desired gear. Direct
control was implemented several times in the research
context (Gnatzig et al., 2013; Liu et al., 2016; Ross et
al., 2008). Progress was made in analyzing and
reducing system latency (Ross et al., 2008; Blissing
et al., 2016; Georg et al., 2020) and in designing
teleoperation assistance systems (Hosseini, 2018;
Chucholowski, 2015). However, the teleoperators are
imposed by a high workload (Georg et al., 2018; Liu
et al., 2016). As soon as a teleoperator steers a vehicle
with low-level control commands, the teleoperator is
responsible for avoiding accidents during the
Feiler, J. and Diermeyer, F.
The Perception Modification Concept to Free the Path of An Automated Vehicle Remotely.
DOI: 10.5220/0010433304050412
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 405-412
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
405

vehicle’s motion. Due to the control from a remote
location and system latency, the teleoperator can be
overwhelmed by the imposed mental workload.
Therefore, the motivation is to decrease the
teleoperator’s mental workload. In general, there are
two approaches to reduce the teleoperator’s mental
workload: (1) Improvement of data representation
(better videos and visualizations, head-mounted
display, sensory feedback) and (2) Simplification of
control tasks. Because several improvements
regarding (1) have already been made, this article
addresses simplification of control.
Summarizing the previous paragraphs, the
motivation is that an AV is stranded and that possible
teleoperation solutions place a high workload on
teleoperators. The objective of this paper is to develop
a teleoperation concept that enables the AV to
proceed and that places a lower workload on
teleoperators than direct control. Section 2 gives an
overview of high-level teleoperation concepts, their
application and related architectural considerations.
Section 3 states the identified research gap and shows
the requirements to be met by the concept. Section 4
outlines the concept and section 5 its exemplary
implementation. Section 6 lists the conducted tests
and section 7 discusses the concept and its
implementation.
2 RELATED WORK
This section illustrates an overview of high-level
teleoperation concepts for road vehicles, the state of
the art with respect to a related perception
modification implementation, the common present
AV architecture, and some of its challenges.
2.1 High-level Teleoperation Concepts
for Road Vehicles
High-level teleoperation concepts are control
concepts that transfer abstract control actions or
signals to the vehicle, other than direct control
signals. In other publications, they are called indirect
control concepts (Gnatzig et al., 2013; Tikanmäki et
al., 2017).
An example of a high-level teleoperation concept
is the trajectory-control of Gnatzig et al. (2015, S. 53).
The control signal is in the format of trajectories.
Therefore, the control interface is on the level of
guidance in accordance to Donges (1982). The
teleoperator sets trajectories and supervises the
vehicle’s motion. Study results showed that the
teleoperators steered the vehicle more stable than
with direct control under a video streaming latency of
600 milliseconds. However, the teleoperators’
workload was not measured. Furthermore, the
trajectory control concept made only use of the
vehicle’s control algorithms, but not of its perception
or planning capabilities. Therefore, it is suggested,
that the teleoperator’s workload might still be
increased.
A similar teleoperation concept was patented by
Biehler et al. (2017). Biehler suggests, that a
teleoperator proposes actions in form of paths or
trajectories. The trajectory is transmitted to the
vehicle and the vehicle follows it under supervision
or autonomously. However, it is questionable, why
should the vehicle be able to proceed driving
autonomously after the teleoperator’s actions, when it
could not do the task autonomously just a moment
ago. Trajectory planners usually scan the complete
free space for a drivable path. If no drivable path is
found by the algorithm but a drivable path exists, the
problem probably lies in perception, not planning.
Therefore, the concept of teleoperator-provided
actions and onboard responsibility is questionable.
A high-level teleoperation concept could be that
the teleoperator confirms, modifies or rejects
behavior suggestions of the vehicle. Similar ideas to
safely control an AV remotely are patented. It is
worth mentioning, teleoperator confirmations,
modifications or rejections for the AV behavior
suggestions (Fairfield et al., 2019; Lockwood et al.,
2019), or the marking of non-passable corridors
(Levinson et al., 2017). However, no references to
implementations or evaluations could be found.
Therefore, ideas and concepts for high-level
teleoperation concepts already exists. They have the
potential to enable an AV to proceed and to keep the
teleoperator’s workload low. However, no
implementation or evaluation of workload can be
found. Nevertheless, it is assumed, that high-level
teleoperation concepts have the potential to decrease
teleoperators’ workload due to simplification of
control tasks. In order to be able to make statements
regarding the feasibility and the workload of high-
level teleoperation concepts, they have to be
implemented, compared and evaluated.
2.2 Object Connotation Modification in
Shared Autonomy
Pitzer et al. designed and tested a shared autonomy
concept between a handling robot and a human
operator (Pitzer et al., 2011). The robot’s task is to
pick and relocate selected objects. The human
operator can support the robot’s perception, if the
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
406

robot cannot find a certain object. The operator
selects the desired object on a monitor and the robot
then uses this information to pick the specified object
without further user help. Pitzer et al. pursued a
similar concept as in this paper, where the robot’s
perception is assisted, the context and the
implementation however differ significantly.
An Uber Technologies patent (Kroop et al., 2019)
considers a similar idea as developed to the one in this
paper. The patent states, that the self-driving vehicle
identifies indeterminate objects, sends the encoded
sensor data to a back-end and receives the required
information in order to resolve the actual situation.
However, no publication containing an
implementation can be found. Furthermore, little
information about technical challenges is elaborated.
For example, perception is commonly represented in
different ways. However, the handling of other
representations than objects is not covered.
2.3 Software Architecture of
Automated Vehicles
Perception modification requires an interface to the
perception output. This interface has to be provided
by the automation architecture. For example, the
sense-plan-act architecture allows such an interface.
The end-to-end architecture generally not. Common
architectures are introduced to be aware of the correct
context.
Currently, two approaches are widely used to
define the software architecture for automated
driving. First, end-to-end automation (Xu et al., 2016;
Xiao et al., 2019; Bojarski et al., 2016; Pan et al.,
2017; Zhang, 2019) and second, modular sense-plan-
act architecture (Pendleton et al., 2017). Given the
higher number of publications, modular sense-plan-
act architecture is more common in research than end-
to-end automation. Sense-plan-act architecture is
divided into submodules and each of these is
currently a research topic by itself. One of the
challenging parts is the perception module. The goal
of perception is to provide the contextual
representation of the vehicle’s surroundings. This is
usually done by locating relevant objects and
understanding their semantic meaning. It must also be
mentioned, that there is already an ETSI norm on
Collective Perception Service that standardizes
perception messages for V2X-communication (ETSI
TR 103 562, 2019).
2.4 Preventing False Negatives Leads
to False Positives
False positives remain a challenge to perception, even
if there are algorithms that reduce their occurrence.
For example, Gies et al. (2018) track and fuse objects
of different detection algorithms while considering
constraints such as physical, module and digital map
constraints in order to reduce false positives and
uncertain states. Furthermore, Durand et al. (2019)
introduced a confidence score using the number of
sensors covering a detection, the detection’s lifetime
and the respective sensor failure history. Moreover,
Kamann et al. (2018) developed a model to calculate
radar wave propagation in order to remove reflections
from the raw sensor output that would lead to false-
positive detections. The mentioned algorithms as well
as many others reduce the number of false positives
(Jo et al., 2017; Bauer et al., 2019; Mita et al., 2019).
However, some false positive detections persist (Jo et
al., 2017; Bauer et al., 2019).
In general, one premise for AV is that relevant
objects must not be overlooked. An overlooked object
is called a false negative. However, preventing the
occurrence of false negatives comes with the rise of
the occurrence of false positives detections without
corresponding real objects. At the moment, the
dilemma in object detection is that the number of false
negatives and false positives cannot be minimized
simultaneously. The reason is that a confidence score
threshold has to be set, that results in the following
trade-off: the lower the threshold is, the fewer objects
are overlooked. But this also means, that more false
positives can occur. On the other hand, the higher the
threshold is, the fewer false positives occur, but the
higher the number of overlooked objects is. Since
overlooked objects might lead to a crash, false
negatives are unacceptable for an AV.
Therefore, false positive detections will occur in
the future. False positive detections can hinder the
AV from reaching its destination.
2.5 Indeterminate Objects
Indeterminate objects are detections that are
insufficiently interpreted or incorrectly classified by
the detection algorithm. Such objects might not be
familiar to the detection algorithm when the AV is
launched. Reasons for that could be missing labeled
data during the training process of the detection
algorithm or the vehicle operation in an unforeseen
domain. Therefore, the detection algorithm interprets
such detections inappropriately. Examples could be
some kind of debris, lost cargo, packaging, branchlets
The Perception Modification Concept to Free the Path of An Automated Vehicle Remotely
407
or steaming gully covers. Furthermore,
misinterpreted lane markings or road signs might be
an issue. Some of those detections would not hinder a
human’s drive. Therefore, the AV could proceed.
3 OBJECTIVE AND
REQUIREMENTS
The following research gap has been identified from
the related work. It is not researched yet, if a
teleoperator can correct the AV perception so that the
AV can continue to drive. It is suggested that such a
teleoperation concept places less workload on
teleoperators than direct control. Therefore, the aim
of this article is to present the feasibility and the
implementation of a high-level teleoperation concept
that enables the teleoperator to correct the AV
perception. The high-level teleoperation concept
should meet the following requirements.
First, it has to solve a specific scenario: The AV
trajectory planner does not find a drivable path due to
a mistaken obstructive detection. The mistaken
obstructive detection can be a false positive or an
indeterminate object as mentioned in sections 2.4 and
2.5.
The second requirement is that the teleoperator
should only intervene minimally in the system. The
underlying assumption is, that the workload is low if
the teleoperator has to do little.
The third requirement is that its usage has to be
safe. The teleoperator has to be able to distinguish
between scenarios in which the concept can be
applied and in which not. Moreover, the teleoperator
has to comprehend the consequences of the
perception correction. Finally, the teleoperator has to
be able to withdraw the perception correction if
something unexpected happens.
4 THE PROPOSED CONCEPT
In consideration of the mentioned requirements, a
concept is proposed that enables the teleoperator to
mark areas as drivable. Therefore, the AV is able to
continue the drive.
4.1 Integration into an Automated
Vehicle System Architecture
The goal of the presented method is to support the AV
in situations where the vehicle’s trajectory planner
cannot find a feasible trajectory due to a mistaken
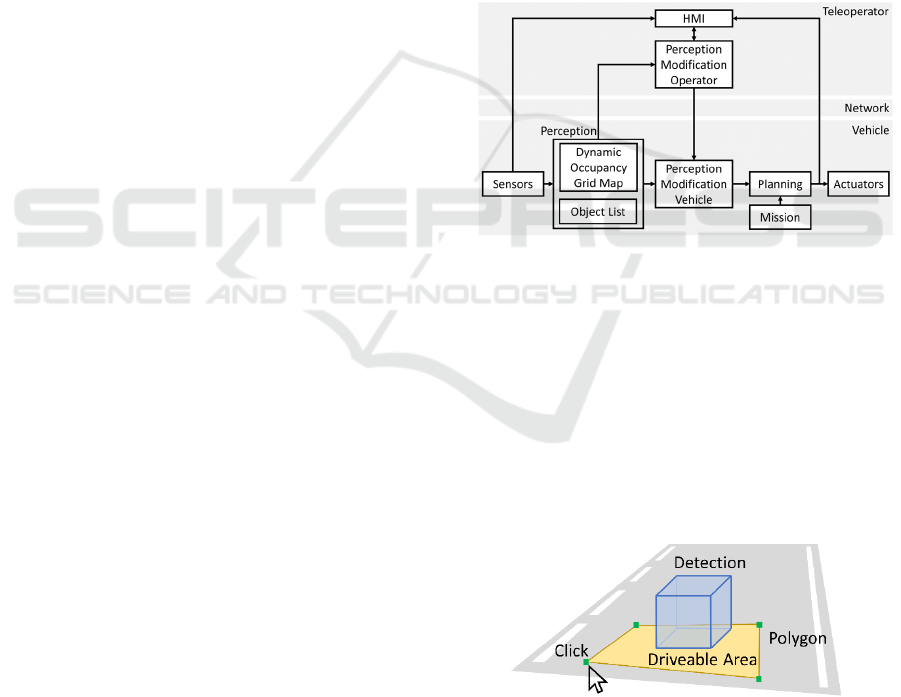
obstructing detection. The automation architecture at
hand is the sense-plan-act architecture as depicted at
the bottom of Figure 1. The interface is placed
between the output of the perception module and the
input to the planning module. The module is called
perception modification as visualized in Figure 1.
At the vehicle, data routing in the sense-plan-act
architecture is changed. Under normal vehicle
operation, the output of perception is the direct input
for planning. In perception modification mode
however, the perception modification vehicle module
is placed between the perception and planning
module. Consequently, the input to the planning
module is the possibly modified output from the
perception modification module. The perception is as
commonly used represented by a dynamic occupancy
grid map and an object list (Pendleton et al., 2017;
Gies et al., 2018).
Figure 1: Architecture of the perception modification
concept.
4.2 The Perception Modification
Module
The teleoperator interacts with a human-machine-
interface (HMI). The HMI has two essential
functions: First, it provides the teleoperator with the
required information about the current situation.
Second, it accepts the teleoperator’s input in regard to
the drivable area. Figure 2 depicts these functions.
Figure 2: Schematic depiction of the teleoperator’s HMI.
Detections are illustrated as 3D objects with their actual
dimensions. The driveable area can be marked.
The required information about the current situation
is:
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
408
Video streams
Objects
Dynamic occupancy grid map
Mission or desired behavior
Current trajectory
The perception modification module must have at
least these functions:
Take the drivable area as an input
Recognize detections within that area
Tag those detections as ‘ignored’
The teleoperator is responsible for supervision of
the marked area. As soon as the marked area is not
drivable anymore, the teleoperator has to withdraw
the marked area. In order to have enough time to do
so, the maximum speed of the AV should be restricted
while driving based on the modified perception data.
The consequences of the perception modification
have to be comprehended by the teleoperator.
Therefore, two modes within the perception
modification are proposed: Planning mode and
Driving mode. In planning mode, the consequences
of the perception correction are only visualized, but
not performed. This includes the affected detections
and the planned vehicle’s trajectory. During driving
mode, the vehicle acts according to the modified
perception.
4.3 Shared Responsibility
The teleoperator only has responsibility for the
marked area. Therefore, the remaining area is not
affected by the perception modification and will still
be handled by the vehicle. Furthermore, the plan and
act part of the sense-plan-act architecture is carried
out by the vehicle completely independently. The
teleoperator does not intervene in any modules other
than the perception modification module.
The additional responsibility of the teleoperator is
it to identify situations that are not resolvable with the
perception modification concept. Examples are
objects that must not be ignored or occlusions or blind
spots that hinder the teleoperator’s view.
5 IMPLEMENTATION
The following section describes the experimental
implementation of the perception modification
concept in a simulation environment.
5.1 System Setup
The experimental setup aims to resemble an AV and
its behavior in the situation where a false-positive is
blocking the all possible trajectories of the vehicle. A
simulator is utilized to provide sensor data, ego
vehicle motion and the environment. The author used
the LGSVL simulator for that purpose (Rong et al.,
2020). The considered software modules were
implemented in C++ and made use of the ROS
Melodic framework. Both a grid map representation
as well as an object list were implemented and
presented to demonstrate the compatibility with the
system architecture. The implemented setup based on
the architecture depicted in Figure 1.
5.2 The Algorithms
The HMI module and the perception modification
module are the central modules under consideration
here.
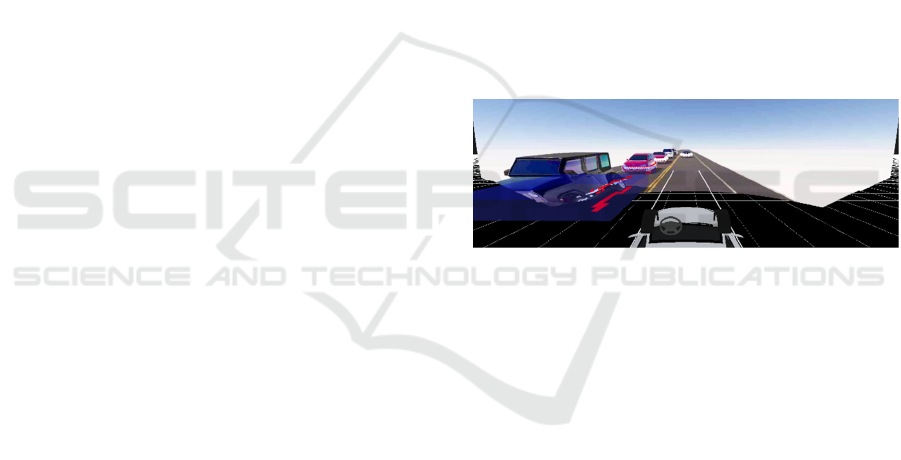
Figure 3 depicts the HMI, that is mainly based on
Georg and Diermeyer (2019). It visualizes the
vehicle’s position on a 3D plane and projects the
camera feeds onto a sphere which moves along with
the vehicle.
Figure 3: The teleoperator’s view in the HMI module.
Detected objects (blue), lidar reflections (red points), the
occupancy grid map (red rectangles) and the current
trajectory (white lines) are visualized as 3D objects.
The HMI was extended. Whenever the
teleoperator clicks within that visualization, the 3D
position of the click is processed by the perception
modification module. Keyboard presses are treated
similarly. With these features, the teleoperator creates
polygons on the floor. These polygons are interpreted
by the perception modification module as the drivable
area. With keyboard presses, the status of the
perception modification module is changed from
‘planning’ to ‘driving’ and back. In planning mode,
the teleoperator creates polygons and sees the
potential effect of those changes to the vehicle
behavior. The vehicle’s new planned path is
visualized. However, the planned path is not
conducted by the vehicle in ‘planning’ mode. First,
the teleoperator has to confirm and switch into
‘driving’ mode. In driving mode, the vehicle drives
along the planned path.
The grid map module at the vehicle side aims to
resemble a dynamic occupancy grid map similar to
The Perception Modification Concept to Free the Path of An Automated Vehicle Remotely
409

published grid maps (Nuss et al., 2016). For the sake
of simplicity, the grid map at hand is constructed
based on the single-layer lidar information and makes
use of the ANYbotics grid map library (Fankhauser
und Hutter, 2016).
The detection module is also based on the
reflections provided by the single-layer lidar sensor.
The module provides 3D objects described with
position, dimension and velocity.
The planning module as depicted in Figure 1 is
kept comparably elementary. A module creates a
straight path based on the current position with a fixed
maximum velocity. A collision detection module
reacts to occupied fields or hindering objects and
reduces the absolute velocity of the velocity profile of
the straight path. Therefore, the vehicle reacts to
hindering objects with a standstill.
5.3 Simulating Non-existing Hindering
Objects
The grid map module and the object detection module
are extended to create synthetic false positives. This
feature reproduces the situations described in
subsection 3.3. In the case of a false positive detection
in the object list, an object without a real physical
representation in form of lidar reflections can be
created. Figure 4 shows such a false positive detection
in front of the ego vehicle. Similarly, synthetic false
positives can be created in the grid map.
Figure 4: False positive detected object (red) in front of the
ego vehicle enclosed by a clicked polygon (green points,
orange area).
6 RESULTS
The following tests were conducted in order to show
the feasibility of the perception modification concept
and to draw conclusions for further improvements
and open questions. The tests cases are:
False positive in the object list and no wrong
detection in the grid map.
False positive in the grid map and no wrong
detection in the object list.
False positive in the grid map and in the object
list.
False positive in grid map 1m in front of a real
object and no wrong detection in object list.
Correct detection
Therefore, the test cases cover the range of
applications of the perception modification concept.
In the scenarios representing an unnecessary stand
still, the perception modification concept enabled the
teleoperator to modify the incorrect perception and
the vehicle to continue driving. Situations regarding a
correct standstill were recognized as such.
7 DISCUSSION
The conducted tests show the feasibility of the
perception modification concept. However, further
considerations are presented to enable
implementation on the real vehicle.
Additional latency to the system setup arises due
to the transmission of the object list and the grid map
representation over the mobile network twice. This is
not considered in the system setup yet. However, its
influence can be estimated. Mean ping times are
estimated to be around 45 to 59 milliseconds
(Neumeier et al., 2019). The additional latency would
be equal or higher than these values. Only the
teleoperator has to compensate this latency during the
supervision task. The vehicle-internal automation
pipeline is not affected by that latency.
Finally, maps are not considered at the moment.
They are usually part of an AV and can provide
mistaken obstructing objects as well. In that case, the
current interface could be extended to be capable of
modifying map data.
8 CONCLUSIONS
A perception modification concept to free the path of
an AV is developed and demonstrated in this paper.
The results of the simulation test cases show that the
teleoperation concept enables teleoperators to resolve
the respective situations appropriately. The situation
addressed is a mistaken hindering detection that
causes a standstill of the AV. The detection is either
a false positive or an indeterminate object which can
be ignored. The teleoperator marks the drivable area
and enables the AV to continue its drive.
It is expected that the teleoperators are therefore
imposed with less workload compared to direct
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
410

teleoperation concepts. This has to be shown in future
studies.
ACKNOWLEDGEMENTS
Johannes Feiler initiated the idea of the paper and
implemented the perception modification concept.
The teleoperation system at hand is a collaborative
achievement of the institute teleoperation team,
which consists of Simon Hoffmann, Andreas
Schimpe, Domagoj Majstorovic and Jean-Michael
Georg. Dr. Frank Diermeyer contributed to the
essential concept of the research project. He revised
the manuscript critically for important intellectual
content and gave final approval of the version to be
published. He agrees with all aspects of the work.
Matthias Vogelmeier contributed with ideas in his
prior master thesis about the object list manipulation
in this work. This research is accomplished within the
“UNICARagil” project. We acknowledge the
financial support for the project by the Federal
Ministry of Education and Research of Germany
(BMBF).
REFERENCES
Bauer, Daniel; Kuhnert, Lars; Eckstein, Lutz (2019): Deep,
spatially coherent Inverse Sensor Models with
Uncertainty Incorporation using the evidential
Framework. In: 2019 IEEE Intelligent Vehicles
Symposium (IV).
Biehler, Martin; Geigenfeind, Mario; Peters, Bardo (2017):
Verfahren und System zum Fernsteuern eines
Fahrzeugs. Veröffentlichungsnr: WO 2019/024963 A1
WIPOPCT.
Blissing, Björn; Bruzelius, Fredrik; Eriksson, Olle (2016):
Effects of Visual Latency on Vehicle Driving Behavior.
In: Association for Computing Machinery (Hg.): ACM
Trans. Appl. Percept., Bd. 14. 14. Aufl., S. 1–12.
Bojarski, Mariusz; Testa, Davide Del; Dworakowski,
Daniel; Firner, Bernhard; Flepp, Beat; Goyal, Prasoon
et al. (2016): End to End Learning for Self-Driving Cars.
In: CoRR.
Bout, Martijn; Brenden, Anna Pernestål; Klingegård,
Maria; Habibovic, Azra; Böckle, Marc-Philipp (2017):
A Head-Mounted Display to Support Teleoperations of
Shared Automated Vehicles, S. 62–66. DOI: 10.1145/
3131726.3131758.
Chucholowski, Frederic Emanuel (2015): Eine
vorausschauende Anzeige zur Teleoperation von
Straßenfahrzeugen. Beseitigung von
Zeitverzögerungseffekten im Fahrer-Fahrzeug-
Regelkreis. Dissertation. TUM.
Donges, Edmund (1982): Aspekte der Aktiven Sicherheit
bei der Führung von Personenkraftwagen. In:
Automobil-Industrie 27 (02), S. 183–190.
Durand, Sonia; Benmokhtar, Rachid; Perrotton, Xavier
(2019): 360° Multisensor Object Fusion and Sensor-
based Erroneous Data Management for Autonomous
Vehicles. In: IEEE Sensors Applications Symposium.
Fairfield, Nathaniel; Herbach, Joshua Seth; Furman, Vadim
(2019): Remote assistance for autonomous vehicles in
predetermined situations. Veröffentlichungsnr: US 102
41508 B2.
Fankhauser, Péter; Hutter, Marco (2016): A Universal Grid
Map Library: Implementation and Use Case for Rough
Terrain Navigation. In: Robot Operating System (ROS)
– The Complete Reference (Volume 1). Unter Mitarbeit
von A. Koubaa: Springer.
Feiler, Johannes; Hoffmann, Simon; Diermeyer, Frank
(2020): Concept of a Control Center for an Automated
Vehicle Fleet. In: IEEE International Conference on
Intelligent Transportation Systems.
Georg, Jean-Michael; Diermeyer, Frank (2019): An
Adaptable and Immersive Real Time Interface for
Resolving System Limitations of Automated Vehicles
with Teleoperation. In: 2019 IEEE International
Conference on Systems, Man and Cybernetics (SMC).
IEEE International Conference on Systems, Man and
Cybernetics. Bari, Italy, S. 2659–2664.
Georg, Jean-Michael; Feiler, Johannes; Diermeyer, Frank;
Lienkamp, Markus (2018): Teleoperated Driving, a
Key Technology for Automated Driving? Comparison
of Actual Test Drives with a Head Mounted Display
and Conventional Monitors. In: International
Conference on Intelligent Transportation Systems.
Georg, Jean-Michael; Feiler, Johannes; Hoffmann, Simon;
Diermeyer, Frank (2020): Sensor and Actuator Latency
during Teleoperation of Automated Vehicles. In: IEEE
Intelligent Vehicles Symposium 2020.
Gies, Fabian; Danzer, Andreas; Dietmayer, Klaus (2018):
Environment Perception Framework Fusing Multi-
Object Tracking, Dynamic Occupancy Grid Maps and
Digital Maps. In: International Conference on
Intelligent Transportation Systems.
Gnatzig, S.; Chucholowski, Frederic; Tang, Tito; Lienkamp,
M. (2013): A System Design for Teleoperated Road
Vehicles.
Gnatzig, Sebastian (2015): Trajektorienbasierte Tele-
operation von Straßenfahrzeugen auf Basis eines
Shared-Control-Ansatzes. Technische Universität
München, München. Lehrstuhl für Fahrzeugtechnik.
Hosseini, Amin (2018): Conception of Advanced Driver
Assistance Systems for Precise and Safe Control of
Teleoperated Road Vehicles in Urban Environments.
Dissertation, München.
Jo, Jun; Tsunoda, Yukito; Stantic, Bela; Liew, Alan Wee-
Chung (2017): A Likelihood-Based Data Fusion Model
for the Integration of Multiple Sensor Data: A Case Study
with Vision and Lidar Sensors. In: Robot Intelligence
Technology and Applications 4, S. 489–500.
Kamann, Alexander; Held, Patrick; Perras, Florian;
Zaumseil, Patrick; Brandmeier, Thomas; Schwarz,
The Perception Modification Concept to Free the Path of An Automated Vehicle Remotely
411

Ulrich T. (2018): Automotive Radar Multipath
Propagation in Uncertain Environments. In:
International Conf. on Intelligent Transportation Systems.
Kang, Lei; Zhao, Wei; Qi, Bozhao; Banerjee, Suman
(2018): Augmenting Self-Driving with Remote Control.
Challenges and Directions, S. 19–24. DOI:
10.1145/3177102.3177104.
Kroop, Benjamin; Ross, William; Heine, Andrew (2019):
Teleassistance Data Encoding for Self-Driving
Vehicles. Angemeldet durch Uber Technologies Inc.
Veröffentlichungsnr: US 10,202,126 B2.
Levinson, Jesse; Kentley, Timothy; Ley, Gabriel; Gamara,
Rachad; Rege, Ashutosh (2017): Teleoperation system
and method for trajectory modification of autonomous
vehicles. Veröffentlichungsnr: WO 2017/079219 Al.
Liu, Ruilin; Kwak, Daehan; Devarakonda, Srinivas; Bekris,
Kostas; Iftode, Liviu (2016): Investigating Remote
Driving over the LTE Network. In: ACM International
Conf. on Automotive User Interfaces and Interactive
Vehicular Applications 2016, S. 264–269.
Lockwood, Amanda; Gogna, Ravi; Linscott, Gary;
Caldwell, Timothy; Kobilarov, Marin; Orecchio, Paul
et al. (2019): Interactions between vehicle and
teleoperations system. Veröffentlichungsnr: US 2019/
0011912 A1.
Mita, Seiichi; Yuquan, Xu; Ishimaru, Kazuhisa; Nishino,
Sakiko (2019): Robust 3D Perception for any
Environment and any Weather Condition using
Thermal Stereo. In: 2019 IEEE Intelligent Vehicles
Symposium (IV).
Neumeier, Stefan; Walelgne, Ermias Andargie; Bajpai,
Vaibhav; Ott, Jörg; Facchi, Christian (2019):
Measuring the Feasibility of Teleoperated Driving in
Mobile Networks. In: 2019 Network Traffic Measure-
ment and Analysis Conf. DOI: 10.23919/TMA.2019.
8784466.
Nuss, Dominik; Reuter, Stephan; Thom, Markus; Yuan,
Ting; Krehl, Gunther; Maile, Michael et al. (2016): A
Random Finite Set Approach for Dynamic Occupancy
Grid Maps with Real-Time Application. Ulm
University, Ulm. Institute of Measurement, Control and
Microtechnology. Online verfügbar unter http://
arxiv.org/pdf/1605.02406v2.
Pan, Yunpeng; Cheng, Ching-An; Saigol, Kamil; Lee,
Keuntaek; Yan, Xinyan; Theodorou, Evangelos A.;
Boots, Byron (2017): Agile Off-Road Autonomous
Driving Using End-to-End Deep Imitation Learning. In:
CoRR abs/1709.07174.
Pendleton, Scott; Andersen, Hans; Du, Xinxin; Shen,
Xiaotong; Meghjani, Malika; Eng, You et al. (2017):
Perception, Planning, Control, and Coordination for
Autonomous Vehicles. In: MDPI Machines, Bd. 5, S.
1–54.
Pitzer, Benjamin; Styer, Michael; Bersch, Christian;
DuHadway, Charles; Becker, Jan (2011): Towards
perceptual shared autonomy for robotic mobile
manipulation. In: IEEE International Conf. on Robotics
and Automation. 2011 IEEE International Conf. on
Robotics and Automation (ICRA). Shanghai, China,
09.05.2011 - 13.05.2011.
Rong, Guodong; Shin, Byung Hyun; Tabatabaee, Hadi; Lu,
Qiang; Lemke, Steve; Možeiko, Mārtiņš et al. (2020):
LGSVL Simulator: A High Fidelity Simulator for
Autonomous Driving. Online verfügbar unter http://
arxiv.org/pdf/2005.03778v3.
Ross, Bill; Bares, John; Stager, David; Jackel, Larry;
Perschbacher, Mike (2008): An Advanced
Teleoperation Testbed. In: Field and Service Robotics.
Tang, Tito; Chucholowski, Frederic; Yan, Min; Lienkamp,
Markus (2013): A Novel Study on Data Rate by the
Video Transmission for Teleoperated Road Vehicles.
In: International Conf. on Intelligent Unmanned
Systems. 9. Aufl.
Tang Chen, Tito Lu (2014): Methos for improving the
control of teleoperated vehicles. Dissertation.
Technische Universität München, München. Lehrstuhl
für Fahrzeugtechnik.
J3016, June, 2018: Taxonomy and Definitions for Terms
Related to Driving Automation Systems for On-Road
Motor Vehicles.
ETSI TR 103 562, 2019-12: Technical Report 103 562 -
V2.1.1.
Tikanmäki, Antti; Bedrník, Tomáš; Raveendran, Rajesh;
Röning, Juha (2017): The remote operation and
environment reconstruction of outdoor mobile robots
using virtual reality. In: Proceedings of 2017 IEEE
International Conf. on Mechatronics and Automation.
Xiao, Yi; Codevilla, Felipe; Gurram, Akhil; Urfalioglu,
Onay; López, Antonio M. (2019): Multimodal End-to-
End Autonomous Driving. In: Computer Vision and
Pattern Recognition. Online verfügbar unter http://arxiv.
org/pdf/1906.03199v1.
Xu, Huazhe; Gao, Yang; Yu, Fisher; Darrell, Trevor
(2016): End-to-end Learning of Driving Models from
Large-scale Video Datasets. In: CoRR.
Zhang, Jiakai (2019): End-to-End Learning for
Autonomous Driving. New York University, New York.
Department of Computer Science.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
412
