
Non-linear Motorcycle Dynamic Model for Stability and Handling
Analysis with Roll Motion and Longitudinal Speed Regulation
Vincenzo Maria Arricale
a
, Renato Brancati
b
, Francesco Carputo
c
, Antonio Maiorano
d
and Guido Napolitano Dell’Annunziata
e
Department of Industrial Engineering, University of Naples “Federico II”, Via Claudio 21, Naples, Italy
Keywords: Non-linear Dynamics, Motorcycle Model, Longitudinal Control, Handling Analysis.
Abstract: The use of computer simulations in motorcycle engineering makes it possible both to reduce designing time
and costs and to avoid the risks and dangers associated with experiments and tests. The multi-body model for
computer simulations can be built either by developing a mathematical model of the vehicle or by using
commercial software for vehicle system dynamics. Even though the first method is more difficult and time-
consuming than the second, maximum flexibility in the description of the features of the model can be
obtained only by using an analytical model. Moreover, mathematical modelling has a high computation
efficiency, whereas multi-body software requires a lot of time to carry out simulations. For the reasons above,
the aim of this work was to develop a mathematical model of a motorcycle.
1 INTRODUCTION
The goal of many inventors over the past six centuries
was to discover a device for fast and easy road
transport. The invention of motorcycles began after
the development of bicycles and engines. In fact, the
first motorcycles were merely bicycles with small
engines thrust into the frame. Nowadays, as one of the
world’s most popular means of transport, the
motorcycle is not the early period monster that was
made of metal and solid wood; it is rich in variety,
advanced technology and well-made. Compared with
other methods of transport, it has unparalleled
advantages: it is economical, convenient and fast way
to travel far away (Sharp et al., 2001; Herlihy, 2004)
During nearly 130 years of development,
pioneering builders have exhausted their own
intelligence and have created numerous milestone
achievements, leaving their name in the history
books. From the twenties of the 20th century to the
present, improvements have become the main theme
of the development of motorcycles (Limebeer et al.,
2002). The modeling and control of a motorcycle are
a
https://orcid.org/0000-0002-1292-1566
b
https://orcid.org/0000-0003-2718-5706
c
https://orcid.org/0000-0001-8436-2516
d
https://orcid.org/0000-0002-9321-626X
e
https://orcid.org/0000-0002-7293-4975
different from the process for a bicycle for three main
reasons. First of all, the weight of a motorcycle is
much larger than that of a bicycle; the difference is
about ten times (Limebeer et al., 2002; Sharp, 1971).
Secondly, due to the disparate weight, the rider has a
different role to play during the model building
process between a motorcycle and a bicycle. Thirdly,
the speed is also hugely different. In fact, usually, the
speed of a bicycle can be around 20 km/h whereas a
modern motorcycle can achieve a top speed of about
230 km/h. For some sport motorcycles, the speed is
able to reach even 300 km/h. Under this speed, the
modeling process should not only consider the normal
dynamics of the bicycle but should also consider the
aerodynamics force analysis and the relevant thermal
phenomena arising during the vehicle motion
(Farroni et al., 2019). Over the years the theory of
motorcycle dynamics has been perfected gradually,
and some scholars have even done experimental
research based on their own experience (Escalona et
al., 2018; Sharp et al., 1980; Spierings, 1981).
The kinematic study of motorcycles is important,
especially in relation to the effects on their dynamic
behavior. Therefore, in this paper, in addition to the
292
Arricale, V., Brancati, R., Carputo, F., Maiorano, A. and Napolitano Dell’Annunziata, G.
Non-linear Motorcycle Dynamic Model for Stability and Handling Analysis with Roll Motion and Longitudinal Speed Regulation.
DOI: 10.5220/0010386802920300
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 292-300
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
kinematic study, some simple examples of the
dynamic behavior of motorcycles are reported in
order to show how kinematic peculiarities influence
the directional stability and maneuverability of
motorcycles (Bruni et al., 2020; Cossalter, 2014;
Cossalter et al., 2002). Finally, the aim of this work is
the development of a simple and effective motorcycle
model easily implementable in control logics on
board.
2 KINEMATICS OF
MOTORCYCLES
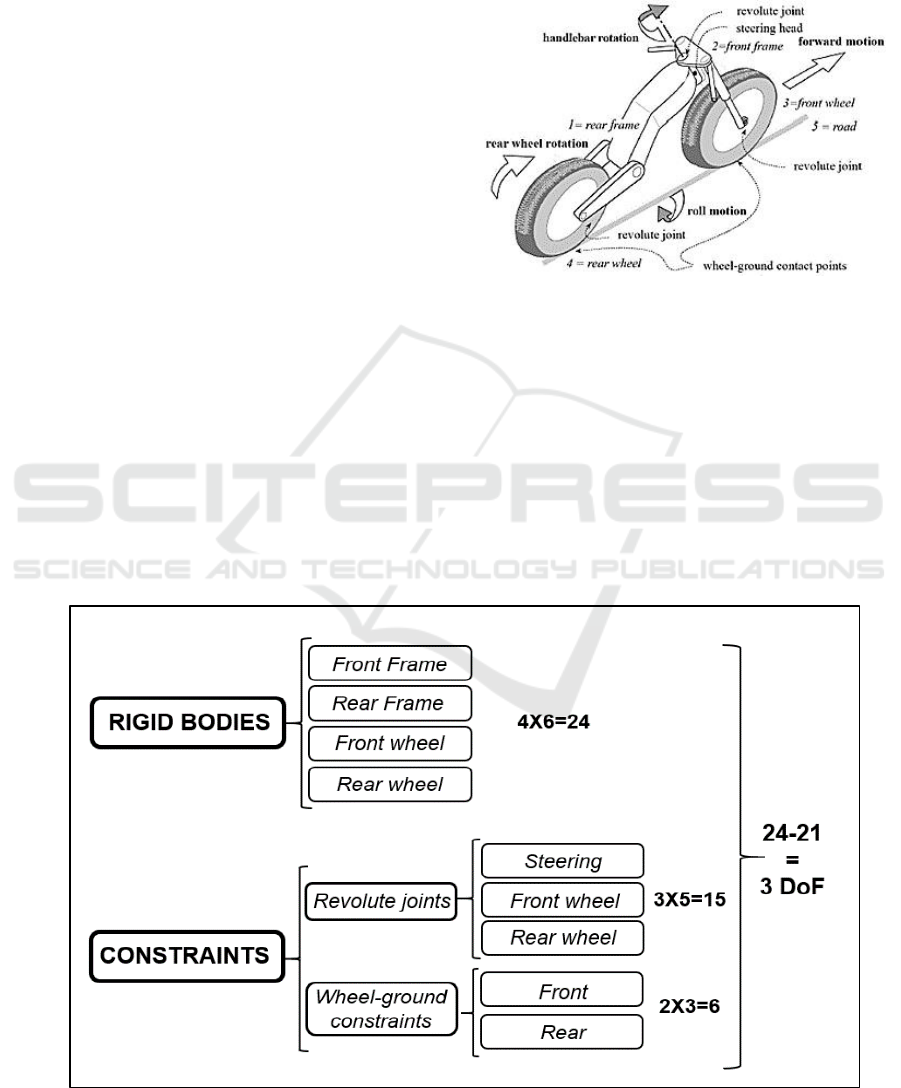
Motorcycles are composed of a great variety of
mechanical parts, including some complex ones.
From a strictly kinematic point of view, by
considering the suspensions to be rigid, a motorcycle
can be defined as simply a spatial mechanism
composed of four rigid bodies (Genta, 1997;
Gillespie, 1996):
▪ The rear assembly (frame, saddle, tank and mοtοr-
transmission drivetrain group);
▪ The front assembly (fork, steering head and
handlebars);
▪ The front wheel;
▪ The rear wheel.
▪ These rigid bodies are connected by three revolute
joints (the steering axis and the two-wheel axles)
and are in contact with the ground at two
wheels/ground contact points as shown in Fig.
1.Each revolute joint inhibits five degrees of
freedom (DoF) in the spatial mechanism, whereas
each wheel-ground contact point leaves three DoF
free (Koenen, 1983; Schwab et al., 2004).
Figure 1: Kinematics representation of a motorcycle
(Cossalter, 2014).
Considering the hypothesis of the pure rolling of tires
on the road to be valid, it is easy to ascertain that each
wheel, with respect to the fixed road, can only rotate
around (Farroni et al., 2019; Kooijman et al., 2011):
▪ The contact point on the wheel plane (forward
motion);
▪ The intersection axis of the motorcycle and road
planes (roll motion);
▪ The axis passing through the contact point and the
centre of the wheel (spin).
Figure 2: Degrees of Freedom of the schematized motorcycle model.
Non-linear Motorcycle Dynamic Model for Stability and Handling Analysis with Roll Motion and Longitudinal Speed Regulation
293
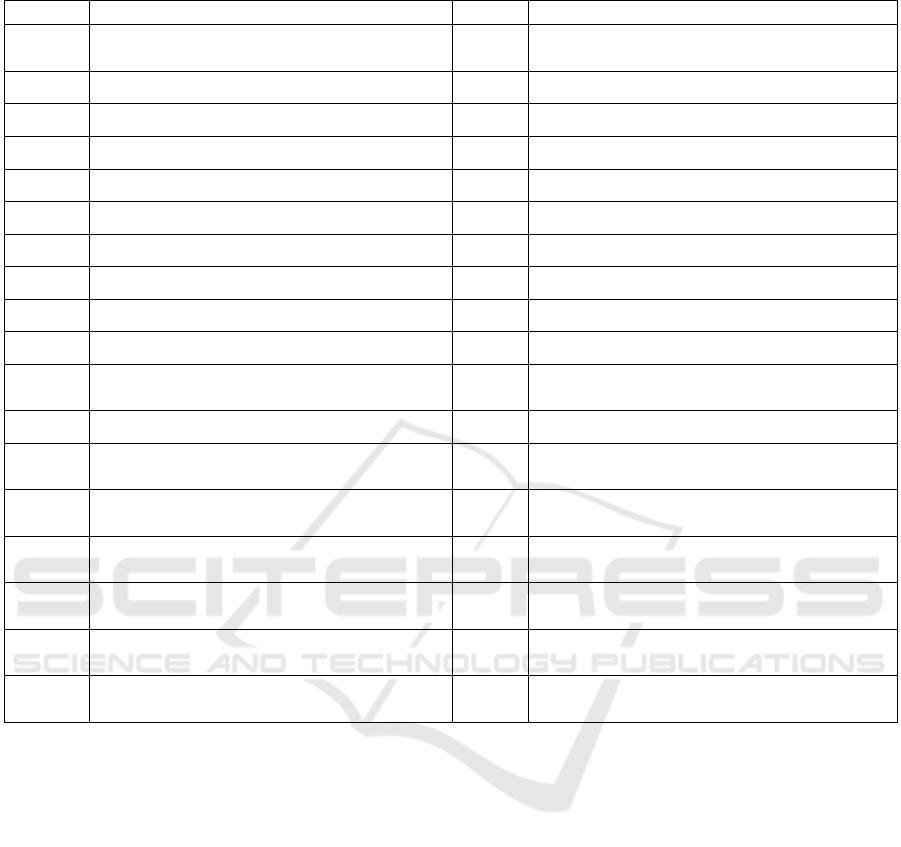
Table 1: List of symbols.
In conclusion, a motorcycle’s number of degrees
of freedom is equal to three, given that the fifteen DoF
inhibited by the three revolute joints and the six
degrees of freedom eliminated by the two wheel-
ground contact points must be subtracted from the
four rigid bodies’ twenty-four DoF, as summarized in
Fig. 2 ( Escalona et al., 2012; Lowell et al., 1982).
These three degrees of freedom may be associated
with three principal motions (Schwab et al., 2004; Yi
et al., 2009):
▪ Forward motion of the motorcycle (represented
by the rear wheel rotation);
▪ Roll motion around the straight line which joins
the tire contact points on the road plane;
▪ Steering rotation.
The rider manages all the three major movements,
according to his personal style and skill: the resulting
movement of the motorcycle and the corresponding
trajectory (e.g. a curve) depend on a combination, in
the time domain, of the three motions related to the
three degrees of freedom. This generates one
manoeuvre, among the thousands possible, which
represents the personal style of the driver. These
considerations have been formulated assuming that
the tires move without slippage. However, in reality,
the tire movement is not just a rolling process. The
generation of longitudinal forces (driving and braking
forces) and lateral forces requires some degree of
slippage in both directions, longitudinally and
laterally, depending on the road conditions. The
number of degrees of freedom is therefore seven
(Dugoff et al., 1969; Pacejka, 2006; Rajput et al.,
2007; Seffen et al., 2001):
▪ Forward motion of the motorcycle;
▪ Rolling motion;
▪ Handlebar rotation;
▪ Longitudinal slippage of the front wheel
(braking);
▪ Longitudinal slippage of the rear wheel (thrust
or braking);
Symbol
Description
Symbol
Description
B
Rotation matrix between body-fixed refe-
rence frame and Euler-axis reference frame
R
nz
Translation of the centre of mass along the
z-axis
C
x
Longitudinal stiffness of tires
T
Kinetic energy
C
α
Lateral stiffness of tires
T
di
Driving torque input
F
x
Longitudinal force of tires
V
Potential energy
F
y
Lateral force of tires
V
F
Vehicle forward velocity
F
z
Vertical force of tires
V
n
Centre of mass velocity
g
Gravity acceleration
v
r
Reference velocity
h
G
Centre of mass height
v
Acquired velocity
I
Mass moment of inertia tensor
x
G
Centre of mass coordinate along the x-axis
k
d
Coefficient for derivative term
α
Tire sideslip angle
k
Coefficient for integral term
γ
e
Rotational coordinates provided by the
Euler Angles
k
Coefficient for proportional term
ε
x
Longitudinal slip ratio of tires
m
Motorcycle mass
θ
Rotation of the centre of mass around the y-
axis
Q
Non-conservative force acting on the
system
μ
max
Maximum friction coefficient
Generalized coordinate
φ
Rotation of the centre of mass around the z-
axis
R
c
Turn radius
ψ
Rotation of the centre of mass around the x-
axis
R
nx
Translation of the centre of mass along the
x-axis
Ω
Angular yaw rate
R
ny
Translation of the centre of mass along the
y-axis
ω
e
Angular velocity in the Euler axis-frame
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
294

▪ Lateral slippage of the front wheel;
▪ Lateral slippage of the rear wheel.
This kinematic study refers to a rigid motorcycle,
without suspensions and with the wheels fitted to
non-deformable tires, schematized as two toroidal
solid bodies with circular sections (Leonelli et al.,
2015; Pacejka et al., 1991).
3 MOTORCYCLE DYNAMIC
MODEL
The dynamic model of the motorcycle has been
derived with the specific goal of a model simple but
able to capture all the dynamics relevant of two-
wheeled vehicles. For these purposes, this work
presents a four degrees of freedom model that
considers rear-wheel driving and the front wheel
steering; three of those DoF refer to in-plane
longitudinal, lateral and yaw vehicle body motions
whereas the last DoF refers to out-plane roll body
motion. Moreover, in this paper, a velocity tracking
and stability control for agile manoeuvres using
steering rotation and rear thrust as control inputs is
presented (Sakai, 1990).
The analytical equations of motion are given by
the Lagrangian approach: the result is a non-linear
second-order ordinary differential equation (ODE)
system in four unknowns: roll and yaw angles and the
centre of mass coordinates in the plane road. The
model considers both longitudinal and lateral forces
exerted by the tires and has as inputs the steering
torque and the rear wheel torque.
The motorcycle model’s assumptions are:
=
R
nx
R
ny
R
nz
ψ θ φ
(1)
The translational coordinates are the translation of
the centre of mass measured parallel to the axes of the
ground reference frame, whereas the rotational
coordinates are provided by the Euler angles:
γ
e
=
ψ
θ
φ
(2)
The angular velocity in the Euler-axis frame as
already stated is simply the time derivative of the
Euler angles:
ω
e
=
d
dt
γ
e
(3)
Using the Lagrange equation, the motion equation
can be obtained as:
d
dt
∂L(q
j
,q
j
)
∂q
j
∂L(q
j
,q
j
)
∂q
j
= Q
q
j
(4)
where L(q
j
,q
j
)=T(q
j
,q
j
)−V(q
j
) is the
Lagrangian function.
T=T(q
j
,q
j
) is the kinetic energy expressed in
terms of generalized coordinates q
j
and it is given by:
T=
1
2
V
n
T
m
V
n
+
1
2
T
B
T
I
B
(5)
Applying Lagrange’s equation, the equation of
motion of the model are:
mx+h
G
cos θ sin ψ θ
− x
G
sin ψ
−
h
G
sin θ cos ψψ−x
G
cos ψ
h
G
sin θ sin ψ ψ
2
+h
G
sin θ cos ψ θ
2
+ 2h
G
cos θ cos ψ θ
ψ= Q
x
(6)
my −h
G
cos θ sin ψ θ
x
G
cos ψ
+ h
G
sin θ sin ψψ−x
G
sin ψ
h
G
sin θ cos ψψ
2
+h
G
sin θ cos ψ θ
2
+2h
G
cos θ sin ψ θ
ψ]=Q
y
(7)
ψI
yy
+ mh
G
2
sin
2
θ + mx
G
2
−(I
yy
−I
zz
) cos
2
θ I
xz
cos θ
−h
G
mx
G
cos θθ
+ mx
G
cos ψ
h
G
sin θ sin ψy−mx
G
sin ψ
h
G
m sin θ cos ψx+
h
G
mx
G
−I
xz
sin θ θ
2
+h
G
2
m+I
yy
−I
zz
sin 2θ θ
ψ=Q
ψ
(8)
I
xx
+mh
G
2
θ
+
I
xz
cos θ −
h
G
mx
G
cos θ
ψ
+mh
G
cos θ
sin ψ x− cos ψ y
−
ψ
2
sin 2θ
2
I
yy
−I
zz
+h
G
2
m−h
G
mg sin θ =Q
θ
(9)
The mathematical model presented is a non-linear
Ordinary Differential Equation system which
depends on the front and rear lateral forces and on the
longitudinal.
To model the tire behaviour, it is possible to use
physical models, divided into:
▪ physical-analytical model: which are physical
models based on measurable physical
quantities that have a closed-form solution, as
described in (Romano et al., 2019);
▪ physical-numerical model: which are physical
models that have not a closed-form solution. In
this case, equations that regulate the
phenomenon are very complex and cannot be
solved analytically so that the problem is
solved by using a computer and therefore the
equation resolution is numerical.
Non-linear Motorcycle Dynamic Model for Stability and Handling Analysis with Roll Motion and Longitudinal Speed Regulation
295
Otherwise, it is possible to use interpolative
empirical models, based on experimentation but
which do not have a clear physical connotation. This
model approximates a series of data obtained
experimentally and generates a functional that
interpolates and fits these data. A well-known
empirical model is the Magic Formula (Dugoff et al.,
1969; Hans B. Pacejka, 2006). This model provides
an excellent fit for tire effort curves, which makes it
more suitable for vehicle motion simulations. But at
the same time, it provides a poor insight into tire
behaviour. On one hand, empirical models rely on
experimental measures to make the simulation more
accurate, and on the other hand, physical models rely
on physics to give more insight about tire behaviour.
In regards to the calculation of the forces at the
tire/road interface, complex multiscale friction
models (Genovese et al., 2019) are based on the
knowledge of the road surface and of the viscoelastic
properties of tire tread (Genovese et al., 2020). Here,
the Dugoff physical model to describe the friction
forces between the tire/road interface is adopted.
With a simple form, the Dugoff tire model can
calculate the longitudinal and lateral tire force under
pure longitudinal slip, pure side slip and combinate
longitudinal-side slip situation. Dugoff developed an
analytic model based on the classical analysis of Fiala
(Sakai, 1990). Dugoff in his model assumed a
constant friction coefficient and a constant vertical
load distribution. These assumptions give:
F
x
=C
x
ε
x
1+ε
x
f(λ)
(10)
F
y
=C
α
tan α
1+ε
x
f(λ)
(11)
In particular, λ and the function f(λ) are described as:
λ=
μ
max
F
z
1+ε
x
2
C
x
ε
x
2
+
C
α
tan α
2
(12)
f
λ
=
2−λ
λ λ<1
1 λ≥1
(13)
4 PROPORTIONAL INTEGRAL
DERIVATIVE LONGITUDINAL
CONTROLLER FOR SPEED
REGULATION
The input variables of the motorcycle model are the
steering angle and the driving torque at the rear
wheel. The steering angle assigned during the
simulation process, derives from experimental
acquisitions, whereas the driving torque input to
assign at the rear wheel has been evaluated through
the implementation of a Proportional-Integral-
Derivative (PID) controller, on the longitudinal
velocity.
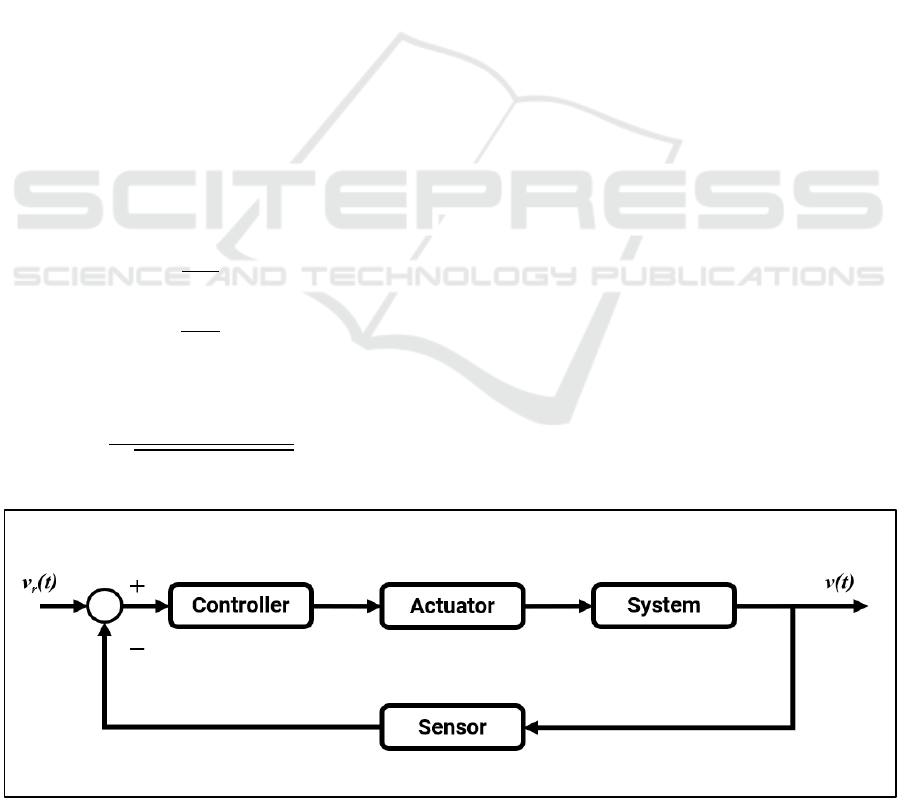
The PID controller is a closed-loop control
system. It requires a sensor that is able to measure the
controlled variable and sends the corresponding
information to the controller. The controller receives
as input the error made on the controlled variable, i.e.
between the velocity signal and the target velocity;
based on that error and using a proper control law
evaluates the control signal to be sent to the actuator
that applies the control force on the system in such a
way the controlled variable follows the reference.
The PID controller generates an output that is
given by the summation of three different contribute
that are respectively proportional to the error between
the reference signal and the output signal, to its
derivative and to its integral over time.
Therefore, the driving torque input assumes the
following form:
T
di
=k
p
v
r
t
−v
t
+k
d
v
r
t
−v
t
+k
i
v
r
t
−v
t
dt
t
0
(14)
Figure 3: Closed loop control system - block diagram.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
296
5 ROLL ANGLE STABILIZATION
Motorcycle is an unstable system that is kept in the
stable zone by its rider that acts as a feedback
controller acting on throttle, brake, steer, roll and by
moving himself on the seat influencing the centre of
gravity position, so the forces and the torques acting.
Reproducing the driver's behaviour with a math
model has always been very tricky since there are
many variables that must be taken into consideration.
Furthermore, there is no optimal strategy to adopt due
to the fact that it depends on parameters related to the
riding style of a specific riders.
Defining an optimal strategy for the roll motion
control is a hard and complex thing. The usual
approach is to balance the bike and to put it in the
stable zone at the beginning; then, once it is stable,
the body movement is controlled to exploit the best
grip and speed. Many difficulties figure out on that
strategy, for example, the body cannot be considered
as a point mass but should at least be schematized like
a solid with homogeneously distributed weight. Since
this control part requires a lot of time to be tuned and
to be simulated, the approach used here starts from
the ideal roll angle.
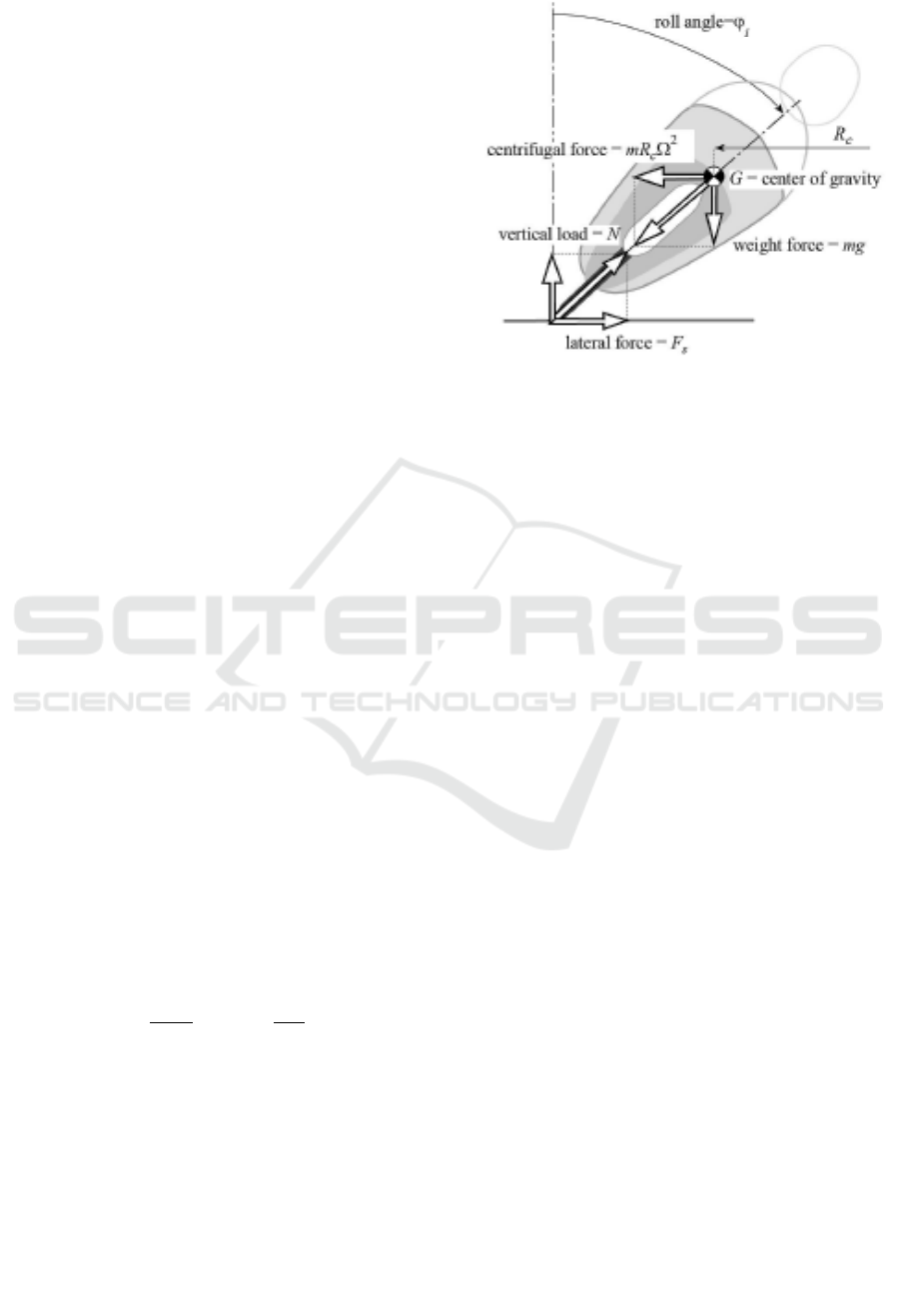
The motorcycle, in steady turning, is subject to
both a restoring moment, generated by the centrifugal
force that tends to return the motorcycle to a vertical
position, and to a tilting moment, generated by the
weight force, that tends to increase the motorcycle’s
inclination or roll angle.
The following simplifying hypotheses have been
introduced:
▪ the motorcycle runs along a turn of constant
radius at constant velocity (steady-state
conditions);
▪ the gyroscopic effect is negligible.
Considering the cross-section thickness of the tires to
be zero, the moments equilibrium allows to derive the
roll angle φ in terms of the forward velocity V
F
and
the radius of the turn R
c
(measured from the centre of
gravity to the turning axis):
φ = tan
-1
R
c
Ω
2
g
= tan
-1
V
F
2
gR
c
(15)
Where Ω indicates the angular yaw rate, while
V=ΩR
c
indicates the vehicle forward velocity.
In equilibrium conditions, the resultant of
centrifugal and weight forces passes through the line
joining the contact points of the tires on the road
plane. This line lies in the motorcycle plane if the
wheels have zero thickness and the steering angle is
very small.
Figure 4: Steady turning: roll angle equipped with zero
thickness tires (Cossalter, 2014).
In this work, therefore, to implement a control
system that allowed the roll angle stabilization for the
roll angle, the ideal roll angle is used as an input of
the model to ensure stability. The rider presence is
neglected, so no movement outside the plane of the
motorcycle is considered, but it has been assumed that
the rider rigidly attached to the saddle and always
remains in the plane of symmetry of the motorcycle.
Because of this assumption, the roll angle acquired by
experimental measures and the one derived by
imposing the steady turning conditions differ a bit
from each other.
6 RESULTS
The data obtained from the model have been
compared with those obtained from the experimental
acquisitions given by a high-performance motorcycle
manufacturing company; the industrial partner also
provide all the information necessary to parametrize
the model properly. The results have been then
normalized for reasons of confidentiality.
The model inputs are the steer angle and the rear
torque that were evaluated by the PID controller that,
on the error between the target velocity and the
measured velocity, applied a driving torque to the rear
wheel of the motorcycle. For this reason, the profile
velocity that is obtained is quite close to the velocity
acquired experimentally, as illustrated in Fig. 5.
Non-linear Motorcycle Dynamic Model for Stability and Handling Analysis with Roll Motion and Longitudinal Speed Regulation
297

Figure 5: Velocity profile comparison.
It can be noticed that the roll angle of the model
is globally greater than that acquired experimentally
as expected since the rider is considered to be rigidly
attached to the saddle and can’t move his entire
bodies to the interior of the turn to reduce the roll
angle of the motorcycle.
Figure 6: Roll angle comparison.
Moreover, there is a good match on the
longitudinal force at the rear wheel and on the
longitudinal acceleration between the model and the
acquired data as shown in Fig. 7 and Fig. 8.
Figure 7: Longitudinal force comparison.
As it is possible to see in those figures, the model
replies longitudinal force and acceleration correctly
in all the dynamic conditions, except for the high
acceleration zones; this is mainly due to the
simplification introduced in the motorcycle
schematization and parametrization.
Figure 8: Longitudinal acceleration comparison.
7 CONCLUSIONS
In the present work, the mathematical model of a
motorcycle with four degrees of freedom has been
presented. The study has been carried out under the
hypotheses of considering the front wheel steering
and the rear wheel driving and braking. Any motion
of the rider has been neglected, therefore the roll
angle assigned during the simulation is equal to the
ideal roll angle evaluated for the steady-state
conditions. To simulate the behaviour of a driver who
tries to reach a certain velocity has been implemented
a proportional-integral-derivative controller PID
which according to the error between the target
velocity and the measured velocity apply a driving
torque to the rear wheel of the motorcycle. For tire
modelling, a physical model to describe the friction
forces between the tire/road interface has been
adopted, which is the Dugoff tire model.
The comparison has shown good reliability of the
proposed model especially for what concerns the
longitudinal dynamics, although have been found
some differences between the lateral forces due to the
basic hypotheses for the model of considering the
ideal roll angle and to neglect any dynamic due to the
rider behaviour.
The availability of non-linear equations
represents an advantage with respect to the classical
Jacobian linearization approach commonly used in
literature. The model can be employed with an
advanced non-linear model-based control system
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
298

design and it can also be easily implemented on board
thanks to its simplicity and robustness.
Further developments may consist in the
realization of a more complex motorcycle model,
considering it as a multi-body system of four bodies:
the front and rear wheels, the rear assembly
(including frame, engine and fuel tank), the front
assembly (including steering column, handle-bar, and
front fork). Moreover, a suspension system at the
front and at the rear could also be considered; in this
way, it could be analyzed the degrees of freedom of
the motorcycle in the longitudinal plane such as the
pitch motion and the vertical displacement.
The model developed could also be completed
with a rider leaning model for the roll stabilization. In
particular, it could be implemented a rider control in
which the rider tries to stabilize the motorcycle by
inclining left and right his upper body in such a way
to not consider the roll angle fixed to its steady-state
value, in order to have a better description of
transverse dynamics.
REFERENCES
Bruni, S., Meijaard, J. P., Rill, G., Schwab, A. L., 2020.
State-of-the-art and challenges of railway and road
vehicle dynamics with multibody dynamics
approaches. Multibody System Dynamics, 49(1).
Cossalter, V., 2014. Motorcycle dynamics. Lulu.com.
Cossalter, V., Lot, R., 2002. A motorcycle multi-body
model for real time simulations based on the natural
coordinates approach. Vehicle System Dynamics, 37(6),
423–447.
Dugoff, H., Fancher, P. S., Segel, L., 1969. Tire
Performance Characteristics Affecting Vehicle
Response to Steering and Braking Control Inputs.
Escalona, J. L., Kłodowski, A., Muñoz, S., 2018. Validation
of multibody modeling and simulation using an
instrumented bicycle: from the computer to the road.
Multibody System Dynamics, 43(4), 297–319.
Escalona, J. L., Recuero, A. M., 2012. A bicycle model for
education in multibody dynamics and real-time
interactive simulation. Multibody System Dynamics,
27(3), 383–402.
Farroni, F., Russo, M., Sakhnevych, A., Timpone, F., 2019.
TRT EVO: Advances in real-time thermodynamic tire
modeling for vehicle dynamics simulations.
Proceedings of the Institution of Mechanical Engineers,
Part D: Journal of Automobile Engineering, 233(1),
121–135.
Farroni, F., Sakhnevych, A., Timpone, F., 2019. A three-
dimensional multibody tire model for research comfort
and handling analysis as a structural framework for a
multi-physical integrated system. Proceedings of the
Institution of Mechanical Engineers, Part D: Journal of
Automobile Engineering, 233(1), 136–146.
Genovese, A., Carputo, F., Maiorano, A., Timpone, F.,
Farroni, F., Sakhnevych, A., 2020. Study on the
Generalized Formulations with the Aim to Reproduce
the Viscoelastic Dynamic Behavior of Polymers.
Applied Sciences, 10(7), 2321.
Genovese, A., Farroni, F., Papangelo, A., Ciavarella, M.,
2019. A Discussion on Present Theories of Rubber
Friction, with Particular Reference to Different Possible
Choices of Arbitrary Roughness Cutoff Parameters.
Lubricants, 7(10), 85.
Genta, G., 1997. Motor Vehicle Dynamics. World Scientific
Publishing Co. Pte. Ltd.
Gillespie, T. D., 1996. Fundamentals of Vehicle Dynamics
- Thomas D.Gillespie (pp. 1–294).
Herlihy, D. V., 2004. Bicycle : the history. Yale University
Press.
Koenen, C., 1983. The dynamic behaviour of a motorcycle
when running straight ahead and when cornering.
Kooijman, J. D. G., Schwab, A. L., 2011. A review on
handling aspects in bicycle and motorcycle control.
Proceedings of the ASME Design Engineering
Technical Conference, 4(PARTS A AND B), 597–607.
Leonelli, L., Mancinelli, N., 2015. A multibody motorcycle
model with rigid-ring tyres: Formulation and
validation. Vehicle System Dynamics, 53(6), 775–797.
Limebeer, D. J. N., Sharp, R. S., Evangelou, S., 2002.
Motorcycle steering oscillations due to road profiling.
Journal of Applied Mechanics, Transactions ASME,
69(6), 724–739.
Lowell, J., McKell, H. D., 1982. The stability of bicycles.
American Journal of Physics, 50(12), 1106–1112.
Pacejka, H. B., & Sharp, R. S., 1991. Shear Force
Development by Pneumatic Tyres in Steady State
Conditions: A Review of Modelling Aspects. Vehicle
System Dynamics, 20(3–4), 121–175.
Pacejka, H. B., 2006. Tire and Vehicle Dynamics.
Rajput, B., Bayliss, M., Transactions, D. C.-S., 2007. A
simplified motorcycle model. JSTOR.
Romano, L., Sakhnevych, A., Strano, S., Timpone, F.,
2019. A hybrid tyre model for in-plane dynamics.
Vehicle System Dynamics, 1–23.
Sakai, H., 1990. Study on Cornering Properties of Tire and
Vehicle. Tire Science and Technology, 18(3), 136–169.
Schwab, A. L., Meijaard, J. P., Papadopoulos, J. M., 2004.
Benchmark Results on the Linearized Equations of
Motion of an Uncontrolled Bicycle.
Seffen, K. A., Parks, G. T., Clarkson, P. J., 2001.
Observations on the controllability of motion of two-
wheelers. Proceedings of the Institution of Mechanical
Engineers, Part I: Journal of Systems and Control
Engineering, 215(2), 143–156.
Sharp, R. S., 1971. The Stability and Control of
Motorcycles. Journal of Mechanical Engineering
Science, 13(5), 316–329.
Sharp, R. S., Alstead, C. J., 1980. The Influence of
Structural Flexibilities on the Straight-running Stability
of Motorcycles. Vehicle System Dynamics, 9(6), 327–
357.
Non-linear Motorcycle Dynamic Model for Stability and Handling Analysis with Roll Motion and Longitudinal Speed Regulation
299

Sharp, R. S., & Limebeer, D. J. N., 2001. A Motorcycle
Model for Stability and Control Analysis. Multibody
System Dynamics, 6(2), 123–142.
Spierings, P. T. J., 1981. The Effects of Lateral Front Fork
Flexibility on the Vibrational Modes of Straight-
Running Single-Track Vehicles. Vehicle System
Dynamics, 10(1), 21–35.
Yi, J., Zhang, Y., Song, D., 2009. Autonomous motorcycles
for agile maneuvers, Part I: Dynamic modeling.
Proceedings of the IEEE Conference on Decision and
Control, 4613–4618.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
300
