
Formal Validation for Natural Language Programming
using Hierarchical Finite State Automata
Yue Zhan and Michael S. Hsiao
Bradley Department of Electrical and Computer Engineering,
Virginia Tech, Blacksburg, VA 24060, U.S.A.
Keywords:
Natural Language Programming, Natural Language Processing, Formal Validation, Hierarchical Finite State
Automata.
Abstract:
Natural language programming (NLPr) is a sub-field of natural language processing (NLP) that provides a
bridge between natural languages (NL) and programming languages (PL), allowing users to design programs
in the form of structured NL documents. Due to the imprecise and ambiguous nature of NL, it is essen-
tial to ensure the correctness of translation for critical applications where errors are unacceptable. Machine
learning-based approaches for error checking are insufficient as it can be difficult for even the most sophisti-
cated models to capture all the relevant intricacies of a natural language. Automata offer a formalism that has
been used in compiling programming languages, and this paper extends automata-based methods to validating
programs written in natural languages. In particular, we propose a hierarchically structured finite-state automa-
ton, modeled based on domain-specific knowledge, for NLPr input validation and semantic error reporting.
Experimental results from validating a set of collected NL sentences show that the proposed validation and
error reporting can catch the unexpected input components while validating the semantics.
1 INTRODUCTION
Natural languages (NL) serve as the primary ex-
change of information among humans. Increasingly,
NL is also becoming a key interface in the field of
human-computer interaction. Natural language pro-
gramming, an approach in which a computer program
is constructed from NL, holds exciting promises of
lowering the barrier to entry for programming and en-
abling new forms of interaction with devices.
Designing a system that understands NL and gen-
erates the corresponding code is challenging due to
the massive amount of language features that the sys-
tem must be able to interpret correctly. For example,
users might give an NLPr system an input containing
lexicon, grammar, or sentence structure that the sys-
tem was not intended to handle or accept. Statistical
n-gram language models are popular in the field of
information extraction (IE) because of their forgive-
ness and robustness compared to rule-based gram-
mars. However, such forgiveness might cause the loss
of some semantics, thus making the NLPr system brit-
tle (Kaiser et al., 1999). For example, in an n-gram
based NLPr system where forgiveness and robustness
are achieved by dropping unknown words in the in-
put and where the words “love” and “hate” are un-
known, the three sentences below will all result in the
same output program. This treatment is undesirable
to a human as the three inputs clearly have different
meanings.
The robot loves going forward.
The robot hates going forward.
The robot goes forward.
One way to avoid translating with errors is to en-
sure that the NLPr system is able to accept, or re-
ject, any sentence fully it receives as input, as op-
posed to statistically process the sentence as in ma-
chine learning based systems. Accepting a sentence
can be performed by using a formal validation method
to screen out invalid inputs. Such a formal validation
method must detect unknown words/phrases, missing
information, as well as words and phrases that are
not compatible with the problem domain of the target
programs. Whenever an invalid sentence is detected,
the formal validation engine should provide feedback,
and “debug” suggestions to help users fix their pro-
grams.
Finite-state machines (FSM) have played a sig-
nificant role in both traditional and modern natural
language processing (NLP) applications such as IE
506
Zhan, Y. and Hsiao, M.
Formal Validation for Natural Language Programming using Hierarchical Finite State Automata.
DOI: 10.5220/0010388905060515
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 1, pages 506-515
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
and natural language parsing (Manning and Sch
¨
utze,
1999). In language processing, an FSM is an ab-
stract machine with a finite number of states where
the transition from one state to another is made ac-
cording to a predetermined set of coded instructions
as a sequential transducer (Rangra and Madhusudan,
2016). At each state, the next state is determined by
the next input token in the sequence to select a rel-
evant FSM path. FSMs serve as a powerful formal
validation mechanism due to their deterministic prop-
erties, generating robust semantic representations that
can lead to less error-prone results for NLPr systems.
The correctness of the input processing and transla-
tion is critical for NL-based robot program synthesis.
In addition, in the event that a user inputs NL sen-
tences that the system is unable to process, we need
to provide users useful and easy-to-understand feed-
back in order for the users to rectify their inputs. For
example, in Figure 1, the token “randomly” brings the
system to the error state from S
3
because the word is
not covered in the system’s lexicon. If the system sim-
ply terminated at this line without providing any error
messages, it would leave the users no clue about how
to fix the problem. In fact, an NLPr system that does
not provide useful feedback is difficult to use for non-
expert users, negating much of the appeal of NLPr.
In order to validate input sentences and report pos-
sible errors, the system must not only parse the sen-
tences into their constituent words, necessary for gen-
erating expressive language intermediate representa-
tions for downstream processing. It must also identify
unknown words and phrases in sentences that are not
covered in the language model, thus avoiding possi-
ble misinterpretations. In this paper, we address the
challenge of semantic parsing and input sentence val-
idation by implementing a context-sensitive analysis
engine. An automaton can be used to validate an NL
sentence by checking the end state reached by the sen-
tence. If the accept state is reached at the end of
the sentence, then the sentence is valid. On the other
hand, if the automate ends in the error state, then the
sentence contains unknown or unexpected language
components or missing some of the expected infor-
mation. Different error messages can be generated
depending on exactly how the error state was reached.
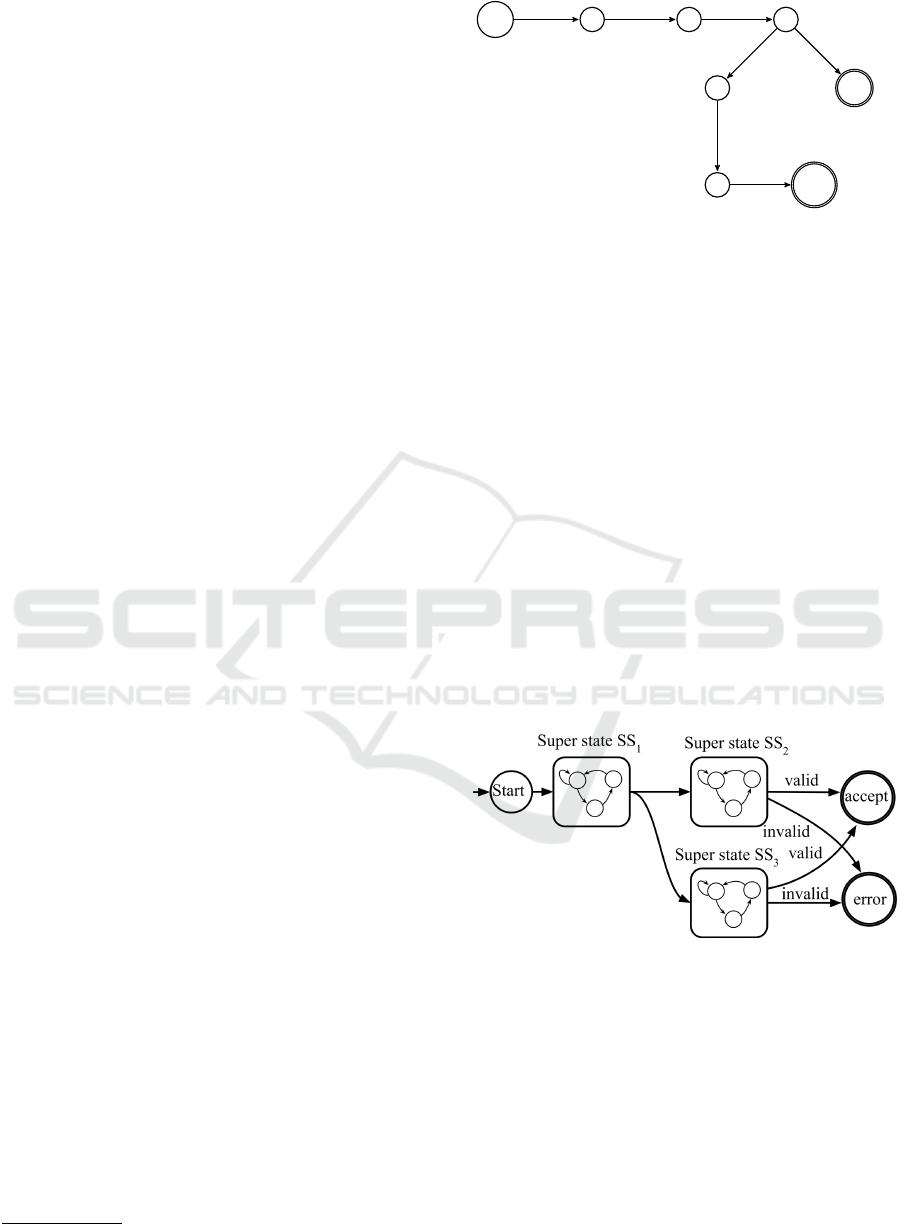
However, modeling all language features into one
modular FSM-based system is a complicated and
challenging process, resulting in a hard-to-maintain
system. A hierarchically structured machine can re-
duce the complexity of the system by breaking the
state machine into several superstates, denoted as SS
i
in this paper, where SS
i
∈ SS, 1 ≤ i ≤ m, as shown in
Figure 2. A superstate represents a cluster of one or
1
Stands for “end of sentence”
Start
S
1
S
2
S
3
S
4
S
6
accept
error
NP : robot
V P : go
AP : dir
CD : num
AP : randomly
NP : unit
EOS
1
Figure 1: Example FSM.
more substates, noted as S
x
, where S
x
∈ S, 1 ≤ x ≤ n,
as in Figure 1. Such a structure makes it possible to
view the validation system at different levels of ab-
straction, making the system easier to reason about
and makes it possible to specify the system more in
detail (Alur and Yannakakis, 1998). Such a hierarchi-
cal structure also simplifies the addition of new lan-
guage features to the model, allowing new features
to be added without modifying all other states’ previ-
ous transition conditions. The hierarchical structure
also allows us to reuse states when transitioning be-
tween the super states. For example, as shown in Fig-
ure 4, the sensor-related states are reused by the robot
superstate SS
1
. Finally, although hierarchical FSMs
have played important roles in handling non-terminal
nodes in a Context-Free Grammar (CFG), they can-
not be easily extended to handle ambiguity in a lan-
guage. In this paper, we present a hierarchical FSM
for formal validation of inputs and error reporting for
the task of robot navigation using NLPr.
Figure 2: Example HFSM.
2 RELATED WORK
Finite-state automata are widely used in several sta-
tistical NLP tasks such as lexical analysis, tokeniz-
ing, part-of-speech (POS) tagging, and sentence pars-
ing. In (Rangra and Madhusudan, 2016), the authors
proposed a Modular Finite State Automa (MFSA) for
sentence grammar validation based on POS. Their
MFSA recognized the validity of token combinations
in the sentence and built the parse tree in a bottom-
Formal Validation for Natural Language Programming using Hierarchical Finite State Automata
507

up manner after completing all modular validations.
This approach reduced repeat parsing by using sub-
modules based on grammatical categories. However,
this MFSA did not address issues like ambiguity res-
olution.
An FSM-based parser application is presented in
(Graham and Johnson, 2014) for parsing Internet pro-
tocols. The authors claim that FSM approaches are
straightforward to construct and maintain and that
they are sufficiently expressive for high-throughput
applications like Internet protocols. This stands in
contrast to the previously dominant belief that FSMs
are not scalable or expressive and that they take too
much time actually to implement. This work demon-
strated that the integration of domain-specific knowl-
edge into an FSM is feasible.
A hybrid FSM framework that combines the ben-
efit of spell checking and machine translation ap-
proaches is presented in (Beaufort et al., 2010). It per-
forms NL SMS text normalization, converting noisy
SMS conversations to a more standardized form. The
major drawback of training the model using SMS text
is that building a machine that can transcribe the cor-
pora to standard written forms is difficult due to the
significant variation present in SMS conversations.
As such, the authors stated that future works using
similar approaches should be based on text with a
more rigid structure than SMS messages.
Finite state-based compiler toolkits like Foma
(Hulden, 2009) and OpenFst (Allauzen et al., 2007)
also embrace the formal analysis power of statistical
finite state techniques.
Finite-state methods are also leveraged in the
fields of machine learning and Neural Machine Trans-
lation (NMT). A deterministic pushdown transducer
(DPDT) is adopted in (Moisl, 1992) for general NLP,
and a simple recurrent neural network is trained to
simulate a finite state automaton. The authors demon-
strate that using such NN-based implementation re-
sults in a system that can meet a typical NLP system’s
desirable properties for language parsing.
In (Goyal et al., 2016), neural language models
are used to regularize finite state machines with a
character-level model for NL text generation. The
weighted finite-state automaton proposed in this pa-
per incorporates prior knowledge to guide an RNN to
generate valid and well-formed character sequences.
In the works (Stahlberg et al., 2019)(Yuan et al.,
2019), the authors use finite-state transducers that are
built from unlabeled corpus to constrain the output of
a neural beam decoder to solving Grammatical Er-
ror Correction (GEC) tasks in NLP. They claim that
these methods can also be used with statistical ma-
chine translation (SMT) approaches if training data
is available, and they report superior gains over SMT
baselines. Their work suggests that finite state tech-
niques can enrich the search space of possible gram-
matical errors and corrections and constrain the neural
GEC system.
3 THE PROPOSED
CONTEXT-SENSITIVE
HIERARCHICAL FSM (HFSM)
Our approach to semantic parsing is to transform
an NL input into an intermediate semantic represen-
tation with domain-specific information. Semantic
parsing for general NL inputs can be difficult due to
the underlying text’s imprecision and ambiguity. In
a LEGO robot NLPr application (Zhan and Hsiao,
2018)(Zhan and Hsiao, 2020), the lexicon and the
domain-specific function library F is built upon the
functionalities allowed by the hardware and sentences
manually collected from users that describe robot
movements. We restrict the application domain to be
the LEGO EV3 robot and constrain the language to
be a semi-controlled natural language (CNL) (Kuhn,
2014). By restricting the NLPr system’s problem do-
main to LEGO robot program synthesis, the problem
of semantic parsing can be modeled into a domain-
specific context-sensitive FSM. Such a machine per-
forms semantic checking and validation on a subset
of NL, e.g., a semi-controlled natural language. The
object-oriented language style also helps to reduce
ambiguity in sentences, as each phrase must involve
an object.
Unlike conventional programming languages that
are precise and unambiguous by design, we must deal
with NL inputs that could be imprecise and ambigu-
ous. Parsing an NL sentence into the grammatical
form using a grammar that ignores context, such as
CFG, might cause the loss of semantic information
and other problems. Even though modeling all lan-
guage features into one single NLPr system is imprac-
tical, if not impossible, the task can be made easier by
restricting the lexicon and language features to a fi-
nite size, such as the lexicon describing robot tasks.
With this domain-specific knowledge-based lexicon
and library, the ambiguity and imprecision in the in-
put NL texts can be mitigated. Therefore, instead
of fully encoding the NL sentences into an abstract
form, some particular categories are kept and mapped
based on the library, while others may be dropped.
Words that the system does not care about, such as
“a”, “the”, “that” are dropped from the input. For ex-
ample, the sentence “The robot turns on the LED in
NLPinAI 2021 - Special Session on Natural Language Processing in Artificial Intelligence
508
red” is pre-processed to “robot turns on LED PREPO-
SITION RED.”, keeping the sentence structure as well
as the subjects and properties of the action, such as the
color RED in this example.
3.1 Construction of the HFSM
In order to validate NL texts fed into the NLPr system
and detect sentence components, we propose a hier-
archical FSM with a semantic checking mechanism.
The hierarchical FSM is constructed based on basic
English grammar, the domain-specific lexicon, and li-
braries of the LEGO robot application. The FSMs
are developed based on a set of NL sentences that de-
scribe the capabilities of the robot. The first super-
state handles the initial transitions to other superstates
by detecting the objects and actions in a sequence of
word tokens. We define nouns, verbs, and preposi-
tions based on POS tagging of the input sentences, us-
ing the Penn Treebank standard (Taylor et al., 2003),
and denote the following word classes:
• NP: Noun and noun phrases. For example: the
robot, sensors, LED, servo, etc.
• VP: Verb. For example: turn, move, delay, etc.
• AP: Adjective, Adverb. For example: colors, di-
rections, etc.
• PP: Preposition, preposition phrases. For exam-
ple: in, on, from, to, etc.
There are some exceptions to these classes, includ-
ing the following: the customized object names are
treated as NP, declared variable names are treated as
NP. For example, the happy in the sample sentence
“The robot is happy.” is treated as a Boolean variable.
The exception treatment treats random variable names
as NP as well, as in sentences such as “The robot is
variable xyz.”. Grammatical faults like this are for-
given in the FSM-based parsing system. Each FSM
has one start state and two terminal states: accept and
error.
In the figures, circles represent states, denoted as
S
x
, and rounded rectangles represent superstates de-
noted as SS
i
. Arrows denote the transition from one
state to another, with the label denoting the token that
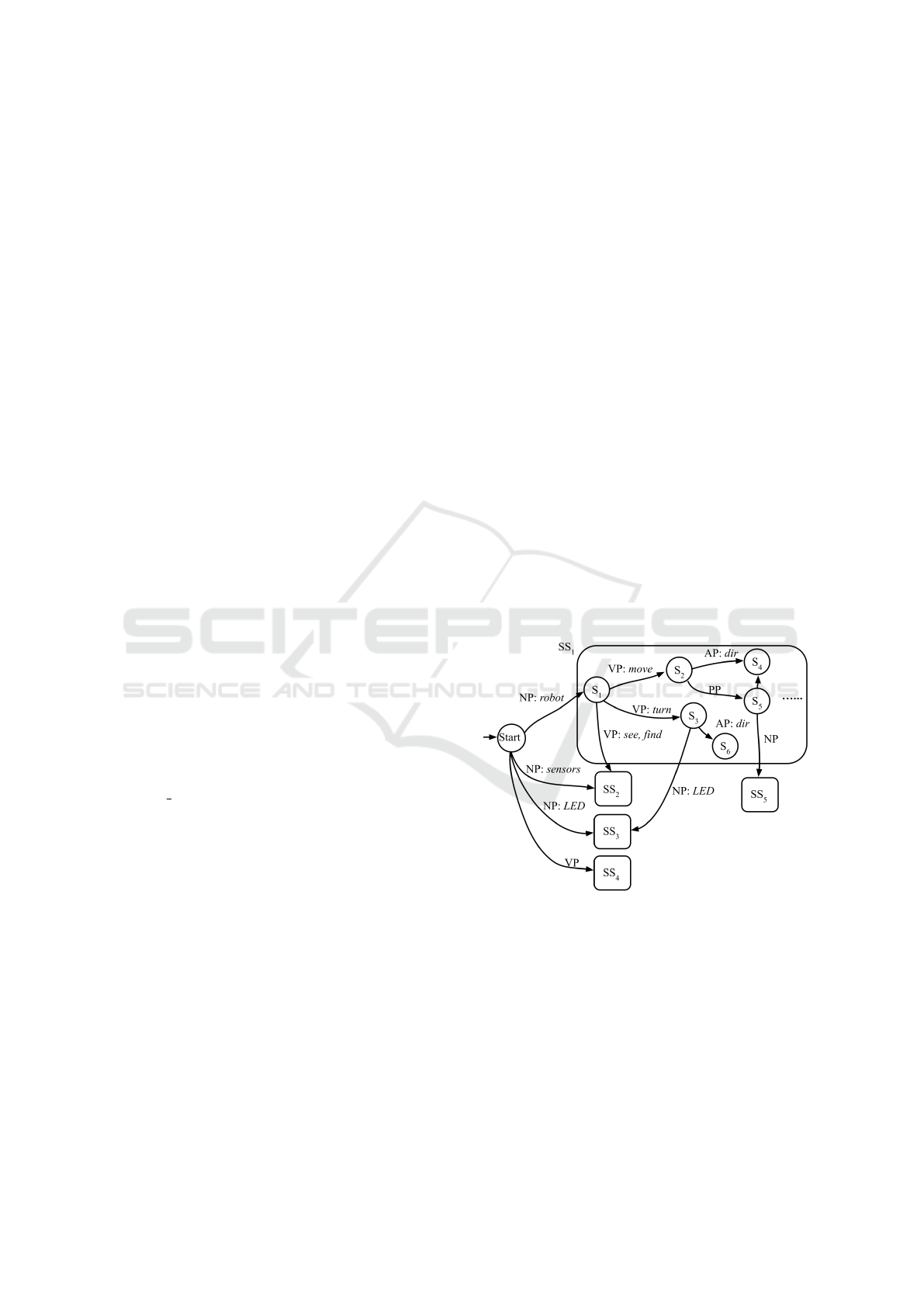
triggered that transition, as shown in Figure 3. The
ordering of tokens in the input holds important infor-
mation about the sentence’s meaning, and the HFSM
can account for this. Depending on the ordering of to-
kens in a sentence, the HFSM may transition between
superstates in a different order, thus parsing the con-
text. For example, in the simplified HFSM in Figure
3, the combination of the NP robot and VP see in-
dicates the usage of the color sensor or the ultrasonic
sensor, and as such the HFSM transitions from the
robot superstate SS
1
to the sensor superstate SS
2
. The
combination of the NP robot, NP LED and VP turn
indicates the LED function. Thus, the HFSM tran-
sits from SS
1
to the LED superstate SS
3
. The hierar-
chical structure of the HFSM allows us to model the
system by building individual sub-FSMs based on the
domain-specific function library for the LEGO robot
and also improves maintainability and scalability.
In addition to handling simple action statements,
the LEGO NLPr system also handles Condition-
Action statements with flexible sentence structure.
Logical keywords such as if, else, while, and, and
or are treated similarly to how they are in standard
computer programming languages.
The same token sequence can correspond to dif-
ferent desired functions depending on whether the se-
quence is part of a condition or an action. For exam-
ple, the token sequence in the conditional statement
if “the robot is happy” refers to a Boolean variable
checking function to see if the happy is True, while
the same token sequence in the action statement “the
robot is happy” refers to a variable assignment func-
tion that assigns True to happy. In order to account
for this behavior and correctly parse and validate the
semantic meaning of the input sentences, the main
FSM is split into two sub-machines: condition FSM
and action FSM. Each sub machine part has its own
properties of validation.
Figure 3: Example HFSM with some states omitted.
3.1.1 The Condition FSM
The LEGO NLPr system accepts conditional state-
ments of the following types: 1) sensor usage: check-
ing the value read from a sensor. There are four differ-
ent sensors available on the LEGO Mindstorms EV3
platform: gyro sensor, touch sensor, ultrasound sen-
sor, and a color sensor. 2) variable usage: checking
the value of a variable. A variable can be a Boolean,
a numeric value, or a string. However, all variable
Formal Validation for Natural Language Programming using Hierarchical Finite State Automata
509
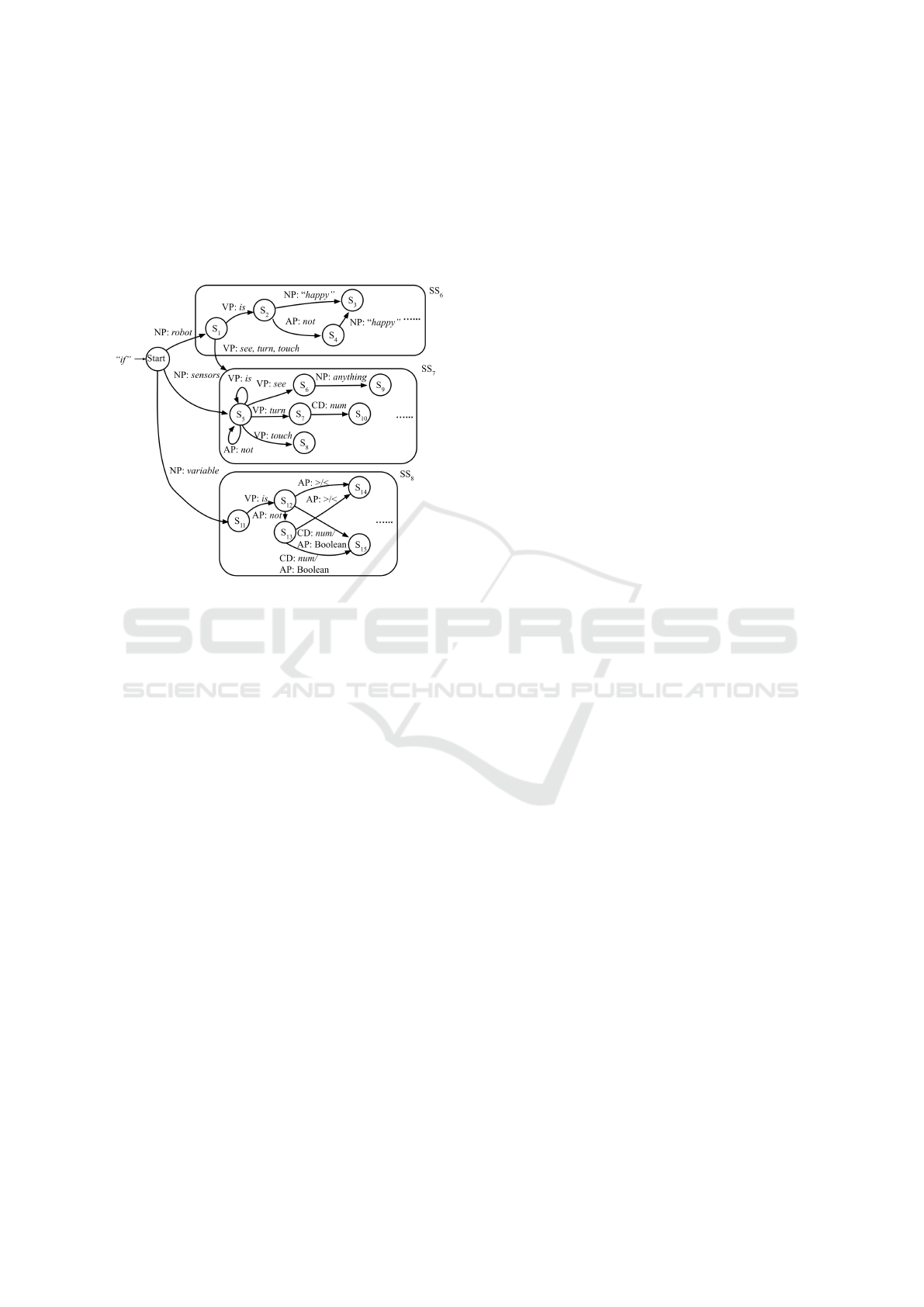
names must be declared in advance. Using a variable
without first initializing it results in the HFSM tran-
sitioning to the error state. For example, checking
“If the robot is happy, ...” will result in the HFSM
reaching the error state and raising an error about the
undeclared variable happy if there is not a statement
such as “The robot is happy.” ahead of it.
Figure 4: Condition HFSM with some states omitted.
3.1.2 The Action FSM
The LEGO hardware limits the action space that
the robot operates in. The functions in the LEGO
domain-specific function library can be split into mul-
tiple sub-FSMs based on the primary object: 1) the
robot, 2) the sensors, 3) the LED, 4) default attach-
ments that are always connected to the robot, such as
the servo and 5) new numeric and Boolean variables,
as well as new custom user-defined robot attachments,
which need to be declared in advance.
3.1.3 Implementing Context-sensitivity
Unlike CFG, the proposed HFSM considers a token’s
context when evaluating its validity, enabling it to de-
tect errors in the sentences’ semantic meaning early.
The HFSM’s sensitivity to context is also different
from simple sentence pattern-matching because our
approach reports errors in semantics.
In order to ensure the correctness of the NLPr sys-
tem’s understanding of how to map inputs to their cor-
responding output programs, context analysis is re-
quired to guarantee that context-sensitive requests are
handled properly.
To achieve such context analysis, context-
sensitive rules γ applied in the HFSM are mod-
eled based on the domain-specific function library
of LEGO robot. Context sensitivity helps catch er-
rors that arise in situations where input is syntacti-
cally valid but not semantically valid such as ambigu-
ous inputs, undeclared variables, mismatched hard-
ware functionalities, and unimplementable or pro-
hibited behaviors. For example, the sentence “The
robot moves forward 90 degrees.” would pass syn-
tactic checking, as shown in the Superstate SS
1
in
Figure 6. However, the combination of the action
robot.move(forward) and the unit degree poses
a problem for an NLPr system as the move function
expects a distance variable but receives an angle in-
stead. Such semantic checking is done by apply-
ing the context-sensitive rules γ after input token se-
quence validation has been performed.
After the validation of the input token sequence,
and before making a final assertion of the input’s va-
lidity, a case analysis for context-sensitive semantic
checking checks if the input satisfies a given property
P is applied as the final check. The case analysis acts
as a checklist with multiple registers that need to be
set to pass validation. Take the LED superstate SS
3
as
another example. When the sequential tokens pass the
structure validation, instead of a directly transitioning
to the accept or error states, there is a semantic check-
ing multiplexer by the end of the LED superstate SS
3
,
shown in Figure 7. The multiplexer checks if the in-
formation extracted from the sentence can form valid
token combinations that the NLPr system can then use
to generate corresponding code. For example, if the
target LED color and the original LED color are the
same, which makes no sense in terms of controlling
the robot, the input will be marked as invalid, as in
the invalid sentence “The red LED turns red.” If a
target LED color, such as blue, is not supported, this
would result in an error as well, as shown in the in-
valid sentence “The LED turns on in blue.”
A similar approach is used to detect sentences
with run-on errors as well. For example, the checker
checks the registers for the target LED color and the
original LED color to detect the error in the sentence
“The LED turns from red to green from red to green.”
If one color register is already set when assigning a
new value, we know it could be a possible run-on sen-
tence with redundant or dangling terms.
3.2 The Error Reporting Mechanism
Much research on engineering education has high-
lighted the importance of high-quality and eas-
ily understandable error messages for beginner stu-
dents for learning a programming language (Traver,
2010)(Munson and Schilling, 2016)(Crestani and
Sperber, 2010)(Marceau et al., 2011). This is simi-
NLPinAI 2021 - Special Session on Natural Language Processing in Artificial Intelligence
510
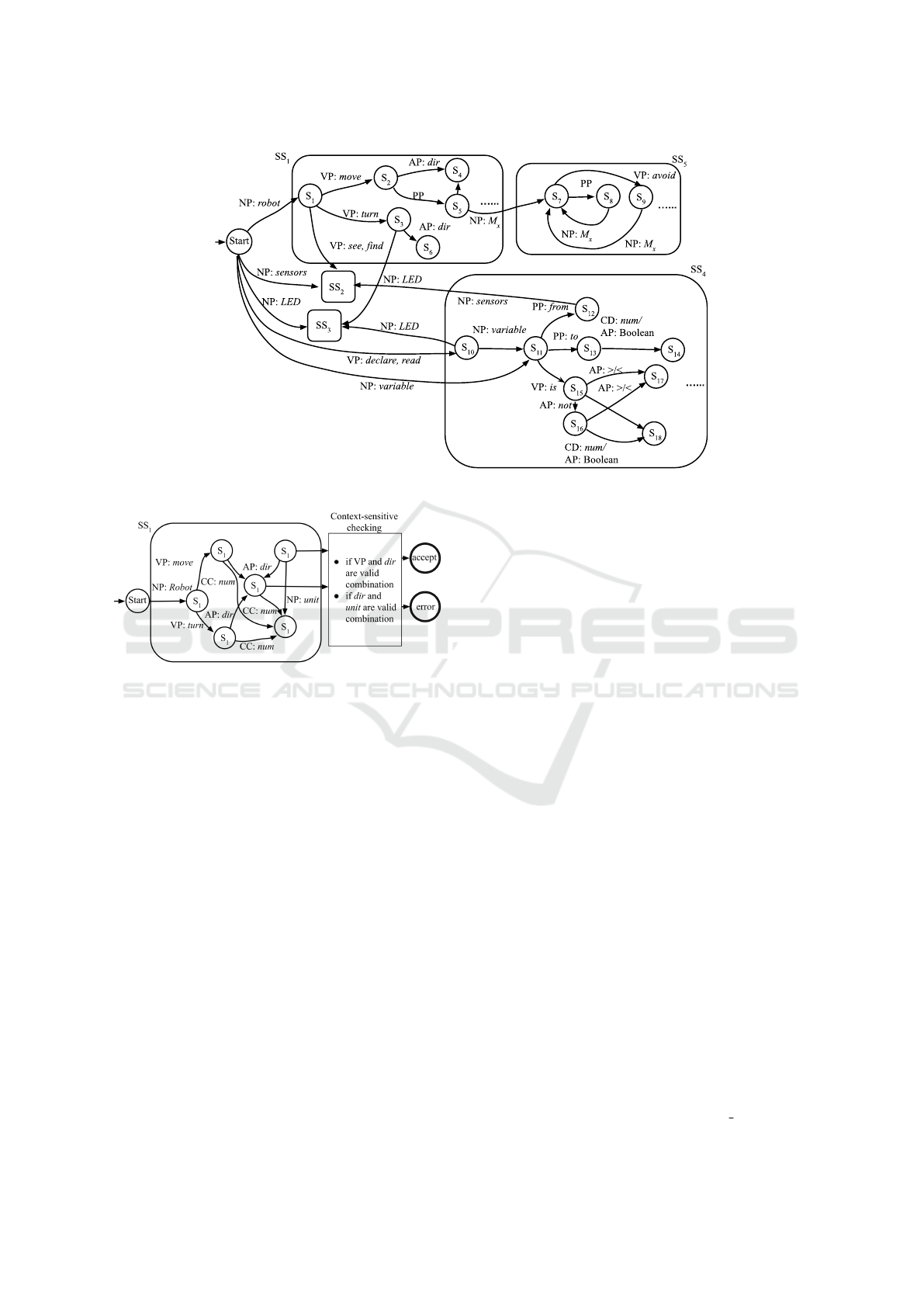
Figure 5: Simplified action HFSM with some states, including terminal states, omitted.
Figure 6: Simplified robot Superstate SS
1
with basic mo-
tions related states only.
larly important for debugging natural language sen-
tences, such as in GamgChangineer, an NLPr appli-
cation for video game design (Hsiao, 2018). The
phrasing and quality of error messages play a funda-
mental role in how feedback mechanisms impact stu-
dents’ actions when wrestling with untranslated NL
sentences, as well as the human-computer interaction
between the NLPr system and the users.
NL parsing is the process of transforming raw NL
inputs into a more standard and meaningful form that
can be understood and processed by the NLPr system.
By transforming and validating the inputs to the NLPr
system, the FSM-based parser imbues the input sen-
tences with trust (Graham and Johnson, 2014), which
means that we expect the sentences input to the NLPr
system to be written using somewhat reasonable stan-
dard forms and structures.
As the NLPr system expects input sentences to
be well-formed, we augment the FSM-based valida-
tion to include an error reporting framework that helps
guide users towards creating valid inputs. This FSM-
based error reporting framework leverages domain-
specific knowledge and lexicon for the NLPr applica-
tion. The error reporting functionality of this frame-
work provides early detection of not-covered, unim-
plementable, untranslatable, and ambiguous language
components in the inputs. Error and warning re-
porting alone does not provide much information for
beginner users. Therefore, in addition to meaning-
ful error messages, example sentences related to the
sentences’ semantic meanings are provided in accor-
dance with the teaching by example paradigm.
The errors that challenge the NLPr system can be
categorized into three main types:
1. Not-covered Language Components. These er-
rors mean that there are unknown words or unex-
pected sentence structures in the input. For ex-
ample, the sentence “The robot goes forward ran-
domly.” shown in Figure 1 is invalid because the
token “randomly” is not covered in the lexicon.
Thus, the error message generated would point
out that “randomly” is not understood by the sys-
tem and that it will be ignored when generating
the final program.
2. Missing Information. These errors mean that the
information extracted from the sentence is not suf-
ficient for function matching or program synthe-
sis. For example, while the sentence “The robot
goes forward.” is grammatically correct, it is not
concrete enough for generating executable pro-
grams for a robot as it is missing details such
as how far the robot should move forward. In a
situation such as this, where information is miss-
ing, default values will be used substituted. There
are many other forms such these errors may take,
such as the sentence “Read variable xyz from the
Formal Validation for Natural Language Programming using Hierarchical Finite State Automata
511
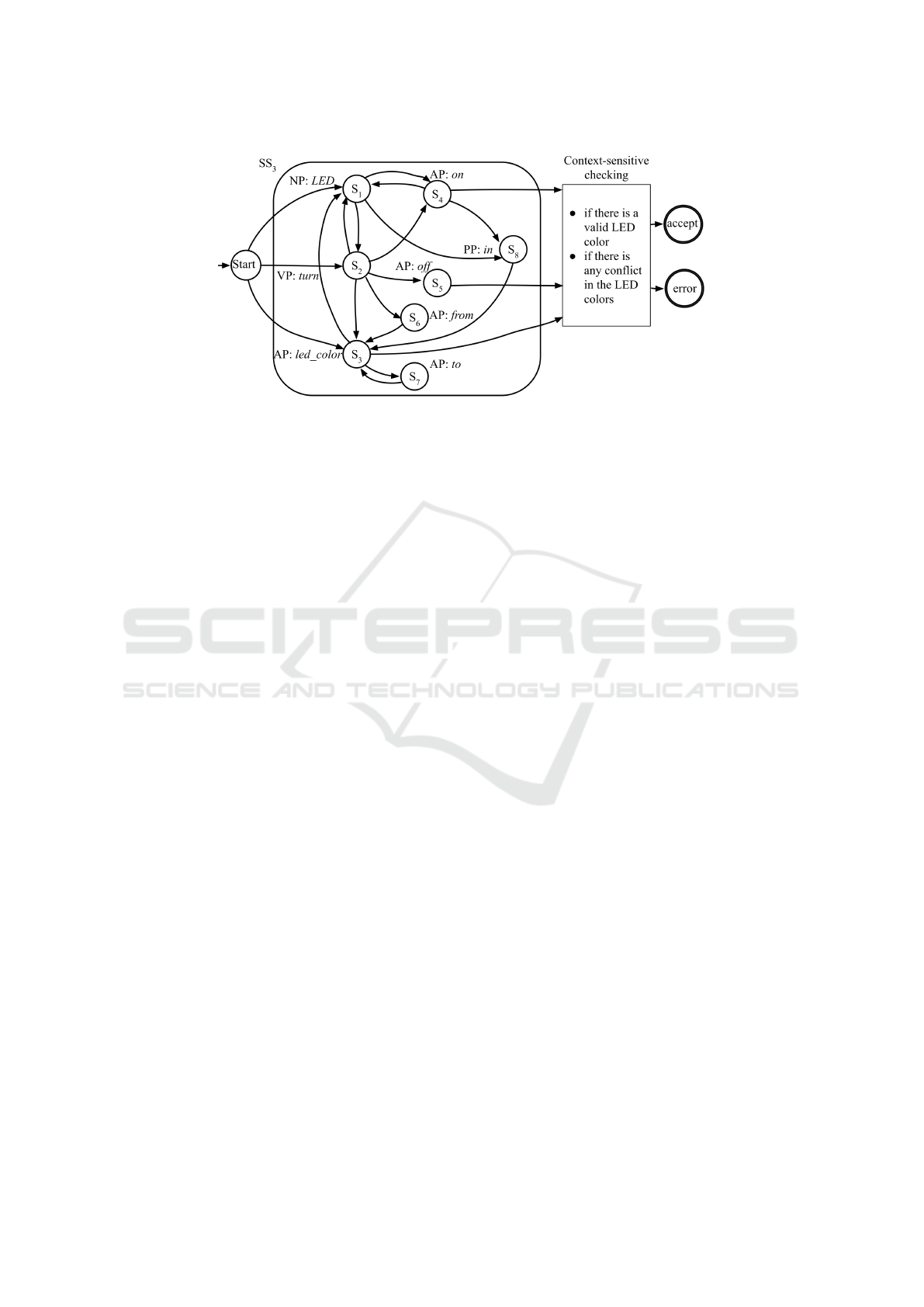
Figure 7: Simplified LED Superstate SS
3
with some states omitted.
sensor”, which does not adequately specify which
sensor is being used.
3. Mismatched Information. These errors mean
that the extracted sentence contains conflicting
information that cannot map to a unique match
in the function library. For example, the ob-
ject color sensor and the action touch together
would result in a transition to an error state as
there is no valid function that can both handle
color and touch. Function properties also need
to be validated when a valid function is matched.
For example, the unit inch does not fit the function
robot.turn(left) in the sentence “The robot
turns left 90 inches.”
Currently, the error message library contains 118
distinct error and warning message templates associ-
ated with LEGO robot objects and actions. Each mes-
sage has a unique error ID. Error messages describe
precisely what part of the input caused the validation
error, whether that be a problematic token, a missing
token, or a mismatch between an object and its action.
Many error messages are accompanied by handwrit-
ten examples of proper inputs, which serve to show
users how to correct their errors directly.
One sentence can result in multiple errors. For
example, the sentence in Example 1 results in three
error messages. Error #117 points out that the token
“avoid” is not understood by the system. Error #13
and error #16 are generated because the system parses
the sentence in as “robot move forward”, but no infor-
mation is given that dictates how far the robot should
move forward.
Not all errors result in the termination of the trans-
lation process for the given sentence. For some errors,
such as certain missing information errors, the system
can still generate output code by inserting default val-
ues. For example, the token “avoids” in Example 1
would be skipped, and the rest of the sentence will
be filled with default values in order to generate the
program, as seen in error #13 and error #16.
Example 1. “The robot avoids moving forward.”
Error messages:
• ERROR(117): Unknown word found when de-
scribing a robot action. Please consider re-
writing the sentence without it. In the LEGO
NLPr system, you need to describe what needs to
happen step by step to avoid ambiguity. I see that
the next word is an action. I will skip the current
word, which might cause mistranslation: *avoid*
• ERROR(16): It seems like we are missing a num-
ber. Please write numbers in numerical digits 0 9.
A default value will be used.
• ERROR(13): It seems like we are missing a
unit. You can turn for “degrees”, move for
“inches”/“cm”/“seconds”, or stop for “sec-
onds”. I will use default now.
However, the system is not able to handle all pos-
sible cases where an unknown token is in the input.
For example, the sentence in Example 2 cannot be
translated because the object “right arm” is not recog-
nized by the system, and if it were simply dropped,
then no action would take place.
Example 2. “Turn the right arm up.”
Error messages:
• ERROR(24): It seems like we are missing an ob-
ject or a sensor that can be recognized. Please
check your spelling or re-write the sentence in
an object-orientated way. For example, use “the
robot turns left 90 degrees.” instead of “turn the
robot left 90 degrees.”
• ERROR(48): Possible undefined variable or
Boolean status. It looks like you are checking a
variable or status that’s not previous defined. You
NLPinAI 2021 - Special Session on Natural Language Processing in Artificial Intelligence
512

can declare a variable by using example sen-
tences like “*xyz* is 5.”, “*happy* is True”, “set
*distance* to 10 inches.” or simply use “xyz =
5”(do not forget the space). Can you check the
object in: *right arm up*
• ERROR(80): Unable to understand this action.
Possible sentence fragment!
For NL sentences with multiple conditions or mul-
tiple actions, the sentences are first split into condition
set and action set and then processed separately. For
example, the conditional statement “if the distance is
larger than 10 inches and the distance is less than 50
inches, ...” contains two conditions: distance>10
and distance<50. This approach allows the system
to treat each condition independently. As such, the
valid parts can be translated even if some of the con-
ditions are not understood by the system. For exam-
ple, in the condition statement “If the robot is happy
or the robot is going forward, ...”, the first condi-
tion happy==True is valid while the second condition
raises the following error in Example 3.
Example 3. Condition: “robot is going forward ”
Error messages:
• ERROR(118): Can’t check the moving direction
as a condition. Please consider declaring a robot
status. For example, “If CONDITION, the robot
goes forward 10 inches.” then use the same CON-
DITION for the desired action.
4 EXPERIMENTAL RESULTS
To evaluate the performance and the coverage crite-
rion of the proposed HFSM-based semantic parsing
and error-reporting system, we used two sets of in-
put sentences: 1) 630 total valid and invalid sentences
collected manually, 2) 1148 stochastically generated
sentences. These sentences are randomly synthesized
using a Markov chain based method based on the
manually collected sentences and the domain-specific
lexicon. The HFSM-based formal validation helps to
effectively reduce the mistranslations caused by sim-
ply accepting a sentence based on the n-gram based
models keyword matching.
4.1 Manually Collected Sentences
The manually collected and annotated test set covers
each transition of the HFSM and each nested sub-
state at least once. 422 out of 630 sentences are valid
by default and pass the validation through the pro-
posed HFSM. 3 false negative cases and 7 false pos-
itive cases are in the rest 208 ill-designed sentences,
which results in a precision of 98.21% and a recall
of 99.23%. 892 error messages are generated for the
208 erroneous sentences, minimum 1 message, maxi-
mum 8 messages, and mean 1.38 messages. The for-
mal validation system correctly classifies 98.41% of
the manually collected sentences as valid or invalid.
4.2 Auto-generated Sentences
A simple Markov chain-based NL text generator is
implemented to generate a rich set of testing sen-
tences. 1148 sentences with a max sentence length
of 30 words are produced. Because of the stochastic
nature of the Markov chain model, the sentences gen-
erated are random and error-prone. This is desirable
since we want to see if the corresponding error mes-
sages can provide helpful information for the users.
290 out of the 1148 sentences generated are semanti-
cally and grammatically correct and are successfully
validated by the HFSM. After running the rest of the
sentences through the HFSM, 50 false negative cases
and 15 false positive cases are identified, which re-
sults in a precision of 94.77% and a recall of 84,47%.
1619 error messages are generated for the 858 erro-
neous sentences, minimum 1 message, maximum 7
messages, and mean 1.89 messages. The formal vali-
dation system achieves an accuracy of 94.34% on the
auto-generated dataset. Therefore, the overall accu-
racy of the formal validation engine is 95.78%.
4.3 Case Study
In order to demonstrate how the semantic parsing and
error reporting system works, some examples are dis-
cussed above and in this section. In Example 4, the
condition “if the touch sensor” is clearly a sentence
fragment, thus labeled with Error #9, #23 and #39.
Example 4. “The robot picks up the robot if the touch
sensor.”
Error messages:
• ERROR(9): missing action for sensor condition.
• ERROR(23): incomplete sentence. Please check
if you are missing an action word, numbers, units,
colors, or directions.
• ERROR(39): sentence fragment found. In our sys-
tem, the “and” and “or” are keywords used to
parse the sentence. For example, a conditional
statement can be written as “if CONDITION1 and
CONDITION2, ACTION1 and ACTION2”. Each
CONDITION and ACTION will be processed sep-
arately. Therefore, to avoid ambiguity in condi-
tions, instead of using sentences like “if the color
sensor sees black or white, *action*”, use “if the
Formal Validation for Natural Language Programming using Hierarchical Finite State Automata
513

color sensor sees black, *action*. Else if the color
sensor sees black, *action*”.
• ERROR(116): Unknown word found when de-
scribing a robot action. Please consider re-write
the sentence without it. In the LEGO NLPr sys-
tem, you need to describe what needs to happen
step by step to avoid misunderstanding. Can you
check what is: *pick*
• ERROR(17): Expect an action word for the robot
object.
While evaluating the performance of the proposed
HFSM using collected sample sentences, we also
found corner cases where false negatives and false
positives exist, which indicates that future develop-
ment and improvement on the HFSM’s structure are
needed. Example 5 shows a false negative, an auto-
generated sentence that passes validation despite be-
ing erroneous. This error occurs because the declare
superstate SS
4
first skips the unknown word “vari-
able xyz” and then checks the rest of the sentence
to see if the unknown word needs to be treated as a
variable name or not. When the submachine passes
the previous state to the next state after skipping the
custom variable token “variable xyz”, the action “set”
overwrites the first action read. Thus, the sentence is
treated as “The variable xyz sets to 10 seconds.”
Example 5. “Read the variable xyz sets to 10 sec-
onds.”
The unknown word is initially ignored for variable
declaration functions modeled in SS
4
because it is un-
certain whether the unknown word is a variable name
without checking the context of the rest of the sen-
tence. When the rest of the input tokens indicates this
sentence assigns variable value, the unknown word
then is recognized as a variable and pass the valida-
tion. This kind of mistake could be fixed by incorpo-
rating short term memory or a 2-pass analysis.
A false positive example is shown in Example 6.
While error #118 and error #17 are correctly raised by
the condition and action in the sentence, error #116
regarding unknown word is falsely raised because it
accidentally treats the end of sentence “.” as a word
token since the usage of punctuation in this circum-
stance is not considered while modeling the FSM.
Example 6. “The robot if the robot goes to M1.”
Error messages:
• ERROR(118): Cannot check the moving direction
as a condition. Please consider declaring a robot
status. For example, “If CONDITION, the robot
goes forward 10 inches.” then use the same CON-
DITION to for the desired action.
• ERROR(116): Unknown word found when de-
scribing a robot action. Please consider re-write
the sentence without it. In the LEGO NLPr sys-
tem, you need to describe what needs to happen
step by step to avoid misunderstanding. Can you
check what is: *.*
• ERROR(17): Expect an action word for the robot
object.
5 CONCLUSION AND FUTURE
WORK
We have presented an HFSM-based formal valida-
tion of NL inputs for the LEGO robot natural lan-
guage programming application. This system pro-
cesses input sentences using a hierarchical structured
FSM to extract information for generating interme-
diate representations for valid sentences and mean-
ingful error messages to help users “debug” invalid
sentences. As such, the unknown and missing lan-
guage components would not simply be ignored while
generating executable programs for LEGO robots.
The HFSM is modeled based on basic English gram-
mar rules with the additional use of exceptions and
domain-specific knowledge for the LEGO robot. The
transitions between two states/superstates are context-
sensitive, allowing the detection of any mismatch-
ing/unknown/missing information. This detection en-
riches the meaning of generated error messages and
provides more useful error messages to users.
The use of hierarchical structure also eases the
maintainability of the system and significantly re-
duces the number of repeat states needed. Since an
input sentence will only be labeled as valid if the tran-
sitions result in a final success state, the process of
translating natural language sentences to executable
programs is more reliable. However, the system may
still be tricked by some carefully crafted sentences
and is subject to some restrictions in sentence struc-
ture due to the HFSM’s preference for an object-
oriented language style. Despite these limitations, it
is well-suited for teaching novice users logical think-
ing and problem-solving skills.
Future work includes improving the modeling to
include more language components and more diverse
structure, expanding the error messages dictionary,
and investigating the applicability of this technique to
new problem domains.
REFERENCES
Allauzen, C., Riley, M., Schalkwyk, J., Skut, W., and
Mohri, M. (2007). Openfst: A general and efficient
weighted finite-state transducer library. In Holub, J.
NLPinAI 2021 - Special Session on Natural Language Processing in Artificial Intelligence
514

and
ˇ
Z
ˇ
d
´
arek, J., editors, Implementation and Applica-
tion of Automata, pages 11–23, Berlin, Heidelberg.
Springer Berlin Heidelberg.
Alur, R. and Yannakakis, M. (1998). Model checking of
hierarchical state machines. In Proceedings of the 6th
ACM SIGSOFT International Symposium on Founda-
tions of Software Engineering, SIGSOFT ’98/FSE-6,
page 175–188, New York, NY, USA. Association for
Computing Machinery.
Beaufort, R., Roekhaut, S., Cougnon, L.-A., and Fairon, C.
(2010). A hybrid rule/model-based finite-state frame-
work for normalizing SMS messages. In Proceed-
ings of the 48th Annual Meeting of the Association for
Computational Linguistics, pages 770–779, Uppsala,
Sweden. Association for Computational Linguistics.
Crestani, M. and Sperber, M. (2010). Experience report:
Growing programming languages for beginning stu-
dents. ICFP ’10, page 229–234, New York, NY, USA.
Association for Computing Machinery.
Goyal, R., Dymetman, M., and Gaussier, E. (2016). Natural
language generation through character-based RNNs
with finite-state prior knowledge. In Proceedings of
COLING 2016, the 26th International Conference on
Computational Linguistics: Technical Papers, pages
1083–1092, Osaka, Japan. The COLING 2016 Orga-
nizing Committee.
Graham, R. D. and Johnson, P. C. (2014). Finite state ma-
chine parsing for internet protocols: Faster than you
think. In 2014 IEEE Security and Privacy Workshops,
pages 185–190.
Hsiao, M. S. (2018). Automated program synthesis from
object-oriented natural language for computer games.
In Proceedings of the Sixth International Workshop
on Controlled Natural Language, August, 2018, pages
71–74.
Hulden, M. (2009). Foma: A finite-state compiler and li-
brary. In Proceedings of the 12th Conference of the
European Chapter of the Association for Computa-
tional Linguistics: Demonstrations Session, EACL
’09, page 29–32, USA. Association for Computational
Linguistics.
Kaiser, E. C., Johnston, M., and Heeman, P. A. (1999).
Profer: predictive, robust finite-state parsing for spo-
ken language. In 1999 IEEE International Confer-
ence on Acoustics, Speech, and Signal Processing.
Proceedings. ICASSP99 (Cat. No.99CH36258), vol-
ume 2, pages 629–632 vol.2.
Kuhn, T. (2014). A survey and classification of controlled
natural languages. Comput. Linguist., 40(1):121–170.
Manning, C. D. and Sch
¨
utze, H. (1999). Foundations of
Statistical Natural Language Processing. MIT Press,
Cambridge, MA, USA.
Marceau, G., Fisler, K., and Krishnamurthi, S. (2011).
Mind your language: On novices’ interactions with
error messages. In Proceedings of the 10th SIG-
PLAN Symposium on New Ideas, New Paradigms, and
Reflections on Programming and Software, Onward!
2011, page 3–18, New York, NY, USA. Association
for Computing Machinery.
Moisl, H. (1992). Connectionist finite state natural language
processing. Connection Science, 4(2):67–91.
Munson, J. P. and Schilling, E. A. (2016). Analyzing novice
programmers’ response to compiler error messages. J.
Comput. Sci. Coll., 31(3):53–61.
Rangra, R. and Madhusudan (2016). Natural language pars-
ing: Using finite state automata. In 2016 3rd In-
ternational Conference on Computing for Sustainable
Global Development (INDIACom), pages 456–463.
Stahlberg, F., Bryant, C., and Byrne, B. (2019). Neural
grammatical error correction with finite state trans-
ducers. In Proceedings of the 2019 Conference of the
North American Chapter of the Association for Com-
putational Linguistics: Human Language Technolo-
gies, Volume 1 (Long and Short Papers), pages 4033–
4039, Minneapolis, Minnesota. Association for Com-
putational Linguistics.
Taylor, A., Marcus, M., and Santorini, B. (2003). The Penn
Treebank: An Overview, pages 5–22. Springer Nether-
lands, Dordrecht.
Traver, V. J. (2010). On compiler error messages: What
they say and what they mean. Adv. in Hum.-Comp.
Int., 2010.
Yuan, Z., Stahlberg, F., Rei, M., Byrne, B., and Yan-
nakoudakis, H. (2019). Neural and FST-based ap-
proaches to grammatical error correction. In Proceed-
ings of the Fourteenth Workshop on Innovative Use
of NLP for Building Educational Applications, pages
228–239, Florence, Italy. Association for Computa-
tional Linguistics.
Zhan, Y. and Hsiao, M. (2020). Breaking down high-
level robot path-finding abstractions in natural lan-
guage programming. In NL4AI@AI*IA.
Zhan, Y. and Hsiao, M. S. (2018). A natural language pro-
gramming application for lego mindstorms ev3. In
2018 IEEE International Conference on Artificial In-
telligence and Virtual Reality (AIVR), pages 27–34.
Formal Validation for Natural Language Programming using Hierarchical Finite State Automata
515
