
A Real-time and Energy-aware Framework for Data Stream Processing
in the Internet of Things
Egberto A. R. de Oliveira
1
, Flavia C. Delicato
2
, Atslands R. da Rocha
3
and Marta Mattoso
1
1
PESC/COPPE, Universidade Federal do Rio de Janeiro, Rio de Janeiro, RJ, Brazil
2
Instituto de Computac¸
˜
ao, Universidade Federal Fluminense, Niter
´
oi, RJ, Brazil
3
Universidade Federal do Cear
´
a, Fortaleza, CE, Brazil
Keywords:
IoT, Internet of Things, Data Streams, Data Stream Processing, Edge Computing, Adaptive Sampling.
Abstract:
The Internet of things (IoT) has transformed the internet, enabling the communication between every kind of
objects (things). The growing number of sensors and smart devices increased the possibilities of data gen-
eration and collection. This led to an explosion of data streams being produced which are challenging to be
processed in real-time. Regarding the nature of the data, the huge volume, heterogeneity, continuity, disor-
dering, noise and unpredictable rate are some challenging aspects to tackle. Regarding the data processing,
the core activities from the data acquisition to the production of high-level knowledge also pose challenges
related to limited computational and energy resources and high network latency. In this context, we propose
a framework to support activities of a data stream processing workflow for IoT. It aims allowing real-time
data processing with low power consumption. Edge computing is used to bring the data processing closer to
the data sources and allow actions to be triggered quickly. An adaptive sampling strategy combined with a
data prediction model are adopted to reduce the network traffic, thus decreasing the power consumption of
the network devices. Experiments show that the proposed framework is able to achieve up to 60.58% average
energy consumption savings to sensor nodes and still meet a strict execution time threshold of 1s without
compromising the accuracy of the output data on different scales of input streams.
1 INTRODUCTION
The Internet of things (IoT) is transforming the in-
ternet, enabling the communication between every
kind of object (things) and creating a vision of “any-
time, anywhere, any media, anything” communica-
tions (Atzori et al., 2010). Initially, IoT was mainly
obtained by the use of RFIDs, nowadays such a con-
cept has evolved to a broader view that refers to the
interconnection of sensors, actuators, smart objects,
and wireless sensor networks (WSN)(Akyildiz et al.,
2002). The growing number of sensors and smart de-
vices led to an explosion of volume, variety and ve-
locity of generated data, empowering a new way of
value creation to people and corporations (Dias de
Assunc¸
˜
ao et al., 2018). The processing of these “fire-
hoses” of data from existing and emerging applica-
tions poses several challenges and brings novel re-
search opportunities.
The challenges involved in IoT data stream pro-
cessing may be analyzed at least from two dimen-
sions: (i) the data itself (generated by heterogeneous,
distributed and often constrained devices), and (ii) the
data processing, i.e. the core activities from the data
acquisition to the production of high level knowledge.
Regarding the nature of the data, IoT de-
vices/sensors generate, possibly in a continuous way,
a huge amount of data, typically consisting of time-
series values, which are sampled over a specific time
period, thus characterizing a data stream (Karkouch
et al., 2016). Often, there is no control over the or-
der or frequency of streamed data, which is transient
or non-persisted. The input rate of a data stream is
unpredictable and bursty in nature, ranging from a
few bytes to several gigabits per second. In addi-
tion, the data is highly heterogeneous, as it is gen-
erated by multiple types of devices, in different for-
mats and to feed a wide range of applications, also
heterogeneous. Besides the potentially massive vol-
ume of data, an IoT environment is also character-
ized by high dynamism and volatility. In many IoT
applications, such as traffic accident monitoring or
river flooding prediction, the potential value of data
depends on its timely processing, under strict time
R. de Oliveira, E., Delicato, F., R. da Rocha, A. and Mattoso, M.
A Real-time and Energy-aware Framework for Data Stream Processing in the Internet of Things.
DOI: 10.5220/0010370100170028
In Proceedings of the 6th International Conference on Internet of Things, Big Data and Security (IoTBDS 2021), pages 17-28
ISBN: 978-989-758-504-3
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
17

requirements. Otherwise, the processing results and
actions become less valuable or even worthless. Fi-
nally, quality-related data features also need to be
considered. According to Qin et al. (Qin et al.,
2016), data quality in IoT considers the following
features: (i) uncertainty, (ii) ambiguity and incon-
sistency, (iii) incompleteness, and most of them are
a direct consequence of the data being produced by
sensors. Sensors are fail-prone devices. Information
and decisions derived from raw data generated by sen-
sors will also be subject to failure (Klein and Lehner,
2010). Therefore, identifying errors/inconsistencies
on a sensor generated data stream is crucial to im-
prove the accuracy of the data being processed. These
errors/inconsistencies are called outliers, which are
readings considered outside the regular state of the
data being collected. Data points that differ signifi-
cantly from others in a data set can represent either er-
rors or events of importance to the application (Kark-
ouch et al., 2016).
Regarding the data processing, the demand for
computational resources capable of processing large
volumes of data has historically been an obstacle for
creating high volume and/or high speed data process-
ing solutions (Dautov et al., 2018). Because of the
huge availability of resources offered by cloud com-
puting platforms, cloud-based approaches are widely
adopted in IoT systems. The data is pushed to the
cloud to be processed and the outcome is delivered
back to the local system. However, the internet back-
bone is not always able to meet the real-time require-
ments to transport a huge amount of data coming at
a high speed. This creates a communication bot-
tleneck that leads to proposing non-cloud based al-
ternatives, to handle and process IoT generated data
streams(Janjua et al., 2019).
A promising approach recently emerged is Edge
Computing (Dautov et al., 2018). It consists of bring-
ing the data processing activities physically closer to
the data sources. Edge computing is potentially use-
ful and has been adopted in several domains such
as smart buildings, healthcare, autonomous vehicles,
and environmental monitoring. In these applications,
data is processed by an edge device such as a smart
gateway, to extract meaningful information from it
and take necessary actions immediately (Janjua et al.,
2019), thus preserving the usability of time-sensitive
data. Therefore, with the support of edge comput-
ing, some of the activities of a data stream process-
ing workflow can be performed by devices at the edge
of the network. Other activities, more demanding in
terms of processing, may continue to be carried out in
the cloud. Still others can be performed on the sen-
sor device itself, that is, on the data sources since, al-
though restricted in terms of CPU and memory, such
sensors are capable of performing less complex pro-
cessing. In this context, another challenge arises re-
lated to data stream processing in IoT, which consists
of using the available resources in a rational way. In
addition to the restricted processing and communica-
tion capabilities, several sensor devices are powered
by non-rechargeable batteries. Keeping the sensors
working as long as possible is a major challenge in
all sensing-based systems, and it has been extensively
investigated in the WSN community.
In general, a basic strategy for preserving energy
in WSNs consists of: (i) keeping the nodes in hiber-
nation as long as possible and (ii) reducing the data
traffic in the network as much as possible. One strat-
egy called Adaptive Sampling (Anastasi et al., 2009)
simultaneously tries to do both by varying the inter-
val between samplings according to the behaviour of
the sensed data. Adaptive sampling methods might
not be suitable to sample physical phenomena with
sudden variations, which is a common characteristic
of data streams. However, this problem can be min-
imized when Adaptive Sampling is combined with
a data prediction model to compute estimated future
sensor readings (Monteiro et al., 2017).
In this work, we propose a framework which sup-
ports activities of a data stream processing workflow.
The framework aims at addressing the challenges of
real-time, power consumption and data accuracy. We
adopt the edge computing paradigm to deal with the
network bandwidth vs. data production bottleneck,
allowing for applications with real-time requirements.
We use adaptive sampling to reduce the network traf-
fic, and, as a consequence, the power consumption
of the sensor nodes. A data prediction model iden-
tifies and removes outliers producing an accurate ag-
gregate output. The main contributions of the pro-
posed framework are:
• To provide an energy-aware data gathering com-
ponent with adaptive sampling to reduce the net-
work traffic and, as a consequence, the power con-
sumption of the sensor nodes;
• To develop a data prediction model which takes
readings from multiple sensor nodes over a short
predefined window as inputs, applies a density-
based clustering algorithm to identify and remove
outliers and produces an accurate aggregated out-
put.
The major benefit expected by adopting the proposed
framework is being able to deploy long running real-
time processing systems on remote outdoor environ-
ments such as forests, open fields and watercrafts. In
such environments, there is no access to continuous
IoTBDS 2021 - 6th International Conference on Internet of Things, Big Data and Security
18

sources of electricity thus requiring the use of bat-
teries, solar panels or other types of limited power
sources.
The rest of this paper is organized as follows.
Section 2 presents relevant works which individually
tackle the issues we aim to solve together. Section 3
describes the proposed framework in details. Exper-
iments to evaluate the proposal is presented and dis-
cussed in Section 4. Finally, Section 5 concludes the
paper and provides additional information about the
ongoing and future work on this research.
2 RELATED WORK
Real-time/low latency response is an important and
very frequent requirement in IoT and Data Stream
Processing (DSP) applications (Li et al., 2015). A
recent survey on solutions for real-time processing
in big data streams (Mehmood and Anees, 2020)
points out there has been a growing number of pub-
lications on this topic during the last 10 years. The
study identifies in-memory computing, support to
non-structured or semi-structured data, low latency
and the usage of machine learning algorithms, among
others, as key challenges on this field. The authors
conclude that there is a lack of flexibility in the avail-
able solutions, since they are too specific for the use
cases they were designed to tackle. In addition, the
survey states that cloud-based approaches still rep-
resent the majority of current solutions analyzed. It
is important to mention that the quality of the out-
put data is always a major concern while energy con-
sumption do not appear among the challenges or ob-
jectives of the evaluated solutions for real-time data
stream processing.
Another recent survey on IoT architecture chal-
lenges (Samizadeh Nikoui et al., 2021) highlights en-
ergy efficiency as one of the major concerns when
designing IoT systems. Time efficiency (real-time
or near real-time responses) is also mentioned as an
important and frequent requirement. Quality aware-
ness can also be inferred as a key aspect for IoT ar-
chitectures since data integrity and accuracy concerns
are present in most of the described approaches. The
study, in turn, does not explicitly correlate energy and
time efficiency on the analyzed solutions in any way.
In order to find this correlation, we cross checked the
lists of publications addressing energy and time ef-
ficiency. From the 29 works listed on this survey,
only 4 aim at tackling both energy and time efficiency
together: the solutions proposed in (Xu and Helal,
2016) and (Catarinucci et al., 2015) are cloud-based
data stream processing solutions that rely on fully of-
floading the collected data to the cloud. As already
mentioned in section 1, this kind of approach leads to
a communication bottleneck which makes it impossi-
ble to meet strict low latency requirements. The ar-
chitecture described in (Loria et al., 2017) is an effec-
tive real-time stream processing solution which relies
on a robust infrastructure of servers on the edge. It
is not designed for constrained gateway devices and,
in fact, it does not address energy efficiency of gate-
ways or sensor nodes. OSCAR (Vu
ˇ
cini
´
c et al., 2014)
is not related to data stream processing. It is an en-
ergy efficient architecture for real-time communica-
tion (machine-to-machine and multicast) focusing on
security.
Despite relevant proposals addressing separately
the issues of real-time responses, data accuracy or
power consumption can be found in the field of data
stream processing for IoT, to the best of our knowl-
edge, no solution tackling these three concerns to-
gether has been found so far. This makes it difficult to
deploy solutions that can efficiently respond to real-
time events in power-constrained environments, such
as a forest fire suppression system, a malfunction de-
tection system on small ships, etc.
IRESE (Janjua et al., 2019) presents an outlier (so
called ”rare-event”) detection system that applies un-
supervised machine learning techniques at the edge
to quickly identify events on audio data streams. De-
spite the significant results achieved in terms of data
accuracy and real-time response, no concern regard-
ing energy consumption is mentioned. Therefore, this
solution might not be feasible on environments with
limited power sources, which is a major concern in
our work. In addition, IRESE was designed to han-
dle a very specific type of data: audio streams. Our
work is more agnostic and not restricted to a single
data type or use case.
Dual prediction techniques are presented in (Mon-
teiro et al., 2017), (Al-Hoqani and Yang, 2015) and
(Gupta et al., 2011). They are combinations of adap-
tive sampling with data prediction models based on
exponential time series. The core idea is based on a
set of lightweight calculations performed at the WSN
nodes. These computations allow the sensor nodes,
instead of delivering only a single sensor reading to
the sink, delivering a function that allows predicting
sensor readings in the time interval between the cur-
rent and the next reading. Data prediction models are
inserted in this context in order to avoid jeopardiz-
ing the quality of the data being generated, by the de-
crease in the sampling frequency. The main goal of
such a combined approach is finding a good balance
between the energy consumption and the quality of
the data being produced by a WSN. A common fea-
A Real-time and Energy-aware Framework for Data Stream Processing in the Internet of Things
19
ture observed on these works that employ dual predic-
tion schemes is the fact that their prediction models
are applied individually by each sensor. The frame-
work proposed in this paper differs from these works
since it considers the readings of a group of sensors.
It not only uses an aggregate function to predict data,
but it also identifies and eliminates incorrect readings
from its computations.
The works presented in this section propose ef-
fective solutions to address requirements of real-time
responses, data accuracy or power consumption, but
none of them tackle all these three concerns together.
Combining these three requirements in the same so-
lution is complex because the approach used to solve
one problem can negatively impact the solution of an-
other. For example, statistical methods based on in-
tensive computing can efficiently solve the problem
of lack of data accuracy but they demand a high en-
ergy consumption from the devices. The contribution
of our work consists of combining approaches such as
those described, promoting the necessary adaptations
so that the three requirements are jointly met.
3 A FRAMEWORK FOR DATA
STREAM PROCESSING IN IoT
There are many tools and platforms for ingesting, pro-
cessing, storing, and managing data streams, making
it a difficult task for professionals to select the right
combination to perform their analysis. The authors in
(Isah et al., 2019) identified the main components of a
modern data stream processing system (DSPS), which
can be integrated into a framework. A data stream
processing framework can be considered as a corner-
stone for guiding the building of DSPS, addressing all
the activities involved in the stream processing work-
flow (Isah et al., 2019). In our work, we consider
the general model for a DSPS framework proposed
by (Isah et al., 2019). It includes (i) a data stream in-
gestion layer, responsible for accepting data into the
DSPS; (ii) a data stream processing layer, which pre-
processes and analyzes data in one or more steps; (iii)
a persistence layer that stores, indexes and manages
the data and the generated knowledge; (iv) a resource
management layer, which coordinates the functions
of provisioning resources for data processing and its
communication with external applications; and (v) an
output layer that directs the output data to services and
applications.
3.1 Framework Components
In this work, we consider that IoT systems are orga-
nized in a three-tier architecture as described in (Li
et al., 2017). In such architecture, the bottom is the
Things tier and it comprises physical sensors, WSNs
and embedded devices, responsible for collecting data
from the monitored environment and feeding them to
the IoT system. Next comes the edge/fog tier com-
posed of devices located physically close to the things
and responsible for less compute intensive tasks such
as preprocessing the incoming data. The upper tier
is the cloud, encompassing robust devices (data cen-
ters) capable of handling more compute intensive pro-
cessing tasks and/or permanently storing relevant data
(archiving).
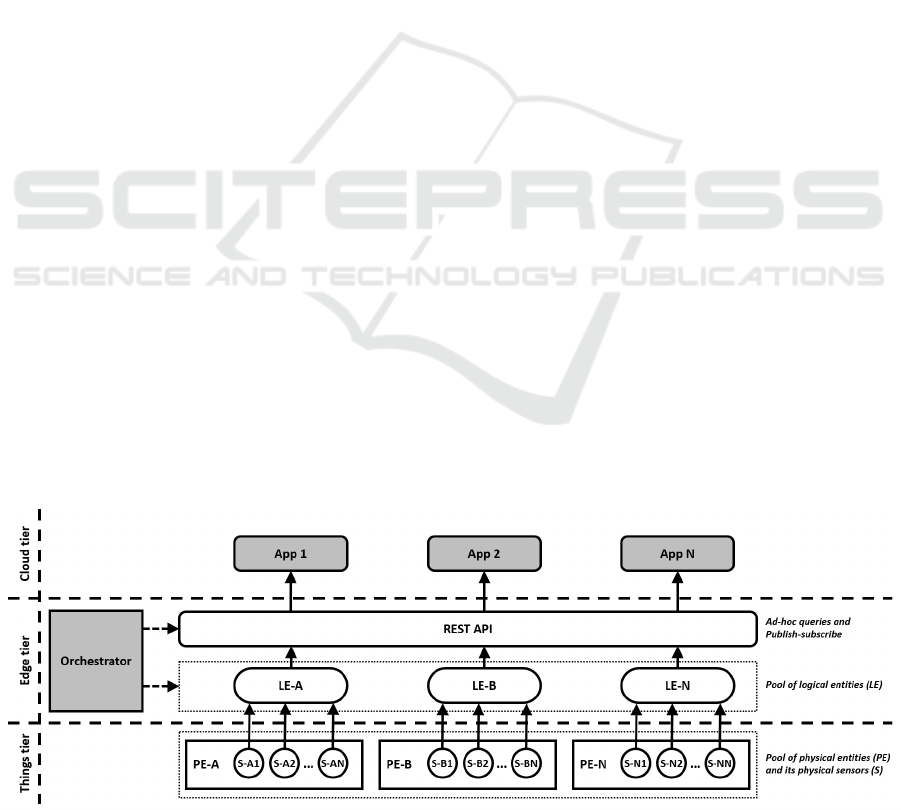
Considering such an organization for IoT systems
and the model for DSPS described in (Isah et al.,
2019), in this work we propose a DSP framework (de-
picted in Fig. 1) to be deployed at the things and edge
tiers. Its goal is to provide real-time and energy-aware
data processing for IoT streamed data. In the figure,
each physical entity (PE) denotes a physical quan-
tity monitored by a group of physical sensing units
(sensors - S) at the things tier. The Orchestrator is
a software component placed at the edge tier. It in-
Figure 1: Schematic view of the proposed framework for real-time and energy-aware data stream processing.
IoTBDS 2021 - 6th International Conference on Internet of Things, Big Data and Security
20
stantiates logical representations of each physical en-
tity, called logical entities (LE), and also provides a
Representational State Transfer Application Program
Interface (REST API) (Richards, 2006) to allow com-
munication between LEs and applications. The sensor
nodes at the Things tier push readings to LEs via Con-
strained Application Protocol (CoAP) (Shelby et al.,
2014). Applications running at the cloud tier, or even
at the edge tier, consume data from LEs via Hyper-
text Transfer Protocol (HTTP) (Fielding and Reschke,
2014). The proposed framework supports both syn-
chronous queries and asynchronous patterns such as
publish / subscribe (Eugster et al., 2003).
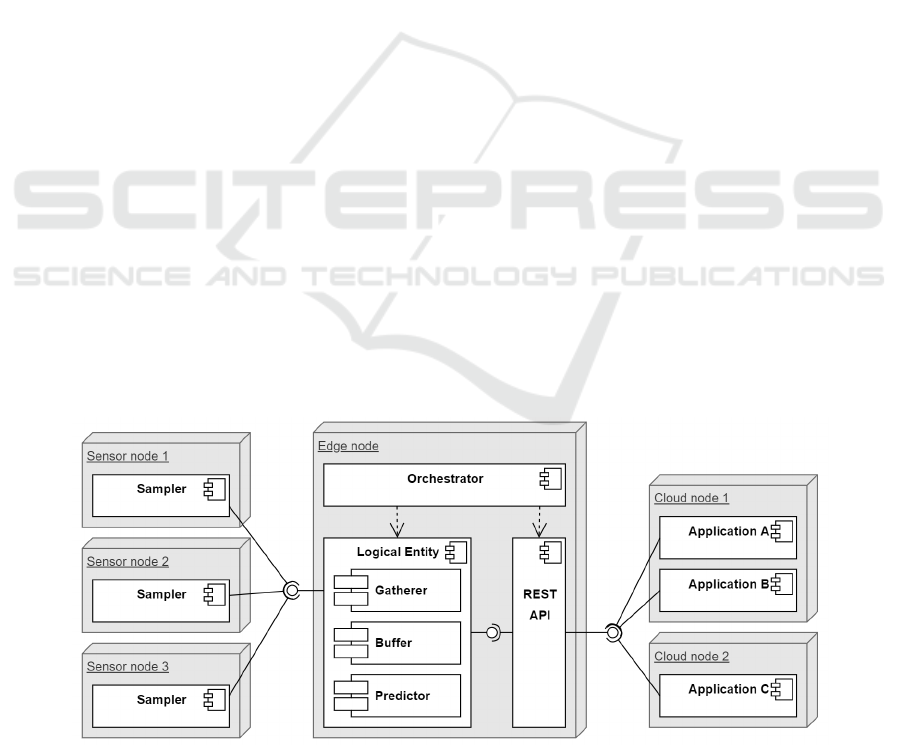
Figures 2 and 3 illustrate a use case of a single
entity monitored by three physical sensors and serv-
ing three different applications. We use a simpli-
fied scenario to allow the graphic representation of
the components and their interactions. The adoption
of decoupled components and the possibility of host-
ing them using lightweight virtualization techniques
(such as containers) make the proposed framework
potentially scalable in terms of physical entities, sen-
sors and applications. The software components that
encompass the proposed framework are described as
follows, along with their correspondence to the layers
for data stream processing systems proposed by (Isah
et al., 2019):
• Sampler: it is a CoAP client that runs on the
sensor nodes and it represents the data ingestion
layer. Its function is to sample the physical entity,
send the data to the correspondent LE and receive
a time interval as a response from the LE. This
time interval is used to put the sensor node in a
sleep state. When the sensor node goes back to
the active state, this process is repeated.
• Orchestrator: it is a service that runs on the edge
node to coordinate instantiating of LEs and the
communication between LEs, sensors and appli-
cations. It represents the resource management
layer.
• Logical Entity (LE): it consists of a set of decou-
pled modules (described below) that run on the
edge node and work together to provide an ab-
stract view of a monitored entity or phenomena:
– Gatherer: a CoAP server that listens to requests
on a specific UDP port. Its function is to re-
ceive data sampled from sensor nodes and re-
spond back with a time interval until the next
sampling. Section 3.2 describes how these time
intervals are calculated.
– Buffer: to meet strict real-time requirements for
processing requests within milliseconds, an in-
memory data store that keeps the data in the
random access memory (RAM) is necessary
(Zhang et al., 2015). This is used to persist sen-
sor readings for a short predefined time. It rep-
resents the persistence layer.
– Predictor: this is a component responsible to
retrieve data from the buffer, identify and dis-
charge incorrect readings and output a calcu-
lated value based on a predefined aggregation
function. It represents the DSP layer. Section
3.3 describes how these operations are carried
out.
• REST API: it is an HTTP endpoint (Richards,
2006) provided by the Orchestrator to standard-
ize the communication between LEs and applica-
tions. It represents the output layer.
Figure 2: Nodes and components involved on a hypothetical scenario of a single entity monitored with three physical sensors
and serving different applications.
A Real-time and Energy-aware Framework for Data Stream Processing in the Internet of Things
21
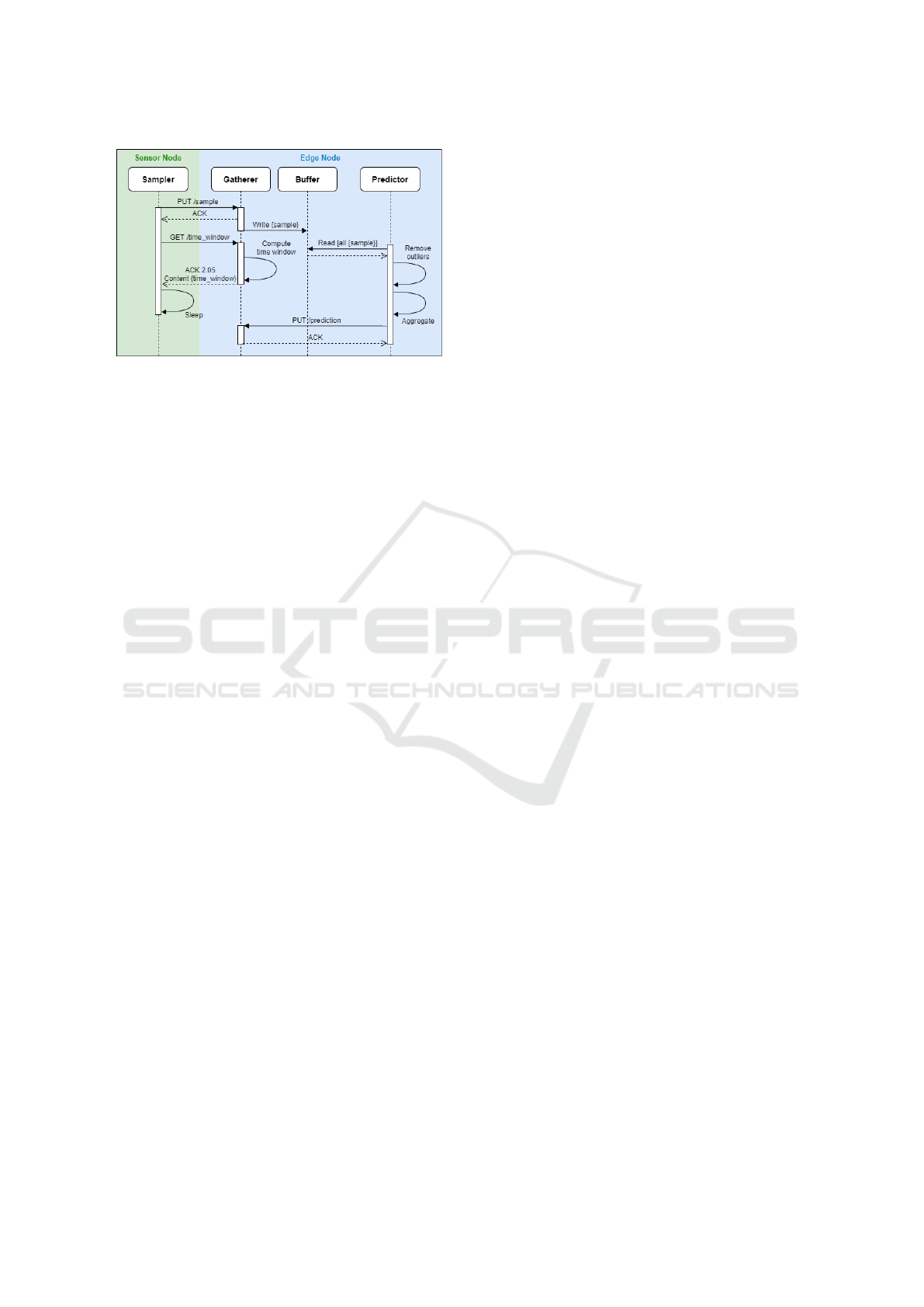
Figure 3: Interactions between software components.
3.2 Adaptive Sampling Strategy
An adaptive sampling strategy consists of dynam-
ically varying the time interval between samplings
somehow to follow the variability of the sampled
physical entity. Whenever there is little or no vari-
ation, the sample interval can be increased. When-
ever there is a significant variation, the sample in-
terval must be reduced. The purpose of an adaptive
sampling method is to reduce as much as possible the
number of samples per unit of time, aiming at reduc-
ing the energy consumption of the sensor node. How-
ever, this strategy needs to be applied carefully so as
not compromising the accuracy of the sampled series
(Anastasi et al., 2009).
When combined with a data prediction model, it is
possible to calculate the difference between the sam-
pled and predicted values. Thus, a domain special-
ist can configure a tolerance threshold which shall
be used to drive the adaptive sampling strategy. A
so-called greedy adaptive sampling strategy increases
the sampling interval at each sampling until the pre-
diction exceeds this tolerance threshold. When the
threshold is exceeded, the sampling interval is re-
duced so that the predicted and sampled values are
closer again. Also, minimum and maximum thresh-
olds can be added to satisfy application requirements
(Monteiro et al., 2017).
The adaptive sampling strategy adopted on the
proposed framework is an adaptation made to the one
described in DPCAS (Monteiro et al., 2017), also pro-
posed by our research group, for data stream process-
ing in WSNs. DPCAS uses the TCP congestion con-
trol algorithm concepts to adjust the sampling inter-
val of each sensor node dynamically. The strategy is
based on the TCP CUBIC protocol (Ha et al., 2008),
where the size of the windows vary according to a cu-
bic function. The equations of the adaptive sampling
method are as follows:
W
i
= C(t − K)
3
+W
max
(1)
K = (βW
max
/C)
1/3
,0 < β ≤ 1 (2)
Where W
i
represents the sample interval calculated at
the i-th sampling, which will be used as the sensor
hibernation time until the next sampling, C is a scale
factor known as a CUBIC parameter (typically 0.4),
t is the elapsed time since the last reduction of the
sample interval, W
max
is the sample interval immedi-
ately before the last reduction of the sample interval
and β a multiplicative reduction factor (typically 0.2).
The factor K, described in Equation 2, is updated only
when an event of reduction of the sample interval oc-
curs. An event of reduction of the sampling interval
occurs whenever the difference (δ) between the sam-
pled value (Y
i
) and its respective prediction (F
i
) ex-
ceeds the tolerance limit of the application (ε), that is,
whenever:
|Y
i
− F
i
| = δ > ε (3)
In addition, the application can also impose a mini-
mum (S
min
) and maximum (S
max
) limit for sampling
interval variation, that is:
S
min
≤ W
i
≤ S
max
(4)
In our proposal, we assume the presence of multiple
sensors sampling the same physical entity, so called
multi-sensed entity scenario. In the adaptive sampling
model proposed by DPCAS, each sensor node acts in
a completely autonomous way. It samples the phys-
ical entity and calculates the time window until the
next sampling based on its own samples. However, as
the cubic function used to compute the time intervals
is the same for all sensor nodes, the sensing rate is
very close or the same for all nodes. Therefore, there
is some synchronization between the sensor node ac-
tivities since the time windows increase and decrease
almost simultaneously. All the sensors would always
be sampling at the very same time. Similarly, all the
sensors would also be in a sleep state at the same
time. This aspect creates a gap that we call a ”blind
window”: if a sudden variation occurs when all sen-
sors are sleeping, this variation will only be identified
when the sensors wake up.
In such a multi-sensed entity scenario, all the sen-
sors monitoring the same entity must not be in a sleep
state simultaneously. This opens up an opportunity
that we explore by proposing a collaborative strategy:
to distribute different sampling intervals between sen-
sor nodes. It aims at desynchronizing sensor nodes
activities to reduce these blind windows and make the
adaptive sampling model more responsive to sudden
changes in the data stream.
To enable this collaborative and desynchronized
approach, the calculations of time intervals between
samplings must be carried out at the edge node and
not at the sensor nodes. The edge is the only node
IoTBDS 2021 - 6th International Conference on Internet of Things, Big Data and Security
22

that communicates with all sensor nodes and it is also
responsible for computing data predictions. Only the
edge node has all the information required to calcu-
late sampling intervals. In this way, the gatherer com-
ponent is responsible for these computations by per-
forming the following steps:
1. It receives a sensor reading from the sampler;
2. It stores the received value in the buffer;
3. It uses the cubic function, the last value computed
by the predictor and the last computed sampling
window to compute the next sampling window;
4. It sends the sampling window back to the Sam-
pler.
3.3 Data Prediction
A prediction model aims at computing future sen-
sor readings. Simple Exponential Smoothing (SES)
(Ha et al., 2008) and Double Exponential Smooth-
ing (DES), also known as Holt Method (Hyndman
and Athanasopoulos, 2014) (Wright, 1986) are good
examples of data prediction models. They are com-
putationally economical and thus interesting choices
for WSNs and IoT (Monteiro et al., 2017). However,
both were designed to predict readings of an individ-
ual sensor based on its own past readings. As already
mentioned in section 3.2, our framework assumes a
multi-sensed entity scenario. Thus, our data predic-
tion model must consider readings from different sen-
sors, physically closer to each other, on its computa-
tions. From a high level perspective, the data pre-
diction model performed by our Predictor component
consists of (i) cleaning noisy/incorrect readings and
(ii) computing an output value based on an aggrega-
tion function.
Data streams are continuous flows of isolated data
points. In an IoT use case with sensor generated data,
these data points are represented by sensor readings.
Sensors are fail-prone devices. Incorrect sensor read-
ings need to be identified and discarded as best as pos-
sible to improve the quality of the information and
decisions based on the acquired data. No data point
can be considered an outlier on an individual basis
analysis. Thus, defining a way to group and analyze
these data points together is a major concern when de-
signing an outlier detection task for IoT. Buffering in-
coming data on a predefined length or time interval to
create windows is a common approach to group data
points and perform operations on data streams (Tsai
et al., 2014).
Clustering is a problem widely studied in data
mining and AI literature. However, it is difficult to
adapt arbitrary clustering algorithms to the context
of data stream processing. The data stream feature
of being potentially unbounded in size makes such
adaptation especially complex (Aggarwal, 2013). K-
means is one of the best-known clustering and also the
starting point for a number of variations tailored for
stream processing (Tsai et al., 2014). However, since
each outlier can represent a different cluster and the
number of clusters is an expected input for K-means
and its variations, such algorithms are not suitable for
outlier detection. Density-based techniques, in turn,
are able to determine the number of clusters as an out-
put. Thus, they are more effective and versatile than
K-means for the purpose of outlier detection in data
streams in the IoT (Aggarwal, 2013). Even not being
tied to a specific algorithm, our proposed framework
requires a density-based approach to be chosen. A set
of good candidates is presented in (Campello et al.,
2013). We chose Density-based spatial clustering of
applications with noise (DBSCAN) in our implemen-
tation of the predictor component.
Choosing an aggregation function can become a
complex task depending on the application’s use case.
In the same way as for the clustering algorithm used
in the outlier detection task, this is a feature where the
proposed framework gives some autonomy regarding
its choice. In the context of real-time data stream
processing for IoT, it can be assumed that the input
data are sensor readings sampled in a short time win-
dow. We must also consider that these data points
have been cleaned by an outlier detection task and
are trustworthy. Therefore, central tendency statisti-
cal measures, such as mean and median, are reason-
able choices to represent the value measured in that
time interval. For the sake of simplicity, we use the
arithmetic average function in our implementation.
The current version of the Predictor component
adopts a naive approach which can be summarized as
a three-step procedure:
1. It takes all the samples from the buffer as the in-
put;
2. It runs DBSCAN to identify and remove outliers;
3. It computes and outputs the arithmetic average of
the remaining samples.
4 EVALUATION
In this section, we describe the experiments per-
formed with the proposed framework in order to eval-
uate (i) the impact, in terms of accuracy of the output
data, of reducing the number of data samples sent by
the sensors; (ii) how efficient is the proposed adap-
tive sampling strategy in terms of energy consump-
A Real-time and Energy-aware Framework for Data Stream Processing in the Internet of Things
23

tion, and (iii) how fast is the proposed data prediction
model to process buffered data.
4.1 Environment
The components of the framework were developed in
Python 3 language. The CoAP features were imple-
mented with CoAPthon (Tanganelli et al., 2015). Re-
dis (Sanfilippo and Noordhuis, 2009) was used to im-
plement the Buffer component. The REST API was
implemented with Flask (Ronacher, 2020). In terms
of infrastructure, not only the development of the soft-
ware components but also a preliminary proof of con-
cept (PoC) were executed on a Raspberry Pi 3 Model
B+ which is a widely used device in many IoT appli-
cations. We created an isolated virtual network on
a public cloud environment to simulate the experi-
ments on five different input data volumes and allo-
cated computing resources for processing. To opti-
mize the costs incurred by running these experiments
on a public cloud with a pay-as-you-go model, each
sensor node runs 30 instances of the sampler compo-
nent to simulate 30 physical sensors running simul-
taneously. A single edge node gets more allocated
resources since the proposed solution is not yet pre-
pared to run in a distributed manner. Table 1 de-
scribes the number of sensors ingesting data and also
the computing resources of the edge node (vCPUs and
RAM) for each round of simulation. All sensor and
edge nodes are powered by 64-bit Arm-based proces-
sors, with 10 Gbps network bandwidth and Ubuntu
Linux 20.04 operating system. This configuration for
the virtual machines is the closest setup to a Rasp-
berry Pi 3 B+ we can achieve on a public cloud.
A preliminary data set of real sensor readings was
generated from six Adafruit DHT11 sensors (Indus-
tries, 2020) continuously collecting temperature and
humidity data for one hour. Then, we used this data
set to generate synthetic data sets of 480 sensors by
adding to these measured values a random value rang-
ing from -1 to 1. Finally, the synthetic data set was
used as the input on each round of simulation for two
different sampling modes:
1. Fixed Sampling Mode: the complete synthetic
data set is sent to the edge node according to its
timestamp and used by the predictor component
to compute the output. This scenario represents a
benchmark use case where all the sensors are ac-
tive all the time.
2. Adaptive Sampling Mode: each instance of the
sampler component running on a sensor node
communicates with the edge node to send data
when active and sleeps according to the time win-
dows received. Data points from the synthetic
Table 1: Infrastructure setup per round of simulation.
Round Sensors Edge vCPUs Edge RAM
1 30 1 4 GiB
2 60 2 8 GiB
3 120 4 16 GiB
4 240 8 32 GiB
5 480 16 64 GiB
data set in which the timestamp corresponds to the
sensor’s sleep time are discarded.
In all rounds of simulations, the data prediction task is
executed once every five seconds to get the data used
to generate the line and scatter plots in this section.
Before evaluating the impacts and benefits of the
proposed solution, it is important to clarify the core
difference between the two samplings, which will be
compared in the following subsections. As it is shown
in Fig. 4, while the fixed sampling mode keeps a high
number of samples at the buffer all the time, in the
adaptive sampling mode, this number varies accord-
ing to the value of the data being gathered. When the
temperature and humidity values are stable, the num-
ber of buffered samples is low. When the tempera-
ture and humidity values start to change, the number
of buffered samples increases quickly. This behav-
ior is observed in all simulation rounds with different
scales. As the data volume being gathered increases
on each simulation round, the difference in the num-
ber of buffered samples over time is even greater. Fig.
4 also presents the difference between rounds 1 and 5.
4.2 Data Accuracy
The reduced number of samples sent to the edge
node using the adaptive sampling mode implies that
less data is available for the data prediction model.
Figure 4: Buffered load over time by sampling strategy.
IoTBDS 2021 - 6th International Conference on Internet of Things, Big Data and Security
24
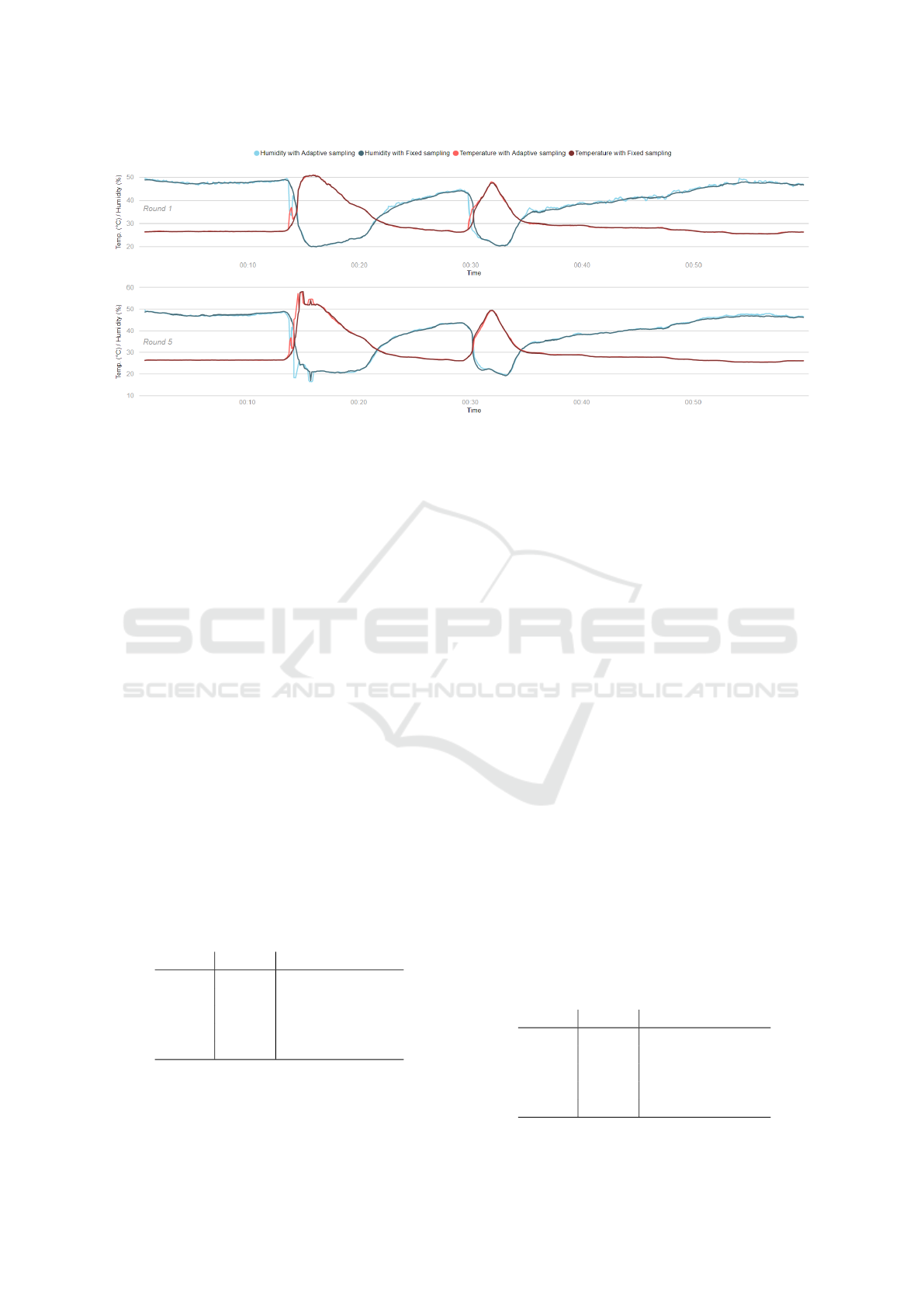
Figure 5: Temperature and humidity readings processed with different sampling strategies.
Thus, there is a concern that data accuracy might be
affected. To evaluate how this reduced amount of
data available impacts the data prediction output, we
use Mean Absolute Error (MAE) metric (Chai and
Draxler, 2014). We assume the outputs from the exe-
cutions using fixed sampling as the real/observed val-
ues to calculate the differences from the outputs ob-
tained with adaptive sampling mode on each simu-
lation round. Tables 2 and 3 present the calculated
MAE and data range per round of simulation for hu-
midity and temperature. It is possible to say that scal-
ing up sensors and computing resources does not im-
pact MAE.
Despite the considerable difference in the data
available at the buffer, both fixed and adaptive sam-
pling modes have a very similar data prediction out-
put. Fig. 5 allows visualizing how close are the out-
puts for both sampling modes. The red lines repre-
sent temperature readings while the blue lines repre-
sent humidity readings. The darker lines correspond
to the fixed sampling mode while the lighter ones cor-
respond to the adaptive sampling mode. By compar-
ing rounds 1 and 5, it is also possible to note that the
greater the amount of data, the closer are the outputs
for the different sampling approaches.
Table 2: MAE for humidity per round of simulation.
Round MAE Range
1 0.5365 (19.91 - 51.01 %)
2 0.5720 (17.15 - 50.44 %)
3 0.4110 (16.84 - 52.23 %)
4 0.3656 (19.06 - 51.23 %)
5 0.4738 (16.45 - 50.46 %)
4.3 Energy Consumption
Once it is proved that the reduced number of samples
does not significantly affect the accuracy of the out-
put data, we need to verify the benefit of the adaptive
sampling strategy in terms of energy consumption. To
verify how efficient the proposed framework is on re-
ducing the energy consumption of the sensor nodes
when compared to a traditional fixed sampling ap-
proach, we use PowerPi (Kaup et al., 2014). PowerPi
is a power consumption model to calculate the energy
consumed by an application running on a Raspberry
Pi device (RPi).
To calculate the energy consumption of an appli-
cation with PowerPi, only the application to be mea-
sured must be running on the device, along with es-
sential operating system tasks. Our experiments rely
on 30 concurrent processes running the sampler com-
ponent on a shared virtual sensor node (section 4.1).
To allow this calculation, we had to make an assump-
tion: the energy consumption was measured individ-
ually on a real Raspberry Pi 3 Model B+ device for
each of the four main actions performed by a sensor
node (described below). The total energy consump-
tion of a sensor node is computed as a weighted sum
of each of these individual measures plus a constant
value for idle time (Kaup et al., 2014). The weights
are based on the application logs, where every ac-
Table 3: MAE for temperature per round of simulation.
Round MAE Range
1 0.1894 (25.44 - 51.01 °C)
2 0.2517 (25.46 - 57.53 °C)
3 0.3369 (25.59 - 50.65 °C)
4 0.2609 (25.31 - 58.59 °C)
5 0.2384 (25.40 - 58.09 °C)
A Real-time and Energy-aware Framework for Data Stream Processing in the Internet of Things
25
tion of the sensor node is registered. The four actions
performed by a sensor node which were individually
measured are:
1. Sampling: sampling the physical entity to obtain
the temperature and humidity values.
2. Sending: sending sampled data to the edge node.
3. Getting Window: getting the sleep time until the
next sampling from the edge node.
4. Sleeping: sensor inactive for 1s.
The assumption made can lead to calculated values
that might not accurately represent the real energy
consumption of the devices. However, for a strictly
comparative analysis between the scenarios, the per-
formed calculations are enough. Fig. 6 shows that
the adaptive sampling strategy leads to average energy
consumption savings ranging from 42.93% to 60.58%
on sensor nodes, which is a very significant result. It
is also possible to state, from the same Fig. 6, that
actions that involve communication between the sen-
sor and edge nodes (specially ”Sending”) are the most
expensive in terms of energy consumption. The adap-
tive sampling strategy essentially replaces ”Sending”
activity by less expansive actions: ”Sleeping”, which
is the least expensive activity and ”Getting” which is
also a communication activity but with much smaller
payloads.
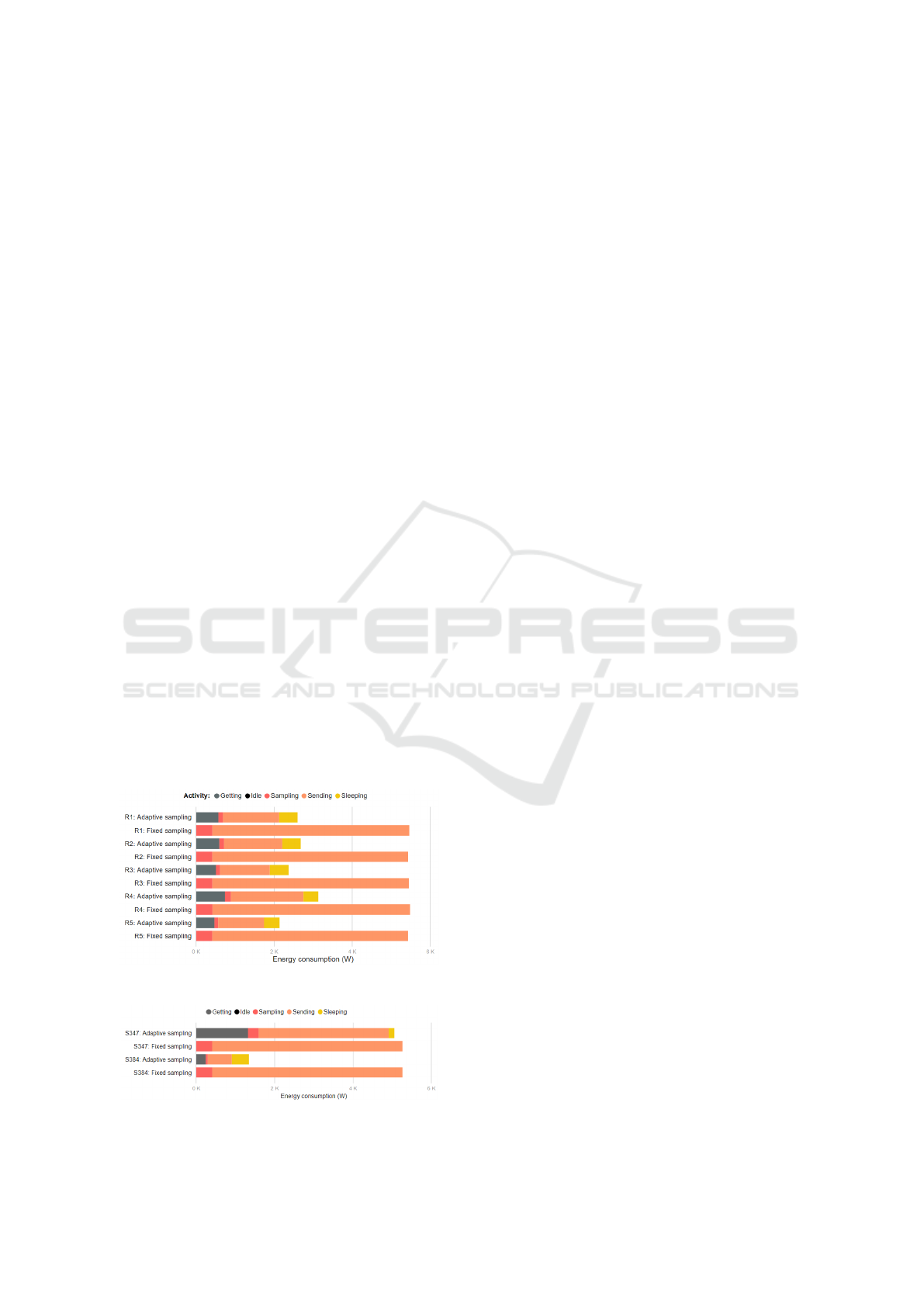
The carried out experiments also allowed observ-
ing an expected side effect of the proposed adaptive
sampling strategy: poor load balancing. Although the
total energy consumption of the sensor nodes is sig-
nificantly reduced in the broad spectrum compared to
the fixed sampling strategy, individually, some sen-
sors presented a much higher energy consumption
Figure 6: Average energy consumption per sensor node.
Figure 7: Energy consumption of sensors 347 and 384.
than others in the same group. Load balancing tends
to get worse as we increase the number of sensors. Fig
7 shows the high contrast between the energy savings
of two sensors on the same group in simulation round
5. For smaller scales (rounds 1 to 3), this anomaly is
tiny, almost irrelevant.
4.4 Real-time Data Prediction
Earlier research on computer response times suggests
that(Nah, 2004):
• 0.1s: is the limit for having the users feel that the
system is reacting instantaneously, meaning that
no special feedback is necessary except to display
the result;
• 1.0s: is about the limit for the user’s flow of
thought to stay uninterrupted, even though the
user will notice the delay. Normally, no special
feedback is necessary during delays of more than
0.1s but less than 1.0s;
• 2.0s: is the limit where a response to simple com-
mands becomes unacceptable to users.
According to the definitions above, to meet the real-
time requirement, we consider 1.0 s as a threshold for
the data prediction task’s execution time. To achieve
such goal on this multi-sensed environment, it is re-
quired to choose fast and non compute intensive algo-
rithms when implementing the Predictor component
to run on an edge device. DBSCAN was chosen for
data cleaning/pre-processing due to its good capabil-
ity of finding arbitrarily shaped clusters, what makes
it robust to outlier detection (Campello et al., 2013).
The performed experiments involve continuous vari-
ables, which are real values over a non-empty range.
Thus, we believe that a simple average can fairly rep-
resent the temperature and humidity values given a
set of samples over a given short time. Therefore, the
Mean statistical function was chosen as the aggrega-
tion function for this implementation.
The time elapsed in each data prediction execution
was also registered as an attribute on the output data.
This information evaluated how fast the data is being
processed, considering the data cleaning and aggre-
gation tasks. Fig 8 shows how the execution time of
the data prediction increases as the volume of data
processed (number of buffered samples) grows. The
graph presents a linear progression, suggesting good
scalability of the proposed solution using the chosen
algorithms. There were actually a very small number
of data points (9) above the threshold (1.0 s), repre-
senting less than 0.3% of the total and, therefore, can
be considered outliers. These outliers are outside the
plotting area to provide a better view of the relevant
IoTBDS 2021 - 6th International Conference on Internet of Things, Big Data and Security
26

Figure 8: Data prediction execution time per amount of
buffered samples.
part of the data. It is important to highlight that even
with a number of samples in the order of 7 thousand
units, the processing time remains below 0.6 s.
5 FINAL REMARKS
This work presented a real-time and energy-aware
data stream processing framework for IoT. Experi-
ments show that the reduced number of samples does
not compromise data accuracy due to a combination
of an adaptive sampling strategy with a data predic-
tion model. Being energy efficient, the framework has
reduced the average energy consumption of sensor
nodes up to 60.58%. The results described in 4.4 indi-
cate that the edge data prediction model successfully
addresses real-time requirements by meeting the exe-
cution time threshold of 1s for the data prediction ac-
tivity. The main contribution of the proposed frame-
work is its capability of tackling real-time processing,
energy consumption and data accuracy requirements
all together. Thus, it might be used to enable the de-
velopment of long running real-time data stream pro-
cessing IoT systems in remote outdoor environments,
where energy sources are scarce and it undesirable or
unfeasible replacing batteries frequently.
ACKNOWLEDGEMENTS
This work has been partially funded by Fundac¸
˜
ao
de Amparo
`
a Pesquisa do Estado de S
˜
ao Paulo -
FAPESP (grant 2015/24144-7), Fundac¸
˜
ao de Am-
paro
`
a Pesquisa do Estado do Rio de Janeiro -
FAPERJ (grant 2017/233868) and Conselho Nacional
de Desenvolvimento Cient
´
ıfico e Tecnol
´
ogico - CNPq
(grant 434874/2018-3). Marta Mattoso and Flavia
Delicato are CNPq Fellows.
REFERENCES
Aggarwal, C. C. (2013). Mining Sensor Data Streams. In
Managing and Mining Sensor Data, pages 143–171.
Springer US, Boston, MA.
Akyildiz, I., Su, W., Sankarasubramaniam, Y., and Cayirci,
E. (2002). Wireless sensor networks: a survey. Com-
puter Networks, 38(4).
Al-Hoqani, N. and Yang, S.-H. (2015). Adaptive sam-
pling for wireless household water consumption
monitoring. Procedia Engineering, 119:1356 –
1365. Computing and Control for the Water Industry
(CCWI2015) Sharing the best practice in water man-
agement.
Anastasi, G., Conti, M., Francesco], M. D., and Passarella,
A. (2009). Energy conservation in wireless sensor net-
works: A survey. Ad Hoc Networks, 7(3):537 – 568.
Atzori, L., Iera, A., and Morabito, G. (2010). The In-
ternet of Things: A survey. Computer Networks,
54(15):2787–2805.
Campello, R. J. G. B., Moulavi, D., and Sander, J. (2013).
Density-based clustering based on hierarchical den-
sity estimates. In Pei, J., Tseng, V. S., Cao, L., Mo-
toda, H., and Xu, G., editors, Advances in Knowledge
Discovery and Data Mining, pages 160–172, Berlin,
Heidelberg. Springer Berlin Heidelberg.
Catarinucci, L., de Donno, D., Mainetti, L., Palano, L., Pa-
trono, L., Stefanizzi, M. L., and Tarricone, L. (2015).
An iot-aware architecture for smart healthcare sys-
tems. IEEE Internet of Things Journal, 2(6):515–526.
Chai, T. and Draxler, R. R. (2014). Root mean square error
(rmse) or mean absolute error (mae)? Geoscientific
Model Development Discussions, 7(1):1525–1534.
Dautov, R., Distefano, S., Bruneo, D., Longo, F., Merlino,
G., and Puliafito, A. (2018). Pushing intelligence to
the edge with a stream processing architecture. In Pro-
ceedings - 2017 IEEE International Conference on In-
ternet of Things, IEEE Green Computing and Commu-
nications, IEEE Cyber, Physical and Social Comput-
ing, IEEE Smart Data, iThings-GreenCom-CPSCom-
SmartData 2017.
Dias de Assunc¸
˜
ao, M., da Silva Veith, A., and Buyya, R.
(2018). Distributed data stream processing and edge
computing: A survey on resource elasticity and future
directions. Journal of Network and Computer Appli-
cations.
Eugster, P. T., Felber, P. A., Guerraoui, R., and Kermarrec,
A.-M. (2003). The many faces of publish/subscribe.
ACM Comput. Surv., 35(2):114–131.
Fielding, R. T. and Reschke, J. (2014). Hypertext Transfer
Protocol (HTTP/1.1): Semantics and Content. RFC
7231.
Gupta, M., Shum, L. V., Bodanese, E., and Hailes, S.
(2011). Design and evaluation of an adaptive sampling
strategy for a wireless air pollution sensor network. In
2011 IEEE 36th Conference on Local Computer Net-
works, pages 1003–1010.
Ha, S., Rhee, I., and Xu, L. (2008). Cubic: A new tcp-
friendly high-speed tcp variant. SIGOPS Oper. Syst.
Rev., 42(5):64–74.
A Real-time and Energy-aware Framework for Data Stream Processing in the Internet of Things
27

Hyndman, R. and Athanasopoulos, G. (2014). Forecasting:
principles and practice. OTexts.
Industries, A. (2020). DHT11 basic temperature-humidity
sensor.
Isah, H., Abughofa, T., Mahfuz, S., Ajerla, D., Zulker-
nine, F., and Khan, S. (2019). A survey of distributed
data stream processing frameworks. IEEE Access,
7:154300–154316.
Janjua, Z. H., Vecchio, M., Antonini, M., and Antonelli,
F. (2019). IRESE: An intelligent rare-event detec-
tion system using unsupervised learning on the IoT
edge. Engineering Applications of Artificial Intelli-
gence, 84:41–50.
Karkouch, A., Mousannif, H., Al Moatassime, H., and
Noel, T. (2016). Data quality in internet of things:
A state-of-the-art survey.
Kaup, F., Gottschling, P., and Hausheer, D. (2014). Pow-
erpi: Measuring and modeling the power consumption
of the raspberry pi. In 39th Annual IEEE Conference
on Local Computer Networks, pages 236–243.
Klein, A. and Lehner, W. (2010). Quality and Performance
Optimization of Sensor Data Stream Processing. In-
ternational Journal on Advances in Networks and Ser-
vices.
Li, S., Xu, L. D., and Zhao, S. (2015). The internet
of things: a survey. Information Systems Frontiers,
17(2):243–259.
Li, W., Santos, I., Delicato, F. C., Pires, P. F., Pirmez, L.,
Wei, W., Song, H., Zomaya, A., and Khan, S. (2017).
System modelling and performance evaluation of a
three-tier Cloud of Things. Future Generation Com-
puter Systems.
Loria, M. P., Toja, M., Carchiolo, V., and Malgeri, M.
(2017). An efficient real-time architecture for col-
lecting iot data. In 2017 Federated Conference on
Computer Science and Information Systems (FedC-
SIS), pages 1157–1166.
Mehmood, E. and Anees, T. (2020). Challenges and so-
lutions for processing real-time big data stream: A
systematic literature review. IEEE Access, 8:119123–
119143.
Monteiro, L. C., Delicato, F. C., Pirmez, L., Pires, P. F., and
Miceli, C. (2017). Dpcas: Data prediction with cu-
bic adaptive sampling for wireless sensor networks.
In Au, M. H. A., Castiglione, A., Choo, K.-K. R.,
Palmieri, F., and Li, K.-C., editors, Green, Perva-
sive, and Cloud Computing, pages 353–368, Cham.
Springer International Publishing.
Nah, F. F.-H. (2004). A study on tolerable waiting time:
how long are web users willing to wait? Behaviour &
Information Technology, 23(3):153–163.
Qin, Y., Sheng, Q. Z., Falkner, N. J., Dustdar, S., Wang, H.,
and Vasilakos, A. V. (2016). When things matter: A
survey on data-centric internet of things. Journal of
Network and Computer Applications, 64.
Richards, R. (2006). Representational State Transfer
(REST), pages 633–672. Apress, Berkeley, CA.
Ronacher, A. (2010 (accessed August 5, 2020)). Flask web
development, one drop at a time.
Samizadeh Nikoui, T., Rahmani, A. M., Balador, A., and
Haj Seyyed Javadi, H. (2021). Internet of things archi-
tecture challenges: A systematic review. International
Journal of Communication Systems, 34(4):e4678.
e4678 IJCS-19-1067.R1.
Sanfilippo, S. and Noordhuis, P. (2009). Redis.
Shelby, Z., Hartke, K., and Bormann, C. (2014). The Con-
strained Application Protocol (CoAP). RFC 7252.
Tanganelli, G., Vallati, C., and Mingozzi, E. (2015).
Coapthon: Easy development of coap-based iot appli-
cations with python. In 2015 IEEE 2nd World Forum
on Internet of Things (WF-IoT), pages 63–68.
Tsai, C.-W., Lai, C.-F., Chiang, M.-C., and Yang, L. T.
(2014). Data Mining for Internet of Things: A Sur-
vey. IEEE Communications Surveys & Tutorials,
16(1):77–97.
Vu
ˇ
cini
´
c, M., Tourancheau, B., Rousseau, F., Duda, A., Da-
mon, L., and Guizzetti, R. (2014). Oscar: Object se-
curity architecture for the internet of things. In Pro-
ceeding of IEEE International Symposium on a World
of Wireless, Mobile and Multimedia Networks 2014,
pages 1–10.
Wright, D. J. (1986). Forecasting data published at irregu-
lar time intervals using an extension of holt’s method.
Management Science, 32(4):499–510.
Xu, Y. and Helal, A. (2016). Scalable cloud–sensor archi-
tecture for the internet of things. IEEE Internet of
Things Journal, 3(3):285–298.
Zhang, H., Chen, G., Ooi, B. C., Tan, K., and Zhang, M.
(2015). In-memory big data management and process-
ing: A survey. IEEE Transactions on Knowledge and
Data Engineering, 27(7):1920–1948.
IoTBDS 2021 - 6th International Conference on Internet of Things, Big Data and Security
28
