Dual CNN-based Face Tracking Algorithm for an Automated Infant
Monitoring System
Cheng Li
a
, Genyu Song, A. Pourtaherian
b
and P. H. N. de With
c
Eindhoven University of Technology, Eindhoven, The Netherlands
Keywords:
Face Tracking, Online Updating, Infant Monitoring, Real-time Application.
Abstract:
Face tracking is important for designing a surveillance system when facial features are used as main descrip-
tors. In this paper, we propose an on-line updating face tracking method, which is not only suitable for specific
tasks, such as infant monitoring, but also a generic human-machine interaction application where face recog-
nition is required. The tracking method is based on combining the architecture of the GOTURN and YOLO
tiny face detector, which enables the tracking model to be updated over time. Tracking of objects is realized by
analyzing two neighboring frames through a deep neural network. On-line updating is achieved by comparing
the tracking result and face detection obtained from the YOLO tiny face detector. The experimental results
have shown that our proposed tracker achieves an AUC of 97.9% for precision plot and an AUC of 91.8% for
success plot, which outperforms other state-of-the-art tracking methods when used in the infant monitoring
application.
1 INTRODUCTION
Monitoring the comfort states of young infants for
certain disease diagnosis at a hospital is very im-
portant, because of their limited verbal ability to ex-
press their feelings. For better understanding of infant
behavior and moments of pain/discomfort, an auto-
mated video-based infant monitoring system can be
implemented by analyzing expressions as an auxil-
iary assessment tool. State-of-the-art infant monitor-
ing systems normally consist of three components,
face detection, landmark localization and discomfort
detection (Zamzmi et al., 2016) (Sun et al., 2018),
which is depicted in Fig.1. Since the system is com-
posed of cascaded stages, the final discomfort detec-
tion is strongly dependent on the accuracy of preced-
ing stages, e.g. face detection. However, face detec-
tion over the entire image is computationally expen-
sive, which hampers the possibility of a real-time ap-
plication. Therefore, a face tracking method is com-
monly used for video analysis when a face is detected.
When using face tracking, several challenges
for infant monitoring systems should be considered.
First, most state-of-the-art trackers are designed for
a
https://orcid.org/0000-0003-2900-637X
b
https://orcid.org/0000-0003-4542-1354
c
https://orcid.org/0000-0002-7639-7716
4. Discomfort
Detection
Detection
3. Landmark
Localization
2. Face
Tracking
1. Face
Figure 1: Block diagram of an infant discomfort detec-
tion/monitoring system with a face tracking step.
pedestrians, humans or vehicles, of which textures
typically undergo limited deformations and distor-
tions over time. However, infant expressions and
their head poses can change dramatically in adjacent
frames due to unexpected stimuli and fast head move-
ments, causing significant texture changes compared
to the tracking target. Hence, a generic object tracker
will fail to track infant faces when such situations
occur. Second, infants are normally monitored un-
der a complex environment, such as interacting with
their nearby patients. Therefore, multiple object in-
stances (faces of infants and parents) can coexist in
the search regions, which increases the ambiguity for
the designed object tracker. Last, some of state-of-
the-art trackers based on CNNs adopt complex ar-
chitectures, which require a considerable amount of
computations, thereby significantly increasing the im-
plementation burden of a real-time infant monitoring
application.
Li, C., Song, G., Pourtaherian, A. and N. de With, P.
Dual CNN-based Face Tracking Algorithm for an Automated Infant Monitoring System.
DOI: 10.5220/0010384308810887
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
881-887
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
881

In order to solve these challenges, a face online-
updated tracking algorithm aiming at integrating it
into an automated infant monitoring system is pro-
posed. This algorithm is designed based on com-
bining a GOTURN tracker (Held et al., 2016) and a
YOLO pre-trained infant face detector (Redmon et al.,
2016). Compared to state-of-the-art tracking methods
using reinforcement learning (Yun et al., 2017), the
architecture of GOTURN is adopted for its simplicity
and low computation requirements. The research in
this paper presents the following contributions.
1. The proposed tracker applies an online-updating
technique which combines GOTURN and the
YOLO tiny face detector. This novel combina-
tion has proven to outperform the individual sin-
gle components and other state-of-the-art trackers
when being used for the infant monitoring appli-
cation.
2. In order to thoroughly validate the performance of
the proposed tracker, a clinical dataset captured
from a local hospital and a consumer-oriented
dataset collected from Youtube are used for evalu-
ation purposes.
3. The experimental results of the proposed system
can achieve an execution speed comparable with
state-of-the-art tracking methods based on corre-
lation filtering.
This paper is organized as follows. Section 2 intro-
duces related work on several state-of-the-art track-
ing methods. Section 3 describes the proposed infant
face tracking algorithm. The tracking accuracy and
computation costs are evaluated in Section 4. Finally,
conclusions are presented in Section 5.
2 RELATED WORK
For decades, researchers have paid significant atten-
tion to object and face tracking. Tracking algo-
rithms can be categorized into conventional meth-
ods based on template matching (Comaniciu and
Meer, 2002), Bayesian inference (Van Der Merwe
et al., 2001) (Welch et al., 1995), correlation filter-
based tracking (Bolme et al., 2010) (Danelljan et al.,
2016a) (Danelljan et al., 2016b) (Henriques et al.,
2014), and CNN-based tracking (Nam and Han,
2016) (Li et al., 2018a) (Yun et al., 2017). Conven-
tional methods based on template matching usually
heuristically search objects according to pre-defined
templates. However, it has been demonstrated that
such techniques only perform well for a tracking tar-
get that can be represented by a simple feature model
(such as a ball with a unified color). Besides, these
trackers are likely to fail when obstacles occur near
the tracking target, which hampers their application
for complex tracking tasks.
Tracking methods based on correlation filtering
have become prevalent for addressing the drawbacks
of template-matching methods and apply a Fourier
Transform (FT) on both the target template (object
of interest) and search regions. In (Danelljan et al.,
2016b), the target template and search regions are rep-
resented by layers of features such as in one or more
CNNs. After this, a confidence map is calculated
from the FT of the template and the search regions
with a convolutional operation. Finally, the track-
ing target location in the search area is determined
with the highest confidence score based on a confi-
dence map. When tracking of the current frame is
succeeded, the target template is updated by the cur-
rent detection. However, this type of tracker lacks the
robustness of tracking the deformable objects, thereby
being less suited for infant face tracking.
Tracking methods based on CNN features have
shown a great success in recent years (Held et al.,
2016) (Nam and Han, 2016). The outstanding per-
formance of CNN-based tracking is explained by the
strong representation ability of CNN features. These
methods can be divided into two categories: (a) track-
ing in an off-line mode (Held et al., 2016) (Li et al.,
2018a) and (b) tracking with an on-line updating
scheme (Nam and Han, 2016) (Yun et al., 2017).
The framework of these CNN-based trackers accept
a target template and search regions as inputs of their
CNN architectures. Compared to conventional track-
ing methods and correlation filter-based trackers, ob-
ject tracking obtained by CNNs is realized by regres-
sion of CNN features instead of optimization. How-
ever, the aforementioned online-updated CNN track-
ers are designed to be generic for various objects,
which lack the specificity for tracking infant faces,
thereby making it difficult to use directly in an in-
fant monitoring system. This paper proposes a CNN-
based online-updating tracking method specifically
targeting at infant faces, which combines GOTURN
and the YOLO tiny face detector. The CNN features
used for tracking can also be shared with infant ex-
pression analysis, and are therefore compatible with
a general infant monitoring system and other generic
human-machine interaction applications.
3 SYSTEM DESIGN
This section discusses the architecture of the proposed
online-updating tracking method and the training pro-
cedure in more detail.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
882

Search region
Crop
Resize
Target region
Conv layers
Face detector
YOLOv3 tiny
FC layers
Bbox
update
Bbox
Conv layers
Weights
Crop
Resize
Current frame
Previous frame
current frame
Tracking result of
Figure 2: Architecture of the proposed online-updated
tracker based on the GOTURN and YOLO tiny face detec-
tor.
3.1 Architecture
When differentiating from tracking for a generic pur-
pose, a target-specific tracker can be more robust
and become less a complex CNN architecture, pro-
vided that it is trained with proper datasets. For
this reason, we utilize the same structure as in GO-
TURN (Held et al., 2016), and combine it with
AlexNet (Krizhevsky et al., 2012) because if offers
a shallow and fast network. The framework of the
target-specific on-line updated tracker is depicted in
Fig. 2. As shown, the input of the network con-
sists of a target patch and a cropped patch (search re-
gion), which are potentially containing the target to
be tracked. Here, the target is an infant face that is
detected from the previous frame, whereas the search
region is obtained through cropping the next frame.
The center of the search region is determined by the
target position, while its size is pre-defined accord-
ing to numerous experiments. To fulfill the input
size requirement of AlexNet, both target and search
patches are resized, and then go through their indi-
vidual convolution-layer branch to obtain the respec-
tive CNN features. In order to estimate the target in
the subsequent frame, CNN feature maps of the tar-
get and search patches are concatenated, and are then
supplied into Fully Connected (FC) layers. Finally,
the target location is computed from the output of the
last FC layer.
Probably caused by the computational efficiency
of AlexNet, it provides less robustness when infants
heavily rotate their head in a video sequence. In this
case, the tracker can easily lose the target. To ad-
dress the non-rigid deformation caused by rapid head
movements, a YOLOv3 face detector is added for the
potential face detection in the search region to update
the network. The bounding box from the face detec-
tor is considered as ground truth for fine- tuning the
network and therefore adapting the network to the in-
fant facial deformation over time. In this work, only
the weights of the last FC layer are fine-tuned to allow
online updating.
3.2 Training
3.2.1 Input of Network
To address the challenge of multiple persons pre-
sented in video sequences, an image patch for search-
ing the infant face is cropped from the current frame,
denoted as F
t
. The center of the cropped patch is
located at the position of the detected face from the
previous frame, denoted as F
t−1
. Assuming the de-
tected bounding box containing the face has a center
c(x, y), then the width and the height of the bounding
box are represented as w and h, respectively. Then,
in the actual frame F
t
, the search region is cropped
with k times on the bounding box of the previous
frame, where k is a scale factor indicating the size of
the search region. Here, the value of k is empirically
determined. In order to avoid too much background
noise encompassed in the search area, we have set
k = 2 for balancing the computational overhead and
the tracking accuracy.
3.2.2 Loss Function
The loss is computed from the output of the last FC
layer and the ground-truth bounding-box coordinates.
Here, the L1 loss is chosen, denoted by L
1
, because
it is easy to compute and also proved to be reliable
against outliers. The loss function L is computed by:
L =
∑
i
L
1
(m
i
− m
∗
i
), (1)
where m
i
denotes the coordinates (x
1
, y
1
, x
2
, y
2
) of
the top-left and bottom-right corners of the predicted
bounding box by the tracking network and m
∗
i
rep-
resents the corresponding coordinates of the ground-
truth bounding box.
3.2.3 Training Configuration
Because of the limited availability of video sequences
for training, the weights of convolutional layers are
first trained with ImageNet data (Deng et al., 2009).
After that, the whole network is fine-tuned with our
training video sequences containing infants, in which
the weights of the FC layers are initialized by sam-
pling from a Gaussian distribution with zero mean and
standard deviation of 0.01. Furthermore, a Stochastic
Gradient Descent (SGD) is used for optimizing the
network parameters with a base learning rate of 0.001
and a momentum of 0.9. The final FC layer outputs
the coordinates of the bounding box predicted by the
tracking network.
Dual CNN-based Face Tracking Algorithm for an Automated Infant Monitoring System
883

3.2.4 On-line Updating Process
In order to address the deformations of infant faces
over time, an online adaptation technique is utilized.
To maximally reduce the computational requirement,
only the weights of the last FC layer are updated. The
loss function used for updating the weights is identi-
cal to the specification of Eq. (1), where only m
∗
i
rep-
resents the coordinates of the bounding box detected
from the YOLO tiny network in this stage.
4 EXPERIMENTS
In this section, we first introduce the databases used
for training and testing for the proposed tracking
method. Then we describe the applied evaluation
metrics. Finally, the experimental results of the infant
face tracking are provided.
4.1 Database
The dataset used for this work contains 73 video
sequences in total, which can be divided into two
subsets. One subset contains 11 video sequences
that were recorded at the Maxima Medical Center
(MMC), Veldhoven, the Netherlands, whereas the
other subset consists of 62 video sequences that were
collected from YouTube. Video sequences recorded
at the MMC comply with the ethical standards, and
allow usage for experiments after obtaining a written
consent. In this subset, each video sequence lasts at
least 2 minutes for meeting the requirements for infant
pain assessment. Furthermore, the length of video se-
quences in the YouTube subset lasts from 20 seconds
to 2 minutes.
For training the tracking network, 51 video se-
quences are selected which maximally encompass a
variety of challenging situations, such as large head
poses and object occlusions. In the training video
dataset, 8 videos are selected from the MMC sub-
set and 43 videos are taken from the YouTube subset.
The rest of the video sequences are then used as test-
ing datasets. In order to thoroughly compare the pro-
posed tracking network with state-of-the-art methods,
the testing dataset also contains the challenging cases
as earlier mentioned. Table 1 provides the number of
frames for the example video sequences in the testing
dataset.
4.2 Metrics
In order to evaluate the tracking accuracy, two metrics
from the Online Tracking Benchmark (OTB) (Nam
Table 1: Number of frames for the example video sequences
for the testing dataset used for evaluation of face tracking.
Video Id No. FRM Video Id No. FRM
MMC #001 1,175 Y-T #001 329
MMC #002 1,139 Y-T #002 1,108
MMC #003 1,752 Y-T #003 1,764
and Han, 2016) are used, which are the success plot
and the precision plot. These two metrics are specifi-
cally designed for evaluating and benchmarking the
overall performance of different tracking methods.
According to the definition, a success plot presents the
successful tracking rate in terms of overlap defined
by the Intersection over Union (IoU) ratios between
the detected and ground-truth bounding boxes. Alter-
natively, the precision plot provides the precision of
tracking methods in terms of the difference between
the center locations of the tracked bounding box and
the ground-truth bounding box, which is indicated as
a tracking error. In addition to the tracking accuracy,
the execution speed is also compared and expressed as
frame throughput rate (fps), for indicating the possi-
bility of implementing the tracking methods in a real-
time system.
4.3 Experimental Results
4.3.1 Tracking Accuracy
In this experiment, both conventional tracking meth-
ods (Grabner et al., 2008) (Kalal et al., 2010) (Hen-
riques et al., 2014) (Kalal et al., 2010) and state-
of-the-art deep learning-based tracking methods (Li
et al., 2018b) (Held et al., 2016), are evaluated and
compared with our proposed approach. When apply-
ing the conventional methods to the testing video se-
quences, the tracking target is initialized every 100
frames regardless of the outcome of the tracker, since
they are less robust to situations when tracking targets
suddenly and significantly deviate from their previous
position. Instead, for the deep learning-based method,
only the first frame of each sequence is initialized and
then tracking is sustained till the end of the sequence.
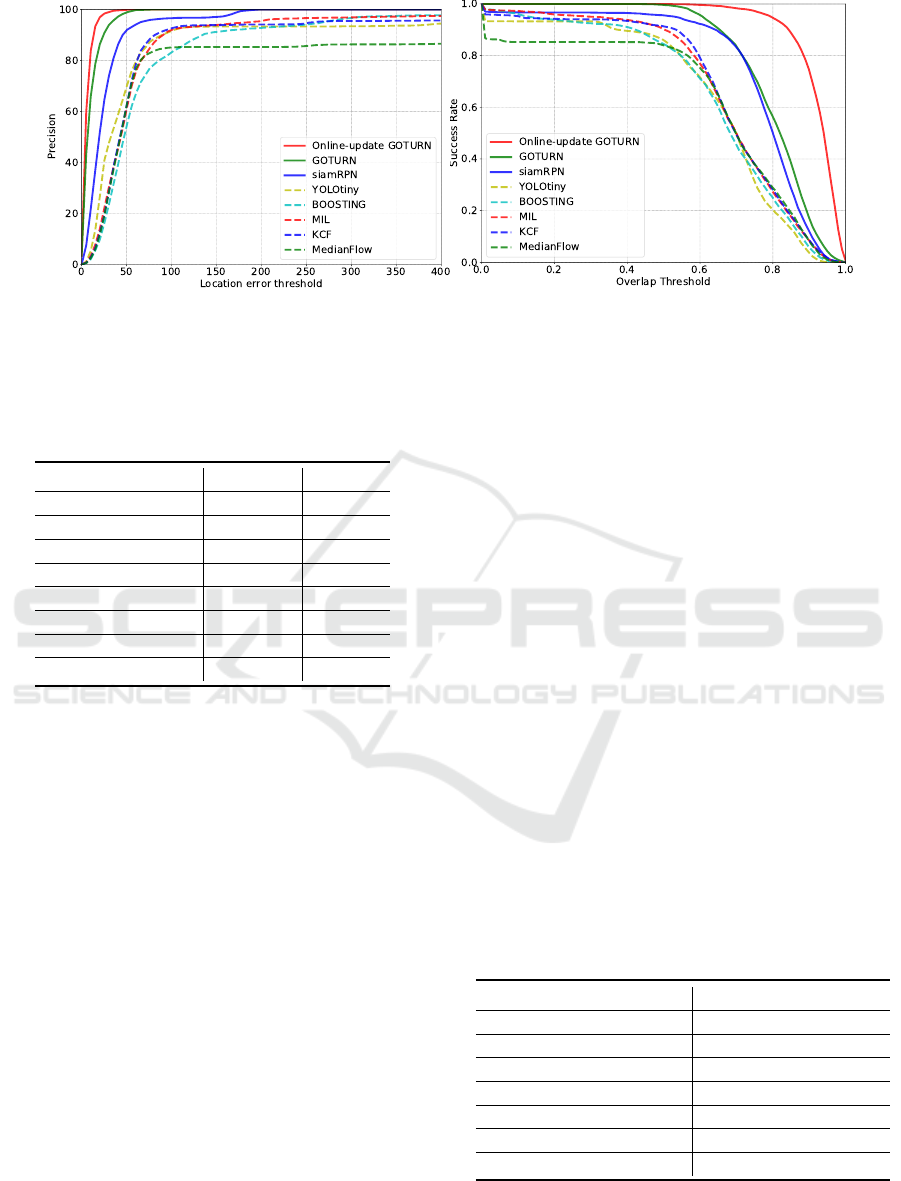
Fig. 3 shows the success plot and the precision
plot for all the utilized tracking methods, evalu-
ated with our infant test video sequences. It can
be observed that the correlation filter-based tracker
(KCF) (Henriques et al., 2014) outperforms other
conventional tracking methods (MIL, Boosting and
MedianFlow) (Babenko et al., 2009) (Grabner et al.,
2008) (Kalal et al., 2010), due to its online up-
dating process of the target template. However,
the CNN-based tracking methods (GOTURN and
SiamRPN) (Held et al., 2016) (Li et al., 2018b) out-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
884
(a) (b)
Figure 3: Performance for all the tracking methods used for comparison evaluated with the test infant datasets. (a) Precision
plot; (b) Success plot.
Table 2: Area under curve (AUC) of precision plot and suc-
cess plot evaluated with the testing infant datasets for all the
tracking methods. Boldface indicates the highest number.
Tracking methods Precision Success
Online-GOTURN 0.979 0.918
GOTURN 0.969 0.800
SiamRPN 0.927 0.765
YOLOtiny 0.838 0.640
Boosting 0.817 0.654
MIL 0.847 0.682
KCF 0.841 0.680
MedianFlow 0.768 0.630
performs the evaluated conventional methods with a
higher accuracy. It should be noted that the proposed
on-line updating tracking method achieves the high-
est performance evaluated with both the success plot
and the precision plot. Furthermore, Table 2 shows
the Area Under the Curve (AUC) values for both suc-
cess plot and precision plot. It can be readily noticed
that the proposed tracking method achieves an AUC
of 97.9% and an AUC of 91.8% for success plot and
precision plot, respectively, which performs the best
compared with all the evaluated trackers for the in-
fant face tracking application. Particularly, the pro-
posed method is compared with both the GOTURN
and the YOLO tiny face detector, where the proposed
combined tracking outperforms any of its individual
components. Fig. 4 portrays the tracking results ob-
tained by different tracking approaches when being
used for infant face tracking.
When implementing different tracking methods
for evaluation, we have noticed that KCF and MIL
can only be reliable when an infant face is frontal and
static. Unfortunately, when the infant heads signifi-
cantly deviate from the frontal view, such as with a
head rotation from frontal to profile view, these track-
ers are more likely to fail, due to the facial texture
changes. This failure can be explained by the aspect
that their tracking updating solution is less descrip-
tive for the texture changes between frontal and pro-
file views. However, our proposed on-line updating
tracking network is pre-trained with various views.
Furthermore, the on-line network updating technique
also allows it to model the deformations of the fa-
cial appearance between frames, which explains the
high performance of the proposed tracking method.
As a result, the high accuracy for the tracking of faces
makes the proposed tracking method suitable for inte-
grating it in a face-related human-machine-interaction
system.
4.3.2 Execution Speed
In addition to the tracking accuracy, the execution
speed is also evaluated. Table 3 presents the exe-
cution speed of each tracker of interest. It is clear
that KCF has the lowest speed as 11 fps, and Me-
dianFlow achieves the highest as 128 fps. Even
Table 3: Execution speed for each tracker operated on an
Xeon(R) CPU E5-2609 v2 @ 2.50 GHz with octal CPU
core.
Tracking method Execution speed (fps)
Boosting 27
MIL 21
KCF 11
MedianFlow 128
SiamsRPN 30
GOTURN 50
Online updated tracking 13
though the speed of MedianFlow is appealing, it lacks
the robustness against large head rotations and oc-
Dual CNN-based Face Tracking Algorithm for an Automated Infant Monitoring System
885

Frame #1 Frame #50 Frame #100 Frame #150 Frame #1 Frame #50 Frame #100 Frame #150
Figure 4: Examples of tracking results on frames within sequences from the testing dataset obtained by three CNN-based
tracking methods. Yellow boxes represent the ground truth, green boxes indicate tracking results by GOTURN, blue boxes
show the outputs from SiamsRPN and red boxes present the results obtained by our proposed method.
clusions. Compared with the conventional methods,
the CNN-based trackers generally require more com-
putation time, due to their high model complexity.
However, the CNN-based trackers are demonstrated
to provide higher robustness on discontinued texture
changes and occlusions compared to conventional
methods. Therefore, the frequency of target initializa-
tion is much lower than with conventional methods.
As shown, the speed of the proposed on-line updating
tracking is slower than SiamsRPN and GOTURN, due
to the overhead computation of online weight-factor
updating and the parallel structure of the YOLO tiny
face detection. Therefore, the proposed tracker ob-
tains high tracking accuracy at the cost of a lower
execution speed. Nevertheless, the speed of the pro-
posed tracking method is still feasible for implement-
ing an infant monitoring system. Moreover, the con-
volutional layers in the tracking network can also be
shared with the expression detection when tracking
and detection are trained in an end-to-end fashion. It
is assumed that this reduces the computation overhead
induced by the additional face detector.
5 CONCLUSIONS
In this paper, we have proposed an on-line updating
tracking method aiming at infant face tracking, based
on combining the architecture of the GOTURN and
a YOLO tiny face detector. The proposed solution
can also be reused for other human-machine inter-
action applications. The tracking position of an ob-
ject is obtained by analyzing two neighboring frames
through a deep neural network, where the network is
on-line updated by comparing the tracking output and
a detection provided by the YOLO tiny face detec-
tor. The experimental results have shown that our pro-
posed tracker achieves an AUC of 97.9% for precision
plot and an AUC of 91.8% for success plot, which
outperforms not only its single components, but also
other state-of-the-art tracking methods when used in
this application. Although the execution speed is less
competitive than other evaluated trackers, the overall
computation complexity can be further reduced when
using this tracker in an infant monitoring system or
other face-related applications, since the parameters
of the network can be shared for other detection pur-
poses. For future work, we will integrate this track-
ing method in an facial surveillance application, and
jointly train the face tracking and recognition in one
framework.
REFERENCES
Babenko, B., Yang, M.-H., and Belongie, S. (2009). Vi-
sual tracking with online multiple instance learning.
In 2009 Proc. IEEE Conf. Comput. Vis. Pattern Recog-
nit., pages 983–990. IEEE.
Bolme, D. S., Beveridge, J. R., Draper, B. A., and Lui, Y. M.
(2010). Visual object tracking using adaptive correla-
tion filters. In 2010 Proc. IEEE Conf. Comput. Vis.
Pattern Recognit., pages 2544–2550.
Comaniciu, D. and Meer, P. (2002). Mean shift: A robust
approach toward feature space analysis. IEEE Trans-
actions on Pattern Analysis & Machine Intelligence,
(5):603–619.
Danelljan, M., Bhat, G., Khan, F. S., and Felsberg, M.
(2016a). ECO: efficient convolution operators for
tracking. CoRR, abs/1611.09224.
Danelljan, M., Robinson, A., Shahbaz Khan, F., and Fels-
berg, M. (2016b). Beyond correlation filters: Learning
continuous convolution operators for visual tracking.
In ECCV.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). ImageNet: A Large-Scale Hierarchical
Image Database. In CVPR09.
Grabner, H., Leistner, C., and Bischof, H. (2008). Semi-
supervised on-line boosting for robust tracking. In
ECCV, pages 234–247. Springer.
Held, D., Thrun, S., and Savarese, S. (2016). Learning to
track at 100 fps with deep regression networks. In
ECCV.
Henriques, J. F., Caseiro, R., Martins, P., and Batista, J.
(2014). High-speed tracking with kernelized correla-
tion filters. IEEE Trans. Pattern Anal. Mach. Intel,
37(3):583–596.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
886

Kalal, Z., Mikolajczyk, K., and Matas, J. (2010). Face-tld:
Tracking-learning-detection applied to faces. In 2010
IEEE International Conference on Image Processing,
pages 3789–3792. IEEE.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Advances in neural information process-
ing systems, pages 1097–1105.
Li, B., Yan, J., Wu, W., Zhu, Z., and Hu, X. (2018a). High
performance visual tracking with siamese region pro-
posal network. In Proc. IEEE Conf. Comput. Vis. Pat-
tern Recognit., pages 8971–8980.
Li, B., Yan, J., Wu, W., Zhu, Z., and Hu, X. (2018b). High
performance visual tracking with siamese region pro-
posal network. In Proc. IEEE Conf. Comput. Vis. Pat-
tern Recognit.
Nam, H. and Han, B. (2016). Learning multi-domain con-
volutional neural networks for visual tracking. In
2016 Proc. IEEE Conf. Comput. Vis. Pattern Recog-
nit., pages 4293–4302.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proc. IEEE Conf. Comput. Vis. Pattern
Recognit., pages 779–788.
Sun, Y., Shan, C., Tan, T., Long, X., Pourtaherian, A.,
Zinger, S., and de With, P. H. N. (2018). Video-based
discomfort detection for infants. Mach. Vis. Appl.
Van Der Merwe, R., Doucet, A., De Freitas, N., and
Wan, E. A. (2001). The unscented particle filter. In
Advances in neural information processing systems,
pages 584–590.
Welch, G., Bishop, G., et al. (1995). An introduction to the
kalman filter.
Yun, S., Choi, J., Yoo, Y., Yun, K., and Choi, J. Y.
(2017). Action-decision networks for visual tracking
with deep reinforcement learning. In 2017 Proc. IEEE
Conf. Comput. Vis. Pattern Recognit., pages 1349–
1358.
Zamzmi, G., Pai, C., Goldgof, D., Kasturi, R., Ashmeade,
T., and Sun, Y. (2016). An approach for automated
multimodal analysis of infants’ pain. In 2016 23rd Int.
Conf. Pattern Recognit. (ICPR), pages 4148–4153.
Dual CNN-based Face Tracking Algorithm for an Automated Infant Monitoring System
887
