Application of Multiagent System and Tabu Search for Truck
Dispatching in Open-pit Mines
Gabriel Icarte Ahumada
1,2 a
and Otthein Herzog
3,4,5 b
1
International Graduate School for Dynamics in Logistics (IGS), University of Bremen, Bremen, Germany
2
Faculty of Engineering and Architecture, Arturo Prat University - UNAP, Iquique, Chile
3
University of Bremen, Germany
4
Jacobs University Bremen, Germany
5
Tongji University Shanghai, China
Keywords:
Truck Dispatching, Open-pit Mine, Multiagent Systems, Tabu Search, Scheduling, Rescheduling.
Abstract:
An important and complex process in the mining industry is the material handling process. In this process,
trucks must transport materials extracted by shovels to different places at the mine. To enable efficient material
handling processes, the decision on the destination of a truck is crucial. Currently, this process is supported by
an approach based on centralized systems that apply dispatching criteria. A disadvantage of this approach is
not providing a precise dispatching solution because of missing knowledge about potentially changed external
conditions and the dependency on a central node. We previously developed a multiagent system (MAS-TD)
to solve this problem. In the MAS-TD, intelligent agents that represent real-world equipment interact with
each other to generate schedules. In this paper, we evaluate the MAS-TD by comparing it against a Tabu
Search procedure. In the evaluation, simulated scenarios based on actual data from a Chilean open-pit mine
were used. The results show that both MAS-TD and the Tabu Search procedure are suitable methods to solve
the truck dispatching problem in open-pit mines. However, the schedules generated by MAS-TD are more
efficient than the schedules generated by the Tabu Search.
1 INTRODUCTION
In open-pit mines, the material extracted by shovels
must be transported by trucks to different destinations
at the mine. If a shovel is extracting ore, the extracted
material must be transported by a truck and unloaded
into a crusher or onto a stockpile. If the extracted ma-
terial is waste, it must be transported to a waste dump.
This process is called material handling and it is an
important process for these kinds of mines since the
costs involved in this process can represent up to 50%
of the entire operational cost (Alarie and Gamache,
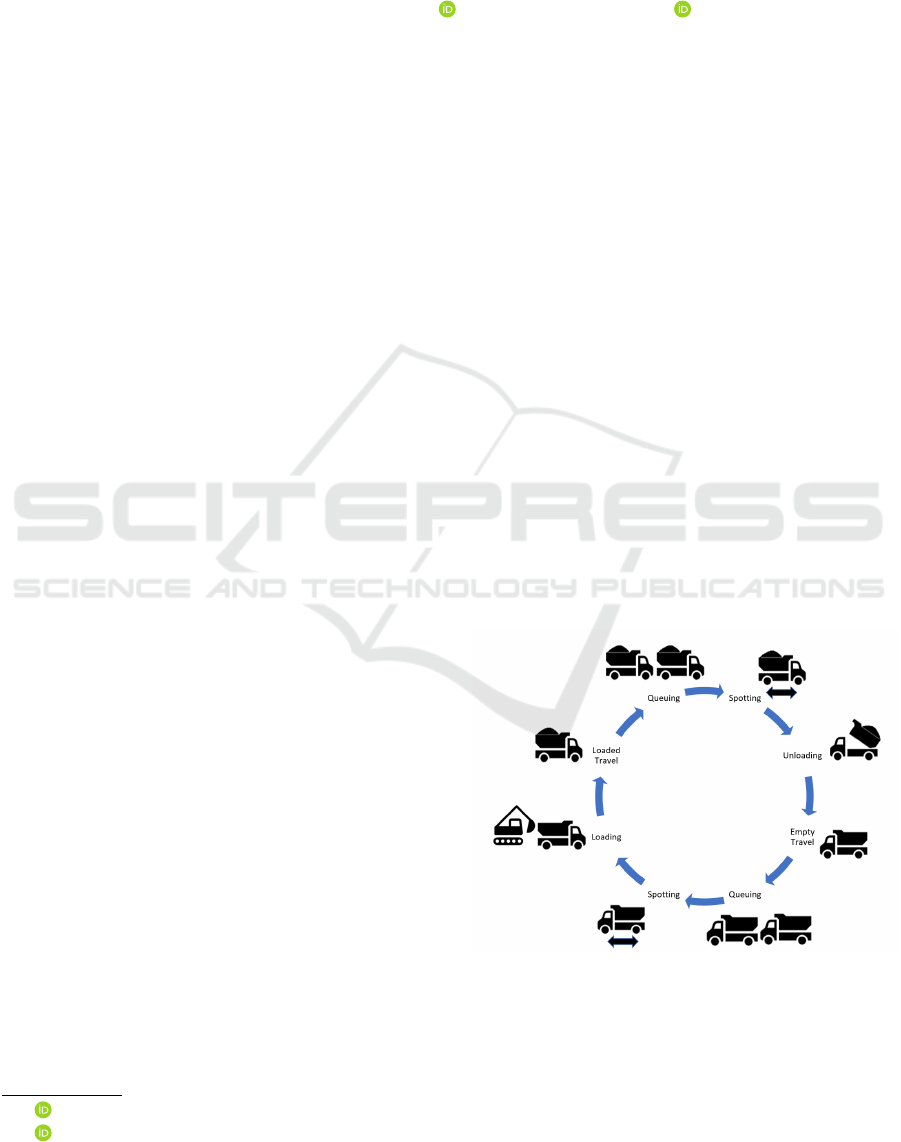
2002). Figure 1 shows the operations that a truck must
perform from a loading point (shovel) to an unloading
point (crusher, stockpile, or waste dump). These op-
erations are performed repeatedly by a truck until the
shift ends.
Open-pit mines are closed systems where the op-
erations performed are affected by a dynamic envi-
a
https://orcid.org/0000-0002-1997-0053
b
https://orcid.org/0000-0003-4781-2551
Figure 1: The truck cycle. Adapted from (Icarte et al.,
2020).
ronment. For instance, equipment failures, changes
in weather conditions or to the state of the routes af-
fect the performance and availability of equipment
and generate delays in material handling (Adams and
Bansah, 2016). In this context and, with the process’s
stochasticity, determining a new destination for the
160
Icarte Ahumada, G. and Herzog, O.
Application of Multiagent System and Tabu Search for Truck Dispatching in Open-pit Mines.
DOI: 10.5220/0010391101600170
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 1, pages 160-170
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

truck is not easy.
Currently, the material handling process is sup-
ported by centralized systems based on Operation
Research methods, heuristic procedures, or simula-
tion modeling (Icarte and Herzog, 2019). Most of
these systems use a multistage approach (Alarie and
Gamache, 2002), which computes a guideline in the
first stage. A later stage uses this guideline and a dis-
patching criterion (e.g., the current production level
of the shovels) to dispatch the trucks in real-time each
time that the latter requires.
Despite using these solutions, material handling
in open-pit mines is not performed efficiently. For
instance, trucks may queue up in front of shovels or
crushers while other shovels wait for trucks. This
generates inefficiency, high costs, and not achiev-
ing production targets. Researchers describe that the
current systems don’t solve the problem appropri-
ately because they do not provide a precise represen-
tation of the activities performed by the equipment
(Patterson et al., 2017) and the use of estimated in-
formation (Chang et al., 2015; Costa et al., 2005;
Krzyzanowska, 2007; Newman et al., 2010).
Icarte et al. (Icarte et al., 2020) developed an al-
ternative solution that allows to organize more effi-
ciently the equipment items operations. The solution
is based on a Multiagent system in which intelligent
agents represent real-world equipment. These agents
interact with each other to generate their schedules.
In this paper, we extend the work presented in
(Icarte et al., 2020) by comparing the MAS-TD
against a Tabu Search procedure. Many papers
have demonstrated the application of Tabu Search for
scheduling problems, even for truck dispatching, e.g.,
(Liao et al., 2014). The comparison was performed by
the simulation of scenarios based on actual data from
a Chilean open-pit mine.
The remainder of this paper is structured as fol-
lows: Section 2 presents related work. Section 3 gives
an overview of the developed MAS-TD. Then, Sec-
tion 4 presents the Tabu Search procedure. Section 5
provides the comparison between the MAS-TD and
the Tabu Search procedure and a discussion. Finally,
conclusions and outlook are presented in Section 6.
2 RELATED WORK
The truck dispatching problem in open-pit mines has
been faced in many publications during the last years.
These articles show different methods that try to
achieve two goals: improve productivity and reduce
operating costs (Alarie and Gamache, 2002). For ex-
ample, Ozdemir and Kumral (Ozdemir and Kumral,
2018) developed an agent-based Petri net simulation
model to check whether production targets are feasi-
ble and the extent to control the head grade in min-
eral processing by considering the uncertainties in the
mining operation. Xu et al. (Xu et al., 2019) devel-
oped an Approximate Dynamic Programming (ADP)
algorithm based on Q-Learning. The algorithm im-
plements two models: a static model and a dynamic
model. The static model allocates trucks to a loading
and an unloading job. The model employs an event-
driven method to define the stage when an idling truck
appears at any time (maybe more than one truck).
Bakhtavar and Mahmoudi (Bakhtavar and Mahmoudi,
2020) developed a two-phase scenario-based robust
optimization (SBRO) model by considering the max-
imization of production, control of ore grade sent to
the crusher, minimization of waiting times for trucks
and shovels, and trucks with different capacities.
Most of the reports on the truck dispatching prob-
lem in open-pit mines follow an allocation model, in
which the destination of a truck is determined when
it is required. Only a few publications have modeled
the problem as a scheduling problem, e.g., Chang et
al. (Chang et al., 2015) and Patterson et al. (Patterson
et al., 2017) proposed algorithms that generate an ini-
tial schedule, which is improved using a metaheuris-
tic method. Their results show that the algorithms
generate schedules for different size instances with
good results and performance in practical time frames
(for the mining industry). Icarte et al. (Icarte et al.,
2020) developed a multiagent system with agents rep-
resenting trucks and shovels. The agents interact with
each other to generate schedules. Their results show
that the MAS-TD provides schedules in practical time
frames and can handle environment dynamics.
3 MULTIAGENT SYSTEM FOR
TRUCK DISPATCHING IN
OPEN-PIT MINES
In the developed MAS-TD, the agents interact with
each other to generate schedules and to maximize the
production at minimum cost. Moreover, the agents
update the generated schedules when a major unfore-
seen event occurs at the mine. Table 1 shows the im-
plemented agents, their objectives, and properties.
3.1 Agent Interactions
In order to generate the schedules, the agents nego-
tiate among them by applying the improved Contract
Net protocol presented in (Icarte et al., 2020). In brief,
Application of Multiagent System and Tabu Search for Truck Dispatching in Open-pit Mines
161
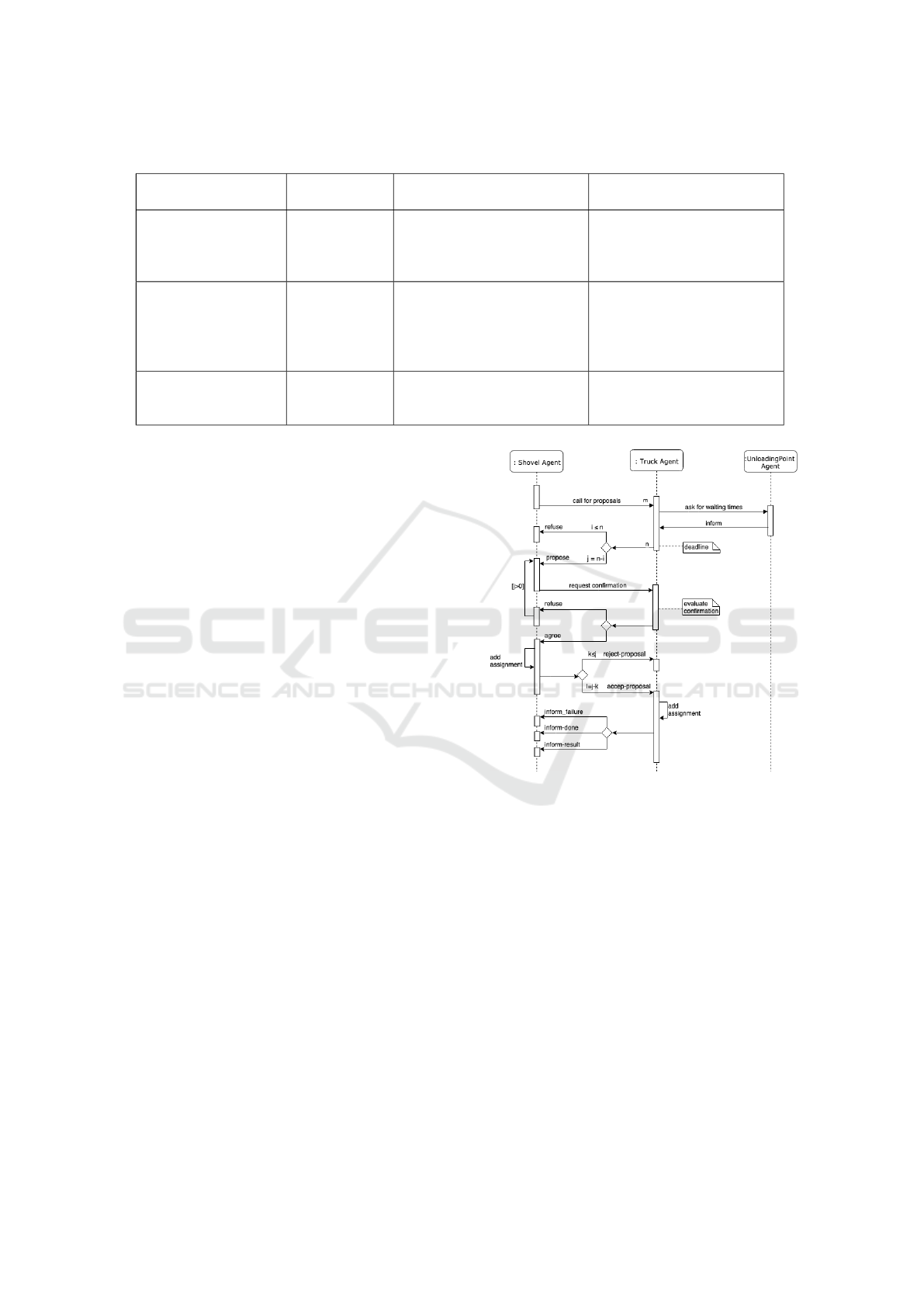
Table 1: Agent description. Adapted from (Icarte et al., 2020).
Agent Real-world
representation
Objective Properties
truckAgent Trucks Create a schedule of the
activities of the truck at
minimum cost
Capacity, loaded velocity,
empty velocity, spotting
time and unloading time,
layout of the mine
shovelAgent Shovels, front
loaders
Create a schedule of the
activities of the equipment
that it represents
considering its target in the
production plan
Capacity, dig velocity, load
velocity and the destination
of extracted material
unloadingPointAgent Crusher,
stockpiles,
waste dumps
Create a schedule of the
activities of the equipment
that it represents
Number of trucks unloading
simultaneously
the shovelAgents start negotiation processes sending
call-for-proposal (CFP) messages to truckAgents. In
the CFP the point of time is offered when the shovel
will be available for loading a truck. TruckAgents re-
spond with proposal messages pointing out the esti-
mated arrival time at the shovel and the cost of per-
forming all the operations involved. Finally, the shov-
elAgent selects the best proposal. The improved Con-
tract Net protocol enables the agents to manage con-
current negotiations. Figure 2 shows this Contract Net
protocol, and Table 2 shows a schedule example for a
truck generated by the agents by applying this proto-
col.
To manage the dynamics of the environment, the
agents follow a complete rescheduling strategy. This
means that the agents generate new schedules from
the point in time where an unforeseen event occur.
The agents cancel their assignments, and they interact
with each other to generate new schedules.
3.2 Decision Making
ShovelAgents must decide what is the best received
proposal. To make this decision, the shovelAgents use
the utility function proposed in (Icarte et al., 2020),
which promotes those proposals that decrease the
shovel’s waiting time and minimize the cost to per-
form the truck operations.
TruckAgents make two decisions. The first one is
deciding whether or not to send a proposal to a shove-
lAgent that sent a call-for-proposal message. To make
this decision, the truckAgent checks its schedule and
determines if there is a free time slot for the offered
time in the CFP. If yes, it calculates the total time to
perform all the operations and determines if it fits into
its schedule. If it does not fit into the schedule, it
sends a reject message. If it fits into the schedule,
it sends a proposal.
Figure 2: The interaction between the agents using the im-
proved Contract Net protocol with the confirmation stage.
Adapted from (Icarte et al., 2020).
The second one is to decide on whether or not to
confirm a previously sent proposal. To make this de-
cision, the truckAgent considers the shovel idle time
(informed by the requestConfirmation message sent
by the shovelAgent) and the negotiations which the
truckAgent is taking part in. If the shovel idle time is
higher or equal than one minute, the truckAgent sends
an acceptConfirmation message. If the shovel idle
time is less than one minute, the truckAgent checks if
it is taking part in another negotiation with more po-
tential benefit for the truck (i.e., with a lower cost to
perform the operations). If yes, the truckAgent sends
a refuseConfirmation message. Otherwise, it sends an
acceptConfirmation message.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
162

Table 2: Example of schedule created for a truck.
Assignment Destination Start
Time of
the Trip
Arrival
Time
Start
Time of
the
Spotting
Start Time
of the
Loading or
Unloading
End Time of
the
Assignment
0 Shovel.01 00:32:11 00:55:29 01:02:43 01:03:56 01:06:21
1 WasteDump.02 01:06:21 01:25:23 01:25:23 01:26:03 01:27:23
2 Shovel.04 02:11:24 02:20:27 02:30:35 02:31:10 02:34:29
3 WasteDump.03 02:34:29 02:56:18 02:56:18 02:58:28 03:00:25
4 Shovel.04 03:27:28 03:31:37 03:38:37 03:39:59 03:43:25
5 WasteDump.03 03:43:25 03:59:28 03:59:28 04:01:09 04:02:01
4 TABU SEARCH FOR TRUCK
DISPATCHING IN OPEN-PIT
MINES
Metaheuristics, particularly the Tabu Search (Glover,
1989), are commonly employed to overcome the
complexity of scheduling formulations, especially for
problems dealing with heterogeneous vehicle fleets
(Koc¸ et al., 2016). The Tabu Search algorithm ex-
plores neighborhoods to find improved solutions start-
ing from an initial solution. It uses knowledge (tabu
list) about recently visited solutions. The algorithm
rejects neighborhood moves that result in a solution
already in the tabu list to avoid cycling around local
optima. During the algorithm’s main loop, the best
neighborhood that is not in the tabu list is selected
and added to the tabu list. If it is the best solution
found so far, it is recorded as such. The algorithm
terminates after reaching a stop condition and returns
the best solution found.
Algorithm 1 implements the Tabu Search de-
scribed above. In lines 1-5, the initial setup of
the algorithm is done. In sBest the initial solution
provided by Disp-ALG (detail in subsection 4.1)
is stored, and is set as the current solution in best-
Candidate. Also, the tabu list is created and stored
in tabuList. The main loop starts in line 6. This
loop searches for a better solution until a time-out is
reached. In line 7, the function getNeighbors (best-
Candidate) generates new feasible solutions through
small changes in the stored solution in bestCandidate.
Changes in a solution are explained in subsection
4.2. Lines 8 - 13 look for the best candidate among
the neighbors that is not in the tabu list. If this
best candidate is better than the best solution found
so far, it is set as the best solution (lines 14-16).
The best candidate is added to the tabu list (line
17), and if the tabu list is full, the oldest element is
removed (line 18-20). Finally, when the stopTime is
reached, the algorithm returns the best solution found.
Algorithm 1: Tabu Search.
Input: executionTime
Output:
1: sBest ← DISP-ALG
2: bestCandidate ← sBest
3: tabuList ←
/
0
4: stopTime ← currentTime+executionTime
5: tabuList.push(sBest)
6: while currentTime<stopTime do
7: sNeighborhood ← GETNEIGH-
BORS(bestCandidate)
8: bestCandidate ← sNeighbor-
Hood.firstElement()
9: for sCandidate ∈ sNeighborHood do
10: if not (tabuList.contains(sCandidate))
and (fitness(sCandidate) > fit-
ness(bestCandidate)) then
11: bestCandidate ← sCandidate
12: end if
13: end for
14: if fitness(bestCandidate) > fitness(sBest)
then
15: sBest ← bestCandidate
16: end if
17: tabuList.push(bestCandidate)
18: if tabuList.size > maxTabuSize then
19: tabuList.removeFirst()
20: end if
21: end while
22: return sBest
4.1 Initial Solution
Disp-ALG builds feasible schedules for the equip-
ment involved in the material handling process. These
feasible schedules are used as the initial solution in
the Tabu Search algorithm presented above.
The main algorithm (Algorithm 2) consists of 3
steps: the first one looks for a shovel task defined as
(s, j, tll). The second step looks for the best truck t to
perform the shovel task. If the second step is suc-
Application of Multiagent System and Tabu Search for Truck Dispatching in Open-pit Mines
163
cessful, the algorithm proceeds with the third step,
which consists of adding the activities and times to
the schedules of the truck t and shovel s; otherwise,
the shovel task is discarded. These steps are repeated
until the last activity of the shovels exceeds the end of
the shift or the target in a production plan is achieved.
To determine whether these conditions are met, the
algorithm invokes the Boolean function isCondition-
sMeet. More details of Disp-ALG can be found in
(Icarte et al., 2020).
Algorithm 2: Disp-ALG.
Input: S, T, Plan, H
Output: shovelSchds, truckSchds
1: shovelSchds ←
/
0;truckSchds ←
/
0;
2: while not ISCONDITIONSMEET do
3: s, j,tll ← FINDJOB(S, shovelSchds, H)
4: if s not null then
5: T, act, act
0
←
FINDTRUCK(T, s, j, tll, truckSchds)
6: if t not null then
7: SCHEDULE(t,s,j,tll,shovelSchds,
truckSchds, act, act’)
8: end if
9: end if
10: end while
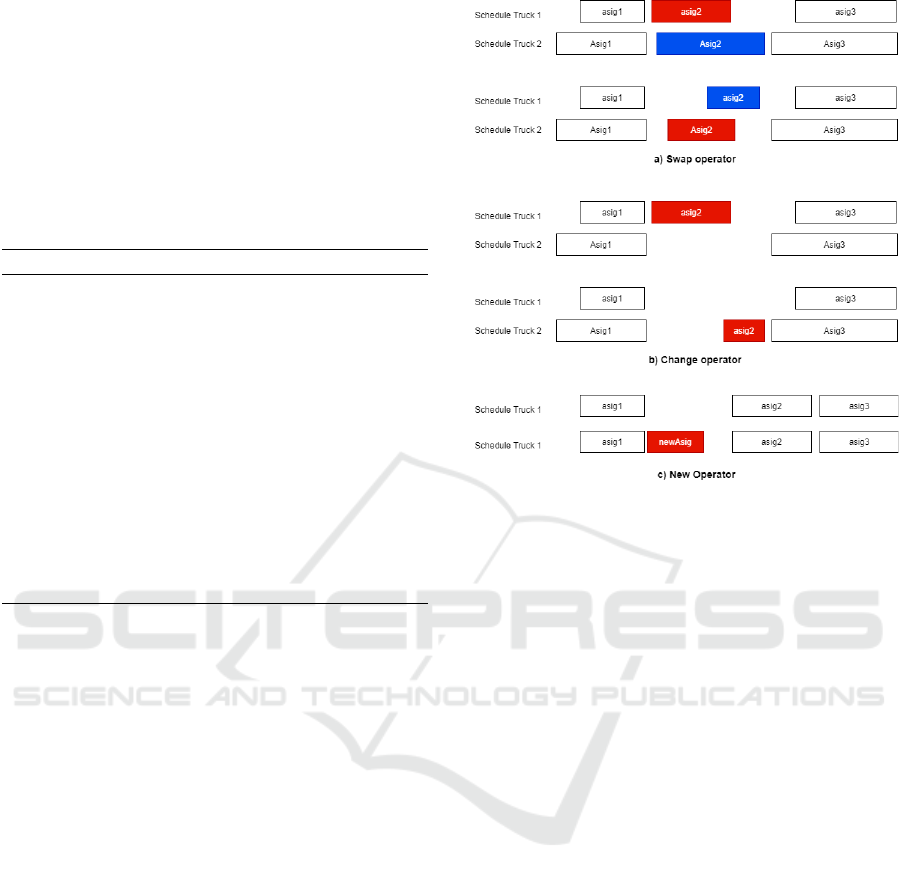
4.2 Neighborhoods
The solution space is explored by performing three
operators to generate neighborhoods from the initial
solution. Figure 3 shows examples of generated pos-
sible neighborhoods. The swap operator, shown in
Figure 3(a), generates the first one. The swap opera-
tor swaps two truck assignments, ignoring unfeasible
swaps. A feasible swap is only considered if the swap
decreases the cost to perform the assignments. The
second neighborhood, shown in Figure 3(b), is gener-
ated by the change operator. This operator moves an
assignment from one truck to another one only if the
second truck can perform the assignment in a shorter
time than the first truck. The new assignment opera-
tor generates the last neighborhood, shown in Figure
3(c). The new assignment operator adds a new assign-
ment by seeking a free time slot to perform a loading
operation in the shovel. Then it looks for a truck to
perform the loading operation.
To select the best neighborhood, an evaluation is
performed based on the efficiency of the schedules.
The ratio TotalMaterialToBeTransported / TotalCosts
determines the efficiency of schedules. The neighbor-
hood with the highest ratio is selected as the current
solution for an iteration in the Tabu Search algorithm.
Figure 3: Operators to generate neighborhoods.
5 EVALUATION AND
DISCUSSION
The evaluation aims to determine which method is
more appropriate to solve the truck dispatching prob-
lem in open-pit mines. To achieve this, the evaluation
compares the results obtained by applying the MAS-
TD and the Tabu Search procedure on simulated sce-
narios based on actual data.
The evaluation was split into two parts: the first
one considers the methods’ performance to generate
schedules. The second one considers how the meth-
ods react to the dynamics of the environment. The fol-
lowing output performance measures are compared in
the evaluation:
• Production: It is the total material transported by
the trucks during a shift. It is measured in tons.
• Costs: Because the actual data does not provide
information on costs such as operator salaries,
fuel costs, and maintenance costs, the truck travel
times are considered costs. They are measured in
hours.
• Required time to generate schedules: It is the
computation time that a method requires to gen-
erate schedules. It is measured in minutes.
• Hauling cost: The ratio between all the material
transported and all the costs to transport these ma-
terials. It is measured in tons per hour.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
164

5.1 Experimental Setup
In the evaluation, four simulated scenarios are used.
These scenarios are based on actual data from an
open-pit copper mine in Chile. The scenarios con-
sider different heterogeneous fleets of trucks and
shovels in twelve-hour shifts. Table 3 shows some
information about the simulated scenarios.
The actual data, such as velocities and capacities,
is used to set the properties of the agents. Table 4
shows the property sets of the agents. The simulations
ran in PlaSMA (Warden et al., 2010), which is an
agent-based event-driven simulation platform created
for the simulation and evaluation of multiagent sys-
tems. It focuses on simulating logistics processes and
is based on the FIPA-compliant Java Agent Develop-
ment Framework (JADE) (Bellifemine et al., 2007).
All simulations ran on a laptop computer with an In-
tel Xeon 3 Gigahertz CPU, 32 gigabytes of RAM, and
Windows 10.
5.2 Schedule Generation
The evaluation of the schedule generation was split
in two parts. The first one aimed to generate sched-
ules for maximizing the production. The second one
aimed to generate schedules considering a hypothet-
ical production plan. In both evaluations, the Tabu
Search procedure ran with different execution times
(5, 10, 15, and 20 minutes).
5.2.1 Schedule Generation for Maximizing
Production
Regarding computation time to generate the sched-
ules, both methods generated schedules in practical
frame times (for the mining industry). Figure 4 shows
the computation time of the methods to generate the
schedules for each shift. MAS-TD generated the
schedules in 20.48 minutes on average. The Tabu
Search procedure generated the schedules in 5, 10, 15,
and 20 minutes as it was pre-set. Also, Disp-ALG was
included in the comparison since it generates the ini-
tial schedules used by Tabu Search. Disp-ALG was
the fastest method to generate schedules. On aver-
age, Disp-ALG required 0,1 minutes to generate the
schedules.
Figure 5 shows the quantity of the material trans-
ported in the schedules generated by the methods.
Regarding production, the schedules generated by
Disp-ALG move the lowest quantity of material in
each of the four scenarios. After 20 minutes run-
ning time, Tabu Search improves the schedules gen-
erated by Disp-ALG by 0.76% on average. MAS-TD
Figure 4: Computation time to generate schedules of MAS-
TD, Tabu Search and Disp-ALG.
is the method whose schedules could move the high-
est amount of material. The activities in its schedules
transported 9.93% more material than the activities in
the schedules generated by Tabu Search.
Figure 5: Production of MAS-TD, Tabu Search and Disp-
ALG.
Figure 6 shows the costs of the generated sched-
ules by the methods for each shift. Regarding costs,
Tabu Search decreases the costs of the schedules gen-
erated by Disp-ALG by 0.92% on average. The
schedules generated by MAS-TD are more expensive
than the activities in the schedules generated by Tabu
Search by 4.59% on average. This is because the
MAS-TD generated schedules with more production,
and therefore more operations to be performed than
the schedules obtained by Tabu Search.
Figure 7 shows the efficiency of the generated
schedules by the methods for each shift. Regarding
the efficiency of the schedules, determined by the ra-
tio of total Material Transported / Costs, it is a little
bit higher in MAS-TD compared to the Tabu Search
and Disp-ALG, except for the shift 1 and 3, in which
the difference is higher. The generated schedules by
MAS-TD are more efficient than the ones obtained by
Tabu Search by 5.26% on average. Tabu search in-
Application of Multiagent System and Tabu Search for Truck Dispatching in Open-pit Mines
165
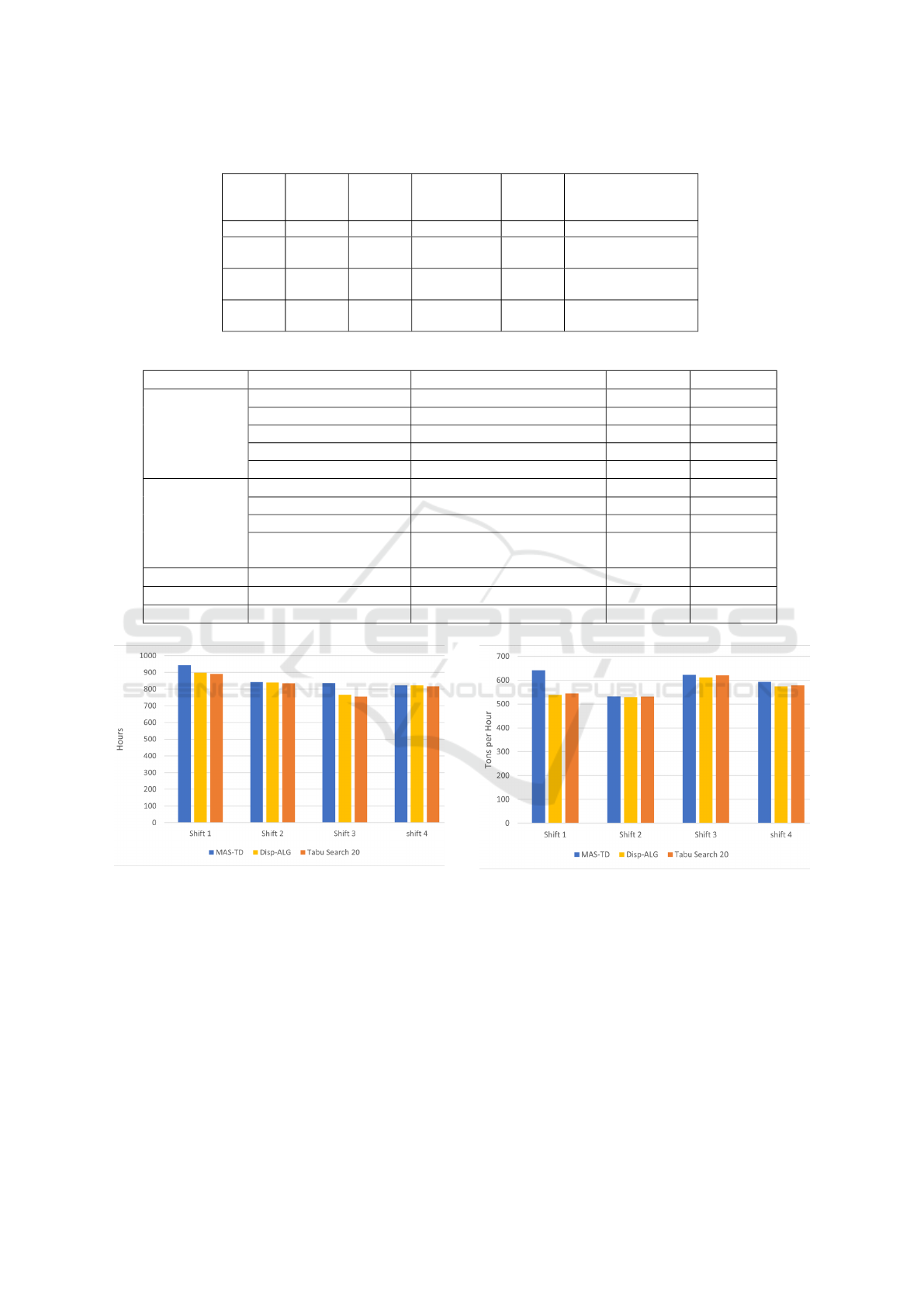
Table 3: Simulated scenarios.
Scenario
ID
Number
of
Trucks
Number
of
Shovels
Material
Transported
(tons)
Cost
(hours)
Brief Description
1 97 10 455.696,23 780,74 Highest production
2 102 12 378.069,92 772,84 Highest number of
trucks
3 95 13 325.899,61 757,62 Highest number of
shovels
4 96 12 394.759,09 791,59 Many events (truck
and shovel failures)
Table 4: Property values for the simulations.
Equipment Property Unit Min Value Max Value
Trucks
Velocity loaded [km/hr] 20 25
Velocity empty [km/hr] 40 55
Capacity [tons] 230 370
Spotting time [sec] 20 80
Current load [tons] 0 370
Shovel
Capacity [tons] 35 80
Load time [sec] 8 30
Dig time [sec] 8 20
Destination Location at mine (crusher,
stockpile or waste dump)
Crusher Equipment discharging [number of trucks] 1 1
Stockpile Equipment discharging [number of trucks] 1 20
Waste Dumps Equipment discharging [number of trucks] 1 20
Figure 6: Costs of MAS-TD, Tabu Search and Disp-ALG.
creases the efficiency of the generated schedules by
Disp-ALG through the improvement operations by
0.93% on average.
5.2.2 Schedule Generation with a Production
Plan
Differently from the previous evaluation, all methods
were set to achieve the targets of a production plan
at minimum costs. The production plan is based on
actual data. Figure 8 shows the computation time
of the methods to generate schedules for each shift.
Figure 7: Efficiency of the generated schedules by the meth-
ods for each shift.
Regarding computation times, the methods have the
same pattern as the previous evaluation (for maximiz-
ing the production). It means that Disp-ALG is the
fastest method to generate schedules, MAS-TD gen-
erates schedules in practical time frames (for the min-
ing industry), and Tabu Search generates the sched-
ules in 5, 10, 15, and 20 minutes as it was pre-set.
Compared to the previous evaluation, MAS-TD and
Disp-ALG generate the schedules in less time. This
is because the methods are set to achieve a lower pro-
duction level than in the previous evaluation.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
166
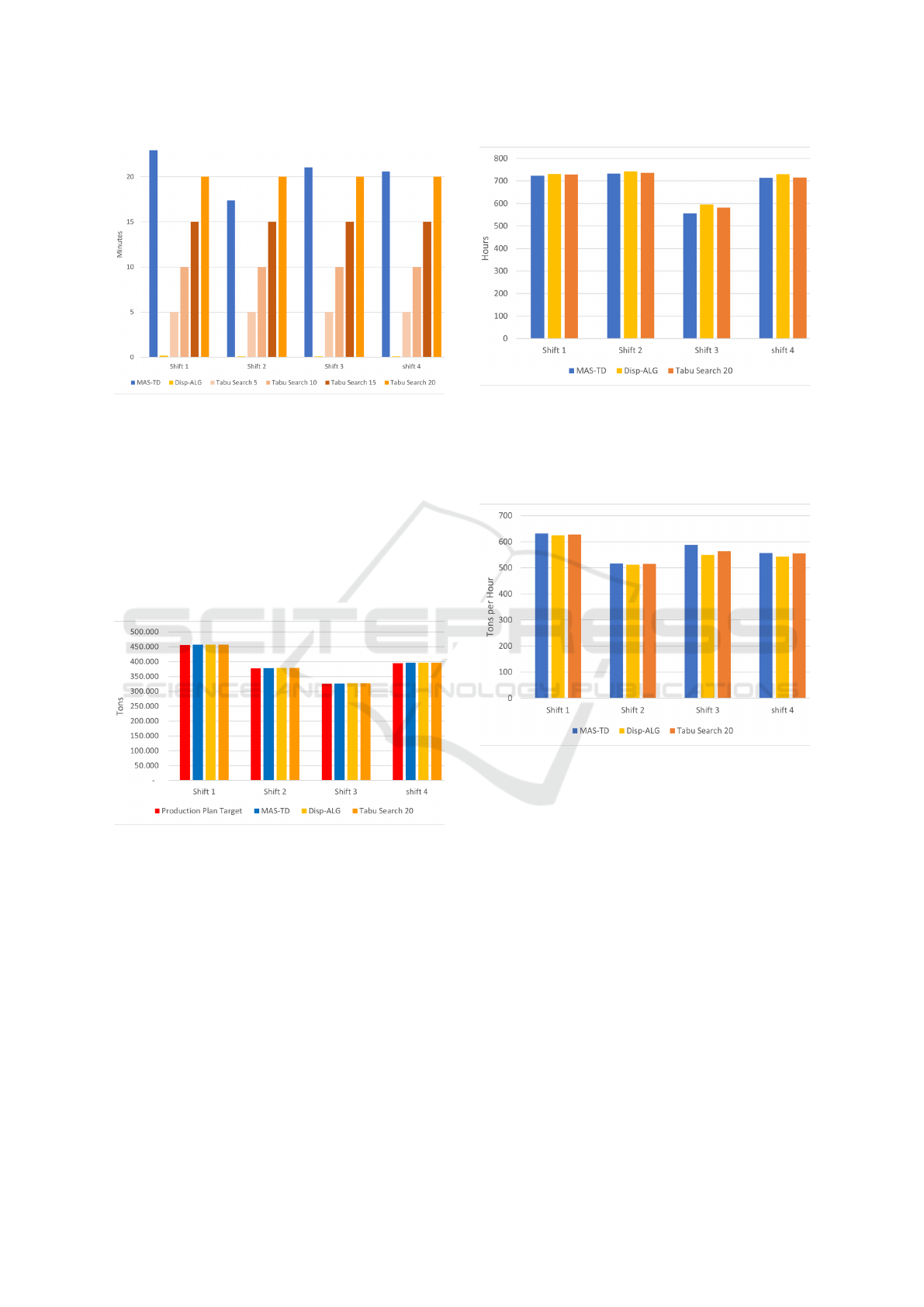
Figure 8: Computation time of the methods to generate
schedules (with production plan) for each shift.
Figure 9 shows the targets in the production plan,
and the production level reached for the methods for
each shift. Regarding production, all the methods
generate schedules that reach the production level in
the production plan. Due to the fact that generated
schedules by Disp-ALG reach the production level
pointed out in the production plan, Tabu Search does
not improve these schedules (from the perspective of
the production level).
Figure 9: Production level planed and production level
reached by the methods for each shift.
Figure 10 shows the costs of the generated sched-
ules by the methods for each shift. Regarding costs,
Tabu Search decreases the costs of the schedules gen-
erated by Disp-ALG by 1.44% on average. The costs
in the schedules generated by MAS-TD are lower than
the costs in the obtained schedules by Tabu Search by
1.32% on average.
Figure 11 shows the efficiency of the generated
schedules by the methods for each shift. Regarding
the schedules’ efficiency, it is a little bit higher in
MAS-TD compared to the efficiency of Tabu Search
and Disp-ALG. On average, the generated schedules
by MAS-TD are more efficient that the ones obtained
by Tabu Search by 1.39%. Tabu search increases the
Figure 10: Costs of MAS-TD, Tabu Search and Disp-ALG.
efficiency of the generated schedules by Disp-ALG
through the improvement operations by 1.46% on av-
erage. This increase in efficiency occurs due to the
reduction of the costs calculated by the Tabu Search.
Figure 11: Efficiency of generated schedules by MAS-TD,
Tabu Search and Disp-ALG.
5.3 Rescheduling
To evaluate rescheduling, only scenario four was
simulated, because in this scenario many equipment
items experience failures at different times during the
shift. In each event, the methods regenerate the sched-
ules from the moment when the event occurs. The
simulations evaluate the capacity of MAS-TD, Tabu
Search, and Disp-ALG to react when major events oc-
cur at the mine. Tabu search was set to run for five
minutes to get a quick solution. In this evaluation, the
production reached by the updated schedules and the
calculation time to update the schedules were com-
pared.
This evaluation compared two approaches. The
first approach is compound only by the MAS-TD,
which generates the schedules before the shift starts
and generates new schedules each time when an event
Application of Multiagent System and Tabu Search for Truck Dispatching in Open-pit Mines
167
occurs. The second approach is the compound of
Tabu Search and Disp-ALG. In this approach, before
the start of the shift, the schedules are generated by
Tabu Search. Then, for rescheduling, Disp-ALG is
used. Tabu search was not considered for reschedul-
ing because it takes too much time (5 minutes) to react
to the mine’s new conditions.
Regarding computation time to generate the ini-
tial schedules, the first approach (MAS-TD) required
around 20 minutes to generate the initial schedules.
The second approach (Disp-ALG and Tabu search)
was much faster and required a little bit more than
five minutes to generate the initial schedules.
Regarding the reaction to the dynamic of the en-
vironment, the results demonstrate the same previous
pattern: MAS-TD required more time to regenerate
all the schedules in comparison to the DISP-ALG.
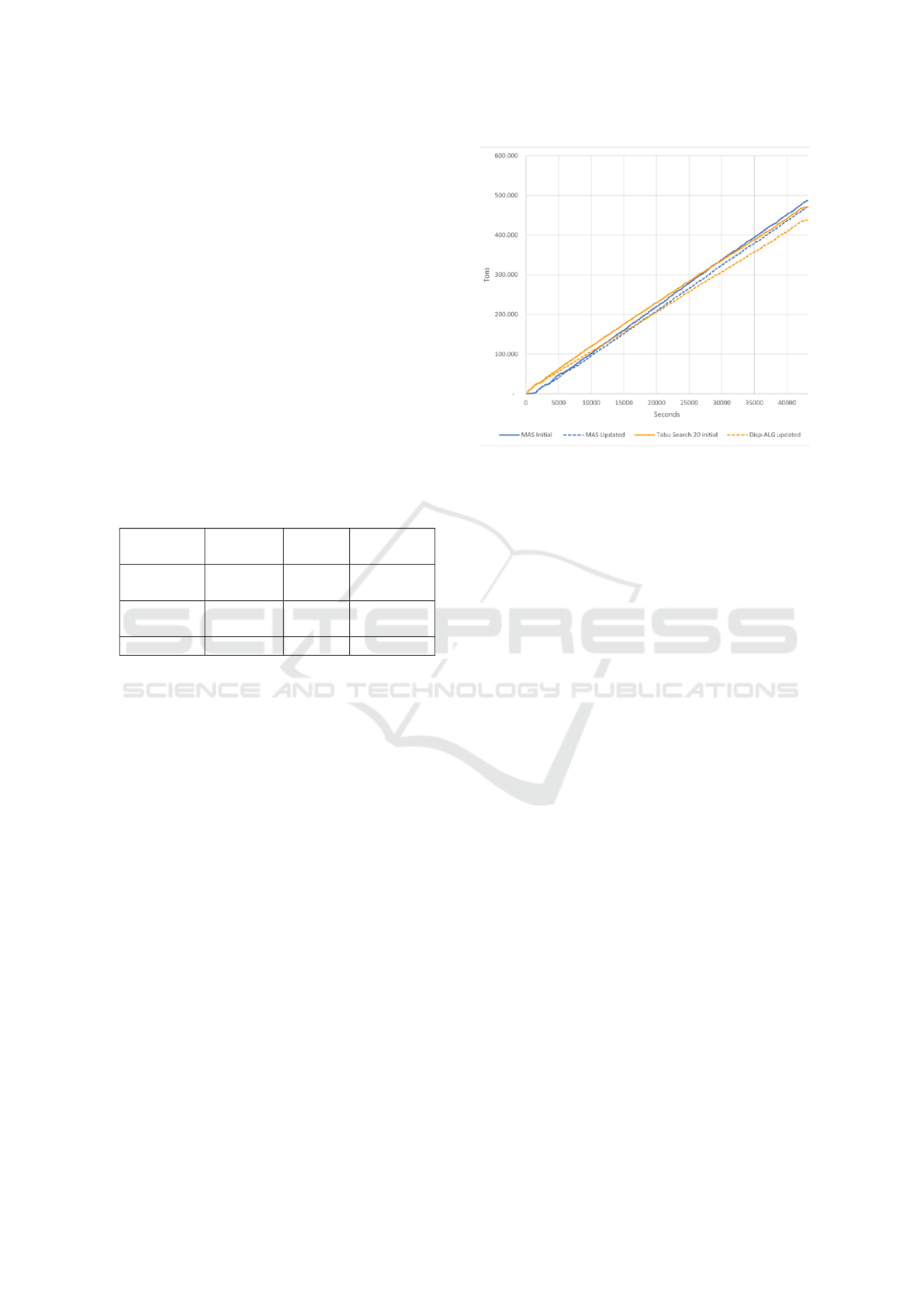
Table 5 shows some computation time to update the
schedules at different moment in the shift.
Table 5: Computation time to update the schedules.
Time in
the shift
MAS-TD TS5 Disp-ALG
At the
beginning
0:18:15 0:05:00 0:00:05
In the
middle
0:10:33 0:05:00 0:00:03
At the end 0:03:46 0:05:00 0:00:02
Regarding production, Figure 12 shows the accu-
mulated production during the shift for each method.
The filled lines represent the planned production
pointed out in the initially generated schedules. Dot-
ted lines represent the reached production in the up-
dated schedules. The graph shows that the methods
can update the schedules when major events occur at
the mine. However, the schedules updated by MAS-
TD achieve significantly more production (7.19%)
than Disp-ALG.
6 DISCUSSION
The results demonstrate that MAS-TD, Tabu Search
and Disp-ALG can generate schedules within reason-
able time frames (for the mining industry) whether it
is for maximizing the production or within the target
of a production plan. While Disp-ALG takes only a
few second to generate the schedules, MAS-TD re-
quired around 20 minutes for the scenarios simulated.
The Tabu search computation time depends on the
execution time pre-set as parameter. However, it is
important to mention that the MAS-TD computation
time could be reduced to seconds by employing more
Figure 12: Accumulated production with major events dur-
ing the shift by original and updated schedules.
cores as the MAS-TD architecture lends itself to con-
current computation tasks.
From the perspective of the production tasks, the
schedules generated by the MAS-TD achieve a higher
production rate than the generated schedules by Tabu
Search and Disp-ALG. This is also the case for the
efficiency of the schedules. The better results in the
scheduling solution provided by the MAS-TD are due
to the fact that the matching between a shovel task and
a truck is more precise: The Tabu Search starts the im-
provement of the schedules generated by Disp-ALG,
and Disp-ALG follows a sequential creation of the
schedule: it looks for the best truck for a shovel task
and then continues with the following shovel task.
However, this selected truck may be more appropri-
ate for another shovel task. This may cause an inef-
ficient use of the trucks leading to a lower quality of
the schedules. The MAS-TD avoids this situation be-
cause of the concurrent negotiation mechanism. The
mechanism allows for a shovelAgent to decide on the
most appropriate truck’s proposal. Also, a truckAgent
can confirm, or choose to not confirm a previously
sent proposal to a shovelAgent with high idle time.
This allows for a more precise match between shov-
els and trucks.
Considering the results of cost when the methods
generated schedules with a production plan, the costs
of the schedules generated by MAS-TD were a little
bit lower (1.32%) than the costs generated by Tabu
Search. This happens due to the fact that truckAgents
have the chance to select a shovel with a lower cost.
Disp-ALG also looks for a truck to perform the opera-
tions for a shovel in the shortest time. However, when
it finds it, there is no chance of changing it in the fu-
ture, i.e., if there is another shovel task with less time,
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
168
it is not possible to change it. Tabu search might find
this improvement and make the change, but it might
take time to find it.
Regarding rescheduling, MAS-TD, Tabu Search,
and Disp-ALG can update schedules when major
events occur at the mine. However, the produc-
tion results and the needed computation time that the
methods take to generate the schedules differs among
them. Disp-ALG is the fastest method to update the
schedules; however, its schedules are the worst in
terms of production rates compared to the generated
schedules by MAS-TD and Tabu Search.
In the simulation, MAS-TD applied a reschedul-
ing strategy for the complete schedule because it aims
at the maximum production level. This strategy takes
much more time than the time required by Disp-ALG
(as is shown in Table 5), because it generates all the
schedules from scratch. However, some assignments
can be made within a short time frame, due to two
reasons: first, the algorithms that generate the sched-
ules in MAS-TD are anytime algorithms, i.e., they can
be stopped at any time, and still will generate a fea-
sible schedule solution. Second, the negotiation pro-
cess is fast and many assignments can be computed
within a few seconds. This allows the fleet to con-
tinue working based on a preliminary generated as-
signment, while MAS-TD continues to generate the
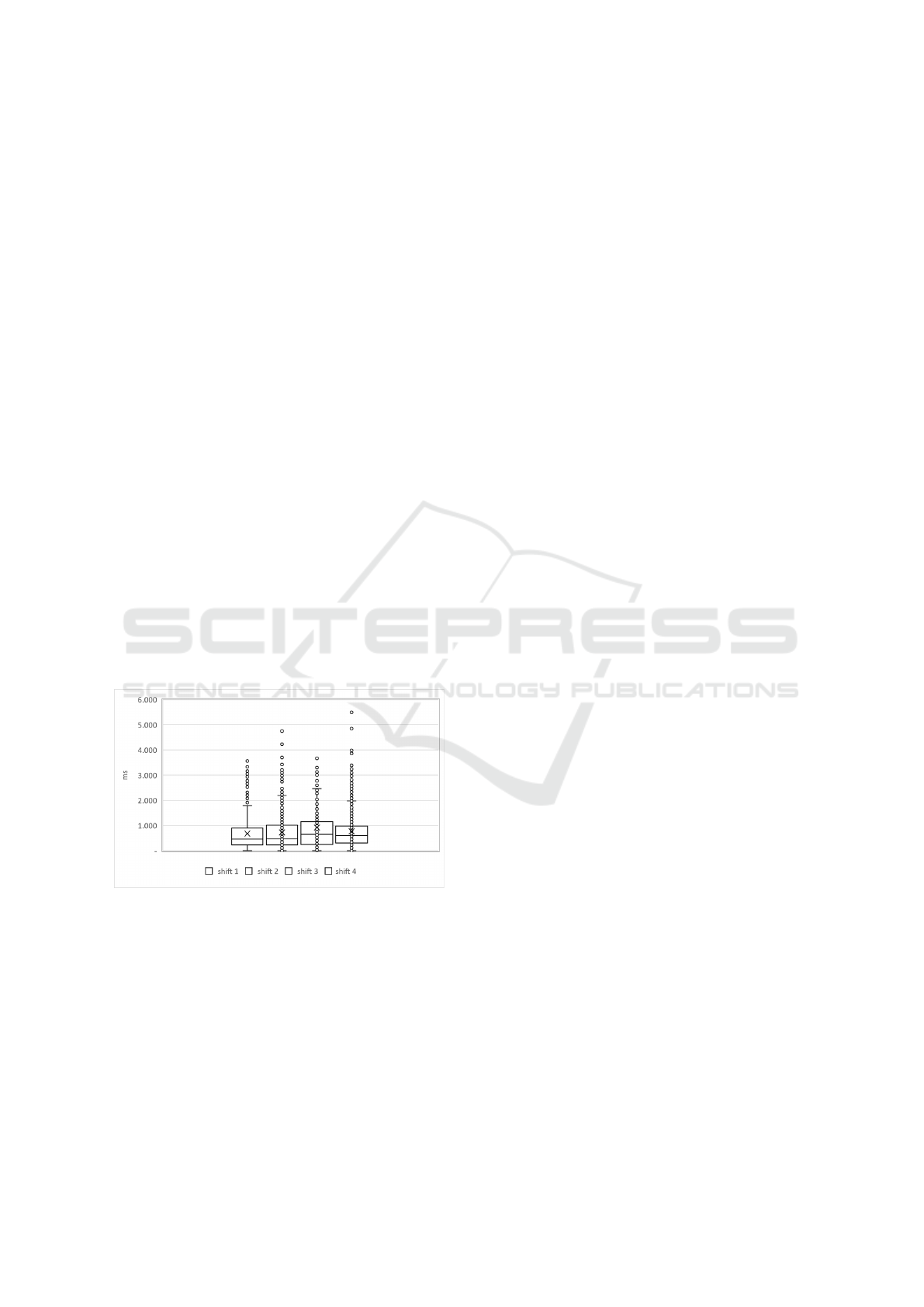
schedules. Figure 13 shows that most of the success-
ful negotiations, i.e., assignments computed, are done
in less than one second in all scenarios.
Figure 13: Box and whiskers diagram shows that the mean
of the duration of the successful negotiations is around 0.5
seconds.
7 CONCLUSIONS
A major process in open-pit mines is material han-
dling. In this process, dispatching a truck becomes a
complex decision because of the stochasticity of the
process and the dynamics of the environment. In gen-
eral, a centralized system supports this process. As
an alternative to currently used systems, we present
a multiagent system (MAS-TD) with agents that rep-
resent real world equipment items. In addition, the
agents can react to the dynamics of the mine envi-
ronment and generate new schedules when equipment
items encounter failures.
To evaluate the proposed MAS, we compare it
against a Tabu Search procedure. Our results demon-
strate that the MAS-TD is a more appropriate method
than the Tabu Search procedure to solve the truck
dispatching problem in open-pit mines, because the
MAS-TD generates more efficient schedules than the
Tabu Search procedure. In addition, when critical
events occur in the mine environment, the MAS-TD
regenerates its schedules and achieves a higher pro-
duction than the schedules generated by Tabu Search
and regenerated by Disp-ALG.
In our further research, we will consider more sce-
narios that include other events such as shovel and
truck delays. To decrease the time needed by MAS-
TD for rescheduling, we will evaluate a partial regen-
eration of the schedules.
REFERENCES
Adams, K. K. and Bansah, K. K. (2016). Review of Op-
erational Delays in Shovel-Truck System of Surface
Mining Operations. In 4th UMaT Biennial Interna-
tional Mining and Mineral Conference, pages 60–65,
Tarkwa, Ghana.
Alarie, S. and Gamache, M. (2002). Overview of Solu-
tion Strategies Used in Truck Dispatching Systems
for Open Pit Mines. International Journal of Surface
Mining, Reclamation and Environment, 16(1):59–76.
Bakhtavar, E. and Mahmoudi, H. (2020). Development of
a scenario-based robust model for the optimal truck-
shovel allocation in open-pit mining. Computers and
Operations Research, 115(March 2020):104539.
Bellifemine, F., Caire, G., and Greenwood, D. (2007). De-
veloping Multi-Agent Systems with JADE. John Wiley
& Sons, Chichester, UK.
Chang, Y., Ren, H., and Wang, S. (2015). Modelling and
optimizing an open-pit truck scheduling problem. Dis-
crete Dynamics in Nature and Society, 2015:745378.
Costa, F. P. D., Souza, M. J. F., and Pinto, L. R. (2005). Um
modelo de programac¸
˜
ao matem
´
atica para alocac¸
˜
ao
est
´
atica de caminh
˜
oes visando ao atendimento de
metas de produc¸
˜
ao e qualidade. Rem: Revista Escola
de Minas, 58(1):77–81.
Glover, F. (1989). Tabu Search - Part I. Orsa Journal on
Computing, 1(3):190–206.
Icarte, G. and Herzog, O. (2019). A multi-agent system for
truck dispatching in an open-pit mine. In Lottermoser,
B., editor, Abstracts of the Second International Con-
ference Mines of the Future 13 & 14 June 2019,
Institute of Mineral Resources Engineering, RWTH
Aachen University, Aachen, Germany. Verlag Mainz.
Application of Multiagent System and Tabu Search for Truck Dispatching in Open-pit Mines
169

Icarte, G., Rivero, E., and Herzog, O. (2020). An Agent-
based System for Truck Dispatching in Open-pit
Mines. In Rocha, A., Steels, L., and van den Herik,
J., editors, Proceedings of the 12th International Con-
ference on Agents and Artificial Intelligence - Volume
1: ICAART, pages 73–81, Valleta, Malta. SciTePress.
Koc¸, C¸ ., Bekta, T., Jabali, O., and Laporte, G. (2016). Thirty
years of heterogeneous vehicle routing. European
Journal of Operational Research, 249(1):1—-21.
Krzyzanowska, J. (2007). The impact of mixed fleet hauling
on mining operations at Venetia mine. Journal of the
Southern African Institute of Mining and Metallurgy,
107(4):215–224.
Liao, T. W., Chang, P. C., Kuo, R. J., and Liao, C. J.
(2014). A comparison of five hybrid metaheuristic
algorithms for unrelated parallel-machine scheduling
and inbound trucks sequencing in multi-door cross
docking systems. Applied Soft Computing Journal,
21(2014):180–193.
Newman, A. M., Rubio, E., Caro, R., Weintraub, A., and
Eurek, K. (2010). A review of operations research in
mine planning. Interfaces, 40(3):222–245.
Ozdemir, B. and Kumral, M. (2018). Appraising produc-
tion targets through agent-based Petri net simulation
of material handling systems in open pit mines. Simu-
lation Modelling Practice and Theory, 87(2018):138–
154.
Patterson, S. R., Kozan, E., and Hyland, P. (2017). Energy
efficient scheduling of open-pit coal mine trucks. Eu-
ropean Journal of Operational Research, 262(2):759–
770.
Warden, T., Porzel, R., Gehrke, J. D., Herzog, O., Langer,
H., and Malaka, R. (2010). Towards Ontology-
Based Multiagent Simulations : Plasma Approach. In
Bargiela, A., Azam Ali, S., Crowley, D., and Kerck-
hoffs, E. J., editors, Proceedings of the 24th Euro-
pean Conference on Modelling and Simulation, ECMS
2010, pages 50–56, Kuala Lumpur, Malaysia.
Xu, T., Shi, F., and Liu, W. (2019). Research on Open-
pit Mine Vehicle Scheduling Problem with Approxi-
mate Dynamic Programming. In 2019 IEEE Interna-
tional Conference on Industrial Cyber Physical Sys-
tems (ICPS), pages 571–577, Taipei, Taiwan. IEEE.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
170
