
LSTM-based System for Multiple Obstacle Detection using Ultra-wide
Band Radar
Amira Mimouna
1,2 a
, Anouar Ben Khalifa
2 b
, Ihsen Alouani
1 c
, Abdelmalik Taleb-Ahmed
1 d
,
Atika Rivenq
1
and Najoua Essoukri Ben Amara
2
1
IEMN-DOAE, UMR CNRS 8520, Polytechnic University Hauts-de-France, 59300 Valenciennes, France
2
Universit
´
e de Sousse, Ecole Nationale d’Ing
´
enieurs de Sousse, LATIS - Laboratory of Advanced Technology
and Intelligent Systems, 4023, Sousse, Tunisie
Keywords:
Obstacle Detection, UWB Radar, Deep Learning, LSTM, Intelligent Transportation Systems.
Abstract:
Autonomous vehicles present a promising opportunity in the future of transportation systems by providing
road safety. As significant progress has been made in the automatic environment perception, the detection of
road obstacles remains a major challenge. Thus, to achieve reliable obstacle detection, several sensors have
been employed. For short ranges, the Ultra-Wide Band (UWB) radar is utilized in order to detect objects in
the near field. However, the main challenge appears in distinguishing the real target’s signature from noise
in the received UWB signals. In this paper, we propose a novel framework that exploits Recurrent Neural
Networks (RNNs) with UWB signals for multiple road obstacle detection. Features are extracted from the
time-frequency domain using the discrete wavelet transform and are forwarded to the Long short-term memory
(LSTM) network. We evaluate our approach on the OLIMP dataset which includes various driving situations
with complex environment and targets from several classes. The obtained results show that the LSTM-based
system outperforms the other implemented related techniques in terms of obstacle detection.
1 INTRODUCTION
Seemingly during few years, autonomous vehicles
have turned a major interesting topic for researchers.
This is due to the exploitation of artificial intelli-
gence in the automotive field, which opened the way
to the deployment of self-driving cars. In fact, self-
driving cars have the potential to radically transform
the road’s environment by saving road users’ lives,
reducing pollution and fuel savings (Skrickij et al.,
2020) (Khalifa et al., 2020).
Real-time obstacle detection is one of the main
challenges presented in developing perception sys-
tems for Intelligent Transportation Systems (ITS)
(Tarchoun et al., 2020b) (Tarchoun et al., 2020a). To
achieve this, an ITS deploys numerous sensors. The
widely employed sensors are cameras, lidar and radar
sensors (Koci
´
c et al., 2018). These sensors can be
a
https://orcid.org/0000-0003-3658-643X
b
https://orcid.org/0000-0002-9946-0829
c
https://orcid.org/0000-0001-5102-8087
d
https://orcid.org/0000-0001-7218-3799
used in different circumstances, as each sensor has
typical advantages and disadvantages in this field of
research (Jegham et al., 2018). In this work, we focus
our attention on radar sensors.
The radar is a radio frequency-based sensor that
transmits electromagnetic waves and determines the
vehicle surrounding characteristics based on the re-
flected echo. Recently, the radar sensor has played
a key role in military applications (Lee et al., 2020),
people counting (Choi et al., 2017) and positioning
(Nguyen and Pyun, 2015), and it is specifically em-
ployed in the automotive field (Hakobyan and Yang,
2019). In fact, the radar is able to detect obstacles in
the vehicle’s surrounding by estimating their range,
velocity and angle. It is robust to bad weather con-
ditions like the fog and rain, and it is not affected by
poor light circumstances. Furthermore, it is employed
in short and long distances depending on the devel-
oped advanced driver assistance systems. In fact,
narrow-band radars are specially utilized to detect ob-
stacles in long ranges. For short range applications,
the Ultra-Wide Band (UWB) technology is the most
exploited in this area of research as it provides rich
418
Mimouna, A., Ben Khalifa, A., Alouani, I., Taleb-Ahmed, A., Rivenq, A. and Ben Amara, N.
LSTM-based System for Multiple Obstacle Detection using Ultra-wide Band Radar.
DOI: 10.5220/0010386904180425
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 418-425
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

information. The UWB radar emits narrow pulses
with low energy in the order of picoseconds to few
nanoseconds (Saito et al., 2003). This type of radar
has been in the spotlight owing to its high resolution,
good penetration rate, and anti-interference ability ac-
quired from other devices (Zetik et al., 2007).
The preeminent property of such a radar consists in
the deformation of the emitted pulse. This distortion
depends on the obstacle’s characteristics, thereby it is
labeled as the object signature. This signature is im-
pacted by the object shape, material and size. For ex-
ample, the signature of a metallic object has higher
amplitude than a pedestrian one. Accordingly, the
employment of such a technology remains promising
to detect objects in near ranges. The data acquired
from the UWB radar can be represented under two
forms: a 1 dimensional (1D) signal, which is the re-
flected echo, and 2 dimensional (2D) data that can be
a 2D feature map or a converted image.
Despite the fact that the UWB radar provides rich
information, one of the fundamental challenges that
could occur is distinguishing the real target’s signa-
ture from noise. For this purpose, various studies
have been conducted by proposing UWB-based de-
tectors. These detectors can be characterized into
two categories: hand crafted-based systems and deep
learning-based systems.
The most popular hand crafted-based detection
algorithms are: the correlation technique (Sakkila
et al., 2006), the Constant False Alarm Rate (CFAR)
(Rohling, 1983) based techniques and the Higher Or-
der Statistics (HOS) (Mendel, 1991). The aforemen-
tioned algorithms have been exploited ever since the
development of the conventional radar. CFAR-based
approaches analyze the characteristics of the signal’s
noise in order to define a threshold. The target is de-
tected if its magnitude is above the defined thresh-
old. A HOS-based technique is a correlation-based
method that uses higher-order moment spectra.
Currently, with the significant advancements con-
ducted by deep learning techniques, there exist vari-
ous studies that have investigated it with UWB signal
measurements, particularly in indoor environments
(Briso et al., 2019) (Tong et al., 2020) (Kumar et al.,
2019). Even though the interest of processing UWB
data via deep learning techniques is growing, there is
no work that has deeply treated UWB signals for out-
door environment perception to the best of our knowl-
edge. In this paper, we propose the first framework
that exploits UWB signals with a Long Short-Term
Memory (LSTM) network in an outdoor environment
involving complex urban driving situations for multi-
target detection. As the received UWB signal is time-
series data, the exploitation of a RNN is suitable to ex-
hibit the temporal dependencies. Therefore, the main
intention of the developed network is to discriminate
the real target from noise within a received UWB sig-
nal.
In this work, the main contributions are the fol-
lowing:
• An overview of the existing deep learning-based
methods using UWB signals is presented.
• A proposal of the first framework that exploits
LSTM with UWB signals for multi obstacle de-
tection in an outdoor complex environment.
• A comparison between our suggested approach
and the state-of-the-art techniques based on ex-
panded experiments using an extensive environ-
ment perception dataset (Mimouna et al., 2020)
is detailed. The obtained results show that our
method outperforms the conventional techniques.
The remainder of this paper is arranged as follows.
In section 2, a review of related work using UWB sig-
nals is presented. The proposed approach is detailed
in section 3. In section 4, we expose the experimental
setup and the obtained results. Finally, we conclude
the paper in section 5.
2 RELATED WORK
In subsection 2.1, we present the reviewed work that
relies on using the UWB radar with hand-crafted de-
tectors. For subsection 2.2, we review the deep UWB-
based systems.
2.1 Hand-crafted UWB-based Systems
Most of the studies on UWB-based obstacle detec-
tion systems have taken advantage of the well-known
correlation technique, CFAR and HOS techniques.
These techniques are known as hand-crafted based
detectors. In (Sakkila et al., 2008), the correlation
was used to detect either a car, a metal plate, a mo-
torway barrier or a pedestrian. The HOS technique
was commonly employed to suppress the Gaussian
noise (Mendel, 1991). Several algorithms have been
extended from the CFAR including the Cell Averag-
ing CFAR (CA-CFAR) (Conte et al., 1988), the order
static CFAR (Blake, 1988), the Smallest Of CFAR
(Cai et al., 2010), etc. A new thresholding method
based on the CFAR technique for UWB-based de-
tection application was put forward in (Quan et al.,
2020). The approach took into consideration false
alarm and miss-detection criteria. A new parameter,
entitled constant miss-detection rate (CMDR), is de-
fined. The final threshold was calculated by adding
LSTM-based System for Multiple Obstacle Detection using Ultra-wide Band Radar
419

the CFAR and CMDR rates. The experiments showed
good performances, although they were just carried
out in indoor environment using self-recorded dataset.
In the work presented in (Kim, 2020), metal lanes
would be detected if the energy value of the received
UWB signal surpassed a defined threshold. In (Sadli
et al., 2018), a UWB radar detector for ITS applica-
tions was proposed by combining the CA-CFAR and
HOS techniques. Nevertheless, the experiments were
performed under controlled scenarios.
In fact, most of the aforementioned related work
has been a threshold-based methods. Otherwise, these
techniques depend essentially on the amplitude of the
object’s signature. Moreover, it should be pointed that
the considered environment and scenarios are con-
trolled using restrained datasets.
2.2 Deep Learning UWB-based Systems
To the best of our knowledge, UWB-based systems
that rely on deep learning techniques have been em-
ployed only for indoor applications such as: activity
recognition (Sadreazami et al., 2018), indoor people
localization (Poulose and Han, 2020) and recognition
of movements during sleep (Piriyajitakonkij et al.,
2020).
Deep learning methods have been used with 2D
UWB data, so, this dilemma is considered as an image
processing-based challenge. In (Chen et al., 2019), an
SFCW-UWB radar was used for fall detection, which
generated a time-frequency spectrum as UWB data.
Hence, the employed deep learning architecture was
the fine-tuned Alexnet model. The authors in (Ko and
Lee, 2016) converted the time-series UWB data to
a time-frequency representation by Stockwell trans-
form. Afterwards, the reshaped images serve as in-
puts of the Convolutional neural network(CNN). The
exploited CNN model was LeNet. In (Ahmed and
Cho, 2020), UWB data were stored as a 2D matrix
including the slow-time and the fast-time properties.
Subsequently, it was converted to a grayscale image,
and later to an RGB one. GoogLeNet was adopted as
a deep learning architecture for hand gesture recogni-
tion.
In fact, 2D radar imaging based systems are no
longer considered a signal processing dilemma, but
rather an image processing challenge.
Otherwise, 1D UWB signals are likewise em-
ployed with deep learning for indoor applications.
To enhance transportation safety, a UWB radar is
installed in the rear view mirror to estimate the num-
ber and location of the in-vehicle people. A multi-
layer perception is employed where the time-sampled
radar signal data are the input of the network. To de-
fine the suitable parameters, the number of hidden
layers is adjusted. Compared to machine learning
techniques, the suggested network achieves better re-
sults (Lim et al., 2020). For activity recognition, a
CNN-LSTM network using three UWB radars is im-
plemented in (Maitre et al., 2021). The features are
extracted using a CNN architecture that includes: two
1D convolution layers with 64(1x3) filters, a Relu ac-
tivation function, and a 1D max pooling layer. Sub-
sequently, the output is flattened in to a 1D vector to
feed the LSTM network that contains 2 LSTM lay-
ers. Promising results are obtained. Jiang et al. (Jiang
et al., 2020) trained a CNN-LSTM to classify Line-
Of-Sight and None-Line-Of-Sight signals in the con-
text of indoor positioning applications. The UWB
channel impulse response was used as input of the
CNN that deployed two conventional layers. After-
wards, the CNN outputs were linked to the LSTM
network. A bi-direction LSTM and a stacked LSTM
were used. The achieved accuracy was equal to 81%,
but the training dataset was limited.
The aforementioned applications have considered
only indoor environments, using either 2D radar
imaging or 1D UWB data. Nevertheless, the ITS en-
vironment includes complex driving situations with
various types of targets. Moreover, in our case, the
choice of adopting a 1D radar signal rather than using
a 2D radar data representation is justified by the fact
that we deal with an ITS application where response
time is a crucial criterion.
3 PROPOSED METHOD
The received UWB radar signal is time-series data,
so, the adoption of the LSTM is recommended. Thus,
in this section, we firstly present the background of
the LSTM network, followed by a description of the
proposed approach.
3.1 LSTM Background
The LSTM network is a special architecture of the
artificial RNN developed in 1997 by Hochreiter and
Schmidhuber (Hochreiter and Schmidhuber, 1997). It
was introduced to avoid the issues that would occur
when modeling long-term dependencies with RNN
such as the vanishing or exploding gradient problem.
Therefore, the LSTM network is able to learn short-
time as well as long-term dependencies. It is espe-
cially known by its effectiveness to treat time-series
data (Ameur et al., 2020). In other words, the LSTM
network is able to model the temporal changes in a
series of data owing to its memory units and recur-
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
420
𝑌
𝑡
x
x
+
x
tanh
tanh
Forget Gate
Input Gate
Output Gate
σ
σ
σ
𝐶
𝑡−1
𝐶
𝑡
𝑂
𝑡
𝐼
𝑡
𝐹
𝑡
𝐹
𝑡
𝐻
𝑡
𝑋
𝑡
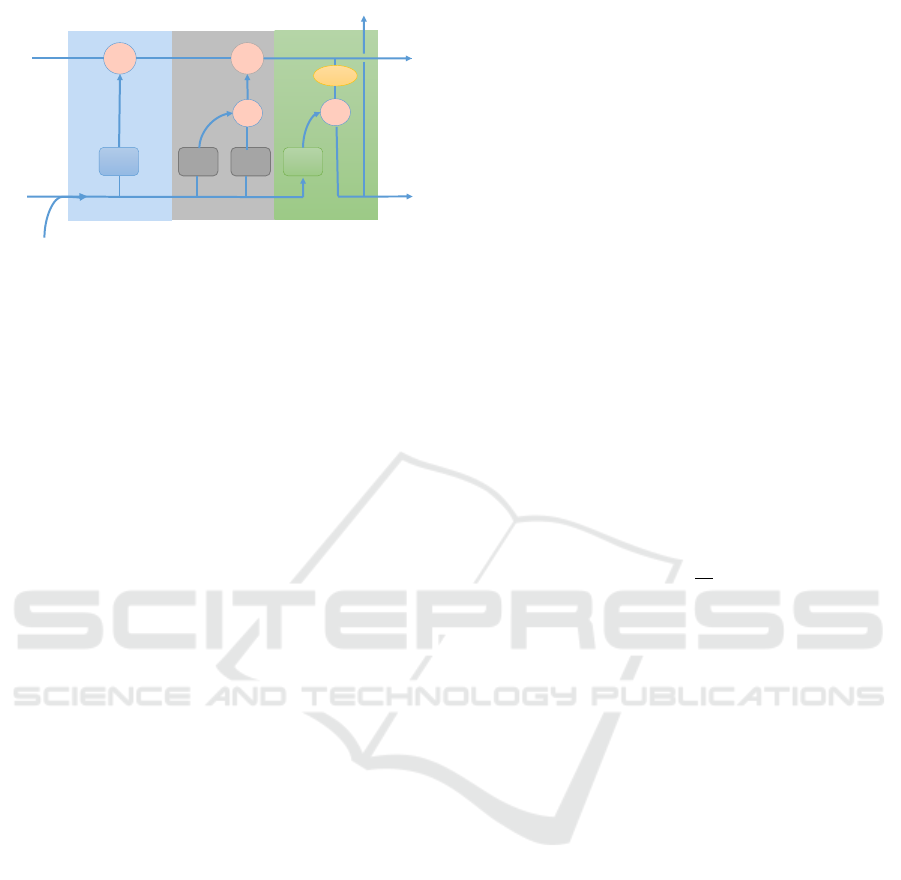
Figure 1: Architecture of LSTM unit.
rent architecture. The LSTM units are connected se-
quentially. Each LSTM cell includes its own memory
with three gates: the input, the output and the forget
gates. These gates are responsible for protecting and
controlling the flow of information through the cell.
Otherwise, they decide which information has to be
forgotten or reminded. The LSTM cell is expressed
by Equation 1 and detailed in Figure 1:
I
t
= σ(W
I
[H
t−1
,X
t
] + b
I
)
F
t
= σ(W
F
[H
t−1
,X
t
] + b
F
)
O
t
= σ(W
O
[H
t−1
,X
t
] + b
O
)
C
t
= F
t
∗C
t−1
+ I
t
∗tanh(W
C
[H
t−1
,X
t
] + b
C
)
H
t
= O
t
∗tanh(C
t
)
Y
t
= so f tmax(W
Y
H
t
+ b
Y
)
(1)
where:
• X ={X(1),X(2),..,X(N)} is a an input sequence,
where N is the length of the time series sequence.
• I
t
, F
t
, O
t
and C
t
are respectively the input, the
forget gate, the output gates and the memory cell
state.
• H
t
is the cell output and Y
t
is the final output.
• tanh and σ are respectively the hyperbolic tangent
and the logistic sigmoid activation functions.
• W and b are respectively the input weights, asso-
ciating the LSTM cell to the inputs, and the bias
vectors.
3.2 Proposed UWB-based System for
Obstacle Detection
Despite the fact that UWB reflected signal incorpo-
rates rich information, the discrimination between the
object’s signature from noise is a fundamental chal-
lenge. The received UWB signal r(t) can be modeled
following Equation 2:
r(t) = s(t)+ n(t) (2)
where s(t) is the received echo and n(t) is the noise
of the transmission channel of the UWB radar.
In fact, the process of emitting and receiving an
impulse by the UWB radar is labeled as a radar scan,
and the received echo of the j
th
radar scan s
j
(t) is
presented by Equation 3:
s
j
(t) =
N
j
∑
k=1
a
jk
x(t − t
jk
) (3)
where: x(t) is the emitted pulse which is acquired as
N
j
reflected signals, a
jk
is the amplitude. And, t and
t
jk
are respectively the reflection duration of the pulse
after the transmission process and the delay of the k
th
received echo in the j
th
radar scan.
Thereby, based on the UWB property that indicates
that each obstacle has its own signature, noise also
should be different.
On the other hand, the target’s wave reflection am-
plitude is generally changing over time due to phys-
ical characteristics (material, shape, size, etc.), and
it gets attenuated when moving away from the radar
sensor. Otherwise, the received echo is a function of
time, and is also a function of the obstacle distance
from the sensor. This time-distance relation is ex-
pressed by Equation 4:
R =
τc
2
(4)
where τ and c are respectively the delay between
the transmission and reception of the UWB pulse, and
the speed of light.
Hence, based on the temporal changes presented
in the UWB signal and the fact that the noise parti-
tions should be different from a real object’s signa-
ture, we adopt the idea of employing the LSTM net-
work. This choice is made on account of the fact
that this type of RNNs is able to recognize and syn-
thesize the dynamics variations within the received
UWB echo. Thereby, in this work we put forward
the first framework that exploits the LSTM network
with UWB signals for distinguishing obstacles from
noise in a vehicle environment perception context.
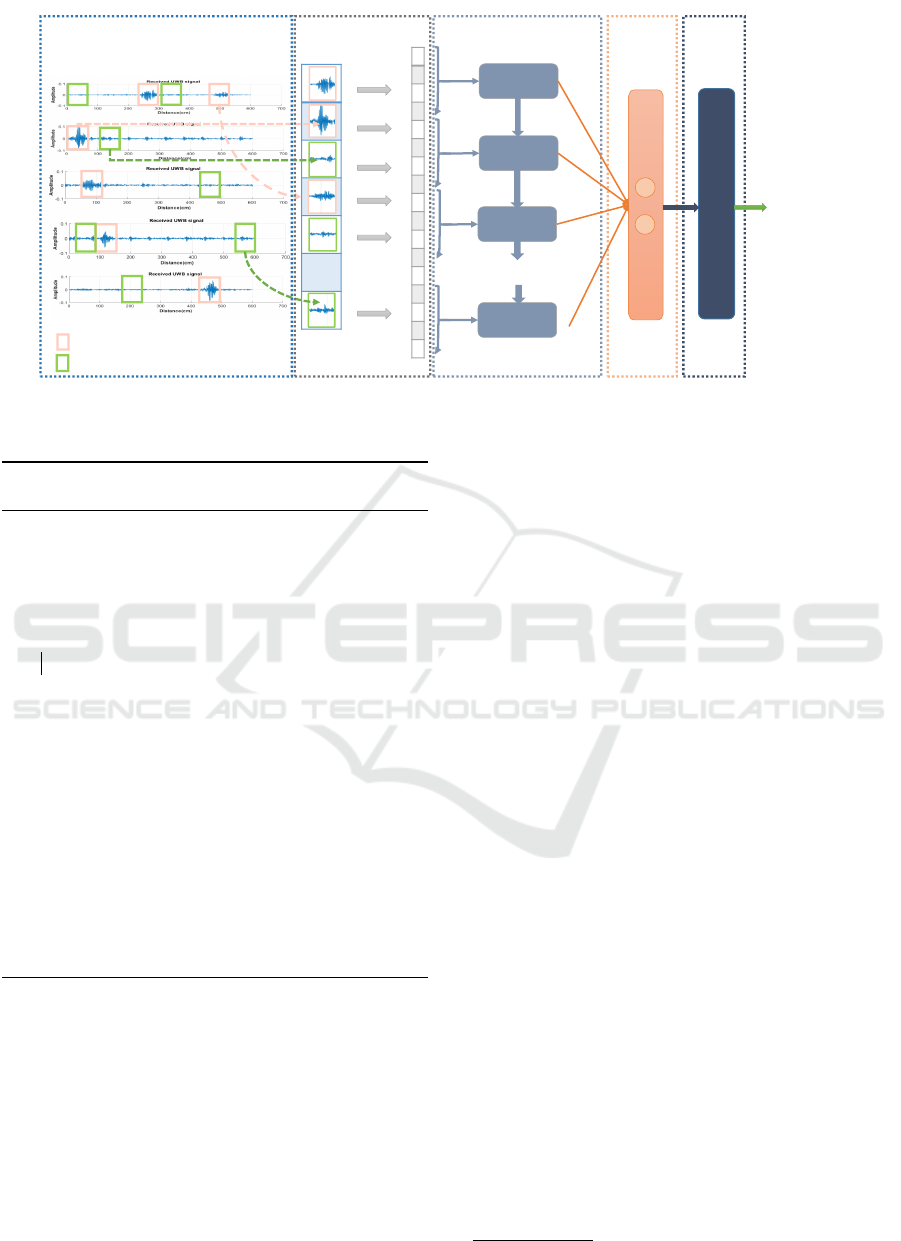
The proposed framework is explained in Algo-
rithm 14 and represented in Figure 2. Primarily, the
received signal is split into time series sequences [X
t
].
These sequences present the useful regions which
contain the real targets (illustrated by the orange win-
dows in Figure 2) and noise partitions (depicted by
green rectangles in Figure 2). For data variety, the
noise parts are randomly selected from the UWB sig-
nal. In fact, the window’s size (W sig) is empirically
set according to the objects’ signature length. After-
wards, features from the time-frequency domain are
extracted from the defined regions. Thus, the Discrete
Davelet Transform (DWT) is utilized. We extract four
features from the approximation coefficients (Ca) and
LSTM-based System for Multiple Obstacle Detection using Ultra-wide Band Radar
421
…
…
…
…
LSTM
LSTM
LSTM
LSTM
LSTM layer
Fully
Connected
Layer
Softmax
Layer
Feature Extraction
UWB received Signals Decomposition
Detection :
Real Object / Noise
Sequences
Feature vector
Discrete Wavelet
Transform
Real object
Noise
Figure 2: Proposed LSTM-based framework using UWB signals.
Algorithm 1: LSTM-based algorithm for obstacle
detection using UWB signals.
Data: Received signal r = [r
t
], Signature
window length: Wsig ; LST M
options
;
Position: pos
Output: Class
1 // Split time series into sequences
2 for t ← pos to length(W sig) do
3 X
t
= r(pos,t + pos);
4 end for
5 // Extract features using the DWT
6 Fvector = []
7 [Ca,Cd] = DWT(X
t
)
8 F1 = mean(Ca);F2 = std(Ca); F3 =
min(Cd); F4 = rms(Cd)
9 Fvector = append(F
v
ector,F1, F2, F3,F4)
10 // Feed the LSTM-based network
11 Out put
LST M
= LST M(Fvector,LST M
options
)
12 Out putFCL =
Fullyconnectedlayer(Out put
LST M
)
13 Class = So f tmax(Out putFCL)
14 return (Class)
the detail ones (Cd) for each sequence. Subsequently,
the fattened 1D descriptor vector feeds the LSTM net-
work. Finally, the output of the LSTM is linked to the
fully connected layer of size 2 followed by a Softmax
layer and a classification layer.
To conclude, the suggested detector analyzes the
temporal changes within the UWB signal via learn-
ing the extracted time-frequency features that highly
present the signal characteristics in order to differen-
tiate a real target from noise.
4 EXPERIMENTS
To highlight the efficiency of the proposed architec-
ture, we compare it to the implemented state-of-the art
techniques: CA-CFAR, HOS and the work in (Sadli
et al., 2018). Furthermore, we conduct our experi-
ments on a variety of urban driving scenarios. In this
section, we provide the experimental setup and the
obtained results. The experimental results are eval-
uated using the Precision (P), Recall (R) and F1-score
metrics.
4.1 Experimental Setup
The heterOgeneous Multimodal Dataset for Ad-
vanced EnvIronMent Perception (OLIMP)
1
is ex-
ploited in this work (Mimouna et al., 2020) . It
contains several urban driving situations including
four main categories: pedestrian, cyclist, vehicle and
tram. The dataset includes over 47 thousands of UWB
signals collected under various conditions: different
weather conditions (as fog, snow), near and far tar-
gets, etc. The developed radar by the UMAIN Inc
company is the sensor that has been used to record
the OLIMP database (Anu, 2020) . It is entitled HST-
D3. The radar distance range is six meters and its fre-
quency range is [3GHZ, 4GHZ] with a bandwidth of
0.45-1Ghz. The HST-D3 radar is composed of a mod-
ule radar called HST-S1 Pi and a Raspberry Pi 3. In
addition, The directional antennas are utilized as they
guarantee a better target echo-to-clutter and noise ra-
tio. The UWB radar signal comprises 660 samples
per frame. The radar is illustrated in Figure 3.
1
https://sites.google.com/view/ihsen-alouani/datasets
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
422
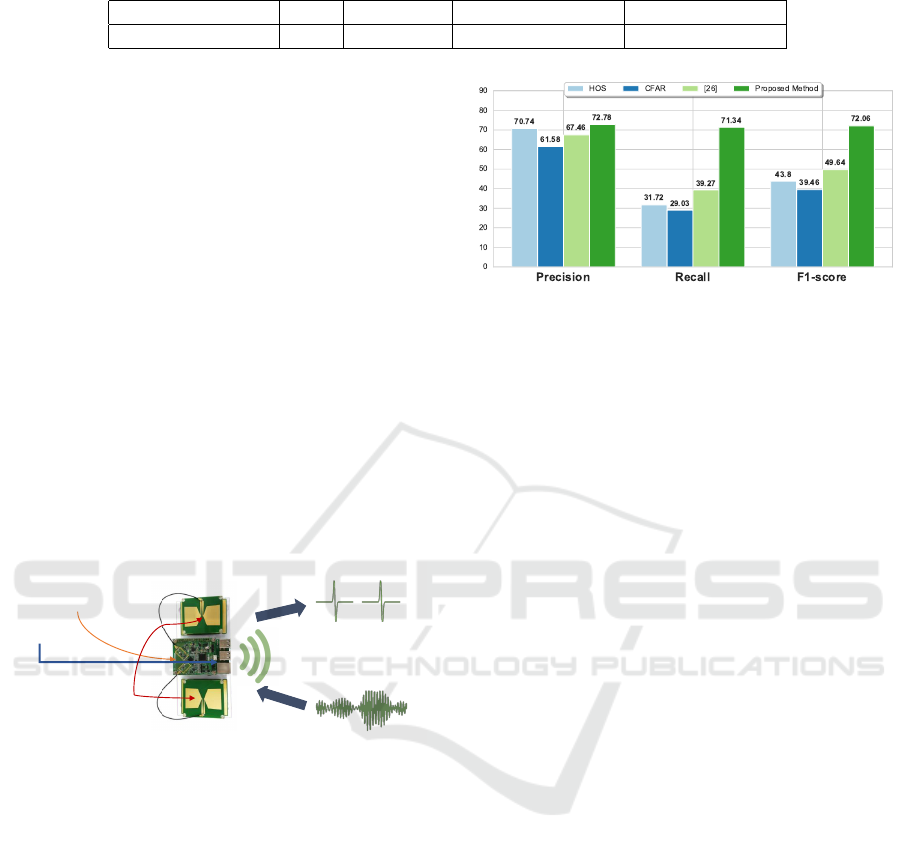
Table 1: Execution time results.
HOS CA-CFAR (Sadli et al., 2018) Proposed method
Execution time (s) 1.34 1.41 1.52 2.01
For our experiments, we use 2/3 of the data for
the training step and 1/3 for the test process. It shall
be mentioned that for training process, we exploit the
unidirectional network with 100 LSTM hidden units.
The number of epochs and mini batch size during ex-
periments are set to 100 and 64 instances respectively.
Moreover, we utilize the Adam optimizer (Bock et al.,
2018). The initial learning rate is set to 0.001. The
optimal set of parameters is selected based on pre-
liminary tests. For the DWT, the Daubechies wavelet
(db2) is employed to extract the features from the time
series sequences.
As regards to the comparative study, for the HOS
we take advantage of the 4
th
order cumulant that re-
lies on the Tuganit4 algorithm. Concerning the CFAR
technique, the CA-CFAR detector is considered with
an automatic threshold.
All the experiments are performed using Matlab
2020a on a PC with an Intel (R) core (TM) i7-8565U,
CPU @ 1.8 GHz, 16 GB of RAM.
The HST-D3 UWB Radar
Transmitted pulses
Received Echo
HST-S1 Pi radar module
Raspberry Pi 3
UWB Directional Antennas
Figure 3: Used HST-D3 UWB radar hardware specifica-
tions.
4.2 Results and Discussion
The experimental results concerning the comparative
study is illustrated in Figure 4. In fact, it can be seen
from the figure that the obtained results show that our
deep learning-based method achieves the highest per-
formance. Our proposed method outperforms signif-
icantly the considered traditional detectors, particu-
larly in terms of recall and precision.
The performance of the CA-CFAR, the HOS and
their combination in the work of (Sadli et al., 2018)
depend essentially on the definition of the thresh-
old parameter. A higher threshold generates more
false negatives, but, the opposite case produces ad-
ditional false positives. Furthermore, the object de-
tection rate using the aforementioned techniques rely
Figure 4: Experimental results using HOS, CFAR, work in
(Sadli et al., 2018) and our method.
on the object’s amplitude. In low magnitude cases,
which means that the object is moving away from the
radar, the target cannot be detected and it is consid-
ered as noise.
Compared with these techniques, the proposed
system remains robust even with low amplitude cases
as it is not based basically just on the object’s ampli-
tude. In fact, the LSTM-based method can distinguish
noise from real targets thanks to the relevant features
that are extracted from the time-frequency domain,
and by learning the temporal relationship between the
data sequences. The DWT reveals the structure of the
signal, thus allowing the localization of its peculiar
characteristics in time and frequency domains. For
this reason, the time-frequency features lead to a high
performance as they can represent well the signal’s
characteristics.
It shall be mentioned that, some missclassifications
are still present due the challenges related to the in-
terclass similarity of the obstacle’s signature and the
noise signal when the object’s signature has a low
amplitude. Accordingly, further research can be ex-
panded to extract deep features to tackle this dilemma.
In terms of complexity, Table 1 depicts a compar-
ison of the execution time of our method with the
state-of-the-art techniques. As it can be seen from
the results, our architecture has the highest execution
time, though, advanced hardware resources are to be
deployed to acquire faster detection time.
5 CONCLUSION
In this paper, we put forward a novel framework
for obstacle detection using UWB signals with deep
learning techniques. The developed detector focuses
principally on distinguishing the real target from
LSTM-based System for Multiple Obstacle Detection using Ultra-wide Band Radar
423

noise within the received UWB signal. For this pur-
pose, features are extracted using the DWT. These
descriptors are used as inputs of the LSTM network
which is exploited as a classifier. According to the
extensive experiments carried out on a large dataset.
Promising results are found, which outperform the
performances of the related techniques. For future
work, the employment of CNN to extract features
from the UWB signals can be investigated.
REFERENCES
(2020). Umain. http://www.umain.co.kr/en/uwb-radar-
sensor-module/.
Ahmed, S. and Cho, S. H. (2020). Hand gesture recognition
using an ir-uwb radar with an inception module-based
classifier. Sensors, 20(2):564.
Ameur, S., Khalifa, A. B., and Bouhlel, M. S. (2020). A
novel hybrid bidirectional unidirectional lstm network
for dynamic hand gesture recognition with leap mo-
tion. Entertainment Computing, 35:100373.
Blake, S. (1988). Os-cfar theory for multiple targets and
nonuniform clutter. IEEE transactions on aerospace
and electronic systems, 24(6):785–790.
Bock, S., Goppold, J., and Weiß, M. (2018). An improve-
ment of the convergence proof of the adam-optimizer.
arXiv preprint arXiv:1804.10587.
Briso, C., Calvo, C., and Xu, Y. (2019). Uwb propagation
measurements and modelling in large indoor environ-
ments. IEEE Access, 7:41913–41920.
Cai, L., Ma, X., Yan, S., Hao, C., and Wang, R. (2010).
Some analysis of fuzzy cago/so cfar detector in non-
gaussian background. In 2010 2nd International
Workshop on Intelligent Systems and Applications,
pages 1–4. IEEE.
Chen, S., Fan, C., Huang, X., and Cao, C. (2019). Low
prf low frequency radar sensor for fall detection by
using deep learning. In 2019 IEEE 4th International
Conference on Signal and Image Processing (ICSIP),
pages 400–404. IEEE.
Choi, J. W., Yim, D. H., and Cho, S. H. (2017). People
counting based on an ir-uwb radar sensor. IEEE Sen-
sors Journal, 17(17):5717–5727.
Conte, E., Longo, M., and Lops, M. (1988). Performance
analysis of ca-cfar in the presence of compound gaus-
sian clutter. Electronics Letters, 24(13):782–783.
Hakobyan, G. and Yang, B. (2019). High-performance au-
tomotive radar: A review of signal processing algo-
rithms and modulation schemes. IEEE Signal Pro-
cessing Magazine, 36(5):32–44.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9(8):1735–1780.
Jegham, I., Khalifa, A. B., Alouani, I., and Mahjoub, M. A.
(2018). Safe driving: driver action recognition using
surf keypoints. In 2018 30th International Conference
on Microelectronics (ICM), pages 60–63. IEEE.
Jiang, C., Shen, J., Chen, S., Chen, Y., Liu, D., and
Bo, Y. (2020). Uwb nlos/los classification using
deep learning method. IEEE Communications Letters,
24(10):2226–2230.
Khalifa, A. B., Alouani, I., Mahjoub, M. A., and Rivenq,
A. (2020). A novel multi-view pedestrian detec-
tion database for collaborative intelligent transporta-
tion systems. Future Generation Computer Systems,
113:506–527.
Kim, D.-H. (2020). Lane detection method with impulse
radio ultra-wideband radar and metal lane reflectors.
Sensors, 20(1):324.
Ko, S.-K. and Lee, B.-T. (2016). Object classification of
uwb responses using s t-cnn. In 2016 International
Conference on Information and Communication Tech-
nology Convergence (ICTC), pages 794–796. IEEE.
Koci
´
c, J., Jovi
ˇ
ci
´
c, N., and Drndarevi
´
c, V. (2018). Sensors
and sensor fusion in autonomous vehicles. In 2018
26th Telecommunications Forum (TELFOR), pages
420–425.
Kumar, D., Sarkar, A., Kerketta, S. R., and Ghosh, D.
(2019). Human activity classification based on breath-
ing patterns using ir-uwb radar. In 2019 IEEE 16th
India Council International Conference (INDICON),
pages 1–4.
Lee, D., Shaker, G., and Melek, W. (2020). Imaging of hu-
man walking behind the obstacle utilizing pulsed radar
technique in the c-band for military surveillance appli-
cations. JOURNAL OF ELECTRICAL ENGINEER-
ING & TECHNOLOGY, 15(3):1431–1439.
Lim, S., Jung, J., Kim, S.-C., and Lee, S. (2020). Deep neu-
ral network-based in-vehicle people localization using
ultra-wideband radar. IEEE Access.
Maitre, J., Bouchard, K., Bertuglia, C., and Gaboury, S.
(2021). Recognizing activities of daily living from
uwb radars and deep learning. Expert Systems with
Applications, 164:113994.
Mendel, J. M. (1991). Tutorial on higher-order statistics
(spectra) in signal processing and system theory: the-
oretical results and some applications. Proceedings of
the IEEE, 79(3):278–305.
Mimouna, A., Alouani, I., Ben Khalifa, A., El Hillali,
Y., Taleb-Ahmed, A., Menhaj, A., Ouahabi, A., and
Ben Amara, N. E. (2020). Olimp: A heterogeneous
multimodal dataset for advanced environment percep-
tion. Electronics, 9(4):560.
Nguyen, V.-H. and Pyun, J.-Y. (2015). Location detection
and tracking of moving targets by a 2d ir-uwb radar
system. Sensors, 15(3):6740–6762.
Piriyajitakonkij, M., Warin, P., Lakhan, P., Leelaarporn, P.,
Kumchaiseemak, N., Suwajanakorn, S., Pianpanit, T.,
Niparnan, N., Mukhopadhyay, S. C., and Wilaiprasit-
porn, T. (2020). Sleepposenet: Multi-view learning
for sleep postural transition recognition using uwb.
IEEE Journal of Biomedical and Health Informatics.
Poulose, A. and Han, D. S. (2020). Uwb indoor localization
using deep learning lstm networks. Applied Sciences,
10(18):6290.
Quan, X., Choi, J. W., and Cho, S. H. (2020). A new thresh-
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
424

olding method for ir-uwb radar-based detection appli-
cations. Sensors, 20(8):2314.
Rohling, H. (1983). Radar cfar thresholding in clutter
and multiple target situations. IEEE transactions on
aerospace and electronic systems, (4):608–621.
Sadli, R., Tatkeu, C., Hamidoun, K., El Hillali, Y., and
Rivenq, A. (2018). Uwb radar recognition system
based on hos and svms. IET Radar, Sonar & Navi-
gation, 12(10):1137–1145.
Sadreazami, H., Bolic, M., and Rajan, S. (2018). On the
use of ultra wideband radar and stacked lstm-rnn for
at home fall detection. In 2018 IEEE Life Sciences
Conference (LSC), pages 255–258. IEEE.
Saito, A., Harada, H., and Nishikata, A. (2003). Devel-
opment of band pass filter for ultra wideband (uwb)
communication systems. In IEEE Conference on Ul-
tra Wideband Systems and Technologies, 2003, pages
76–80. IEEE.
Sakkila, L., Deloof, P., Elhillali, Y., Rivenq, A., and Niar, S.
(2006). A real time signal processing for an anticolli-
sion road radar system. In IEEE Vehicular Technology
Conference, pages 1–5.
Sakkila, L., Tatkeu, C., Boukour, F., El Hillali, Y., Rivenq,
A., and Rouvean, J. (2008). Uwb radar system for
road anti-collision application. In 2008 3rd Inter-
national Conference on Information and Communi-
cation Technologies: From Theory to Applications,
pages 1–6.
Skrickij, V.,
ˇ
Sabanovi
ˇ
c, E., and
ˇ
Zuraulis, V. (2020). Au-
tonomous road vehicles: recent issues and expecta-
tions. IET Intelligent Transport Systems, 14(6):471–
479.
Tarchoun, B., Ben Khalifa, A., Dhifallah, S., Jegham, I.,
and Mahjoub, M. A. (2020a). Hand-crafted features
vs deep learning for pedestrian detection in moving
camera. Traitement du Signal, 37(2):209–216.
Tarchoun, B., Jegham, I., Khalifa, A. B., Alouani, I., and
Mahjoub, M. A. (2020b). Deep cnn-based pedestrian
detection for intelligent infrastructure. In 2020 5th
International Conference on Advanced Technologies
for Signal and Image Processing (ATSIP), pages 1–6.
IEEE.
Tong, H., Xin, N., Su, X., Chen, T., and Wu, J. (2020).
A robust pdr/uwb integrated indoor localization ap-
proach for pedestrians in harsh environments. Sen-
sors, 20(1):193.
Zetik, R., Sachs, J., and Thoma, R. S. (2007). Uwb short-
range radar sensing - the architecture of a baseband,
pseudo-noise uwb radar sensor. IEEE Instrumentation
Measurement Magazine, 10(2):39–45.
LSTM-based System for Multiple Obstacle Detection using Ultra-wide Band Radar
425
