
A Systematic Approach of Reduced Scenario-based Safety Analysis for
Highly Automated Driving Function
Marzana Khatun
1
, Michael Glaß
2
and Rolf Jung
1
1
Electrical Engineering,Kempten University of Applied Sciences, Kempten, Bavaria, Germany
2
Institute of Embedded Systems/Real-Time Systems, Ulm University, Ulm, Germany
Keywords:
HADF, FuSa, SOTIF, Scenario Reduction, Scenario Modeling.
Abstract:
This paper investigates the scenario catalog generation and scenario reduction approaches for a complete
Highly Automated Driving Function (HADF). Such approaches focus on the clustering and/or grouping of
scenarios by applying a simple stochastic process at an early stage of development. Dealing with an enormous
number of scenarios considering Functional Safety (FuSa), Safety Of The Intended Functionality (SOTIF)
including cybersecurity desires intelligent approaches for HADF’s scenario reduction. The reduction of sce-
narios in HADF is a challenge for automotive researchers since it relates to a large number of parameters
(like environmental aspects). The main contributions of the scenario generation and reduction approach pro-
posed in this work are the following: (1) contribution to a complete scenario catalog for a dedicated HADF, (2)
logical scenario optimization with parameter distribution, and (3) optimize discretization step for finding semi-
concrete scenarios that can be executed. Furthermore, the optimization method incorporating the Monte-Carlo
(MC) experiment with the CarMaker simulation yields a systematic approach to modeling reduced scenarios
without redundancy to support safety.
1 INTRODUCTION
Various safety-related technical approaches are pro-
posed and used in the area of HADFs. Ensuring the
overall safety of the vehicle is a top priority in soci-
ety and industry. The investigation of HADF focuses
on Automation level 3, L3 (conditional automation
driver has to take control at all the times with notice)
and higher automation level 4, L4 (high automation)
and/or L5 (Fully automation) (NHTSA, 2017).
Hazard Analysis and Risk Assessment (HARA) is
one of the major analysis methods widely used in dif-
ferent safety-related sectors like road vehicle safety to
capture critical scenarios, robotics, aero, rail, etc. A
scenario-based extension of the HARA can be used to
extend the area of consideration and to reduce misun-
derstandings during the development phase (Khatun
et al., 2020). On the one hand, such scenario-based
analysis can consider the electrical and/or electronic
(E/E) malfunction and/or the functional insufficien-
cies in terms of identifying safety-relevant scenarios
(known-safe and known-unsafe). On the other hand,
indicates the necessity of tool support to find a set of
unknown-unsafe scenarios by implementing parame-
ter variation for a specific use case or set of scenarios.
For an Operation Design Domain (ODD) of a HADF
like Transverse Guidance is studied to establish a sce-
nario catalog. Although scenario-based safety analy-
sis is beneficial in so many aspects, the main draw-
back of scenario-based hazard analysis is the tremen-
dous increase of scenarios according to functional
and logical expressions with an exploding parameter
space (the combination of logical scenarios parame-
ters).
From the aspect mentioned above, this paper de-
scribes a research effort that aims to establish a
systematic process for scenario generation, model-
ing, and scenario reduction approach applicable to
HADFs deal with higher automation levels (L3 and/or
higher).
The key contributions of this paper for a safety-
relevant systematic approach are for scenario gener-
ation, scenario modeling, scenario reduction, and pa-
rameter variation as follows:
(1) How can grouping and clustering methods be ap-
plied in contribution to a completer scenario catalog
at the very beginning of the concept phase? For ex-
ample, parameters and influencing factors are con-
sidered to cluster the scenarios at the very begin-
ning of the scenario-based safety analysis. (2) How
Khatun, M., Glaß, M. and Jung, R.
A Systematic Approach of Reduced Scenario-based Safety Analysis for Highly Automated Driving Function.
DOI: 10.5220/0010397403010308
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 301-308
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
301

can a scenario reduction method be used systemati-
cally for HADF during the safety analysis process?
There are some reduction methods like hierarchical,
continuous-based, distribution-based, etc. available.
An appropriate reduction method will be proposed
with modifications that can be applied to reduce the
scenarios in the HADF safety analysis process. (3)
What methods can be used to model a scenario and
simulate (e.g. CarMaker, Monte-Carlo) the scenario
in terms of the safety-critical parameter range?
The structure of this paper is as follows, section 2
provides the current status of FuSa and SOTIF. Next,
section 3 describes the scenario catalog generation
process during the research investigation. Afterward,
section 4 introduces a proposed scenario reduction
method in a systematic way for safety development.
Later, section 5 exhibits the scenario modeling and
analysis. Consecutively, section 6 demonstrates the
simulation approach and results based on the method
proposed in previous sections. Finally, section 7 sum-
marizes the outcomes and gives an outlook for further
work.
2 STATE OF THE ART
Safety is the main reason that there is no autonomous
vehicle currently available on the market. The driver
is still responsible for controlling the vehicle featured
with advanced assist systems which exhibit the lim-
itation of systems function and doubt about safety
undermost functional safety and performance limita-
tions. The standard ISO 26262:2018 is state of the
art for road vehicle’s FuSa. FuSa defines as “the ab-
sence of unreasonable risk due to hazards caused by
malfunctioning behavior of E/E systems” (ISO26262,
2018). ISO/PAS 21448:2019 describe SOTIF as “ab-
sence of unreasonable risk due to hazards resulting
from functional insufficiencies of the intended func-
tionality or from reasonably foreseeable misuse by
persons” (ISO/PAS21448, 2019). Nonetheless, both
of them are developed only for L2 vehicles, not for
HADFs (L3, L4, and L5).
Scenario-based safety analysis is necessary for
HADFs in respect of environmental, traffic situation
consideration, and homologation purpose. It is widely
understood that FuSa is not enough and SOTIF in the
matter of functional inefficiencies including security
need to be considered for assuring the overall safety
of the HADF. Scenario-based safety analysis is not
new and several research projects are investigating
this area like (Galizia et al., 2018), (Mazzega, 2019),
(Leither et al., 2020). But, none of them present a full
set of scenarios for the safety analysis process for any
specific HADF.
However, the challenge is to implement the FuSa
and SOTIF process in a scenario-based HADF. The
amount of scenarios is increasing together with the
complexity of the system architecture if scenario-
based safety analysis is considered. The existing
scenario-based safety analysis method (e.g. HARA)
with some modification to a complete HADF like
Transverse Guidance Assist System (TGAS) is al-
ready examined(Khatun et al., 2020). The outcome of
this investigation provides the great necessity of sys-
tematic approaches of scenario reduction for model-
ing and simulation of HADF scenarios.
A Functional scenario is a basis for any scenario-
based analysis. According to author Menzel,“ func-
tional scenarios include operating scenarios on a se-
mantic level including linguistic scenario notation.
The description of functional scenarios is specific for
the use case” (Menzel et al., 2018). The definition for
logical scenario is, “it includes operating scenarios
on a state space level can express with the help of pa-
rameter ranges in the state space. A logical scenario
includes a formal notation of the scenario” (Kalis-
vaart et al., 2019). Furthermore, concrete scenario-
“a concrete scenario is fully defined sequence. It de-
scribes a single instance from a logical scenario.”
(Kalisvaart et al., 2019).
At the very beginning (Functional scenarios) of
the safety development phase for HADF can be based
on (a) risk analysis, (b) an accident database, and (c)
virtual & long term vehicle test as described in (Gal-
izia et al., 2018),(Damm et al., 2020) and (Fadhloun
et al., 2020) but no scenario reduction approach is
included explicitly. However, The parameter space
explosion relates to factors like influence parameters,
systematic test case. Based on Amersbach and Win-
ner, choosing the correct discretization step is a chal-
lenge yet to be overcome (Amersbach and Winner,
2019).
The stochastic approach for scenario reduction,
such as scenario tree reduction for multistage stochas-
tic programs is proposed and developed with a sound
theoretical basis with numerical experiences, keep-
ing in mind the optimization model for electricity
portfolios (Holger and Werner, 2009). Stochastic
programming-based scenario reduction approach is
used in electrical load in a power management model
(Holger and Werner, 2003). But, these approaches are
not formulated for an exemplary case of any HADF’s
scenario reduction.
The focus of our work is to implement the simple
stochastic approach to reduce scenarios at the concept
phase (left side of the V model) of a HADF.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
302
3 GENERATING SCENARIO
CATALOG
The scenario catalog provides a set of use cases for
HADF safety analysis and is a base for further de-
velopment. Based on the use cases, test runs can be
generated. The scenario catalog provides support to
define logical scenarios and concrete scenarios. The
ODD is one of the characterization approaches to gen-
erate a scenario catalog. Society of Automotive En-
gineers (SAE), defines the ODD as “operating con-
ditions under which a given driving automation sys-
tem or feature thereof is specifically designed to func-
tion, including, but not limited to, environmental, ge-
ographical, and time-of-day restrictions, and/or the
requisite presence or absence of certain traffic or
roadway characteristics” (SAEJ3016, 2018). It is ob-
vious that defining the area outside ODD is difficult
and less informative regarding the vast area that is out
of the scope for HADF. It would rather make more
sense to identify the area inside the ODD which re-
duces the observation area to analyze the functional
boundaries of the system.
During scenario-based safety analysis, the num-
ber of functional scenarios is increasing tremendously
and lead to the necessity of a scenario reduction
approach for HADF. Moreover, finding new safety-
relevant scenarios from virtual tests with parameter
variation is in the scope of our research. By pa-
rameter variation, unknown-unsafe areas will be de-
termined as simulation will be run considering opti-
mization methods. Then, the unknown-unsafe area
will be turned into a known-unsafe area as the area is
found by simulation, hence, not unknown anymore.
Author Georg graphically represented the reduction
of unknown-unsafe area in his paper but didn’t men-
tioned the evaluation process (Macher et al., 2019).
If the area is known, safety measures can be imple-
mented to make the area safe so it’s turning into a
known safe area based on optimization results. Thus,
we can enlarge the ODD area for HADF gradually
and the safety-relevant scenario catalog will keep
growing and tools like CarMaker is used for scenario
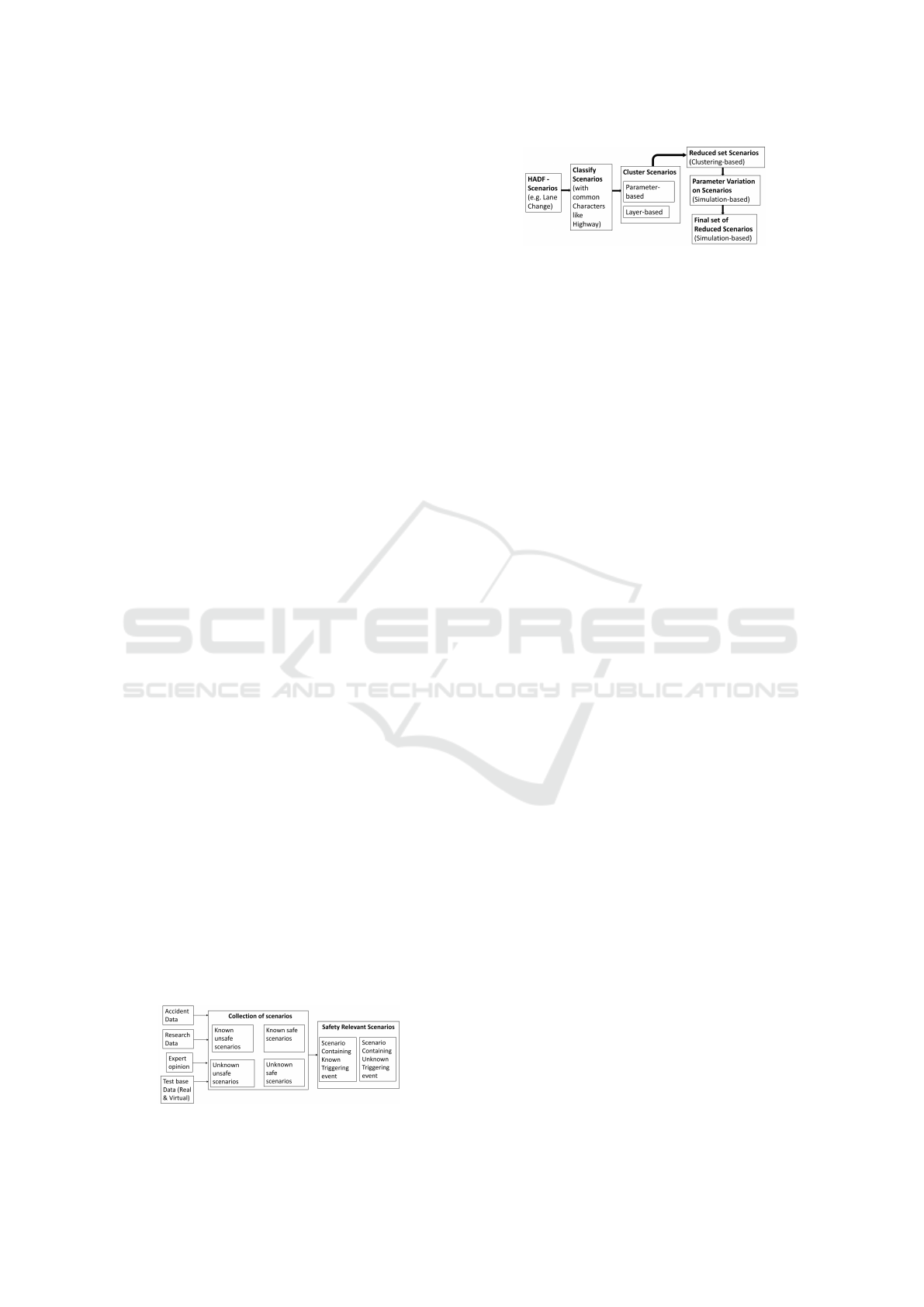
modeling and simulation. Therefore, the first key con-
tribution of this paper is realized (modeled scenario
catalog). Figure 1 gives a glimpse of the process as
Figure 1: Safety relevant Scenario catalog-flow diagram.
Figure 2: Proposed Scenario Clustering Approach.
described above in a simple block diagram.
For the implementation of Scenario-based HARA
in a specific HADF such as TGAS can be used
(Khatun et al., 2020). We realized that restriction
of ODD is necessary to deal with the huge number
of scenarios focusing on vehicle malfunction (FuSa)
and SOTIF (functional insufficiency) at function level
for a complete HADF. To show the completeness of a
scenario-based HARA, restricted ODD for the TGAS
of the HADF is examined (like a logical scenario, lane
change in the highway). Hence, a targeted use case
is analyzed, assessed, and a scenario catalog is pro-
posed. In detail, the ODD is restricted by considering
highly automated lane change function in the highway
with other road users (3 road users) in a good environ-
mental condition. The basic scenario is based on two
vehicle functions (like turning left and turning right)
with functional units of ego vehicle (such as solid ob-
ject detection, moving object detection, etc).
4 SCENARIO REDUCTION
METHOD
The combination of different parameters (e.g road
type, environment, ego vehicle breaking) for a single
functional scenario leads to a high number of logical
scenarios. From the investigation of scenario-based
hazard analysis (Khatun et al., 2020), the functional
scenario ”lane change” around 537,602 possible sce-
narios were derived by full factorial combination of
parameters based on the 6 layer model (as described
in section 5) without applying parameter discretiza-
tion steps. The clustering of scenarios at the top level
is possible in connection with the context and sim-
ilarity of the assessment. Safety-relevant parameters
are grouped based on the scenario classification to im-
plement the clustering approach for scenario reduc-
tion. After that, for a specific safety-relevant parame-
ter, variation is applied and collision result is analyzed
to establish a reduced set for concrete scenarios. The
proposal is illustrated in Figure 2. In the simulation,
the selection of the correct discretization width step
for parameter variation is an observation oriented (ex-
periment and/or study based) approach at the logical
scenario. The overall range is compromised by ODD.
A Systematic Approach of Reduced Scenario-based Safety Analysis for Highly Automated Driving Function
303

Computation time for large number of parame-
ters of scenario-based analysis is a challenge yet to
be solved. To support the scenario reduction, the
stochastic approach is estimated to optimize the criti-
cal scenarios at the early stage of development. Based
on the research (Dupa
ˇ
cov
´
a and Kozm
´
ık, 2015), the
random parameters in stage t= 2, ...T as ξ
t
, where
T is a given horizon, and ξ is a situation (parameter
set) are assumed. The random elements are estimated
based on simulation, distribution, or from known field
tests. The parameters of the first stage, ξ
1
= (c
1
, A
1
,
b
1
), are assumed to be known based on decision x
1
(like lane change function will activate when colli-
sion free lane change is possible otherwise not). The
random parameters at stage t, ξ
t
contain cost coeffi-
cients c
t
, constraint matrix A
t
, the recourse matrix B
t
and constraints coefficient b
t
. For example, the cost
for performing a lane change differing from different
(desire) velocity, recourse matrix reflect the safety pa-
rameters (e.g. safe distance) and weather condition
and/or road type (highway) can be considered as con-
straints parameters. For first stage, the probability dis-
tribution is known for simulation.
The components of ξ and the decisions x are as-
sumed to be random vectors and defined on some
probability triple (Ω, F , P). Here, Ω is a set of all pos-
sible outcomes (possible lane change situation from
safety analysis) and F is a set of events (collision with
the vehicle in-front or side or behind). An event is be-
ing a set of outcomes in the sample space (only con-
sider the collision with the vehicle in-front). Let, F
t
⊆ F be the σ-field generated by the projection of the
stochastic data process ξ. The sequence of decisions
and observations is
x
1
, ξ
2
, x
2
(x
1
, ξ
2
), ...., x
T
(x
T −1
, ξ
2
, ....ξ
T
) (1)
In scenario reduction assumptions, P is the discrete
probability distribution carried by a finite number of
scenarios (ξ
1
, ξ
2
,....,ξ
N
) with probability p
i
> 0, i =
1,....,N (
∑
i
p
i
= 1) and Q is the discrete probability
distribution with a lower number of atoms (scenar-
ios). Generally, atoms of the reduced distribution do
not need to correspond with atoms of the original dis-
tribution (Dupa
ˇ
cov
´
a and Kozm
´
ık, 2015).
For the first run, the statistical data approximation
of P and a subset of the atom of P is carried by Q. The
number of reduced scenarios are denoted as j ∈ J ⊂
{1,....,N}. In statistical distance d (P, Q) variation, the
distance between two probabilities is measured from
the first simulation result. This approach can be ap-
plied with multiple stages (multistage stochastic) for
HADF in light of the functional scenarios to logical
scenarios regarding the influences of parameters like
distance with realtive speed of two vehicles. The opti-
mization of parameter’s range at the first stage (func-
tional scenario) is the focus of this paper which can
support limiting the logical scenarios.
The accident samples and testing phase are lim-
ited(Kopestinsky, 2021). The simulation-based op-
timization considering the available accident statis-
tics of L2 vehicle’s are taken as distributed input pa-
rameters. To overcome the discretization step (cor-
rect range) of parameters from functional scenario to
logical scenario, normal distribution of the parame-
ters (e.g. distance between vehicles) is assumed us-
ing mean, median, and standard deviation of discrete
parameter distribution for the first probability exper-
iment (MC) and verified by CarMaker simulation.
Hence, a possible precise range of parameter bound-
aries can be achieved by two steps: first, by proba-
bility estimation and second, by parameter variation
based on the outcomes of the first step.
This section contributes to the functional scenar-
ios reduction regarding parameter variation and clus-
tering. One functional scenario can be described with
different safety-critical levels caused by a different
range of one parameter and/or combination of pa-
rameters. Parameters can be selected by vehicle pa-
rameters (e.g. Speed), road type (e.g. highway, ur-
ban), safety measures (e.g. distance), etc. To trace
the meaningful reduced functional scenarios utilizing
relation between function units (camera, radar, etc)
and vehicle’s functions are realized by pre-selection
of the triggering events. The combination of FuSa
and SOTIF safety analysis is done by developing a
generic HARA focus on both FuSa and SOTIF as-
pect (Khatun et al., 2020). During the investigation,
based on a HADF (TGAS) in an ODD, around 786
scenarios are observed for HARA analysis for the use
case (as described in section 3). The pre-selection ap-
proach is able to reduce the total number of scenar-
ios to around 444 which is about 43% achieved from
hazard analysis. But, the number is still huge and
an additional reduction process is required. The pre-
selection approach is, each possible triggering events
has been estimated with vehicle malfunction and the
vehicle’s functional insufficiencies for a specific func-
tion to support validation. For example, function like
detection of a moving object is only possible if a cam-
era is providing the correct signal to the the function-
ally safe vehicle. Consequently, clustering and group-
ing are applied to reduce the scenarios as well. Addi-
tionally, a simple scenario reduction approach is de-
scribed to confirm the second and the third key con-
tribution of the paper. This paper does not focus on
a further reduction approach for particular test cases
and test criteria but investigates the simulation results
to collect a reduced set of reduced logical scenarios
only.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
304
5 SCENARIO MODELING AND
ANALYSIS
Modeling the scenario in HADF has great benefit by
means of:
• visualizing the scenario
• parameter variation
• identifying the possible unknown-unsafe area
• optimizing discretization step
To start with the scenario modeling, a systematic
description of the scenario (lane change) is layered
as proposed in the Pegasus project (Mazzega, 2019).
But, only five layers (from layer 1 to Layer 5) are con-
sidered for modeling scenarios in this paper. The last
Layer (Layer 6- digital information) is out of scope
for the scenario modeling. All layered information is
combined and a list of scenarios is estimated using
simple simulations as described: For each scenario,
layers L
i
(Layer1 = L1, Layer2 = L2, Layer3 = L3,
Layer4= L4, Layer5 = L5), where i = {1, 2, ...5}; as
only 5 layers are assumed. So, the total functional
scenario set is:
Functional Scenario =
5
∏
i=1
L
i
(2)
where each layer assign with a different cardinal-
ity set in terms of different categories and/or types.
Assumed, L1={1l
1
, 1l
2
...1l
a
}; L2={2l
1
, 2l
2
...2l
b
};
L3={3l
1
, 3l
2
...3l
c
}; L4={4l
1
, 4l
2
...4l
d
}; L5={5l
1
,
5l
2
...5l
e
}. The symbols a, b, c, d, e define the finite
cardinality number of each layer. A simple represen-
tation is shown in Table 1.
Table 1: Layer-based Scenario modeling.
Layer Description of Layer with elements
Layer1 (L1) Road level
(straight,cruved,uphill...)
Layer2 (L2) Traffic Infrastructure
(construction site, road sign,...)
Layer3 (L3) Combination of L1 and L2
(single lane same direction, ...)
Layer4 (L4) Objects
(Other traffic, solid object, ...)
Layer5 (L5) Environment
(Sunny, cloudy, rainy, snow,...)
The total possible set of functional scenarios
can be constructed by associating every element of
one set with each element of another set by us-
ing the cartesian product.Thus, the Equation 2 can
be expressed for a single functional scenario as
(1l
1
, 2l
1
, 3l
1
, 4l
1
, 5l
1
) | 1l
1
∈ L1; 2l
1
∈ L2; 3l
1
∈ L3;
4l
1
∈ l4; 5l
1
∈ L5.
Layer information is used as a basis for the mod-
eling of any HADF functional scenario. The layer-
based approach is easy to understand, but challenging
to model because the layer-based approach describes
the scenario as semantics. Therefore, for efficiently
modeling the scenario (re-usability) parameter-based
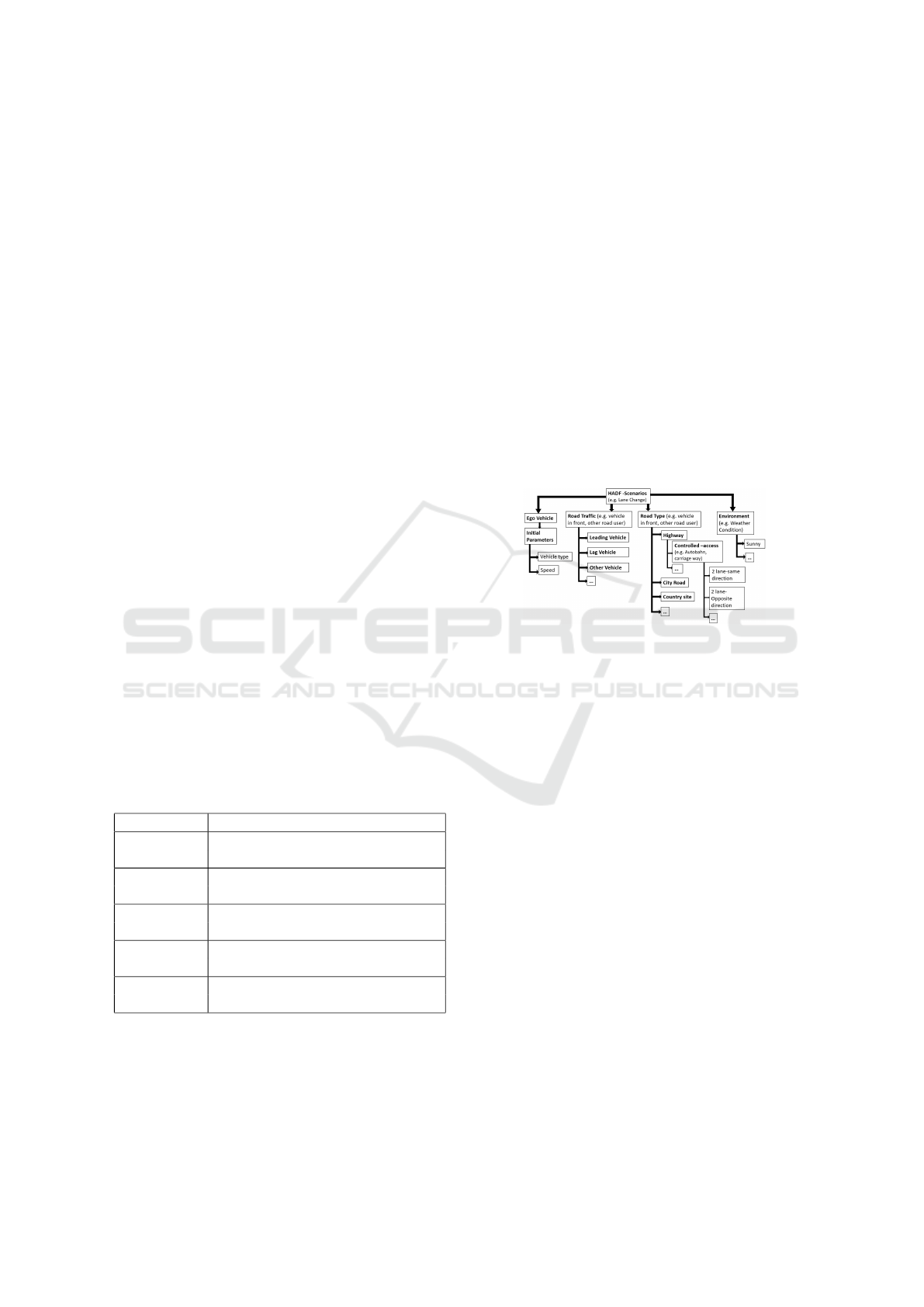
clustering is assumed. Four major steps, to insert the
parameters in a scenario are:
• Ego vehicle parameters
• Road type parameters
• Road traffic and Environment Parameters
For modeling the scenarios, tools like CarMaker
are used. Figure 3 overlays the scenario modeling ap-
proach with four steps.
Figure 3: Scenario Modeling steps (in CarMaker).
One of the goals for parameter-based modeling is
to reuse the modeled scenario (partly or fully) in the
next level of analysis like analyzing the logical sce-
nario for the selection of the discretization step. Al-
though, modeling scenario consumes some amount of
time, but it is necessary to simulate the scenario at
concept phase to identify the safety-relevant parame-
ters. The re-usability of the scenario model will pro-
vide great help and make the process faster for further
(new) scenario generation.
To reduce the effort of modeling scenarios in tools
(e.g. CarMaker) and to optimize the possible bound-
ary of parameters from a probability distribution, a
simple Monte-Carlo (MC) experiment is applied in a
HADF’s lane change use case scenario. The opti-
mization technique is chosen for HADF analysis as
concrete field test data are not available for research.
However, a high-performance computing system is
demanded for such type of experiment (to minimize
the computing time), but it’s still possible to get the
result of collision probability with the leading vehicle
by varying a specific parameter (speed) over a certain
boundary in the use case.
Initial parameters are assumed based on research,
field experiment results like probability distribution
((Gyllenhammar et al., 2020), (Hassan et al., 2014),
A Systematic Approach of Reduced Scenario-based Safety Analysis for Highly Automated Driving Function
305
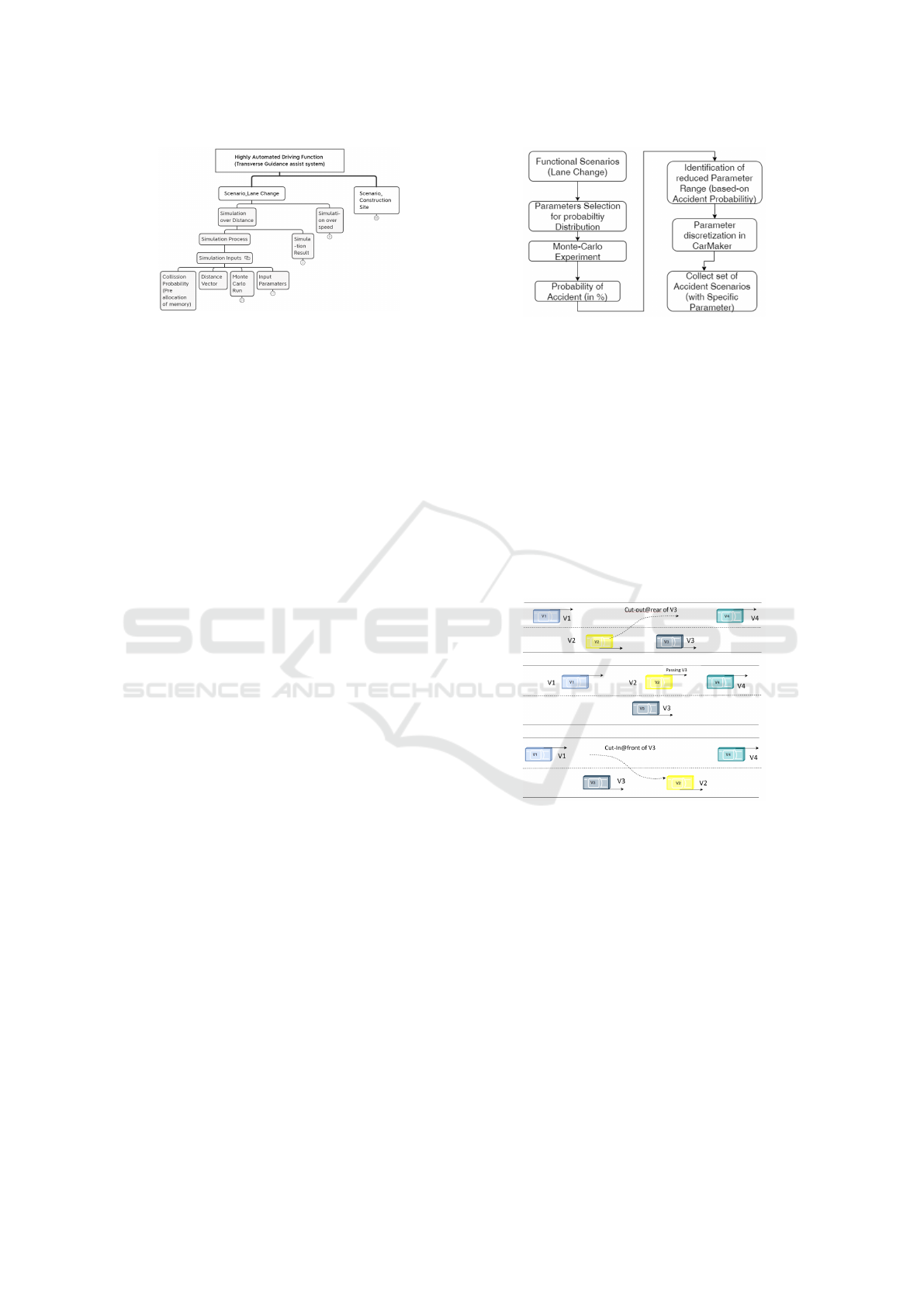
Figure 4: Monte Carlo Simulation for Parameter Optimiza-
tion.
(Cana et al., 2008), etc). So, a finite number of sce-
narios are weighed as reflects (ξ
1
, ....,ξ
N
) and discrete
probability distribution with a lower number of atoms
(Q) is optimized in the MC experiment. Based on the
first run (1st simulation) result, parameter adjustment
has been done in the later revisions of the MC ex-
periment. The goal for this experiment is to get the
collision probability concerning parameters (distance
between vehicles, speed). A model-based approach
of the experiment process is represented in Figure 4.
6 SCENARIO SIMULATION
The goal is to find the critical parameters to realize
the HADF by simulation. No longer a vehicle with
HADF can be validated and verified for a limited
set of use cases. Unusual situations can arise while
driving and test case numbers are increasing drasti-
cally. So, to confirm vehicle’s performance and find-
ing the key parameters and/or combination of param-
eters, scenario-based simulation with optimization is
performed. The key concept of our investigation is to
reduce the area for modeling scenarios in an efficient
way.
This section divides the scenario simulation into
two parts to explain the fourth key contribution of this
paper. The first part demonstrates the optimization of
a parameter by MC simulation. The second part pro-
vides the modeled scenario with parameter variation
to optimize the boundary range for a Logical scenario.
The complex stochastic approach will be applied to
the logical scenario to reduce the scenarios. Each log-
ical scenario can exponentially increase the number
of concrete scenarios with respect to parameter vari-
ation (x
j
with j = {1,2,...,N}) which can be shown in
the equation:
Logical Scenario =
5
∏
i=1
N
∏
j=1
L
i
∗ x
j
(3)
The process of the modeling scenarios and exper-
iment of scenarios is highlighted by a flow diagram in
Figure 5.
Figure 5: Scenario Simulation Flow Diagram.
As described in section 3, probability triple (Ω,
F , P) is described where Ω is a set of all possible out-
comes. The functional scenario image is created in
2D which is enough for MC simulation as represented
in Figure 6 where a straight highway with three other
road users are considered for the experiment. The ego
vehicle is marked as yellow color (V1) and other road
vehicles are marked with different light colors like
carolina blue (V1), dusty blue (V2), and aqua (V3).
The scenario is that the ego vehicle is turning from
the right lane to the left lane of the road and over-
taking vehicle V3 and then back to the previous lane
again.
Figure 6: Functional Scenario (Lane Change of HADF
Level 3 automation).
Based on the described scenario the MC experi-
ment is done for HADF. It is well known that statisti-
cal data for HADF is not well established and limited
up to L2 for certain cases. The discrete probability of
parameter distribution is found for L2 vehicles which
are assumed to be the same for L3 vehicles at the be-
ginning of the experiment to optimize the parameter
range ((Gyllenhammar et al., 2020), (Hassan et al.,
2014), (Cana et al., 2008), etc). For simplicity of the
simulation, a continuity correlation (Normal approx-
imation) is used by a given mean and standard devi-
ation to approximate the discrete distribution by con-
tinuous distribution. The result of the simulation is a
discrete probability distribution of the occurrence of
an accident over parameters (like distance with other
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
306
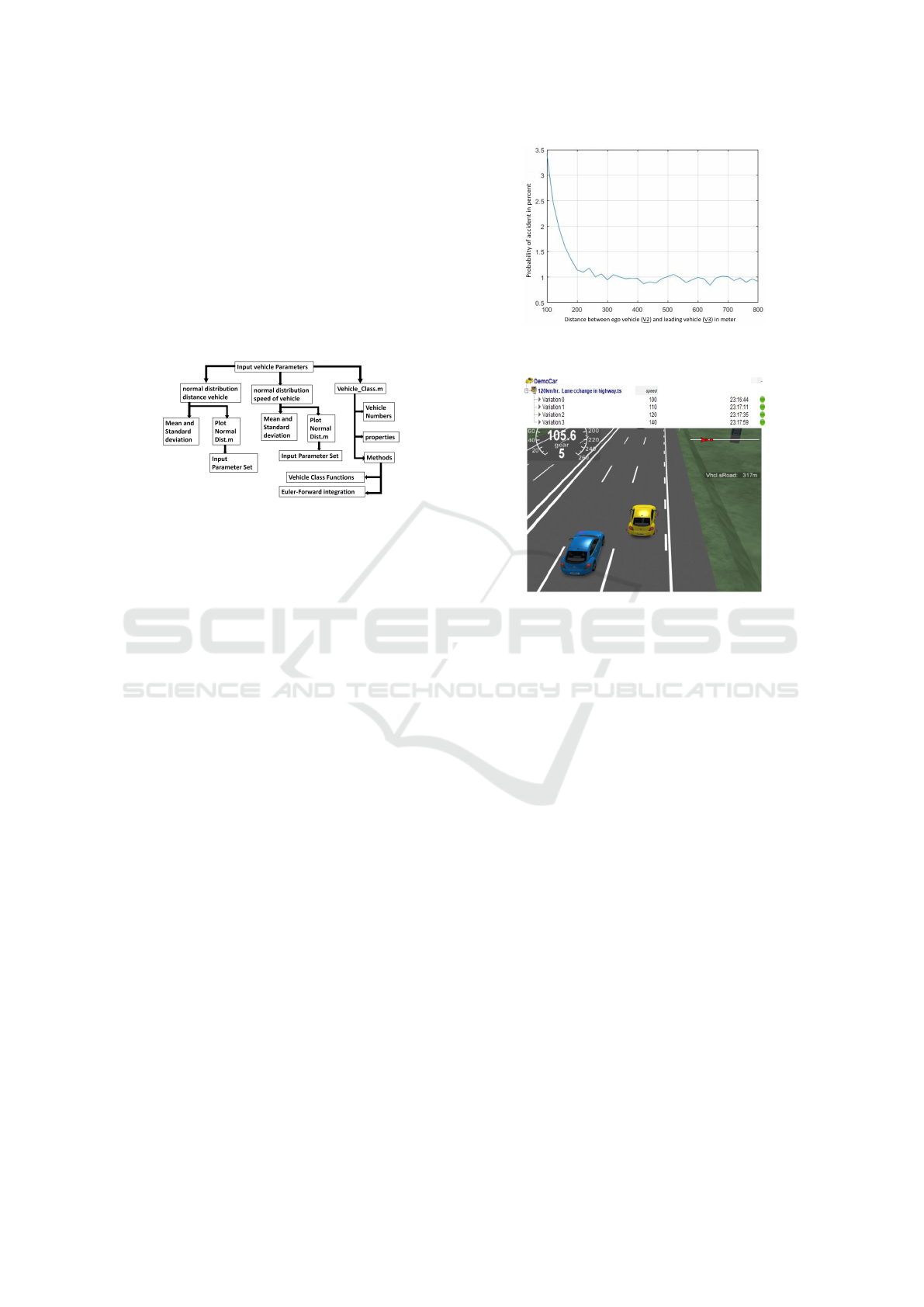
vehicles). The approximation of the input parame-
ters is shown in Figure 7. The probability distribu-
tion describes the possible values and likelihood that
a random variable can be taken within a given range.
The ranges can be bounded as a minimum and max-
imum possible values. To identify the precise possi-
ble value, the distribution factor needs to be plotted.
These factors include the mean, median, and standard
deviation. So, probability distribution is considered
as input for parameters like vehicle’s in-between dis-
tance (V1 and V2, V2 and V3 and V3 and V4).
Figure 7: Input parameters approximation for Monte-Carlo
Simulation.
The output of the experiment provides the proba-
bility of an accident in percent over the distance be-
tween the ego vehicle (V2) and leading vehicle (V3)
as exhibited in Figure 8. To build confidence and get-
ting an acceptable optimization value, several thou-
sand Monte-Carlo runs are examined. To utilize MC,
several sets of MC run (Like, 800 MC runs, 1000 MC
runs and 30000 MC runs) has been computed and op-
timize the probability of the accident. Although, the
computational costs are high for the MC scenario sim-
ulation and improvement can be possible. However,
MC helps to assess the safety and to estimate reduced
boundary of the safety critical parameters. Further-
more, the paper tries to propose a concept that sup-
ports reducing the scenarios up to a level and provide
evidence by probability assumption not enforcing the
accuracy of the performance of the experiment. Al-
though, a future research aspect is to compare the re-
sult with completely different tools like CarMaker for
optimizing the acceptable result. Based on the acci-
dent probability result, the distance range and speed
of the vehicles are considered for parameter variation
with discretization steps in CarMaker simulation.
From the MC experiment, optimized boundary pa-
rameters are used in CarMaker scenario modeling and
simulation. To build the confidence of the optimized
result and determining the accuracy from the MC ex-
periment, the same scenario is modeled in CarMaker,
and results are compared.
The discretized steps are considered as a variation
of parameter in CarMaker as variation as illustrated in
Figure 9. Ego vehicle’s speed is considered as a pa-
Figure 8: Monte-Carlo Simulation output (Probability of
accident).
Figure 9: Parameter Variation in a Logical scenario.
rameter for variation and the simulation result is ob-
served. CarMaker simulation is a repetitive approach
to finding possible collision scenarios with specific
parameters. Undoubtedly, the simulation results sup-
port the scenario catalog (by listing a possible group
of use cases) and the concrete scenario generation.
The concrete scenario set can be used for further test
case application.
7 CONCLUSIONS
The reason for applying the same optimization
method to two different tools is to compare the out-
comes with no redundancy which supports safety val-
idation and verification. Our scenario-reduction ap-
proach will downsize the modeling effort by opti-
mized parameter’s boundary. Further reduction in
logical scneario is possible by implementing MC in
logical scenarios modeled in CarMaker (using tool in-
terference like Matlab). It is ssumed that by observing
the simulation with parameter variation, unknown-
unsafe scenarios can be realized which are carried in
the scenario catalog and provides support to complete
the scenario catalog for a HADF.
The proposed pre-selection approach for an ODD
of TGAS shows the functional scenario reduced about
A Systematic Approach of Reduced Scenario-based Safety Analysis for Highly Automated Driving Function
307

43% during scenario-based hazard analysis (at the
early stage by clustering and grouping) is counted as
an outcome of this paper for supporting a complete
HADF scenario set. Furthermore, using a stochas-
tic program to optimize the safety-relevant parame-
ter’s boundary reduces the number of logical scenar-
ios which reduce the effort of modeling scenarios.
A simple stochastic program is advantageous at the
function level to deal with a large number of scenar-
ios and uphold to sustain a systematic approach that
supports the safety aspect of HADF. This approach
supports in general to build confidence in simulation-
based scenario investigation in HADF development
which can be cost-effective and time-efficient. Al-
though, a further scenario reduction approach is re-
quired from a logical scenario to concrete scenario
determination.
In our future research, we would like to focus on
the complete scenario database for a complete HADF
and propose a reduced set of concrete scenarios based
on simulation results that can support to provide ev-
idence for safety approval (homologation). Approxi-
mation techniques that reduce more scenarios in each
step of clustering and/or grouping at function level
may be improved by other types of stochastic pro-
grams like a multistage program. Interesting is to ob-
serve the accuracy rate of the experiment and simu-
lation result by studying a huge number of scenarios
which has to be investigated.
REFERENCES
Amersbach, C. and Winner, H. (2019). A contribution to
overcome the parameter space explosion during vali-
dation of highly automated driving. Taylor & Francis,
20th edition.
Cana, R., Ferrares, P., Townsend, E., Jost, G., Janitzek, T.,
Pogorelov, E., Popolizio, M., Simcic, G., and Berg,
Y. (2008). Speedfact sheet. German Autobahn: The
Speed Limit Debate.
Damm, W., M
¨
ohlmann, E., and Rakow, A. (2020). Valida-
tion and Verification of Automated Systems. Springer
Nature Switzerland AG., European Union, 1st edition.
Dupa
ˇ
cov
´
a, J. and Kozm
´
ık, V. (2015). SDDP for multistage
stochastic programs: preprocessing via scenario re-
duction. Springer.
Fadhloun, K., Rakha, H., Loulizi, A., and Wang, J.
(2020). A validation study of the fadhloun-rakha car-
following model. In Proceedings of the 6th Interna-
tional Conference on Vehicle Technology and Intel-
ligent Transport Systems - Volume 1: VEHITS,. IN-
STICC, SciTePress.
Galizia, A. D., Bracquemon, A., and Arbaretier, E. (2018).
A scenario-based risk analysis oriented to manage
safety critical situations in autonomous driving. Safety
and Reliability – Safe Societies in a Changing World,
pages 1357–1362.
Gyllenhammar, M., Johansson, R., Warg, F., Chen, D.,
Heyn, H., Sanfridson, M., and Ursing, S. (2020). To-
wards an operational design domain that supports-
the safety argumentation of an automated driving sys-
tem. 10th European Congress on Embedded Real
Time Software and Systems (ERTS2020).
Hassan, S., Puan, O., Mashros, N., and N.Sukor (2014).
Factors affecting overtaking behaviour on single car-
riageway road: Case study at jalan kluang-kulai. Spe-
cial Issue on Highway and Transportation Engineer-
ing Part 1.
Holger, H. and Werner, R. (2003). Scenario Reduction Al-
gorithm in Stochastic Programming. Springer.
Holger, H. and Werner, R. (2009). Scenario tree reduction
for multistage stochastic programs. Springer.
ISO26262 (2018). Road vehicles — Functional safety. ISO,
2nd edition.
ISO/PAS21448 (2019). Road vehicles — Safety of the in-
tended functionality. ISO, 1st edition.
Kalisvaart, S., Slavik, Z., and Camp, O. (2019). Valida-
tion and Verification of Automated Systems. Springer,
Cham., Switzerland, 1st edition.
Khatun, M., Glaß, M., and Jung, R. (2020). Scenario-based
extended hara incorporating functional safety and so-
tif for autonomous driving. 30th European Safety and
Reliability Conference.
Kopestinsky, A. (2021). 25 astonishing self-driving car
statistics for 2021. Policy Advice.
Leither, A., Watzenig, D., and Ibanez, J. (2020). Valida-
tion and Verification of Automated Systems. Springer
Nature Switzerland AG., European Union, 1st edition.
Macher, G., Druml, N., Veledar, O., and Reckenzaun,
J. (2019). Safety and Security Aspects of Fail-
Operational Urban Surround perceptION (FUSION).
IEEE2018, China.
Mazzega, J. (2019). Pegasus method: An overview. PE-
GASDU Symphony.
Menzel, T., Bagschik, G., and Maurer, M. (2018). Scenar-
ios for development, test and validationof automated
vehicles. 2018 IEEE Intelligent Vehicles Symposium
(IV), Changshu.
NHTSA (2017). Automaed Driving Systems-A Vision for
Safety. u.s Depertment of transportation, U.S, 2nd edi-
tion.
SAEJ3016 (2018). Taxonomy and definitions for terms re-
lated to driving automation systems for on-road motor
vehicles. 30th European Safety and Reliability Con-
ference.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
308
