
Advances in Hybrid Evolutionary Algorithms for
Fuzzy Flexible Job-shop Scheduling: State-of-the-Art Survey
Mitsuo Gen
1,3 a
, Lin Lin
1,2 b
and Hayato Ohwada
3c
1
Fuzzy Logic Systems Institute, Tokyo, Japan
2
School of Software, Dalian University of Technology, Dalian, China
3
Tokyo University of Science, Tokyo, Japan
Keywords: Flexible Job-shop Scheduling Problem (FJSP), Fuzzy Scheduling, Evolutionary Algorithm (EA), Genetic
Algorithm (GA), Swarm Intelligence (SI), Particle Swarm Optimization (PSO), Cooperative Co-Evolution
Algorithm (CEA).
Abstract: Flexible job shop scheduling problem (FJSP) is one of important issues in the integration of research area and
real-world applications. The traditional FJSP always assumes that the processing time of each operation is
fixed value and given in advance. However, the stochastic factors in the real-world applications cannot be
ignored, especially for the processing times. In this paper, we consider FJSP model with uncertain processing
time represented by fuzzy numbers, which is named fuzzy flexible job shop scheduling problem (F-FJSP). We
firstly review variant FJSP models such as multi-objective FJSP (MoFJSP), FJSP with a sequence dependent
& set time (FJSP-SDST), distributed FJSP (D-FJSP) and a fuzzy FJSP (F-FJSP) models. We secondly survey
a recent advance in hybrid genetic algorithm with particle swarm optimization and Cauchy distribution
(HGA+PSO) for F-FJSP and hybrid cooperative co-evolution algorithm with PSO & Cauchy distribution
(hCEA) for large-scale F-FJSP. We lastly demonstrate the HGA+PSO and hCEA show that the performances
better than the existing methods from the literature, respectively.
1 INTRODUCTION
The scheduling problem is an important research
topic as it is an interface between typical
combinatorial optimization problems (COP) in the
research area and application models in real-world
production systems (Palacios et al 2015). Shop
problems receive particular attention because they
can model many situations and describe the flexibility
of production systems (Pinedo 2016). Flexible job
shop scheduling (FJSP), which is an extended version
of job shop scheduling (JSP), is a typical shop
problem and is widely studied and applied. FJSP can
be viewed as a combination of two subproblems: the
operation sequence (OS) problem, which means
sequencing all operations of jobs in a reasonable
order, and machine assignment (MA) problem, which
means assigning the suitable and available machine
for each ordered operation. Each operation processed
on different machines has a different machine has a
different processing time.
a
https://orcid.org/0000-0002-3670-1357
b
https://orcid.org/0000-0003-1615-6045
c
https://orcid.org/0000-0001-5621-6984
Most researchers assumed that the processing
time of job was a determined value. In fact, this
assumption is too idealistic as uncertain and
ambiguous factors cannot be ignored in actual
production systems (Behnamian 2016). By modeling
parameters in scheduling problems as fuzzy numbers
such as a triangle fuzzy number (TFN), fuzzy
scheduling can help incorporate flexibility into
scheduling algorithms, and make the scheduling model
meet the needs of users (Guiffrida & Nagi 1998).
Recently, Gao, et al (2019) reported a review on
swarm intelligence and evolutionary algorithms for
solving flexible job shop scheduling problems
including fuzzy and uncertain FJSP Models. Gu, et al
(2019) proposed an improved genetic algorithm with
adaptive variable neighbourhood search method for
solving FJSP. Gao, et al (2020) proposed a
differential evolution (DE) algorithm improved by
selection mechanism for solving fuzzy job-shop
scheduling problem in which the processing time and
due date of operation can be expressed by fuzzy
562
Gen, M., Lin, L. and Ohwada, H.
Advances in Hybrid Evolutionary Algorithms for Fuzzy Flexible Job-shop Scheduling: State-of-the-Art Survey.
DOI: 10.5220/0010429605620573
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 1, pages 562-573
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

numbers. Shi, et al (2020) proposed immune genetic
algorithm for solving a MoFJSP with fuzzy
processing time. Lin, et al (2019) proposed a hybrid
multi-verse optimization for solving the fuzzy FJSP
and Zhu and Zhou (2020) proposed a multi-micro-
swarm leadership hierarchy-based optimization
algorithm for solving the FJSP with job precedence
constraints and interval grey processing time. It is
very important to analyse recent papers published on
solution methods of Fuzzy FJSP models for creating
a future research direction and applying them to the
real-world practical problems in the manufacturing or
logistics systems based on the hybrid evolutionary
algorithms (HEA).
In this paper, we firstly review variant FJSP
models such as multi-objective FJSP, FJSP with a
sequence dependent & set time (FJSP-SDST),
distributed FJSP (D-FJSP) and fuzzy FJSP (F-FJSP)
models. We secondly survey a recent advance in
hybrid PSO with GA and Cauchy distribution
(HGA+PSO) for F-FJSP and hybrid cooperative co-
evolution algorithm with PSO & Cauchy distribution
(hCEA) for large-scale F-FJSP. Lastly we demonstrate
the HGA+PSO and hCEA show that the performances
better than the existing methods from the dataset of
FJSP and large-scale F-FJSP, respectively.
2 FLEXIBLE JSP MODELS
The FJSP consists of two sub-problems: machine
assignment and operation sequencing (Garey et al
1976 & Brucker et al 1990). The former is to select a
machine from a candidate set for each operation while
the latter is to schedule all operations on all machines
to obtain satisfactory schedules. The FJSP is very
complex and has been proven to be an NP-hard
problem (Jain et al 1998). Here is a reason to use a
metaheuristic such as a genetic algorithm (GA) for
treating JSP or FJSP models (Gen et al 1994 &
Kacem et al 2002).
Recently hybrid genetic algorithms (HGA) are
proposed to solve the complex re-entrant scheduling
problem with time windows constraint in
manufacturing HDD devices with lot size. This
problem can be formulated as a deterministic
Fm|fmls, rcrc, temp|C
MAX
problem for finding the
scheduling operations of machines in a flow-shop
environment processing fmls job family with the
objective of minimizing the makespan, C
MAX
.
(Chamnanlor et al 2013). Sangsawang, et al (2015)
proposed metaheuristics optimization approaches for
solving the two-stage reentrant reentrant flexible
flow-shop scheduling (RFFS) problem with blocking
constraint (FFS|2-stage,rcrc,block|Cmax) in which
they applied a hybrid GA and a hybrid particle swarm
optimization (HPSO) with Cauchy distribution.
2.1 Flexible Job-shop Scheduling
Models
Gen, et al. (1994) proposed a genetic algorithm for
solving the job-shop scheduling problem (JSP).
Cheng, et al. (1996 & 1999) reported a tutorial survey
of JSP using genetic algorithms: representation and
hybrid genetic search strategies, respectively.
Flexible job-shop scheduling problem (FJSP) is
an extension of the traditional job-shop scheduling
problem, which provides a closer approximation to
real scheduling problems. The FJSP can be viewed as
a combination of two subproblems: the operation
sequence (OS) problem, which means sequencing all
operations of jobs in a reasonable order, and machine
assignment (MA) assignment problem, which means
assigning the suitable and available machine for each
ordered operation. Each operation processed on
different machines has a different processing time.
The maximum completion time of the jobs is defined
as makespan. The objective is to minimize the
makespan by optimizing the OS and MA. In the job-
shop scheduling problem (JSP), there are n jobs that
must be processed on a group of m machines. Each
job i consists of a sequence of m operations (o
i1
, o
i2
,
…, o
im
), where o
ik
(the k-th operation of job i) must be
processed without interruption on a predefined
machine m
ik
for p
ik
time units. The operations o
i1
, o
i2
,
…, o
im
must be processed one after another in the
given order and each machine can process at most one
operation at a time. In a flexible job-shop, each job i
consists of a sequence of n
i
operations (o
i1
, o
i2
,…, o
ini
). The FJSP extends JSP by allowing an operation o
ik
to be executed by one machine out of a set A
ik
of given
machines. The processing time of operation o
ik
on
machine j is p
ikj
> 0. The FJSP problem is to choose
for each operation o
ik
a machine M(o
ik
) ∈ A
ik
and a
starting time s
ik
at which the operation must be
performed. Wang, et al (2012) reported a hybrid
genetic algorithm combined a population
improvement strategy for solving the multi-objective
FJSP. The flexible job shop scheduling problem is as
follows: n jobs are to be scheduled on m machines and
each job i contains n
i
ordered operations.
The multiobjective FJSP (Mo-FJSP) model
minimizing 1) the makespan, 2) the maximum
machine workload and 3) the total workload, will be
formulated as a multiobjective mixed integer
programming (MoMIP) model as follows (Gen,
Cheng & Lin 2008).
Advances in Hybrid Evolutionary Algorithms for Fuzzy Flexible Job-shop Scheduling: State-of-the-Art Survey
563

}{maxmin
,
M ik
ki
ct =
(1)
}{maxmin
jM
WW
j
=
(2)
=
=
m
j
WW
1
jT
min
(3)
jiKkcxtc
ikiikjikjik
,;,...,2,0.t.s
)1(
∀=≥−−
−
(4)
=
∀=
m
j
ikj
ikx
1
,,1
(5)
0)[(]0)[( ≥−−∨≥−−
ikjhgjikjhgikikjhgjhgjikhg
xxtccxxtcc
jghki ),,(),,(∀
(6)
ikjx
ikj
,,},1,0{ ∀∈
(7)
ikc
ik
,,0 ∀≥
(8)
The objective functions accounts Eq. (1) is to
minimize the makespan, Eq. (2) is to minimize the
maximal machine workload (i.e., the maximum
working time spent at any machine), Eq. (3) is to
minimize the total workload (i.e., the total working
time over all machines). Inequality (4) states that the
successive operation has to be started after the
completion of its precedent operation of the same job,
which represents the operation precedence
constraints. Eq. (5) states that one machine must be
selected for each operation. Inequality (6) is a
disjunctive constraint, where one or the other
constraint must be observed. Eqs. (7, 8) are variable
restrictions. Gao, Gen and Sun (2006) developed a
new hybrid GA to solve the flexible job-shop
scheduling problem with non-fixed availability
constraints. Gao, Gen, Sun and Zhao (2007) proposed
a hybrid of genetic algorithm combined the bottleneck
shifting for solving multiobjective flexible job-shop
scheduling problems, Gao, Sun and Gen (2008) also
proposed a hybrid genetic algorithm (HGA)
combined with variable neighbourhood descent
(VND) method for solving multiobjective FJSP
model. Gen, Gao and Lin (2009) reported a
multistage-based genetic algorithm (MSGA) with
bottleneck shifting developed for treating the
multiobjective FJSP model. Recently Gong, Deng,
Gong and Liu (2018) proposed a memetic algorithm
(MA) for solving multi-objective flexible job-shop
problem with worker flexibility in which the MA is
one of evolutionary algorithms.
2.2 SDST and Distributed FJSP Models
Most researches of the job-shop scheduling problems
ignored the setup times or considered them as a part
of the processing time. However, in many real-life
situations such as chemical, printing, pharmaceutical
and automobile manufacturing, the setup times are
not only often required between jobs but they are also
strongly dependent on job itself (sequence
independent) and the previous job that ran on the
same machine (sequence dependent). Hence,
reducing setup times is an important task to improve
shop performance (Azzouz, et al 2016). The FJSP has
been widely studied by various methods, however,
few papers have considered this problem with setup
In this Subsection, we introduced the FJSP with a
sequence dependent setup times (SDST). The realistic
application based on the FJSP-SDST model SDST
constraints will be considered manufacturing
scheduling systems for the TFT-LCD (thin-film
transistor-liquid crystal display) in Section: TFT-
LCD Module Assembly Scheduling (Chou et al
2014).
The distributed and flexible jobshop scheduling
problem (DFJSP) is a multi-factory manufacturing
environment and a manufacturing system comprising
several sub-systems (also called manufacturing cells)
in which each cell is a flexible job-shop. DFJS
examples can be a multi-factory network in which
factories are geographically distributed, and can be a
multi-cell plant where several manufacturing cells are
located in the same plant. To reduce overall
completion time, the assignment of jobs to cells is
very important because it shall affect cell loading
profiles. In summary, a DFJS problem involves three
scheduling decisions: 1) job-to-cell assignment, 2)
operation sequencing, and 3) operation-to-machine
assignment (Liu et al 2014).
In the FJSPs, it involves the following problems:
1) the operation sequence for each machine;
2) the precedence constraints for the operations
involved in a job; and
3) machine selection with due consideration of
machine capability constraints.
DFJSPs can be considered as an extension of
FJSPs, but also the selection of suitable factories or
flexible manufacturing units since assigning specific
jobs to different factories results in dissimilar
production schedules, in which influences the supply
chain (Liu et al 2014). Recently, Lu et al (2018)
proposed a new and concise chromosome
representation which models a 3-dimensional
scheduling solution for solving distributed and flexible
job-shop scheduling problem (DFJSP) models.
SDMIS 2021 - Special Session on Super Distributed and Multi-agent Intelligent Systems
564

Table 1: List of Fuzzy FJSP or Uncertain FJSP models and methodology.
Authors (year)
Mathematical or
Problem models
Objectives Methodology
Journal or
Proceedings
Tsujimura, Gen, Kubota
(1995)
Fuzzy-JSP
Triangle Fuzzy Num
Fuzzy makespan Genetic Algorithm
J. Japan Soc. of Fuzzy
The. & Sys.
Kuroda, Wang (1996) Fuzzy-JSP Fuzzy makespan Genetic Algorithm Int. J. Prod. Econ.
Sakawa, Mori (1999)
Fuzzy-JSP
Fuzzy Due Date
Makespan Genetic Algorithm Comput. & Ind. Eng.
Niu, Jiao, Gu (2008) Fuzzy-JSP Makespan
Hybrid Particle Swarm
Opt. & GA
Appl. Math. Comput.
Lei (2010a)
FJSP, Fuzzy processing
time
Fuzzy makespan Genetic Algorithm Int. J. Prod. Res.
Lei (2010b)
FJSP, Fuzzy processing
time
Fuzzy makespan
Swarm Intelligence,
neighborhood search
Comput. & Ind. Eng.
Lei (2010c)
F-JSP, Fuzzy
processing time
Fuzzy makespan
Random key genetic
algorithm
Int. J. Adv. Manuf.
Technol.
Wang, Gao, Zhang, Li
(2012)
Mo-FJSP, Fuzzy
processing time
Tardiness, makespan
Multi-objective Genetic
Algorithm
Int. J. Comp. Appl.
Technol.
Lei (2012)
FJSP, Fuzzy processing
time
Fuzzy makespan
Co-evolutionary genetic
algorithm
Appl. Soft Comput.
Zheng, Li, Lei (2012)
Mo-FJSP, Fuzzy
processing time
Makespan, Tardiness
Multiobjective swarm,
neighborhood search
Int. J. Adv. Manuf.
Technol.
Lei, Guo (2012)
FJSP, Fuzzy processing
time
Makespan
Swarm Intelligence,
neighborhood search
Int. J. Prod. Res.
Wang, Wang, Xu and
Liu (2013)
Mo-FJSP, Fuzzy
processing time
Fuzzy makespan
Estimation of
Distribution Algorithm
Int. J. Product. Res.
Li, Pan (2013)
FJSP, Fuzzy processing
time
Fuzzy makespan Hybrid discrete PSO
Int. J. Adv. Manuf.
Technol.
Hao , Lin, Gen and
Chien (2014)
Bi-criteria stochastic
JSP
Makespan, Tardiness
Markov Network based
EDA
Proc. IEEE Conf. Auto.
Sci. & Eng.
Xu, Wang, Wang, Liu
(2015)
FJSP, Fuzzy processing
time
Fuzzy makespan
Teaching-learning
based Optimization
Neurocomputing
Xu, Wang, Wang and
Liu (2015)
FJSP-Fuzzy processing
time
Fuzzy makespan,
Teaching–Learning
based Optimization
Neurocomputing
Palacios, Gonzlez,
Vela, et al (2015a)
FJSP-Fuzzy processing
time
Fuzzy makespan Coevolutionary EA Fuzzy Sets. Syst.
Palacios, Gonzlez,
Vela, et al (2015b)
FJSP-Fuzzy processing
time
Fuzzy makespan Genetic tabu search Comput. & Oper. Res.
Hao, Gen, Lin and Suer
(2017)
Bi-criteria stochastic
JSP
Makespan, Tardiness Multiobjective EDA J. Intelligent Manuf.
Jamrus, Chien, Gen,
Sethan (2018)
Fuzzy FJSP Fuzzy makespan
Hybrid PSO + GA +
Cauchy distribution
IEEE Trans. Semicon.
Manuf.
Sun, Lin, Li, Gen
(2019)
Stochastic FJSP Expected makespan
Cooperative Co-EA
MRF-based decomp.
Mathematics
Lin, Zhu, Wang (2019) Fuzzy FJSP Fuzzy makespan
Hybrid multi-verse
optimization (HMVO)
Comput. & Ind. Eng.
Sun, Lin, Gen, Li
(2019)
Fuzzy FJSP Fuzzy makespan
Cooperative Co-
Evolution algorithm
IEEE Trans. Fuzzy
Systems
Gao, Wang, Pedrycz,
(2020)
Fuzzy Job-shop
Scheduling Problem
Fuzzy makespan and
due date
DE algorithms with
selection mechanism
IEEE Trans. on Fuzzy
Systems
Shi, Zhang, Li (2020) Mo-FJSP
Fuzzy Makespan and
Energy consumption
immune genetic
algorithm
Int. J. Simulation
Modelling
Zhu, Zhou (2020)
FJSP-Interval grey
processing time
Fuzzy makespan, Inter.
grey makespan
Multi-micro-swarm
leadership hierarchy
Comput. & Ind. Eng.
Advances in Hybrid Evolutionary Algorithms for Fuzzy Flexible Job-shop Scheduling: State-of-the-Art Survey
565

3 FUZZY OR UNCERTAIN FJSP
MODELS
The traditional FJSP always assumes that the
processing time of each operation is fixed value and
given in advance. However, the stochastic factors in
the real-world applications cannot be ignored,
especially for the processing times (Hao et al 2014,
Sun et al 2019). The fuzzy number can be
transformed into an interval number on the basis of a
cut set such as a triangle fuzzy number (TFN). It
translates interval data into real number data through
a specific pre-processing procedure, and then carries
out principle component analysis for a real number
data set. In practice, processing times can be more
accurately represented as intervals with the most
probable completion time somewhere near the middle
of the interval. A fuzzy number which is essentially a
generalized interval can represent this processing
time interval exactly and naturally. The fuzzy number
typically represents more information than an interval
number does.
An overview of the articles on fuzzy or stochastic
FJSP based on the genetic algorithms or related
metaheuristics is given in Table 1. For each article it
separated by Authors, Mathematical or Problem
models, Objectives, Methodology, and Journal or
Proceedings without sequence dependent setup times
(SDST) or distributed FJSP models.
4 FUZZY FJSP MODEL BY
HGA+PSO+CAUCHY
Since the production for semiconductor wafer
fabrication changes rapidly, a scheduling solution
must be able to obtain a near-optimal solution within
a short time that has crucial effects on the overall
efficiency of semiconductor manufacturing (Wang et
al 2015). Indeed, most of wafer fabrication machines
can perform multiple operations, while the processing
time depends on the selected machines. Furthermore,
wafer fabrication scheduling is increasingly
complicated, since multi-chamber machines
equipped with advanced process control and
advanced equipment control. Here is a reason to
combine a fuzzy theory with the manufacturing
(Jamrus et al 2018).
4.1 Mathematical Model of Fuzzy FJSP
In the fuzzy FJSP, each job i consists of a sequence
of ni operations, an operation o
ik
will be executed by
one machine out of a set A
ik
of given machines. The
fuzzy processing time of operation o
ik
on machine j is
˜p
ikj
with a positive integer. The FJSP needs choosing
for each operation oik a machine M(o
ik
) ∈ A
ik
and a
starting time s
ik
that the operation must be performed.
For formulating a F-FJSP model to find the job
sequence which minimizes the makespan with fuzzy
processing time, we assume is the following issues:
1) Each job is processed on one machine at a time.
2) Every machine processes only one job at a time.
3) The setup time for the operations is sequence
independent and are included in the processing
time.
4) The operation sequence of a job is specified in
advance.
5) There are no precedence constraints among
operations of different jobs.
6) The operations are not pre-emptive once an
operation has started. That is, it cannot be
stopped until it has finished.
The typical fuzzy flexible job-shop scheduling
problem (F-FJSP) model minimizing a fuzzy
completion time is formulated as a mixed nonlinear
integer programming (MNIP):
}
~
max{
~
min
M in
cc =
(9)
inkjxpcc
iikjikjkiik
∀=∀≥−
−
;,...,2;,
~~~
.t.s
)1(
(10)
∈
∀=
ik
Aj
ikj
ikx ,,1
(11)
jghkipxxcc
hgjikjhgjikhg
),,(),,(
~
,
~~
∀≥−
(12)
ikjx
ikj
,,},1,0{ ∀∈
(13)
ikc
jk
,,0
~
∀>
(14)
Eq. (9) is used to minimize the maximum flow time.
Inequality (10) ensures that operations are indexed in
the order they are processed. Eq. (11) states that one
machine could be selected from the set of available
machines of the operation. Inequality (12) ensures
that two operations are not overlapping if both of
them are assigned on the same machine. Eqs. (13) and
(14) are variable restrictions.
To solve a fuzzy FJSP in which the max operation
of two triangular fuzzy numbers (TFNs) are the
plainness and flexibility of the fuzzy arithmetic
operations and the ranking method of fuzzy numbers,
the addition operation is used to calculate the fuzzy
makespan of an operation. The max operation is used
to determine the fuzzy beginning time of an
operation, in which the ranking method is to compare
SDMIS 2021 - Special Session on Super Distributed and Multi-agent Intelligent Systems
566

the maximum fuzzy makespans and we can refer it for
the detailed procedures (Jamrus et al 2018).
4.2 Hybrid GA with PSO & Cauchy
Distribution
Particle Swarm Optimization (PSO) as one of
evolutionary algorithms (EA) is a randomized
population-based optimization method based on the
simulation of social iterations by the flocking
behavior of birds and human social interactions
(Kennedy 1997 and Yu & Gen 2010). It is initialized
with a population of random candidate solutions as
particles (Kennedy & Eberhart 1995). It combines a
local search according to self-experience and a global
search according to neighboring experience, thus
demonstrating high search efficiency. The position of
each particle such as the kth particle x
k
(t) is a potential
solution of the problem. Each particle remembers the
best position thus far during the search process
(h
bestk
), and knows the global best position of the
swarm (g
best
). The particle’s fitness can be calculated
by entering its position in a designated objective
function as shown in the following equations:
))()(())()(()()1(
2211
txtgrctxthrctvtv
kkkkk
−+−+=+
(15)
)1()()1( ++=+ tvtxtx
kkk
(16)
where h
k
(t): the historically local best position of the
kth particle, g(t): the global best position of the
swarm, c
1
and c
2:
positive constants, called the
acceleration constants, r
1
, r
2
∈ [0,1]: uniform random
numbers. The PSO is to find optimal regions of
complex search spaces through the interaction of
individuals in a population of particles.
However, PSO cannot yield good solutions for
large scale problems including high-dimensional
variables. For solving this problem, a basic idea
proposes new mutation operation by using the effective
particles moving by the Cauchy distribution. The
Cauchy distribution has a Gaussian-like peak wing that
imply occasional long jumps among local sampling.
22
2
2
1
)1()1()1(
)1(
)1(
+++++
+
=+
tvtvtv
tv
tu
kNkk
k
k
(17)
))1,0[
2
tan()1()1( randtuts
kk
⋅⋅+=+
π
(18)
)1()()1( ++=+ tstxtx
kkk
(19)
where u
k
(t) and s
k
(t) are variables from updating each
position k in generation t according to the Cauchy
distribution for evaluating each particle and updating
the h
bestk
and g
best
values of the current particle.
Pseudocode of the hybridized PSO with GA and
Cauchy distribution designed as follows (Figure 1):
Algorithm: HGA+PSO for Fuzzy FJSP (minimize
makespan)
Input: problem data and PSO (f(x), v
k
(0), [hbest
k
], gbest, b
1
,
b
2
) and GA parameters (popSize, maxGen, p
M
, p
C
)
Output: the best solution: gbest
Process:
1: t <- 0;
2: initialize x
k
(t) by operation & machine-based encoding;
P(t) ={x
k
(t)}
3: evaluate x
k
(t) by decoding and keep the best solution;
4: while (not terminating condition) do end;
5: for each particle x
k
(t) in swarm do
6: update velocity v
k
(t+1) using (15);
7: calculate u
k
(t+1) and s
k
(t+1) using (17) and (18);
8: update position x
k
(t+1) using (19) & adjust x
k
(t+1)
by rounding routine;
9: evaluate x
k
(t+1) by decoding routine;
10: if f(x
k
(t+1)) < f(hbest
k
) then
11: update hbesl
k
= x
k
(t+1); update the local best;
12: end
13: if f(x
k
(t+1)) < f(gbest) then
14: update gbest = x
k
(t+1); update the global best
15: P(t) = x
k
(t+1) & create offspring C(t) from P(t) by WMX;
16: create offspring C(t) from P(t) by insertion mutation;
17: check-and-repair C(t) for feasible solution;
18: evaluate C(t) by decoding routine and update best
solution gbest;
19: reproduce P(t+1) from P(t) and C(t) by selection;
19: t <- t+1;
20: end;
Figure 1: Pseudocode of the hybrid PSO with GA and
Cauchy distribution.
4.3 Numerical Experiment by
HGA+PSO
Six problems were generated and all problems
represented different numbers of jobs, operators, and
machines. Each problem was characterized by the
following parameters: number of jobs (n), number of
machines (m), and each operation o
ik
of job i. One
problem instances were a 3×3 problem consisting of
three jobs and three machines as shown in Table 2.
Table 2: 3×3 problem consisting of 3 jobs & 3 machines.
Processing time M
1
M
2
M
3
J
1
O
11
(4,6,7) (1,2,3) (1,2,4)
O
12
(3,5,6) (1,2,4) (1,3,4)
O
13
(5,8,9) (2,3,4) (1.2.3)
J
2
O
21
(1,2,3) (2,4,5) (5,6,7)
O
22
(2,5,6) (2,3,4) (1,2,3)
O
23
(4,6,7) (1,2,4) (1,3,5)
J
3
O
31
(4,8,9) (2,4,6) (1,2,3)
O
32
(5,7,9) (3,4,7) (1,2,3)
O
33
(2,3,5) (1,2,3) (1,2,4)
Advances in Hybrid Evolutionary Algorithms for Fuzzy Flexible Job-shop Scheduling: State-of-the-Art Survey
567
In addition, the benchmarks of instances 1 and 2 (Jia
et al 2014) were selected for fuzzy processing time,
for which the author used a decomposition integration
genetic algorithm (DIGA).
To demonstrate the efficiency and effectiveness of
the HGA+PSO in solving a fuzzy FJSP with uncertain
processing time, each numerical experiment was
performed 10 time with maxIter = 500. Moreover, the
PSO parameters for the numerical experiments
included number of particles = 50. For the GA, the
probability of crossover was 0.8 and the probability
of mutation was 0.2. The proposed algorithms were
run using Matlab on a 2.10 GHz PC.
The performance of PSO and HGA+PSO was
evaluated using test problems of different sizes. The
computational results from comparing the best and
average makespans of each solution were derived.
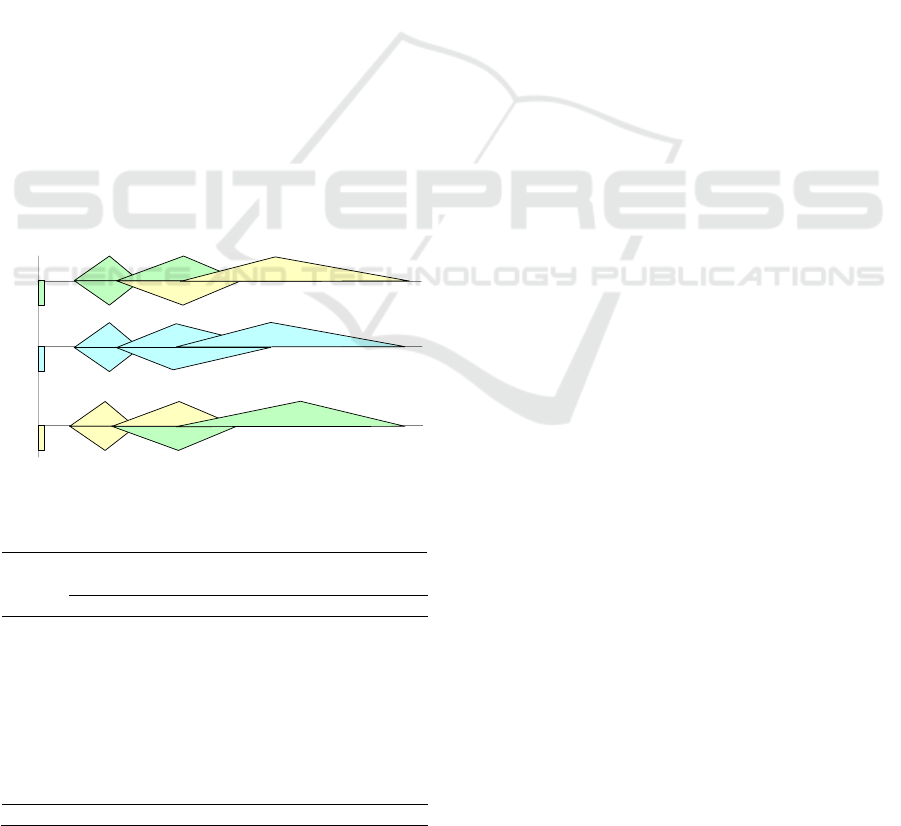
The best scheduling of the 3×3 problem was achieved
by using the HGA+PSO and is shown in Figure 2.
However, the combined approach obtained average
computational time for the best solution.
Table 3 presents ANOVA results, which show a
36.78% improvement from the fuzzy flexible job-
shop scheduling. The percentage improvement
differed significantly from actual practices at the 95%
reliability level and yielded a P value less than 0.05.
The parameter describing this difference was the
fluctuation of demand at 60% of an average of which
yielded the highest average improvement.
Figure 2: The best solution of problem 3x3 by HGA+PSO.
Table 3: Results of ANOVA Analysis.
No.
Factor
Average value of fuzzy
makes
p
an [unit time]
% of
im
p
.
Pro. % PSO HPSO+GA
1-5 1 20 55.50 32.00 42.34
6-10 1 40 55.84 32.53 41.75
11-15 1 60 58.04 28.75 50.47
16-20 2 20 65.89 45.89 30.36
21-25 2 40 66.64 45.48 31.75
26-30 2 60 66.10 46.06 30.33
31-35 3 20 78.21 51.42 34.25
36-40 3 40 78.23 50.20 35.84
41-45 3 60 80.84 53.45 33.89
Average 67.26 42.86 36.78
The HGA+PSO were a combination of PSO and
GA. The advantages of PSO are intelligent and easy
derivation of the solution and that it can be combined
with the Cauchy distribution for effective particle
movement. The advantage of HGA+PSO is that it
finds the solution quickly and the better solution is
acceptable. Thus, the HGA+PSO outperform the
conventional approaches for solving an FJSP under
uncertain processing time.
5 LARGE-SCALE FUZZY FJSP
Most researchers assumed that the processing time of
job was a determined value. In fact, this assumption
is too idealistic as uncertain and ambiguous factors
cannot be ignored in actual production systems
(Behnamian 2016). Fuzzy sets can provide a bridge
between classical problem models and the needs of
users in real-world applications. Moreover, fuzzy sets
have contributed to enhancing the robustness and
applicability of scheduling (Palacios et al 2015). By
modelling parameters in scheduling problems as
fuzzy numbers, fuzzy scheduling can help incorporate
flexibility into scheduling algorithms, and make the
scheduling model meet the needs of users (Ouelhadj
et al 2009).
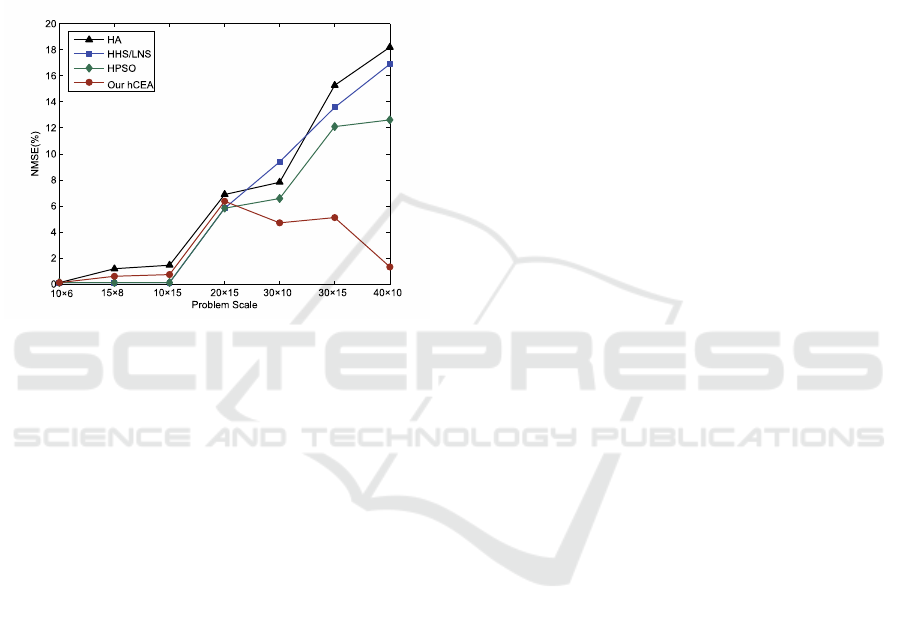
The increasing scale of FJSP models results in an
exponential increase in the size of the solution space.
Therefore, the performance of traditional EAs always
decrease with the increasing problem size, as shown
in Figure 3 (Sun et al 2019). To overcome high
dimensional issues, a divide-and-conquer (D&C)
strategy is a natural approach. Recently, the
cooperative coevolution (CC) framework has become
popular in the research area of high dimensional
optimization, especially for large- scale mathematical
function optimization (Wang et al 2018).
5.1 Mathematical Model of Fuzzy FJSP
In the FJSP, a number of jobs must be scheduled
according to a given sequence of all operations and
assigned the corresponding machines involving the
various constraints. As mentioned early section, the
FJSP consists of two subproblems: OS and MA. The
objective is to find a schedule with minimum
makespan C
max
. The assumptions are as follows:
1)
Each job is only processed once and the
processing time involves the transfer and setup
times.
2)
Each operation can be processed on any available
machine.
M
1
M
2
M
3
O
21
O
11
O
31
O
21
O
22
O
23
O
23
O
11
O
12
O
13
O
31
O
32
O
32
O
33
O
33
O
22
O
13
O
12
SDMIS 2021 - Special Session on Super Distributed and Multi-agent Intelligent Systems
568
3) Each machine can only process one operation at
a time without interruption.
4)
There exist predetermined precedence
constraints among operations within a job.
5)
Machine breakdowns are not considered. The
processing time in Fuzzy FJSP is represented as
a triangular fuzzy number (TFN).
The objective of F-FJSP is to find a schedule with
the minimum fuzzy makespan. For the detailed
operation on the triangular fuzzy number, we can
refer several references such as Gen and Cheng
(2000) and Sun, Lin, Gen and Li (2019).
Figure 3: Trend chart of algorithm performance.
A nonlinear mixed integer programming model is
used to formulate F-FJSP and the detail is shown as
follows:
]}}
~
[max{max{max]
~
[min
max
T
ikj
jki
tECE =
(20)
ikj
S
ikj
T
ikj
ptt
~
~~
where +=
=
∀≤
m
j
ikj
kix
1
,1.t.s
(21)
)1(,,
~
~~
)1(
−∀≥−
−
kkjiptt
ikj
T
jki
S
ikj
(22)
jtxtx
txtx
ii
ii
n
k
S
jikjik
n
i
n
k
T
ikjikj
n
i
n
k
S
jikjik
n
i
n
k
S
ikjikj
n
i
∀⋅≤⋅
∧⋅≤⋅
====
====
),
~~
)
~~
1'
''
111
1'
''
111
(
(
( 2 3 )
kjix
ikj
,,}1,0{ ∀∈
(24)
jkitt
T
ikj
S
ikj
,,,0
~
,
~
∀≥
(25)
where the purpose of objective function (20) is to
minimize the fuzzy makespan, (21) ensures that each
machine can only process one operation at a time
without interruption; (22) and (23) denote the
operation precedence constraints, and state that the
successive operation must start after the completion
of its previous operation of the same job; and (24) and
(25) define the domain of variables.
To solve a large scale F-FJSP in which the max
operation of two triangular fuzzy numbers (TFNs) are
the plainness and flexibility of the fuzzy arithmetic
operations and the ranking method of fuzzy numbers,
the addition operation is used to calculate the fuzzy
makespan of an operation. The max operation is used
to determine the fuzzy beginning time of an
operation, in which the ranking method is to compare
the maximum fuzzy makespans and we can refer it for
the detailed procedures (Sun et al 2019).
5.2 Hybridizing Cooperative EA+PSO
5.2.1 Representation and Genetic Operation
The design of evolutionary representation is a
significant issue in EAs as it represents the possible
potential solutions of problems. The fuzzy FJSP can
be viewed as a combination of two subproblems: how
to perform the operations by an OS, and how to
allocate a machine to each operation.
In the hCEA, the job-based and integer-based
encodings are adopted for the OS string and MA
string, respectively (Gen et al 2009). An illustration
of multistage representation for GA is shown in
Figure 4, in which the length of these two strings are
both equal to n
i
, which denotes the number of total
operations. The OS string consists of the integers
ranging from 1 to the maximum job number n. By
scanning the OS string, the kth appearance of integer
i denotes O
ik
. The MA string consists of the integers
ranging from 1 to the maximum machine number m.
Each integer requires a modular |M
ik
| arithmetic to
ensure feasibility, where |M
ik
| represents the size of
the available machine set for O
ik
.
As one of the main genetic operators, crossover
plays an important role because suitable genetic
operations can pass the parents’ good features to the
offspring. In this paper, we applied two crossover
operators: precedence operation crossover (POX)
and job-based order crossover (JOX) to the OS
string. The selection operator simulating the rule of
“survival of the fittest” in nature makes efficient
search possible by reserving superior individuals and
eliminating inferior individuals. We adopt both
ranking selection and tournament selection.
5.2.2 Cooperative Coevolution Algorithm
Recently, Sun et al (2019) is designed a CE
framework for scheduling problems with suitable
Advances in Hybrid Evolutionary Algorithms for Fuzzy Flexible Job-shop Scheduling: State-of-the-Art Survey
569

representation and evolutionary operators. The hybrid
EA is embedded into the CE framework and is called
hybrid cooperative coevolution algorithm (hCEA).
The D&C technique decomposes one solution
space to be addressed into several sub solutions,
which is regarded as an effective strategy for solving
large-scale problems. Yao et al proposed a CE
framework that was used to solve large-scale
mathematical function problems with
nonindependent variables (Li & Yao 2012). Yao et al.
first provided the theoretical proof from the
probabilistic view as well. The theoretical proof
provides the reasonableness of importing CE
framework into our algorithm. The pseudocode is
given in algorithm hCEA in Figure 4.
1)
Dynamic Grouping: The individual is
twice the number of total operations, N variables are
grouped into r groups, each subindividual contains
only part of the variables among N variables. The
popSize subindividuals with the same grouping status
form subpopulations (sub p). CEA adopts a similar
but simpler scheme. CEA adjusts group size r
randomly during the process of optimization among a
given set R = {2, 5, 10, 50, 100} when (gbest(h) is not
continuously improved. All variables are regrouped
according to new r’ (line:4–6).
2)
Cooperative Coevolution: In CEA (Sun,
et al 2019), each individual is evaluated according
to the other individuals with the optimal performance
in the same population. This function can be
implemented by b(q, tar, ref), which reflects the
performance between the individual composed by ref
with the q
th
component replaced by the corresponding
component of tar and the performance of ref.b (q,
sub_ind(h), p_best(h)) returning true means that the
q
th
component of sub ind(h) has better performance.
The CEA updates p_best(h) with its q
th
component
replaced by the q
th
component of sub ind(h) (line:6–
10). The gbest is updated in the same way (line:11–
12). Then, the local best individual (lbest) is updated
through the calculated fitness. lbest is defined as the
best individual among the (u−1)
th
, u
th
, and the (u+1)
th
individuals (line:18–20).
3)
Self-Adaptive Mechanism: The update
equation of PSO adopted in CEA is expressed as
x
i
C
(h+1) = p
best
(h) + C(1) · |p
best
(h)− g
best
(h)| (26)
where
C(1) represents a Cauchy distribution with 1 as
the parameter. pbest(h) and gbest(h) represent the
personal best individual and the global best individual
in the h
th
generation, respectively. The new update
strategy is written for searching wider solution space
as follows:
x
i
N
(h+1) = p
best
(h) + N(0,1) · |p
best
(h)− l
best
(h)| (27)
where lbest(h) represents the neighborhood best
individual in the h
th
generation. N(0,1) represents
standard normal distribution. To strike a balance
between local search and global search, two update
strategies are combined, which can be rewritten as
follows:
+
≥+
=+
otherwise.),1(
)1,0(randif),1(
)1(
N
hx
phx
hx
i
C
i
i
(28)
<
=
otherwise,
(0,1)if,N(0.5,0.3)
ξ
p
f
p
U
(29)
where f
p
is a selection probability. The hCEA adjusts
the selection probability p according to (29). In this
paper, the number of generations for adjusting p is set
to 15.
Algorithm: Hybrid CEA+PSO
Input: Data sets; maxGen; isAdjust
Output: Best solution gbest(h);
Process:
1: get sub p(h) by random grouping, s = N/r;
2: gen(h) ← 0
3: while (gen(h) < maxGen) do
4: if (isAdjust) then
5: adjust the grouping status, s_ = N/r_;
6: for each group q do
7: for each individual sub ind(h) in group q do
8: if b(q, sub ind(h), pbest(h)) then
9: replace (q, pbest, sub ind(h));
10: end
11: if b(q, pbest(h), gbest(h)) then
12: replace (q, gbest, pbest(h));
13: for each individual do
14: updateLBest (lbest(h));
15: end
16: end
17: for each sub p(h) do
18: for each individual do
19: updateLBest (lbest(h));
20: end
21: end
22: Adjust parameters by self-adaptive strategy;
23: gen(h) ← gen(h +1);
24: end
Figure 4: Pseudo code of Hybrid CEA algorithm.
5.3 Numerical Experiments by HCEA
To verify the superiority of the proposed hybrid
cooperational coevolution algorithm (hCEA) in
minimizing the maximum fuzzy makespan, an
existing set of instances and a generated set of
instances are adopted in this paper as numerical
experiments (Sun, et al 2019). The scale varies from
small scale with 40 operations to large scale with 293
SDMIS 2021 - Special Session on Super Distributed and Multi-agent Intelligent Systems
570
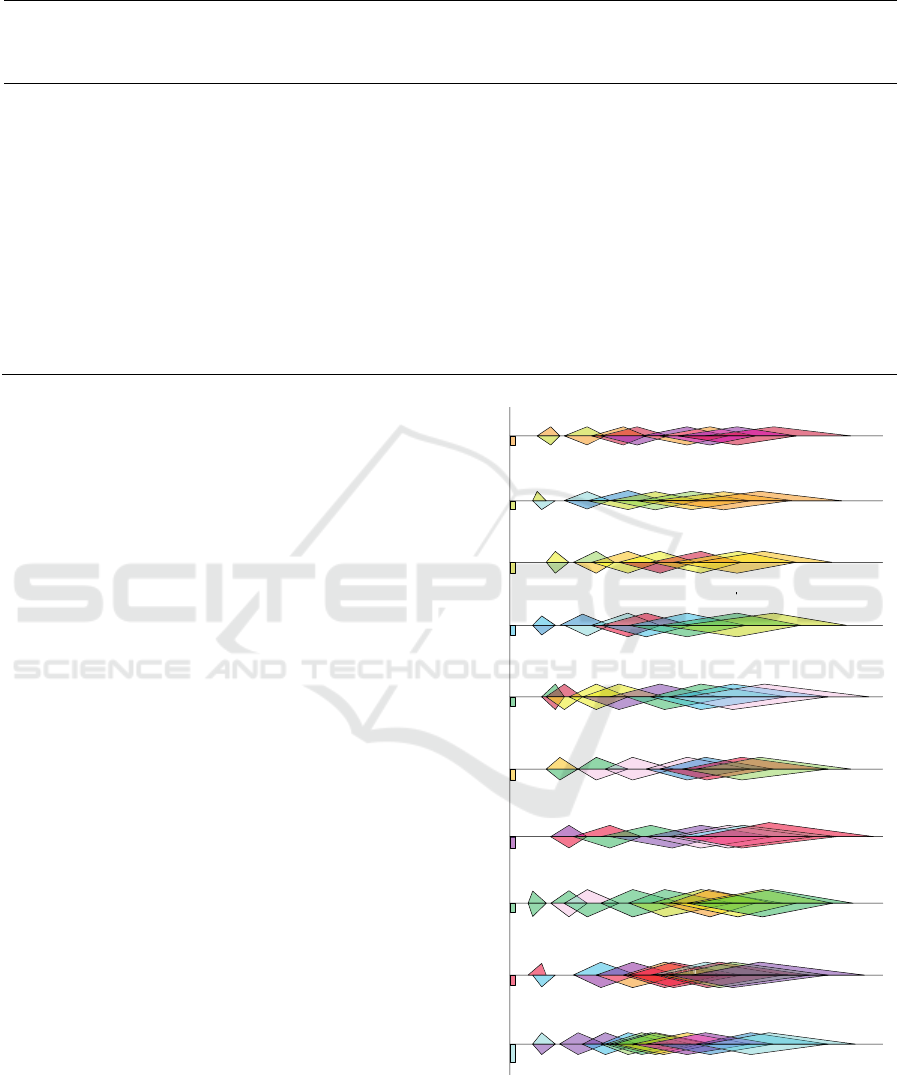
Table 4: Performance of our HCEA Comparing with the State-of-the-Arts for the Standard FJSP.
Instance Mk01 Mk02 Mk03 Mk04 Mk05 Mk06 Mk07 Mk08 Mk09 Mk10
JobNum 10 10 15 15 15 10 20 20 20 20
MacNum 6 6 8 8 4 15 5 10 10 10
(LB,UB) (36,42) (24,32) (204,311) (48,81) (168,186) (33,86) (133,157) 523 (209,369) (165,296)
GA 42 32 212 73 185 74 154 523 321 254
GA+LS 40 27 204 66 176 65 144 523 307 208
PSO 42 32 213 74 184 73 155 523 314 245
PSO+LS 40 27 204 64 174 64 143 523 307 207
DE 42 32 210 73 184 76 153 523 316 251
DE+LS 40 27 204 64 175 65 143 523 307 206
HA 40 27 204 60 173 60 140 523 307 203
HHS/LNS 40 27 204 60 172 59 139 523 307 202
HPSO 40 27 204 60 173 59 139 523 307 202
HGA 40 26 204 61 173 59 139 523 307 202
MOGA 40 27 204 60 173 59 139 523 307 201
MAPSO 40 27 207 65 172 61 156 523 307 212
CCGP 40 26 204 61 172 60 140 523 307 202
hCEA 40 26 204 60 173 59 140 523 307 200
operations. All experiments are carried out with 30
independent repetitions. Three typical and classical
EAs, i.e., the GA, DE, and PSO, and seven state-of-
the-art algorithms, i.e., a hybrid GA (HA), hybrid
PSO (HPSO), hybrid harmony search and large-
neighborhood search (HHS/LNS), cooperative
coevolution genetic programming based
hyperheuristics (CCGP), a multiobjective GA
(MOGA), a hybrid GA with various crossovers and
mutations (HGA), and multiagent PSO (MAPSO),
are tested and compared. The instances of FJSP
dataset contain two categories, i.e., benchmarks from
Lei’s study (2010, 2012) and generated large-scale
instances based on Ghrayeb (2003).
Figure 5 is optimal solution of Case 5 found by
hCEA. It is the fuzzy Gantt chart of the optimal
solution obtained by hCEA of Case 5 shown. To show
its superiority clearly and directly, we tested our
proposed algorithm and seven state-of-the-art
algorithms on 5 regular fuzzy FJSP instances (Cases
1–5) and large-scale fuzzy instances (F-Mk10 to F-
Mk15) 30 times, and we use ANOVA with a mean
difference level of 0.05. Figure 6 is a boxplot of all
algorithms with defuzzied processing time for Case 5.
We can see our proposed hCEA has better satiability
from Figure 6. the performance of the proposed
hCEA is remarkably better than that of the other state-
of-the-art algorithms for all large-scale instances.
Figure 7 is a convergence of fuzzy makespan of all
algorithms. Table 4 is a performance of hCEA
comparing with otherer methods for F-FJSP in Case
5.
Figure 5: Optimal solution of Case 5 got by hCEA: Case 2,
which exhibits average fuzzy makespan and the worst fuzzy
makespan.
M6
M7
M8
M9
M10
O
41
O
131
O
61
O
112
(5,7,10)
O
121
O
61
O
71
O
41
O
131
O
81
(5,7,10)
O
81
O
112
O
71
O
122
O
122
O
11
O
11
(7,10,12)
O
51
O
51
O
42
(8,12,16)
O
42
O
82
O
82
(12,17,22)
O
113
(12,17,22)
O
113
O
132
O
132
O
43
O
43
(13,19,26)
O
32
(14,19,23)
O
32
O
93
O
93
(16,24,34)
O
12
O
12
O
123
(17,26,34)
O
123
O
23
O
23
(18,26,33)
O
44
(18,26,33)
O
44
O
143
O
143
O
74
O
74
(20,30,40)
O
53
(22,32,42)
O
53
O
13
(24,33,41)
O
13
O
155
(26,34,49)
O
155
O
134
O
134
O
64
(26,39,52)
O
64
O
34
(28,40,53)
O
34
O
45
O
45
(31,42,51)
O
75
O
75
O
145
O
145
O
136
(32,47,62)
O
136
O
105
O
105
(31,42,61)
O
35
(36,50,63)
O
35
O
15
O
15
O
126
(33,50,64)
O
126
(6,9,11) (12,17,21) (18,25,30) (20,28,35) (29,39,48) (33,44,54) (37,50,63) (43,58,75)
(6,9,11) (12,17,21) (18,25,30) (20,28,35) (29,39,48) (33,44,54) (37,50,63)
(5,6,8) (12,17,22)
(17,26,34)
(22,32,42) (28,40,53) (32,47,62) (39,55,73)
(8,10,13) (14,19,23) (18,26,33) (24,33,41) (31,42,51) (36,50,63) (41,56,71)
(8,10,13)
(5,7,10) (11,16,22) (18,26,33) (20,30,40) (26,39,52) (33,50,64) (38,58,74)
(7,10,12) (8,12,16) (13,19,26) (16,24,34) (22,33,46) (31,42,61) (35,49,70) (39,56,79)
(31,42,61)
M5
O
31
O
62
(8,11,15)
O
62
O
102
O
102
(15,19,26)
O
103
O
103
(21,27,36)
O
84
O
84
(30,39,53)
O
25
(33,43,58)
O
25
O
55
O
55
(38,51,70)O
31
(8,11,15) (15,19,26) (21,27,36) (30,39,53) (38,51,70) (41,55,75)(33,43,58)
M4
O
141
O
141
O
22
(9,13,17)
O
22
O
63
(14,22,29)
O
63
O
94
O
94
(22,33,46)
O
104
O
104
(30,42,58)
O
115
(35,48,67)
O
115
O
26
(37,51,72)
O
26
(9,13,17) (14,22,29) (20,31,42) (30,42,58) (35,48,67) (31,41,72) (41,57,80)
M3
O
151
O
151
O
152
O
152
(4,5,8)
O
101
O
101
(9,13,17)
O
153
(12,17,24)
O
153
O
154
(20,27,38)
O
154
O
125
O
125
(26,34,49)
O
135
(33,44,54)
O
135
O
46
O
46
(36,50,53)
O
65
(39,55,71)
O
65
(4,5,8) (9,13,17)(12,17,24) (20,27,38) (26,34,49)(31,42,60) (35,47,58) (40,57,75)(39,55,71)
M2
O
21
O
72
(5,7,10)
O
72
O
142
(14,20,28)
O
142
O
133
(19,27,38)
O
133
(26,36,51)
O
24
O
24
(25,34,47)
(
26
36
O
114
O
114
(26,36,51)
(
26
,
36
51
)
)
O
14
O
14
(31,43,61)
,
36
,
51
)
O
54
O
54
(33,46,66)
O
95
(35,49,70)
O
95
(4,7,8) (14,20,28) (19,27,37) (25,34,47)
(31,43,61) (35,49,70) (33,46,66) (40,55,78)
O
21
(26,36,51)
M1
O
111
O
111
O
91
(5,7,10)
O
91
O
92
O
92
(11,15,21)
O
73
O
73
(16,21,28)
O
52
(20,26,36)
O
83
(21,29,40)
O
33
(23,34,45)(14,22,29)
O
144
(27,39,53)
O
85
(33,43, 58)
O
116
(41,53,70)
O
124
O
52
O
83
O
33
O
144
O
85
O
116
O
124
(5,7,10) (11,15,21) (16,21,28) (20,26,36) (21,29,40)
(33,43,58)
(27,39,53)
(23,34,45)(22,31,44) (43,57,76)
(41,53,70)
Advances in Hybrid Evolutionary Algorithms for Fuzzy Flexible Job-shop Scheduling: State-of-the-Art Survey
571
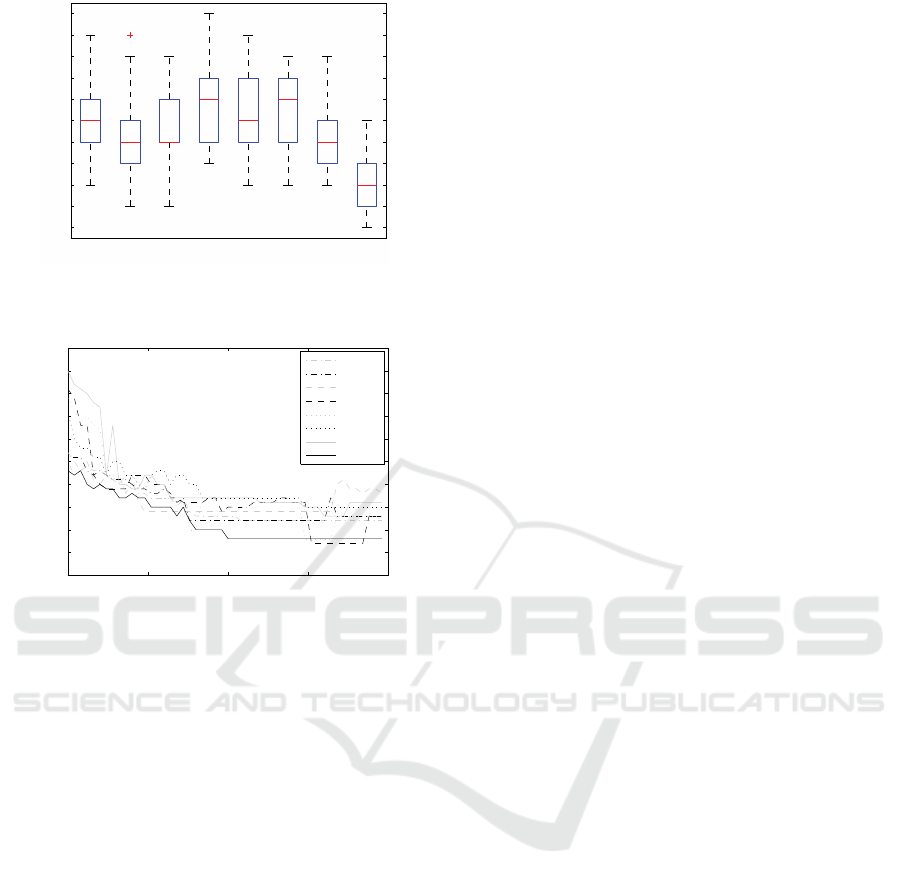
Figure 6: Boxplot of all algorithms with defuzzied
processing time: The boxplot for Case 5.
Figure 7: Convergence of fuzzy makespan of all algorithms.
6 CONCLUSIONS
Flexible job shop scheduling problem (FJSP), is one
of important issues in the integration of real-world
applications. The traditional FJSP always assumes
that the processing time of each operation is fixed
value and given in advance. However, the stochastic
factors in the real-world applications cannot be
ignored, especially for the processing times. In this
paper, we briefly reviewed variant FJSP models such
as multi-objective FJSP, FJSP-SDST, distributed and
FJSP and a fuzzy FJSP models. In particular, we
surveyed a recent advance in hybrid GA with PSO
and Cauchy distribution (HGA+PSO) for F-FJSP and
hybrid cooperative co-evolution algorithm with PSO
& Cauchy distribution (hCEA) for large-scale FJSP.
We lastly demonstrated the performances by the
HGA+PSO and hCEA show that better than the
existing methods from the literature, respectively. As
a future research direction, it should be applied hybrid
cooperative co-evolution algorithms to various real-
world practical problems in manufacturing and
logistics with the stochastic factors or interval data.
ACKNOWLEDGEMENTS
This work is partly supported by Grant-in-Aid for
Scientific Res. (C) of Japan Society of Promotion of
Science. (JSPS: No. 19K12148), the National Natural
Science Foundation of China under Grant 62076053.
The authors would like to thank to the anonymous
reviewers for their valuable comments.
REFERENCES
Palacios, J.J., I. Gonzlez-Rodrłguez, C.R. Vela, J. Puente,
2015. Coevolutionary makespan optimisation through
different ranking methods for the fuzzy flexible job
shop. Fuzzy Sets. Syst., 278, 81–97.
Pinedo, M.L., 2016. Scheduling: Theory, Algorithms, and
Systems. New York, NY, USA: Springer.
Garey, M.R., D.S. Johnson, R. Sethi, 1976. The complexity
of flow shop and job shop scheduling. Math. Oper. Res.,
1(2),117–129.
Brucker, P., R. Schlie, 1990. Job-shop scheduling with
multi-purpose machines. Computing, 45(4), 369–375.
Behnamian, J., 2016. Survey on fuzzy shop scheduling.
Fuzzy Optim. Decis. Making, 15(3), 331–366.
Guiffrida, A.L., R. Nagi, 1998. Fuzzy set theory
applications in production management research: A
literature survey. J. Intell. Manuf., 9(1), 39–56.
Jain, A.S., S. Meeran, 1998. Deterministic job-shop
scheduling: past, present and future. Eur. J. Oper. Res.,
113 (2), 390–434,
Gen, M., Y. Tsujimura, E. Kubota. 1994. Solving job-shop
scheduling problem using genetic algorithms. Proc.
IEEE Int. Conf. on Systems, Man, & Cyber., 1577-1582.
Kacem, I., S. Hammadi, and P. Borne. 2002a. Approach by
localization and multiobjective evolutionary
optimization for flexible job-shop scheduling problems.
IEEE Trans. on Systems, Man and Cyber., Part C, 32,
408-419.
Chamnanlor, C., K. Sethanan, C-F Chien, M. Gen, 2014.
Re-entrant flow shop scheduling problem with time
windows using hybrid genetic algorithm based on
autotuning strategy, Inter. J. Production Res., 52(9),
2612-1629.
Sangsawang, C., K. Sethanan, T. Fujimoto, M. Gen, 2015:
Metaheuristics optimization approaches for two-stage
reentrant flexible flow shop with blocking. Expert Sys.
with Appl., 42, 2395–2410.
Cheng R., M. Gen, Y. Tsujimura, 1996. A tutorial survey
of job-shop scheduling problems using genetic
algorithms: part I. Representation. Computers &
Industrial Eng., 30(4), 983–997.
Cheng R., M. Gen, Y. Tsujimura, 1999. A tutorial survey
of job-shop scheduling problems using genetic
algorithms: part II. Hybrid genetic search strategies.
Computers & Industrial Eng., 36(2), 343–364.
Gen, M., R. Cheng, 2000: Genetic Algorithms and
Engineering Optimization, John Wiley & Sons.
34
35
36
37
38
39
40
41
42
43
44
HA HPSO HHS/LNS HGA MOGA MAPSO CCGP hCEA
Algorithms
Makespan
0 500 1000 1500 2000
50
55
60
65
70
75
80
85
90
95
100
Iteration
Lei’s Ranking Criterion 2
HA
HPSO
HHS/LNS
HGA
MOGA
MAPSO
CCGP
hCEA
SDMIS 2021 - Special Session on Super Distributed and Multi-agent Intelligent Systems
572

Wang, X., L. Gao, C. Zhang, X. Li, 2012. A multi-objective
genetic algorithm for fuzzy flexible job-shop scheduling
problem. Int. J. Comp. Appl. Technol., 45, pp. 115–125.
Gen, M., R. Cheng, L. Lin, 2008. Network Models and
Optimization: Multiple Objective Genetic Algorithm
Approach", Springer, London.
Gao, J., M. Gen, and L. Sun, 2006. Scheduling jobs and
maintenances in flexible job shop with a hybrid genetic
algorithm. J. Intel. Manuf., 17, 493–507.
Gao, J., L. Sun and M. Gen, 2008. A hybrid genetic and
variable neighborhood descent algorithm for flexible
job shop scheduling problems. Computers &
Operations Res., 35, 2892-2907.
Gen, M., J. Gao, L. Lin, 2009. Multistage-based genetic
algorithm for flexible job-shop scheduling problem. in
Intelligent and Evolutionary Systems 187, Springer,
183–196.
Gao, J., M. Gen, L. Sun and X. Zhao, 2007. A hybrid of
genetic algorithm and bottleneck shifting for
multiobjective flexible job shop scheduling problems,
Computers & Industrial Engineering, 53, 149-162.
Yu, X.J. and M. Gen, 2010: Introduction to Evolutionary
Algorithms, Springer, London.
Azzouz, A., M. Ennigrou and L.B. Said, 2016. Flexible job-
shop scheduling problem with sequence-dependent
setup times using genetic algorithm. Proc. The 18th
Inter. Conf. Enterprise Information Sys., 2:47-53.
Gong, X., Q. Deng, G. Gong, W. Liu, 2018: A memetic
algorithm for multi-objective flexible job-shop problem
with worker flexibility, Inter. J. Production Res., 56(7):
2506-2522.
Chou,, C-W, C-F Chien, M. Gen, 2014. A multiobjective
hybrid genetic algorithm for TFT-LCD module
assembly scheduling. IEEE Trans. Autom. Sci. Eng.,
11(3), 692–705.
Lin, L. and M. Gen, 2018. Hybrid evolutionary
optimization with learning for production scheduling:
state-of-the-art survey on algorithms and applications,
Int. J. of Production Research, 56(1-2): 193–223
Liu, T-K, Y-P Chen and J-H Chou, 2014. Solving
distributed flexible job-shop scheduling problem for a
real-world fastener manufacturer, IEEE Access, 2:1598-
1606.
Lu, P-H, M-C Wu, H. Tan, Y-H Peng and C-F Chen, 2018.
A genetic algorithm embedded with a concise
chromosome representation for distributed and flexible
job-shop scheduling problem, J. Intelligent Manuf.,
29:19-34.
Gao, K., Z. Cao, L. Zhang, Z. Chen, 2019. A review on
swarm intelligence and evolutionary algorithms for
solving flexible job shop scheduling problems,
IEEE/CAA J. Automatica Sinica, 6(4):904-916.
Gu, X., M. Huang, X Liang, 2019. An improved genetic
algorithm with adaptive variable neighborhood search
for FJSP. Algorithms, 12, 243, 1-16.
Hao X.C., L. Lin, M. Gen, C-F Chien, 2014. An effective
Markov network based EDA for flexible job-shop
scheduling problem under uncertainty. Proc. IEEE
Conf. on Automation Science & Eng., 131-136.
Sun, L., L. Lin, H. Li, M. Gen, 2019. Cooperative Co-
Evolution algorithm with an MRF-based decomposition
strategy for stochastic flexible job shop scheduling.
Mathematics, 7, 318, 1-20.
Wang, H-K, C-F Chien, M. Gen, 2015. An algorithm of
multi-subpopulation parameters with hybrid estimation
of distribution for semiconductor scheduling with
constrained waiting time. IEEE Trans. Semicond.
Manuf., 28(3), 353–366.
Jamrus, T., C-F Chien, M. Gen, K. Sethanan, 2018. Hybrid
particle swarm optimization combined with genetic
operators for flexible job-shop scheduling under
uncertain processing time for semiconductor
manufacturing. IEEE Trans. on Semicon. Manuf., 31(1),
32-41.
Kennedy, J., 199. The particle swarm: Social adaptation of
knowledge,” in roc. IEEE Int. Conf. Evol. Comput.,
Indianapolis, IN, USA, 303–308.
Kennedy, J., R. Eberhart, 1995. Particle swarm
optimization,” in Proc. IEEE Int. Conf. Neural Network,
Perth, WA, Australia, 39–43.
Jia, S., Z-H Hu, 2014. Path-relinking Tabu search for the
multi-objective flexible job shop scheduling problem.
Comput. Oper. Res., 47, 11–26.
Ouelhadj, D., S. Petrovic, 2009. A survey of dynamic
scheduling in manufacturing systems. J. Scheduling,
12(4), 417–431.
Wang, Y., H. Liu, F. Wei, T. Zong, X. Li, 2018.
Cooperative coevolution with formula-based variable
grouping for large-scale global optimization. Evol.
Comput., 26, 569–596.
Li, X., X. Yao, 2012. Cooperatively coevolving particle
swarms for large scale optimization. IEEE Trans. Evol.
Comput., 16(2), 210–224.
Hao, X.C., M. Gen, L. Lin and G. Suer, 2017. Bi-criteria
stochastic job-shop scheduling problem. J. Intelligent
Manuf., 28:833–845.
Lu, P-H, M-C Wu, H. Tan, Y-H Peng and C-F Chen, 2018.
A genetic algorithm embedded with a concise
chromosome representation for distributed and flexible
job-shop scheduling problem, J. Intel. Manuf., 29:19-34.
Sun, L., L. Lin, M. Gen, H. Li, 2019. A hybrid cooperative
coevolution algorithm for fuzzy flexible job shop
scheduling. IEEE Trans. on Fuzzy Sys., 27(5): 1008-
1022.
Lin, J., L. Zhu, Z.J. Wang, 2019: A hybrid multi-verse
optimization for the fuzzy flexible job-shop scheduling
problem, Computers & Indus. Eng., 127: 1089-1100.
Gao, D., G.G. Wang, W. Pedrycz, 2020: Solving fuzzy job-
shop scheduling problem using DE algorithm improved
by a selection mechanism, IEEE Trans. on Fuzzy
Systems, 28(12)3265-
Shi, D.L., B.B. Zhang, Y. Li, 2020: A multi-objective
flexible job-shop scheduling model based on fuzzy
theory and immune genetic algorithm, Int. J. Simulation
Modelling, 19(1): 123-133.
Zhu, Z.W., X.H. Zhou, 2020: Flexible job-shop scheduling
problem with job precedence constraints and interval
grey processing time, Comp. & Indus. Eng., 149:
106781.
Advances in Hybrid Evolutionary Algorithms for Fuzzy Flexible Job-shop Scheduling: State-of-the-Art Survey
573
