
Fast Human Activity Recognition
Shane Reid
1
, Sonya Coleman
1
, Dermot Kerr
1
, Philip Vance
1
and Siobhan O’Neill
2
1
School of Computing, Engineering and Intelligent Systems, Ulster University Magee Campus,
Derry/Londonderry, Northern Ireland
2
School of Psychology, Ulster University Coleraine Campus, Coleraine, Northern Ireland
Keywords: Social Signal Processing, Activity Recognition, MLP, Key Points, Feature Extraction.
Abstract: Human activity recognition has been an open problem in computer vision for almost two decades. In that time
there have been many approaches proposed to solve this problem, but very few have managed to solve it in a
way that is sufficiently computationally efficient for real time applications. Recently this has changed, with
keypoint based methods demonstrating a high degree of accuracy with low computational cost. These
approaches take a given image and return a set of joint locations for each individual within an image. In order
to achieve real time performance, a sparse representation of these features over a given time frame is required
for classification. Previous methods have achieved this by using a reduced number of keypoints, but this
approach gives a less robust representation of the individual’s body pose and may limit the types of activity
that can be detected. We present a novel method for reducing the size of the feature set, by calculating the
Euclidian distance and the direction of keypoint changes across a number of frames. This allows for a
meaningful representation of the individuals movements over time. We show that this method achieves
accuracy on par with current state of the art methods, while demonstrating real time performance.
1 INTRODUCTION
Human activity recognition, defined as the challenge
of classifying an individual’s activity from a video, is
one of the oldest problems in the field of video
processing, having been studied for almost two
decades. In that time there has been a number of
proposed approaches to solving this problem, with the
majority based on either spatio-temporal features
(Dollar et al., 2005; Laptev, 2004; Zelnik-Manor &
Irani, 2001), optical flow (Efros et al., 2003; Guo et
al., 2010; Ke et al., 2005; Schüldt et al., 2004; Wang
et al., 2011) or deep learning (D’Sa & Prasad, 2019;
Lee & Lee, 2019; Sheeba & Murugan, 2019; Subedar
et al., 2019). These methods have been shown to
achieve high accuracy on common benchmark
datasets but come with a significant computational
cost. As such, their use for real time applications is
limited.
Feature extraction is an approach to reduce
computational cost in image and video processing, for
example, by compressing an image into a sparse set of
interest points (Camarena et al., 2019). Early attempts
to do this used general interest point detectors such as
SIFT and SURF. However, these methods had a
number of drawbacks, most notably that there was no
agreed standard for human representation (Sun et al.,
2010). To solve these problems, specialized “key
point” detectors were developed, which can be applied
to an image and a set of locations of key body joints
for each individual within the image is returned. Two
of the most popular approaches are OpenPose (Cao et
al., 2017) and AlphaPose (Xiu et al., 2018).
Recently, (Camarena et al., 2019) presented an
approach for fast human activity recognition, based on
the method used in (Wang et al., 2013). In order to
speed up this approach, they used a reduced feature set
of six keypoints (those for the neck, right wrist, left
elbow, left wrist, mid hip and left ankle), generated
using OpenPose (Cao et al., 2017). In doing so they
reduced the number of features used by approximately
a factor of 5 and achieved an approximate 8 times
improvement in speed over the original method
(Wang et al., 2013), with a reduction in accuracy of
only 1.4%. This enabled the approach to run
sufficiently fast for real time classification, a
breakthrough for human activity recognition. In order
to achieve this speed gain, their approach only
sampled a small number of body keypoints. However,
by doing this, they have a less generalizable
Reid, S., Coleman, S., Kerr, D., Vance, P. and O’Neill, S.
Fast Human Activity Recognition.
DOI: 10.5220/0010420300910098
In Proceedings of the International Conference on Image Processing and Vision Engineering (IMPROVE 2021), pages 91-98
ISBN: 978-989-758-511-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
91

representation of the individuals body pose; this may
limit the type of activity that can be detected. For
example, in a situation where it is necessary to detect
whether an individual is kicking with their right leg,
this approach would struggle as they have extracted no
keypoints relating to the right leg. In contexts where it
is necessary to detect a large range of different actions,
using a reduced set of keypoints may not be feasible.
Recently the work of (Reid et al., 2020) showed
that by reducing the framerate and sample size used
for keypoint based activity recognition, the
computational cost can be reduced enough to perform
real time activity recognition on upwards of 14
individuals simultaneously. However, this approach
also comes with downsides, the most obvious of
which is that by reducing the sample rate in this way,
it may be difficult to detect actions which are
characterized by rapid movements, such as clapping,
where the movement may be completed between
frames being sampled. Earlier methods for
overcoming this issue using traditional keypoints
involved measuring keypoint trajectories, but these
approaches are limited by the fact that they are unable
to track specific landmarks (e.g elbows, hands etc.)
(Matikainen et al., 2009). Later improvements to such
methods achieved impressive accuracies on a number
of benchmark datasets but were still hampered by poor
run-time performance (Jain et al., 2013). Due the
recent breakthroughs in the area of human landmark
detection, keypoint trajectories are once again coming
into focus as a viable method for human action
recognition (Choutas et al., n.d.; Yi & Wang, 2018).
In this paper we present a keypoint trajectories
based approach that builds on the approach of (Reid et
al., 2020), where the set of key points for an
individual, extracted over a given time period, are
converted into a feature set of “keypoint changes”.
These keypoint changes encode a history of the
Euclidian distance and the direction of keypoint
movement, measured over time. We measure the
keypoint changes using a reduced sample rate and
reduced sample size, but we also measure the short
term keypoint changes between concurrent frames. In
this way we still maintain a sparse approach of (Reid
et al., 2020) but are also able to detect actions which
are characterised by rapid movements.
The remainder of the paper is organized as
follows. In Section 2 we outline the proposed
approach, and the experimental design. In Section 3
we present the performance evaluation results and
discussion. In Section 4 we compare the results with
other state-of-the-art methods. Finally, in Section 5 we
conclude the paper and discuss possible future work.
2 METHODOLOGY
This section will describe the proposed keypoint
based approach for fast human activity recognition
based on the history of keypoint changes over time in
terms of the Euclidian distance and direction. We use
OpenPose for keypoint extraction (Cao et al., 2017)
as it provides a high level of accuracy with very low
computational cost that remains constant when more
individuals are detected, unlike with other methods
such as AlphaPose (Xiu et al., 2018).
For each individual within an image OpenPose
extracts a set of 25 body keypoints. This method
works by first using a feedforward neural network to
predict a set of 2D confidence maps of body part
locations and a set of 2D vector fields of part affinity
fields (PAFs) which encode the degree of association
between parts. Then these confidence maps and the
PAFs are parsed by a greedy inference method to
output the 2D keypoints for all people in the image.
For more details on the model architecture please see
(Cao et al., 2017).
It is worth noting, however, that the novel
contributions of this paper are not reliant on any
specific keypoint estimation approach and can be
implemented with any methods, such as AlphaPose
(Xiu et al., 2018), Megvii (Cai et al., 2019), or similar
techniques. Regardless of the method used for
keypoint extraction, each keypoint is defined as:
𝑘
=
𝑥
,𝑦
(1)
where 𝑥
and 𝑦
are the image coordinates of the
extracted keypoint. We define the Euclidian distance
between two keypoints 𝑘
𝑖
and 𝑘
𝑗
as:
∆
𝑘
𝑖
,𝑘
𝑗
=
𝑥
𝑖
−𝑥
𝑗
2
+
𝑦
𝑖
−𝑦
𝑗
2
(2)
and the angle between them as:
𝜃
𝑘
𝑖
,𝑘
𝑗
=𝑎𝑡𝑎𝑛2
𝑦
𝑖
−𝑦
𝑗
𝑥
𝑖
−𝑥
𝑗
(3)
where atan2 is the function which returns the
unambiguous angle θ between the two keypoints on
the Euclidian plane. We can then define the keypoint
change between these two keypoints as:
𝑐𝑘
,
𝑘
=∆𝑘
,𝑘
,𝜃𝑘
,𝑘
(4)
For two sets of keypoints L and M extracted for an
individual at time t and t-λ defined as:
𝐿
=𝑙
,𝑙
,𝑙
…𝑙
(5)
𝑀
=𝑚
,𝑚
,𝑚
…,𝑚
(6)
IMPROVE 2021 - International Conference on Image Processing and Vision Engineering
92
where 𝜆 is the time difference in seconds and 𝛾 is the
number of keypoints that are extracted (as we are
using OpenPose the value for 𝛾 used is 25). The set
of keypoint changes between L and M are calculated
as:
𝐶
𝐿
,𝑀
=𝑐
𝑙
,𝑚
,𝑐
𝑙
,𝑚
,𝑐
𝑙
,𝑚
,…𝑐𝑙
,𝑚
(
7)
To compute the coarse representation of the
individual’s movement (in our experiments this was
done using a 0.2s time period) we calculate 15 such
sets of keypoint changes in order to build up a
temporal history. The final feature vector at time t is
defined as:
𝐶𝑜𝑎𝑟𝑠𝑒
=
𝐶
𝐿
,𝑀
,𝐶
𝐿
,𝑀
,…𝐶
𝐿
,𝑀
(8)
To compute the fine-grained representation of an
individual’s movement, again a set of 15 such
keypoint changes is used in order to build up a
temporal history of the individuals movement over
time. This feature vector is defined as:
𝐹𝑖𝑛𝑒
=
𝐶
𝐿
,𝑀
,𝐶
𝐿
,𝑀
,…𝐶
𝐿
,𝑀
(
9)
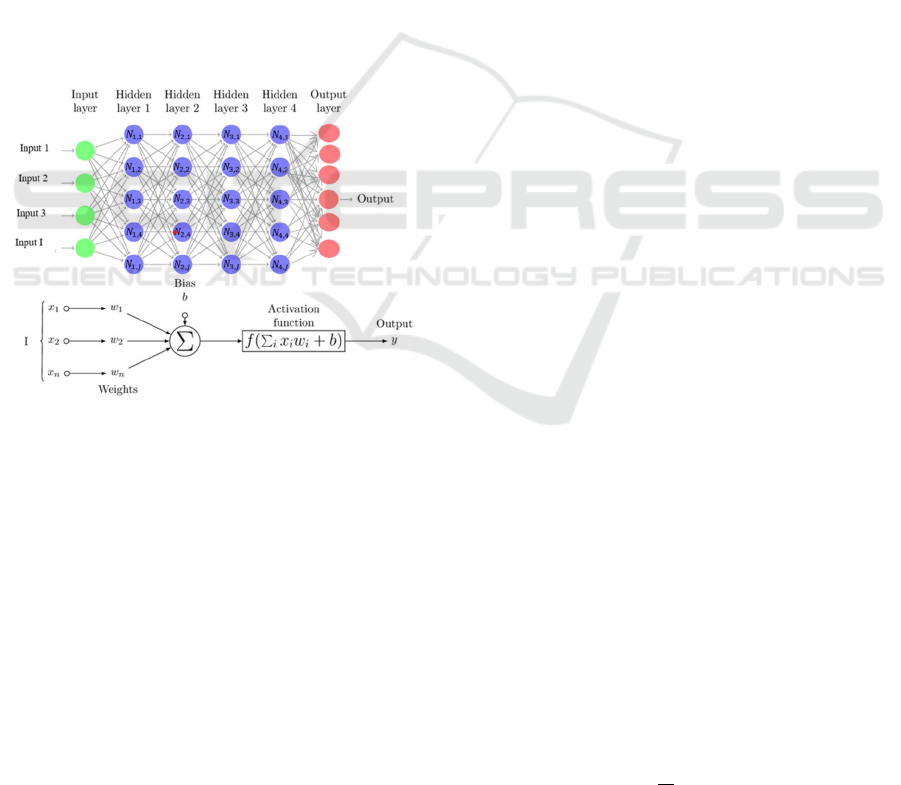
Figure 1: Graph representation of an MLP. The weights are
represented by the edges of the graph.
where 𝜀 is defined as a short time period such that 𝜀
𝜆 (in our experiments the value for 𝜆 was 0.2 seconds
and the value for 𝜀 was 0.04 seconds).
For the combined approach, the feature vector is
simply defined as:
𝐶𝑜𝑚𝑏𝑖𝑛𝑒𝑑
=
𝐶𝑜𝑎𝑟𝑠𝑒
,𝐹𝑖𝑛𝑒
(10)
These features were subsequently used to train a
multi-layer perceptron for classification.
Multilayer perceptron (MLP) refers to a
feedforward artificial neural network. Arguably one
of the simplest forms of an artificial neural network,
an MLP consists of at least three layers of neurons, an
input layer, a hidden layer and an output layer. Based
on the biological neural networks that make up the
brain (Minsky & Papert, 1988), MLPs are one of the
oldest methods for supervised machine learning.
Despite this they are still used for a large number of
problems, and serve as a foundation for deep learning
(Lin, Liang, 2020).
Figure 1 shows a simple graph representation of the
MLP algorithm, which can be briefly described at
follows. For an input vector of length I feeding into
a hidden layer of J neurons, we define a set of weights
𝑤
,
, where 𝑗 refers to the neuron in question and 𝑖
refers to the neuron in the previous layer to which j is
connected. Formally for input vector X defined as:
𝑋=
𝑥:𝑥 ∈
ℝ
(11)
The weights W with J rows and I columns can be
defined as:
𝑊=
𝑤:𝑤∈
ℝ
(12)
and the set of biases B defined as:
𝐵=
𝑏:𝑏∈
ℝ
(13)
The net inputs to a given neuron j are then calculated
as the sum of the inputs multiplied by their respective
weights plus the bias value:
𝑛𝑒𝑡
𝑗
=𝑥
.𝑤
+𝑏
(14)
The net output is then calculated using an activation
function F. In this paper we use a rectified linear
activation function defined as:
𝐹
𝑥
=max
0,𝑥
(15)
Therefore, the output for a given neuron j can be
expressed as:
𝑦
=𝐹𝑛𝑒𝑡
𝑗
(16)
For a network with more than one hidden layer, the
output from the previous layer is used as the input for
the next layer. Thus, each hidden layer has its own set
of biases and weights. The final layer of the network
is the output layer and outputs the prediction of the
network. A SoftMax activation function was used on
the final layer to determine the prediction.
In order to train the network, the weights and
biases are updated via backpropagation, using a
stochastic gradient decent optimizer in order to
minimize the network loss function. In this paper we
use a sparse categorical cross entropy loss function
defined as:
𝐶𝐶𝐸
𝑦,𝑦
=−
1
𝑁
𝑦
∙𝐿𝑜𝑔𝑦
(17)
Fast Human Activity Recognition
93
where N is the number of elements in the training set,
𝑦 is the ground truth, 𝑦 is the estimate, log is the
natural log and ∙ is the inner product. The network is
trained over a maximum of 500 epochs, with early
stopping used to prevent overfitting.
3 EXPERIMENTAL SETUP
For the first experiment, a coarse representation of the
keypoint changes was used, as defined in equation 8.
The value used for λ was 0.2 seconds. This results in
an overall temporal history of 3 seconds, and the
resulting feature vector with 750 features.
For the second experiment, the fine-grained
representation defined in equation 9 was used. The
value used for λ was 0.2 seconds and the value used for
ε was 0.04. This enabled a finer grained representation
of the instantaneous change of the keypoint, while
maintaining a feature vector of 750 features.
For the final experiment, the combined approach
described in equation 10 was used. Again, the value for
λ was 0.2 seconds and the value for ε was 0.04 seconds.
The resulting feature vector contained a total of 1500
features. This enabled a more robust representation of
the keypoint changes over the given time period.
In each of the three experiments, these features
were subsequently used to train an MLP for activity
recognition. The network has four hidden layers,
each containing 450 neurons with a rectified linear
activation function. These parameters were optimized
using a grid search in order to maximize classification
accuracy. As discussed in Section 2, the network was
trained using a stochastic gradient descent optimizer
to minimize a sparse categorical cross entropy loss
function.
For our experiments, the data were split using
leave-one-out cross validation as recommended by
(Gao, Z., Chen, M. Y., Hauptmann, A. G., & Cai,
2010), where the set of videos for one individual is
used for testing and the rest are used for training. The
task therefore is to classify the activity exhibited by
an unknown individual. The model was trained over
a maximum of 500 epochs. In order to prevent
overfitting, early stopping was used if the training
accuracy failed to increase after 10 epochs.
4 ACCURACY EVALUATION
We evaluated the approaches on two simple but well-
known datasets, the KTH dataset (Schüldt et al.,
2004) and Weizmann dataset (Gorelick et al., 2007).
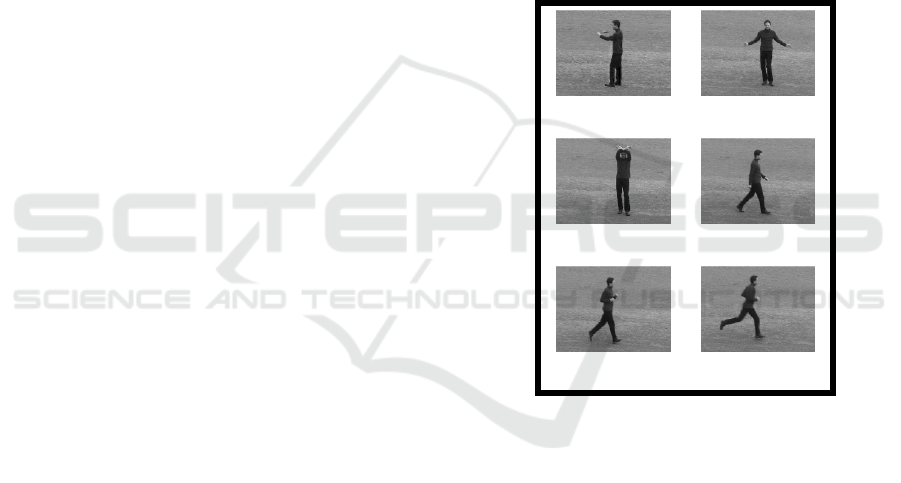
The KTH dataset contains short video clips of 6
distinct actions: Walking, Jogging, Running, Boxing,
Clapping and Waving. For each activity there are 25
sets of videos each containing a different individual.
Each video set contains 4 videos, each with a different
background: outdoors, outdoors with a different
scale, outdoors with different clothes and indoors.
This results in a total of 600 video clips, with an
average length of 4 seconds, recorded at a rate of
25fps. The videos have a resolution of 160x120
pixels. Figure 2 shows example frames from the
dataset. The results were validated using “leave one
out” cross validation, where 24 of the video sets were
used for training and one set was used for testing. The
OpenPose library (Cao et al., 2017) was used for
keypoint extraction as it provides a high degree of
accuracy with real time performance.
Boxing Clapping
Waving Walking
Jogging Running
Figure 2: Example frames of the six activities from the KTH
dataset.
The confusion matrix for the first experiment
(coarse approach), where the keypoint changes were
each calculated over a time period of 0.2 seconds, is
presented in Table 1. These results show that this
approach achieves a classification accuracy of > 93%
for four of the six activities. The average accuracy
across all activities for this approach was 92.7%. The
approach did struggle to differentiate between the
jogging and running activities as these activities
appear to be quite similar. However, this proposed
approach was still able to separate these two classes
with over 70% accuracy.
The results for the second experiment (fine
grained), where the keypoint changes were calculated
over a 0.04 second time period, are presented in Table
2. As can be seen from Table 2, the accuracy of the
IMPROVE 2021 - International Conference on Image Processing and Vision Engineering
94
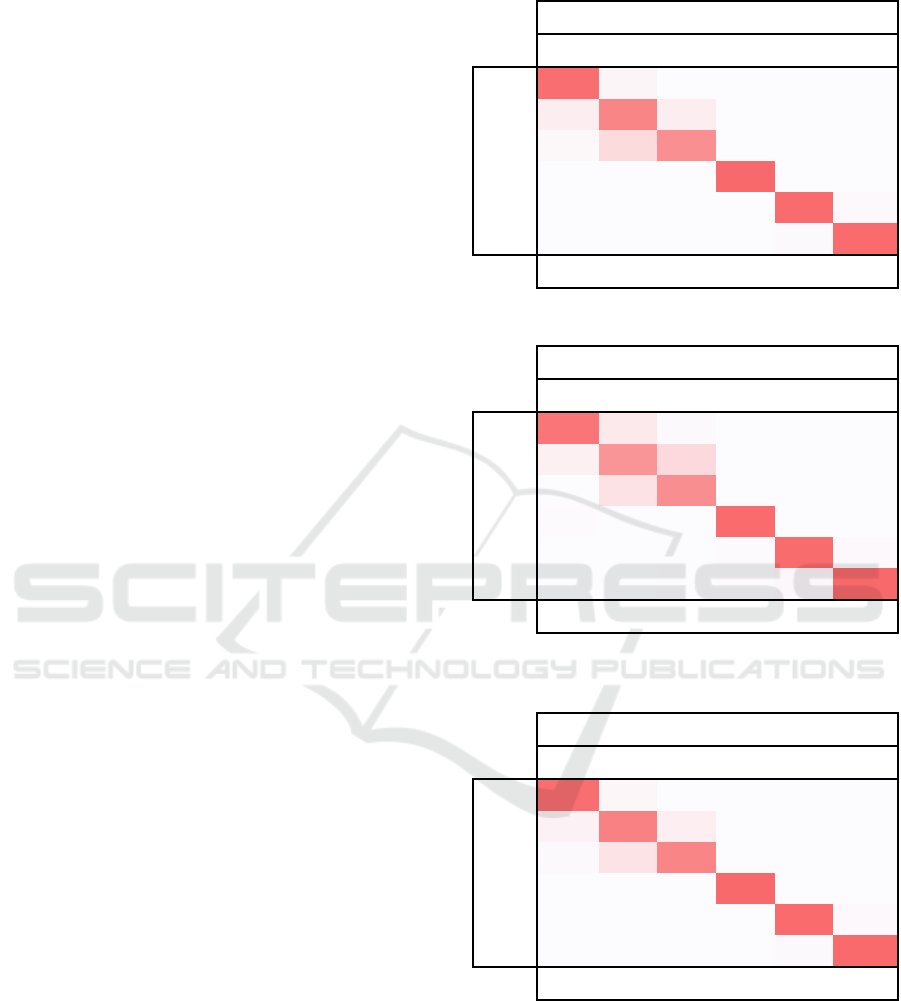
approach decreased when the changes were
calculated over this shorter time period and the
approach again struggled to differentiate between the
running and jogging activities. However, the
accuracy of the three non-locomotion activities
(Boxing, Clapping and Waving), while lower than the
coarse 0.2 second approach, remained over 93%. The
average accuracy of this approach was 89.8%, a
reduction of ~3% compared to the coarse approach in
table 1. We postulate that this slight reduction in
accuracy may be due to the fine grain keypoint
changes not encoding as much temporal information
about the movement as the coarse representation.
Results for the third experiment (combined
approach) where the keypoint changes were
calculated over both a 0.2 second time period and
0.04 seconds are presented in Table 3. These results
show that using both sets of keypoint changes
resulted in an increase in classification accuracy for
all six classes. The classification accuracy for the
three non-locomotive classes is now over 96%.
Additionally, the accuracies for the three
locomotive activities are all over 80%. It is still
difficult to differentiate between the jogging and
running classes. However, this combined approach is
more accurate than both the coarse and fine grained
approaches individually. The average accuracy for
this approach was 94.2%. This is an increase of
~1.6% over the coarse approach, and ~4.6% over the
fine-grained approach.
It is worth noting that the approach of (Reid et al.,
2020) achieved a total accuracy of 90.2% on this
dataset. Our coarse approach detailed above
outperforms their method by >2% and the combined
approach improves upon that by ~4%, while still
using a reduced sample rate for action recognition.
To demonstrate that our proposed approach is not
dataset dependent, we also evaluated it using the
Weizmann dataset (Gorelick et al., 2007). This
dataset contains short video clips of 9 distinct actions:
walking, running, jumping, stepping sideways,
bending, waving with one hand, waving with two
hands, jumping in place, jumping jack and skipping.
For each activity there are 10 sets of videos, each
containing a different individual. This results in a
dataset of 90 videos, recorded at a rate of 50fps
interlaced. The videos had a resolution of 180 x 144
pixels. Again, “leave one out” cross validation was
used to verify the results, with one set used for testing
and nine sets used for training.
The results from the first experiment (coarse
approach), where the keypoint change was measured
over 0.2 seconds are presented in Table 4. As can be
seen, the accuracy of the approach for the Weizman
Table 1: Coarse Approach.
Coarse Approach
Walk Jog Run Box Clap Wave
Walk 94.0 4.7 0.57 0.45 0.18 0.11
Jog 10.5 78.7 10.1 0.41 0.12 0.14
Run 4.02 22.4 72.8 0.35 0.17 0.18
Box 1.23 0.23 0.12 96.8 1.14 0.52
Clap 0.83 0.13 0.1 0.83 94.9 3.2
Wave 0.63 0.12 0.08 0.41 2.68 96.1
Total Accuracy 92.7%
Table 2: Fine Grained approach.
Fine Grained approach
Walk Jog Run Box Clap Wave
Walk 87.9 13.0 2.33 0.88 0.36 0.12
Jog 8.05 67.5 22.8 0.34 0.26 0.07
Run 1.25 17.5 72.3 0.24 0.24 0.05
Box 1.62 1.07 0.93 94.8 1.32 1.31
Clap 0.62 0.38 0.74 1.88 93.9 3.02
Wave 0.60 0.58 0.87 1.87 3.89 95.4
Total Accuracy 89.8%
Table 3: The combined approach accuracy results for the
KTH dataset.
Combined approach
Walk Jog Run Box Clap Wave
Walk 94.3 4.49 0.65 0.37 0.12 0.08
Jog 7.61 82.6 9.41 0.29 0.08 0.06
Run 2.44 17.0 80.1 0.31 0.1 0.11
Box 1.1 0.12 0.06 97.4 0.76 0.58
Clap 0.2 0.03 0.02 0.55 96.4 2.81
Wave 0.15 0.02 0.01 0.35 2.34 97.1
Total Accuracy 94.2%
dataset was significantly lower than for the previous
dataset. This may be due to two factors: firstly the size
of the dataset was significantly smaller, only 90
videos as opposed to 600 in the KTH dataset, and
secondly the duration of the videos was much shorter,
averaging ~2 seconds per activity rather than the ~4
seconds for the KTH dataset. This makes it difficult
for our approach to build a complete history of the
keypoint changes for the action. However, the
Fast Human Activity Recognition
95
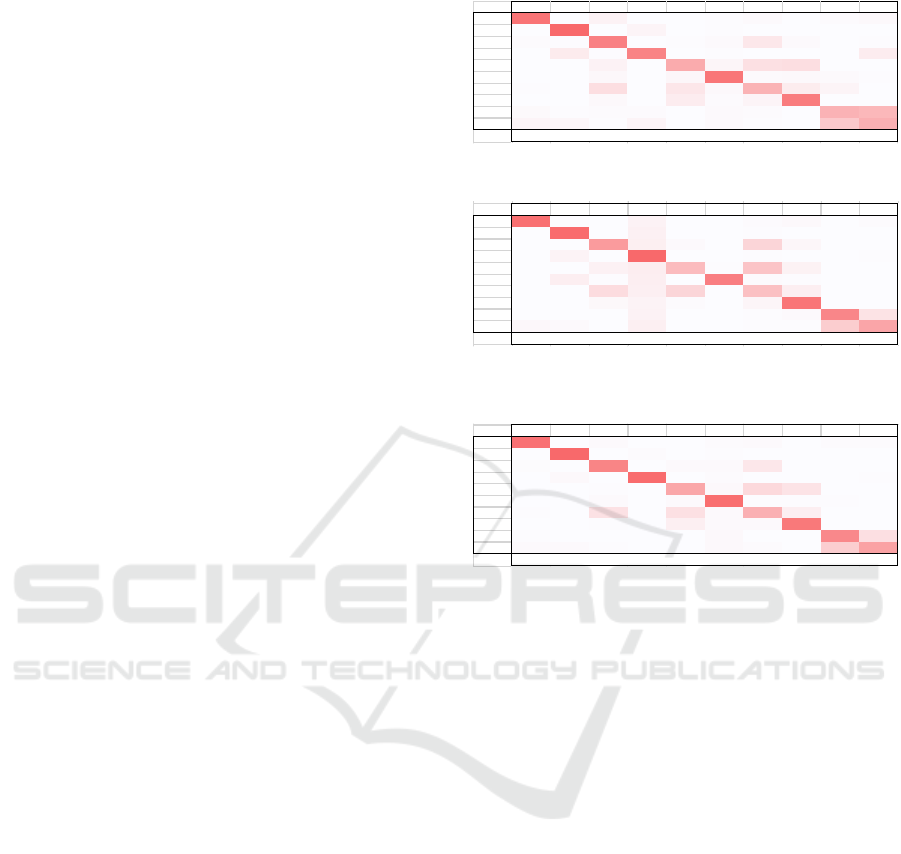
approach still achieved an accuracy of ~70%, with the
majority of classes being classified correctly.
Like the KTH dataset, it was difficult for the
coarse approach differentiate between activities
which were similar in appearance. The two waving
activities, waving with one hand and waving with two
hands, were very similar, with below 50% accuracy
for both activities. Additionally, the three locomotive
activities, skipping, running, and walking had a large
degree of similarity with each other, as with the KTH
dataset. The skipping activity also had a large degree
of similarity to the jumping activity.
The results for the second experiment (fine grained
approach) where the keypoint change was measured
over 0.04 seconds, are presented in Table 5. As can be
seen, the average accuracy of this approach was
approximately 2% higher than for the coarse 0.2
second approach. The confusion between the two hand
waving classes was significantly lower than with the
coarse approach. However, the confusion between the
skipping and running classes was significantly higher.
These results indicate that the effectiveness either
coarse or fine grained keypoint changes depends on the
activities which are being classified.
The results for the third experiments (combined
approach), where the keypoint changes were
calculated over 0.2 seconds (coarse) and 0.04 seconds
(fine) are presented in Table 6. As can be seen, this
approach outperformed both other approaches by a
significant margin. The average classification
accuracy was ~7% higher than the fine-grained
approach, and ~9% more accurate than the coarse
approach. The accuracy for every activity was
significantly higher than for either method
individually. There is still some confusion between
classes which are similar in appearance, with the skip
class having high confusion with both the running and
jumping classes. However, this was significantly
lower than for the other two approaches individually.
These results show that using the combined key
point changes can result in a significant improvement
in classification accuracy while still maintaining a
sparse representation of the video frame. This may be
because certain activities are easily identifiable when
observed over a long period, whereas other activities
are more easily identified over a shorter period. For
example, the two hand waving activities were more
easily identified when keypoint changes are
calculated over a shorter time period, whereas the
locomotion activities were more easily identified over
a larger time period. By calculating the changes over
both short and long time periods, the MLP can more
easily differentiate between both sets of activities,
thus improving the average accuracy.
Table 4: Coarse approach.
Table 5: Fine grained approach.
Table 6: The combined approach accuracy results for the
Weizman dataset.
5 RUNTIME EVALUATION
We computed the computation time of the combined
approach using the Weizmann dataset which consists
of 5701 frames. Experiments were conducted on an
Intel XeonE5-1620 PC running Ubuntu version
18.04.3. The GPU used was a Nvidia Titan Xp with
16GB RAM. This is consistent with other approaches
such as (Camarena et al., 2019) who also used GPU
accelerated hardware when testing the runtime of
their approach. The time taken for the OpenPose
library to compute the key points for the entire set was
227.3 seconds. This is a rate of 39.8ms per frame and
represents the most significant bottleneck of this
approach. The time taken to compute the set of
keypoint changes for the entire dataset is 1.7 seconds;
approximately 0.3ms per frame. Additionally, it takes
the MLP algorithm 1 second to classify the activities
for the test set, which consists of 701 frames.
Therefore, classification is performed at a rate of
1.39ms. The total computation time for the entire
pipeline is 41.5ms per frame; 24.0 frames per second.
The runtime for the KTH dataset was also calculated
and found to be the same. Hence, the approach is fast
enough to perform activity recognition in real time.
Bend Jack Jump P.Jump Run Slide Skip Walk Wave 1 Wave 2
Bend 85.3% 0.3% 6.3% 0.2% 0.2% 0.9% 1.9% 0.3% 1.7% 3.0%
Jack 0.3% 92.0% 0.5% 5.5% 0.0% 1.0% 0.0% 0.0% 0.4% 0.3%
Jump 1.7% 0.7% 77.9% 0.0% 0.7% 2.2% 13.3% 2.4% 0.4% 0.7%
P.Jump 0.0% 11.2% 0.7% 76.4% 0.0% 1.1% 0.0% 0.0% 0.4% 10.2%
Run 0.0% 0.2% 6.6% 0.0% 51.2% 4.4% 18.0% 19.0% 0.2% 0.2%
Slide 0.0% 0.5% 3.6% 0.0% 4.1% 84.0% 2.3% 2.9% 2.0% 0.7%
Skip 1.0% 0.2% 19.2% 0.0% 13.9% 3.1% 46.3% 10.6% 5.3% 0.4%
Walk 0.0% 0.0% 2.7% 0.0% 10.5% 1.8% 5.2% 79.7% 0.1% 0.0%
Wave 1 2.5% 1.2% 1.7% 1.5% 0.0% 2.0% 1.4% 0.5% 46.4% 42.9%
Wave 2 5.4% 3.8% 1.1% 5.1% 0.0% 2.1% 1.1% 0.0% 32.9% 48.4%
Total Accuracy 69.6%
Bend Jack Jump P.Jump Run Slide Skip Walk Wave 1 Wave 2
Bend 86.5% 0.9% 0.0% 6.4% 0.0% 0.2% 1.3% 3.0% 0.5% 1.3%
Jack 0.4% 90.5% 0.0% 7.8% 0.0% 0.1% 0.7% 0.0% 0.0% 0.4%
Jump 0.0% 0.0% 60.9% 8.7% 2.0% 0.0% 24.5% 3.9% 0.0% 0.0%
P.Jump 0.6% 6.1% 0.2% 91.4% 0.0% 0.0% 0.9% 0.0% 0.0% 0.7%
Run 0.0% 0.0% 7.1% 9.8% 40.5% 0.7% 35.1% 6.8% 0.0% 0.0%
Slide 0.0% 8.8% 0.9% 9.0% 0.5% 77.9% 1.8% 1.1% 0.0% 0.0%
Skip 0.0% 0.0% 20.0% 8.2% 24.7% 0.4% 37.6% 9.2% 0.0% 0.0%
Walk 0.1% 0.0% 3.1% 5.6% 1.4% 0.6% 4.7% 84.2% 0.1% 0.1%
Wave 1 0.6% 0.0% 0.0% 6.3% 0.0% 0.6% 0.8% 2.3% 73.4% 16.1%
Wave 2 3.7% 1.9% 0.2% 8.2% 0.0% 0.3% 1.0% 0.8% 29.8% 54.2%
Total Accuracy 71.9%
Bend Jack Jump P.Jump Run Slide Skip Walk Wave 1 Wave 2
Bend 90.1% 0.3% 2.2% 0.0% 0.3% 1.4% 2.3% 0.3% 1.6% 1.4%
Jack 0.3% 95.9% 0.1% 1.6% 0.0% 1.2% 0.0% 0.0% 0.4% 0.4%
Jump 1.3% 0.4% 78.6% 0.2% 2.4% 2.4% 14.0% 0.4% 0.0% 0.2%
P.Jump 0.0% 2.8% 0.2% 94.4% 0.0% 1.7% 0.0% 0.0% 0.0% 0.9%
Run 0.2% 0.0% 0.7% 0.0% 56.1% 3.2% 22.9% 16.6% 0.0% 0.2%
Slide 0.0% 0.2% 2.3% 0.0% 2.3% 92.1% 0.9% 1.1% 0.7% 0.5%
Skip 1.2% 0.0% 17.8% 0.0% 18.6% 2.4% 49.8% 9.6% 0.0% 0.6%
Walk 0.0% 0.0% 1.1% 0.0% 8.9% 2.0% 2.4% 85.6% 0.0% 0.0%
Wave 1 0.8% 0.0% 0.5% 0.2% 0.0% 3.2% 0.5% 0.2% 75.8% 19.0%
Wave 2 2.1% 2.4% 0.8% 0.3% 0.0% 3.2% 1.6% 0.0% 30.6% 59.0%
Total Accuracy 79.0%
IMPROVE 2021 - International Conference on Image Processing and Vision Engineering
96
Table 7 presents comparative results for the
proposed approach and other state of the art
approaches using the KTH dataset. Table 7 shows that
the approach of Wang et al., (Wang et al., 2013)
achieves an accuracy of 95.7%. While this is higher
than the proposed approach, the computational cost of
this method prevents it from running in real time. We
also compare our approach with that in (Reid et al.,
2020) who used a reduced sample rate and sample
size to achieve real time performance using body
keypoints. The proposed approach performs
significantly better, indicating that the use of keypoint
changes is a more robust alternative to simply
reducing the sample rate and sample size while
maintaining the real-time performance.
Table 7: Comparison of approaches on the KTH dataset.
Performance evaluation using the KTH
dataset
Approach Accuracy Speed/FPS
(Wang et al., 2013) 95.7% 3
(Reid et al., 2020) 90.2% 24
Keypoint Changes
94.2% 24
6 CONCLUSION
We have presented a method for human activity
recognition based on calculating the key points
changes (Euclidean distance and angle). We have
shown that this approach achieves accuracy on par
with current state of the art methods, while using a
sparse representation. Further, we have conducted
run-time experiments and shown that this method is
sufficiently fast enough for real time applications. In
future work we will investigate how this approach
performs for multi-person activity recognition and
adapt this approach for more complex activities and
scenes involving one or more people.
REFERENCES
Cai, Y., Wang, Z., Yin, B., Yin, R., Du, A., Luo, Z., Li, Z.,
Zhou, X., Yu, G., Zhou, E., Zhang, X., Wei, Y., & Sun,
J. (2019). Res-steps-net for multi-person pose
estimation. Joint COCO and Mapillary Workshop at
ICCV 2019: COCO Keypoint Challenge Track.
Camarena, F., Chang, L., & Gonzalez-Mendoza, M. (2019).
Improving the dense trajectories approach towards
efficient recognition of simple human activities. 2019
7th International Workshop on Biometrics and
Forensics (IWBF), 1–6.
Cao, Z., Simon, T., Wei, S. E., & Sheikh, Y. (2017).
Realtime multi-person 2D pose estimation using part
affinity fields. IEEE/CVF Conference on Computer
Vision and Pattern Recognition (CVPR), 7291–7299.
Choutas, V., Weinzaepfel, P., Revaud, J., & Schmid, C.
(n.d.). PoTion: Pose MoTion Representation for Action
Recognition.
D’Sa, A. G., & Prasad, B. G. (2019). An IoT Based
Framework For Activity Recognition Using Deep
Learning Technique. In ArXiv Preprint.
http://arxiv.org/abs/1906.07247
Dollar, P., Rabaud, V., Cottrell, G., & Belongie, S. (2005).
Behavior recognition via sparse spatio-temporal
features. 2005 IEEE International Workshop on Visual
Surveillance and Performance Evaluation of Tracking
and Surveillance, 65–72.
Efros, A. A., Berg, A. C., Mori, G., & Malik, J. (2003).
Recognising Action at a distance. Proceedings Ninth
IEEE International Conference on Computer Vision, 2,
726–733. https://doi.org/10.1017/s1358246107000136
Gao, Z., Chen, M. Y., Hauptmann, A. G., & Cai, A. (2010).
Comparing evaluation protocols on the KTH dataset.
International Workshop on Human Behavior
Understanding, 88–100.
Gorelick, L., Blank, M., Shechtman, E., Member, S., Irani,
M., & Basri, R. (2007). Actions as space time shapes.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 29(12), 2247–2253. https://doi.org/
10.1109/TPAMI.2007.70711
Guo, K., Ishwar, P., & Konrad, J. (2010). Action
recognition using sparse representation on covariance
manifolds of optical flow. Proceedings - IEEE
International Conference on Advanced Video and
Signal Based Surveillance, AVSS 2010, 188–195.
https://doi.org/10.1109/AVSS.2010.71
Jain, M., Jégou, H., & Bouthemy, P. (2013). Better
exploiting motion for better action recognition.
https://doi.org/10.1109/CVPR.2013.330
Ke, Y., Sukthankar, R., & Hebert, M. (2005). Efficient
Visual Event Detection Using Volumetric Features.
Tenth IEEE International Conference on Computer
Vision (ICCV’05), 166–173. https://doi.org/10.1109/
CVPR.2007.383137
Laptev, I. (2004). Local Spatio-Temporal Image Features
for Motion Interpretation.
Lee, D. G., & Lee, S. W. (2019). Prediction of partially
observed human activity based on pre-trained deep
representation. Pattern Recognition, 85, 198–206.
https://doi.org/10.1016/j.patcog.2018.08.006
Lin, Liang, et al. (2020). The Foundation and Advances of
Deep Learning. In Human Centric Visual Analysis with
Deep Learning (pp. 3-13.).
Matikainen, P., Hebert, M., & Sukthankar, R. (2009).
Trajectons: Action recognition through the motion
analysis of tracked features. 2009 IEEE 12th
International Conference on Computer Vision
Workshops, ICCV Workshops 2009, 514–521.
https://doi.org/10.1109/ICCVW.2009.5457659
Fast Human Activity Recognition
97

Minsky, M. L., & Papert, S. A. . (1988). Perceptrons:
expanded edition.
Reid, S., Vance, P., Coleman, S., Kerr, D., & O’Neill, S.
(2020). Towards real time activity recognition.
Procedings of the Fourth IEEE International
Conference on Image Processing, Applications and
Systems (IPAS 2020), In Press.
Schüldt, C., Laptev, I., & Caputo, B. (2004). Recognizing
human actions : A local SVM approach. Proceedings of
the 17th International Conference on Pattern
Recognition (ICPR), 3(September 2004), 32–36.
https://doi.org/10.1109/ICPR.2004.1334462
Sheeba, P. T., & Murugan, S. (2019). Fuzzy dragon deep
belief neural network for activity recognition using
hierarchical skeleton features. Evolutionary
Intelligence, 0123456789, 1–18. https://doi.org/
10.1007/s12065-019-00245-2
Subedar, M., Krishnan, R., Meyer, P. L., Tickoo, O., &
Huang, J. (2019). Uncertainty-aware Audiovisual
Activity Recognition using Deep Bayesian Variational
Inference. Proceedings of the IEEE International
Conference on Computer Vision, 6301–6310.
Sun, J., Mu, Y., Yan, S., & Cheong, L. F. (2010). Activity
recognition using dense long-duration trajectories.
2010 IEEE International Conference on Multimedia
and Expo, ICME 2010, 322–327. https://doi.org/
10.1109/ICME.2010.5583046
Wang, H., Kläser, A., Schmid, C., & Liu, C. (2013). Dense
Trajectories and Motion Boundary Descriptors for
Action Recognition. 60–79. https://doi.org/10.1007/
s11263-012-0594-8
Wang, H., Kläser, A., Schmid, C., & Liu, C. L. (2011).
Action recognition by dense trajectories. Proceedings
of the IEEE Computer Society Conference on Computer
Vision and Pattern Recognition, 3169–3176.
https://doi.org/10.1109/CVPR.2011.5995407
Xiu, Y., Wang, H., & Lu, C. (2018). Pose Flow : Efficient
Online Pose Tracking. British Machine Vision
Conference, 1–12.
Yi, Y., & Wang, H. (2018). Motion keypoint trajectory and
covariance descriptor for human action recognition.
Visual Computer, 34(3), 391–403. https://doi.org/
10.1007/s00371-016-1345-6
Zelnik-Manor, L., & Irani, M. (2001). Event-based analysis
of video. Proceedings of the IEEE Computer Society
Conference on Computer Vision and Pattern
Recognition, 2(1229), 123–130. https://doi.org/
10.1109/cvpr.2001.990935
IMPROVE 2021 - International Conference on Image Processing and Vision Engineering
98
