
Performance Benchmarking of YOLO Architectures for Vehicle License
Plate Detection from Real-time Videos Captured by a Mobile Robot
Amir Ismail
1,2
, Maroua Mehri
1
, Anis Sahbani
2
and Najoua Essoukri Ben Amara
1
1
Universit
´
e de Sousse, Ecole Nationale d’Ing
´
enieurs de Sousse,
LATIS-Laboratory of Advanced Technology and Intelligent Systems, 4023, Sousse, Tunisia
2
Enova Robotics, Novation City, Technop
ˆ
ole de Sousse, 4000, Sousse, Tunisia
Keywords:
Vehicle License Plate, Detection, Real-time, Video, Mobile Robot, Deep Neural Networks, YOLO
Architectures.
Abstract:
In this paper, we address the issue of vehicle license plate (LP) detection for a mobile robotic application.
Specifically, we tackle the dynamic scenario of a robot in the physical world interacting based on its cameras.
The robot is dedicated essentially to patrol and secure unconstrained environments. Counter to the most recent
works of LP detection which assume controlled deploying scenario, the mobile platform requires a more robust
system that is suitable for various complex scenarios. To contribute to this purpose, we propose an end-to-
end detection module capable of localizing LP either in images or in live-streaming videos. The proposed
system is based on deep learning based detectors, particularly the most recent YOLOv4-tiny one. To evaluate
the proposed system, we introduce the first-ever public Tunisian dataset, called PGTLP, for LP detection that
contains 3,000 annotated images. This dataset was gathered using the security robot during its patrolling and
surveillance of parking stations and high-risk areas. For the detection, a comparative study for the different
YOLO variants has been carried out in order to select the best detector. Our experiments are performed on
the PGTLP images and following the same experimental protocol. Among the selected models, YOLOv4-tiny
reveals the best compromise between detection performance and complexity. Further experiments that have
been conducted using the AOLP benchmark dataset point out that the proposed system has satisfying results.
1 INTRODUCTION
A long-standing target in the field of license plate
detection and recognition (LPDR) is to develop sys-
tems that can perceive and understand a rich and
huge variety of configurations of license plates (LP).
Significant strides have been made towards this goal
over the last few years benefiting from the parallel
progress in computing, data availability and partic-
ularly deep learning architectures. Meanwhile, con-
ventional computer vision techniques become more
and more limited, and no longer reliable in terms
of their ability to follow the requirements of real-
time scenario applications. Therefore, most of the
state-of-the-art works in LPDR have been focusing
on exploring what is happening in a very fast growing
field, called representation learning, more commonly
known as deep learning. Hence, the progress has been
rapid in this context, especially when the algorithms
that were designed for visual recognition got really
useful for LPDR.
Given this, the identification of vehicles through
their LP has been empowering many aspects of the
modern civilization from intelligent transportation
(e.g. traffic flow monitoring, congestion estimation
and management) to surveillance systems (e.g. ve-
hicle identification and tracking, police interference)
to car park management (e.g. automatic number plate
recognition ticking, data insights, vehicle access). Ev-
idently, these extremely delicate applications require
first and foremost a tricky trade-off between preci-
sion and operating time. Furthermore, a robust solu-
tion is highly required in this context considering the
large number of challenges. First up, the LP template
has been considered as the foreground issue since it
varies not only domestically, but as well across coun-
tries. This includes character component specifica-
tions from size to color to texture along with its back-
ground. Also, it is pointed out that the single- and
double-lined LP keeps to be a major bottleneck situ-
ation. Second, when it comes to deployment, LPDR
is definitely an outdoor scenario. Hence it requires
Ismail, A., Mehri, M., Sahbani, A. and Ben Amara, N.
Performance Benchmarking of YOLO Architectures for Vehicle License Plate Detection from Real-time Videos Captured by a Mobile Robot.
DOI: 10.5220/0010349106610668
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
661-668
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
661

to be situation-independent in terms of camera angle,
camera motion and vehicle speed.
As regards to the above-mentioned requirements,
countless attempts keep maintaining a tremendous ef-
fort to get over the gap and deliver a scalable and
robust LPDR system. Although the fascinating up-
to-date outcomes, the existing solutions can oper-
ate only with respect to a predefined ground which
is not always the case. We can mention for exam-
ple the single-template LP, the mono-language LP,
the camera placing (e.g. parking gate, highway, ur-
ban road). Few recent contributions have suggested
deep learning-based frameworks to completely re-
move some of these dependencies (Henry et al., 2020)
(Kessentini et al., 2019). However, their methods are
either designed to operate on one LP per frame or are
tested on a single-camera scenario.
The context of our work covers the partner-
ship with our industrial collaborator named “Enova
Robotics”, a company whose business is in manufac-
turing that manufactures mobile robots. It responds
to our partner’s need in order to satisfy his multi-
camera scenarios. In fact, “Pearl Guard”
1
, “Enova
Robotics”’s main product, is autonomously driving
security mobile platform. It patrols high-security ar-
eas such as airport runways and parking lots. It is with
respect to these conditions that we will introduce a
novel and realistic licence plate detection (LPD) sys-
tem to be implemented on the robot.
The main outcomes of this work are summarized
as listed below:
1. We present a comparative study of the state-of-
the-art object detection models, namely YOLO
and its derivatives in the context of LP detection
since many recent works rely on the YOLO exten-
sions.
2. We propose an end-to-end Tunisian LP detection
module that works on multi-templates without the
need of any pre-processing functionalities. The
infrastructure of the module is based on the state-
of-the-art YOLOv4-tiny object detection model.
The module remains robust to all the challenges
such as multi-LP context, various templates and
unusual backgrounds.
3. To the best of our knowledge, we present the first
publicly-accessible Tunisian vehicle LP dataset
so-called the PGTLP dataset containing up to
3,000 multi-norm LP annotated images. This
dataset, collected using the security robot, covers
the major difficulty levels of LP detection in un-
constrained environments.
1
https://enovarobotics.eu/pguard/
4. We evaluate the proposed module on the AOLP
benchmark dataset (Hsu et al., 2012). The
achieved module is capable of running on a multi-
terrain robot with real-time performance.
The remainder of this paper is structured as fol-
lows. Section 2 reviews the main recent deep archi-
tectures proposed in the literature for LP detection.
Section 3 presents brief descriptions of the different
YOLO architectures evaluated in this paper. In Sec-
tion 4, we detail the experiments carried out to com-
pare the different YOLO architectures by outlining
the experimental corpus, the experimental protocol,
and the different computed performance evaluation
metrics. Section 5 analyzes the obtained qualitative
and quantitative results along with the computational
cost. Finally, our conclusions and further work are
given in Section 6.
2 RELATED WORK
The existing LPDR related contributions can be seen
as two main well-separated branches. Firstly, we de-
tect the LP, and then we recognize its components in
order to identify the vehicle. Since the recognition
module is out of the scope of this work, we will only
dig in from the detection part direction and we will go
mostly through deep learning-based contributions.
There is a large number of related works and inspi-
ration in the field of LP detection. In a first time, a lot
of focus is on traditional computer vision techniques.
Hsu et al. (Hsu et al., 2012) used the edge cluster-
ing approach to detect Taiwan LP. Kteta et al. (Ktata
et al., 2015) introduced a so-called extraction module
composed of horizontal and vertical edge processing
together with conventional pre-processing functions
such as dilatation and filtering to detect Tunisian LP.
Since the jump up of deep models, old-fashion
computer vision methods are no longer reliable in
terms of pattern recognition compared to the new
competitive deep learning-based approaches. For in-
stance, Li and Shen (Li and Shen, 2016) extracted
candidate LP using a two 4-layer convolutional neural
networks (CNN). The first CNN was used in a sliding
window fashion to find the LP regions, while the sec-
ond one was applied to classify them into plate/non-
plate regions. Selmi et al. (Selmi et al., 2017) put for-
ward a complex detection system that started with few
pre-processing steps and ended with a CNN classi-
fier to distinguish LP regions from non-LP ones. Bu-
lan et al. (Bulan et al., 2017) localized the American
LP using a CNN inspired by the AlexNet architecture
(Krizhevsky et al., 2012) and a linear support vector
machine (SVM) (Cortes and Vapnik, 1995) on top of
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
662

the extracted features. Silva et al. (Silva and Jung,
2017) proposed an end-to-end fast you only look once
(YOLO) based network named FV/LPD-NET to per-
form LP detection from car frontal-views. Hsu et al.
(Hsu et al., 2017) customized two versions of one-
stage detector which are YOLO (Redmon et al., 2016)
and YOLOv2 (Redmon and Farhadi, 2017) to be able
to handle LP detection under, as they have called it,
in-the-wild conditions. Rafique et al. (Rafique et al.,
2018) came with the idea of applying region con-
volutional neural network (RCNN) (Girshick et al.,
2014) and its derivatives such as fast RCNN (Gir-
shick, 2015) and faster RCNN (Ren et al., 2015) using
two different CNN configurations, such as ZF (Zeiler
and Fergus, 2014) and VGG16 (Simonyan and Zis-
serman, 2014). Xie et al. (Xie et al., 2018) ad-
dressed the task of localizing multi-directional LP in
Taiwanese cars. They took into consideration the ro-
tation angle of the LP and included it as a fifth pa-
rameter of the bounding box into a YOLO-based de-
tector. Li et al. (Li et al., 2018) attempted to localize
the LP using a unified deep neural network (DNN).
Their model extracted convolutional features, gener-
ated proposal bounding boxes followed by integrating
and pooling operations to output regions features that
were used by fully connected (FC) layers to regress
the LP class score and the bounding boxes offsets.
Weidog et al. (Min et al., 2019) introduced a frame-
work composed of K-means++ clustering algorithm
(Arthur and Vassilvitskii, 2006) and YOLO-L detec-
tor. Initially, the clustering algorithm selected candi-
date boxes and forwarded them to the YOLO-L. The
detector was a modified version of the YOLOv2 (Red-
mon and Farhadi, 2017) that took care of the detection
step. Meng et al. (Meng et al., 2018) designed a CNN
model named LocateNet to regress the four vertices of
the LP bounding box. Safie et al. (Safie et al., 2019)
proposed a detection system for a surveillance cam-
era installed at a fixed position. They combined Reti-
naNet (Lin et al., 2017) and residual networks (He
et al., 2015) to detect the car plaque numbers.
Recently, Kessentini et al. (Kessentini et al., 2019)
designed a two-stage DNN in the sake of detect-
ing multi-norm and multilingual LP. The first stage
was dedicated to extract LP regions from natural
scene images based on YOLOv2 detector (Redmon
and Farhadi, 2017). In their scenario, they considered
only one vehicle instance per image. More recently,
Selmi et al. (Selmi et al., 2020) put available a deep
learning-based setting to find LP in images. It was de-
veloped on top of the two-stage mask R-CNN object
detector (He et al., 2017). Inspired by the GoogLeNet
architecture (Szegedy et al., 2014), they proposed a
stylish feature extractor. After the generation of pro-
posals, a Softmax classifier was trained to differenti-
ate LP from non-LP. To tackle the issue of various LP
templates, Henry et al. (Henry et al., 2020) presented
an end-to-end LPDR system. For LPD, they modi-
fied a tiny version of YOLOv3 (Redmon and Farhadi,
2018) to make their system responds to real-time re-
quirements. After applying pre-processing and en-
hancement tools, Omar et al. (Omar et al., 2020)
used the SegNet (Kendall et al., 2015) architecture to
segment three regions of Iraqian LP for further pro-
cessing. Pustokhina et al. (Pustokhina et al., 2020)
proposed a full-path technique for LPDR which is
mainly applicable with its first stage to find LP us-
ing improved Bernsen algorithm (IBA) (Latha and
Chakravarthy, 2012) and connected component anal-
ysis (CCA).
3 YOLO ARCHITECTURES
The majority of computer vision applications are
based on using YOLO detectors due to its fast infer-
ence. Since we prioritize the real-time performance
to meet the needs of the mobile robot, our main focus
is to investigate the YOLO detector category. From
the early YOLOv2 to the most recent YOLOv4, YOLO
derivates keep revealing great compromise between
accuracy and runtime speed. Given this, we propose
to bring to the table six versions of YOLO and explore
their performances in the context of LP detection. The
ultimate goal of YOLO is to close the gap of runtimes
in working implementations. The fundamental idea
about YOLO is that they are one-stage detectors and
thereby they treat the detection as a straight regression
problem. In fact, YOLO detector is made up of three
well-independent parts.
• Backbone: is the network responsible for features
formation. Trained on ImageNet classification, it
learns relevant features that will be tweaked in the
new task of detection.
• Neck: mixes and combines the features which are
formed in the CNN backbone in order to capture
both spatial and semantic information and feed
them to the detection step.
• Head: detects multiple-size objects in an anchor-
based fashion by using three different scales of the
network.
Broadly speaking, YOLO descendants respect the
same scheme. Indeed, they access the whole image
and split it into an S × S grid. Instead of predicting
arbitrary boxes, they predict offsets to a bunch of pre-
selected boxes more known as anchors presented in
Performance Benchmarking of YOLO Architectures for Vehicle License Plate Detection from Real-time Videos Captured by a Mobile Robot
663

Table 1. YOLOv2 happens to use mutli-scale train-
ing by removing fully connected layers which makes
it able to accept images of different sizes. Later on,
YOLOv3 comes essentially with feature pyramid net-
work (FPN) approach which allows it to make pre-
dictions at three different scales. A modified ver-
sion of YOLOv3 called YOLOv3-SPP detects objects
with different scales with a slightly different strategy
just by adding a spatial pyramid pooling (SPP) layer.
The SPP block is integrated just after the final fea-
tures map in order to concatenate mutli-scale local
and global features. Just recently, the final version
of YOLO termed YOLOv4 comes out with countless
additional fascinating blocks in particular the path ag-
gregation network (PAN) to be used as a way to prop-
agate information from low layers to the top ones.
The takeaway from this is the modularity of YOLO
in a way small blocks can be arranged and intercon-
nected in various ways so that they jointly process the
data.
In this work, we propose a comparative study of
the six following YOLO variants which are :
• YOLOv2: was a breakthrough in object detection.
It provides a smooth tradeoff between speed and
accuracy.
• YOLOv3, YOLOv3-SPP, YOLOv3-tiny: add nu-
merous connections to the backbone layers and
makes predictions at three separate levels to be
suitable for small object detection. YOLOv3-SPP
is a robust version of YOLOv3 which plugs in
SPP modules in front of the detection headers.
YOLOv3-tiny is a reduced version of YOLOv3,
much faster and less accurate.
• YOLOv4, YOLOv4-tiny: represent the mature
versions of YOLO detectors. Many technolo-
gies have been integrated into YOLOv4 making it
the state-of-the-art detector with a great compro-
mise between accuracy and processing frame rate.
YOLOv4-tiny is a tiny version of YOLOv4 with a
compressed backbone layers. It is 8 times faster
and about 2/3 more efficient.
Table 1 reviews the key components and modules
in the evaluated variants of YOLO detectors and their
performances. In the tables below, the values which
are quoted in red and green colors, are considered as
the lowest and highest, respectively.
Figure 1: Samples from the PGTLP dataset. The resolution
of the images in the left column is 1920 ×1080 pixels, while
in the right column is 800 × 600 pixels.
4 EXPERIMENTS
4.1 Experimental Corpus
We propose to train the deep models on our proper
dataset. To do so, we take advantage of the mo-
bile robot, called “Pearl Guard”, to navigate in dif-
ferent environments while recording vehicles. Dur-
ing the patrolling, the robot “Pearl Guard” supervises
parking slots and high-risk areas. We consider two
scenarios: when the robot is stopped and the vehi-
cle is moving or both of them are in motion. We
have used the cameras of the mobile platform to col-
lect images with different resolutions: 1920 × 1080,
800 × 600 and 640 × 480 pixels (cf. 1). We have tried
to cover the most Tunisian LP templates used for ve-
hicles. Also, the proposed dataset considers the multi-
ple LP per frame situation so that images do not have
only one plate but also two and three instances. Un-
til now, the dataset is composed of 3,000 annotated
images for LP detection. The training and validation
sets contain 2,000 and 500 images, respectively. The
remaining 500 images are for the test phase. All the
models in this paper are trained on the training dataset
and evaluated on the validation dataset. Images are
labeled and annotated with bounding boxes (BB) us-
ing LabelImg tool
2
. LabelImg is a graphical image
annotation tool that supports YOLO annotation for-
mat. The PGTLP dataset is the first and only Tunisian
dataset publicly and freely available for the research
purpose.
4.2 Experimental Protocol
Following the default configurations in Darknet
3
, we
have trained all the versions using stochastic gradient
descent (SGD) algorithm with the momentum of 0.9
except for YOLOv4 where we have used 0.949 and
weight decay of 0.0005. We have set the learning rate
initially to be of 0.001 and it is decayed by a factor of
2
https://github.com/tzutalin/labelImg
3
https://github.com/AlexeyAB/darknet
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
664
Table 1: The characteristics and modules specific to YOLO detectors.
YOLO v2 v3 v3-tiny v3-SPP v4 v4-tiny
Anchors 5 9 6 9 9 6
Backbone VGG-16 Darknet-53 Darknet-19 Darknet-53 CSPDarknet-53 CSPNet-15
FPN 7 D D D D D
SPP 7 7 7 D D D
PAN 7 7 7 7 D D
Head 1 3 2 3 3 2
mAP@.5 (%) 44.0 55.3 33.1 60.6 62.8 40.2
Speed (FPS) 40 66 345 38 55 330
Size (MB) 275 236 33.7 240 245 23.1
10 at the iteration step of 1, 600 and 1,800. We have
selected a maximum number of training iterations
equal to 2, 000 and we have used a batch size of 64.
We have set the size of input image as 416 and 608.
Multi-scale training is enabled by randomly rescaling
on the fly the sizes of input images. The backbone
networks are initialized with the weights pre-trained
on ImageNet
4
. All the experiments were conducted
on Google Colaboratory servers. Table 2 summarizes
the selected hyperparameters for the training of the
models.
Table 2: Selected hyperparameters for the training phase.
Algorithm SGD
Momentum 0.9
Weight decay 0.0005
Learning rate 0.001
Number of iterations 2,000
Batch size 64
Subdivisions 8
Since the LP class does not exist in the ImageNet
classes, we have adapted the original architectures to
perform only LP detection by limiting the number of
classes to only one class. Based on this, we have
changed the number of filters in the convolutional
layer before the YOLO layer (prediction layer) in the
architecture. The number of filters is given by:
N f ilters = (NClasses + 1 + coor) ∗ NbAnchors (1)
where
• NClasses: denotes the total number of objects to
detect;
• NbAnchor: denotes the number of masks for each
layer;
• coor: denotes the four predicted offsets from a
predetermined set of boxes (anchors).
As we intend to detect only one class correspond-
ing to the LP, so the number of filters is fixed to 18.
4
http://www.image-net.org/
YOLO detectors are anchor-based models so
that instead of directly predicting bounding boxes,
they predict offsets from a dataset-specific set of
priors. To identify the dimensions of anchors that
have the best coverage for the training data, we have
run k-means clustering on the dataset then we have
injected them into the architecture of each model
defining a new set of anchors.
5 RESULTS
To analyze the performance of the investigated YOLO
architectures and provide an additional insights into
their numerical complexity, quantitative and qualita-
tive results and computational cost of each YOLO ar-
chitecture are firstly presented. Then, based on the
obtained results many observations and recommen-
dations about the YOLO architecture having the best
trade-off between the best performance and the lowest
computational cost are discussed.
5.1 Quantitative and Qualitative
Results
This section is divided into three parts: the quantita-
tive description of the LP detection results, the quali-
tative results and the comparison with state-of-the-art
LP detection models. In this work, precision (P), re-
call (R), mean average precision (mAP) and intersec-
tion over union (IoU) metrics are computed.
In Table 3, we present the results of the six eval-
uated YOLO models in terms of evaluation metrics.
These results are obtained on the validation dataset
of the PGTLP dataset. Two different input sizes (416
and 608) have been used during the training. As seen
from Table 3, a higher input size of the architecture
clearly increases the inference time while maintain-
ing the other metrics slightly unchangeable. Based on
this, we have decided to select 416×416 as input size
for all the models during the testing.
Performance Benchmarking of YOLO Architectures for Vehicle License Plate Detection from Real-time Videos Captured by a Mobile Robot
665

Table 4 shows the results of the models evalu-
ated on the test dataset. It is shown that the perfor-
mance of some models (YOLOv2, YOLOv3, YOLOv3-
SPP and YOLOv3-tiny) decreases when it comes to
different distribution of data while others (YOLOv4
and YOLOv4-tiny) remain robust. Actually, YOLOv4
and its compressed version YOLOv4-tiny outperform
distinguishably all their previous versions. For the
precision (P), YOLOv4-tiny reveals the best output
with 95.23% whereas YOLOv4 reach out 98.62% for
the recall. This means that these two models detect
correctly the LP and they do not get confused with
similar-to-LP objects. As we mentioned in the met-
rics section, mAP gives a robust view on the perfor-
mances. Hence, we report also in Table 4 the obtained
mAP for each model although related works limit their
metrics only to the P/R. As expected, YOLOv4 and
YOLOv4-tiny land to be in the same mAP plateau
where the first one outdoes slightly by around 1% in
mAP.
In order to position our work among other related
state-of-the-art ones, it is fundamentally required to
evaluate the proposed module on different benchmark
datasets. Actually, there are not too many public
datasets to work with. The only one publicly avail-
able is the application oriented license plate (AOLP),
thereby we will consider it as our reference dataset.
This dataset contains 2,049 images of Taiwan license
plates. Images are categorized into three main sub-
sets: access control (AC), traffic low enforcement
(LE) and road patrolling (RP), based on their level
of difficulty in particular RP is the toughest category
in AOLP. AC, LE and RP contain respectively 681,
757 and 611 images. Table 5 summarizes the per-
formance evaluation of the proposed module on the
AOLP dataset. It is worth mentioning that previous
works used to do both the training and testing exclu-
sively on the AOLP which makes it easier for their
modules to reach up high results. In our settings,
things were arguably different; we trained the pro-
posed model on our PGTLP dataset, we fixed the
learned weights and then we passed to test on the
entire AOLP dataset. This is extremely beneficial
to check out the capacity of our model to general-
ize when it comes to a completely different and un-
seen dataset. We have noticed also that the AOLP im-
age are not fully annotated. This means that numer-
ous images have, for example, two LP instances but
only one LP was annotated in the ground-truth. They
were consequently a source of serious error since our
model was able to detect them while considering them
as false positives. Figure 2 highlights some instances
of the encountered issue.
Figure 2: Annotation issue with the AOLP dataset. The left
and right columns are the ground-truth annotations and the
detected boxes, respectively.
Figures 3 and 4 illustrate few result examples of
LP detection in AOLP and PGTLP datasets, respec-
tively using the YOLOv4-tiny architecture. By visual
inspection of the obtained results on the two datasets,
we note that the YOLOv4-tiny architecture provides
satisfying results.
(a) AC (b) LE (c) RP
Figure 3: Result examples of LP detection in AOLP dataset.
Figure 4: Result examples of LP detection in PGTLP
dataset. Images size is 640 × 480 pixels.
Table 3: Evaluation results of baseline models on the
PGTLP validation set. IS, IT and V denote the input size,
inference time and volume, respectively.
Model IS F
(%)
IoU
(%)
mAP
(%)
IT
(ms)
V
(MB)
V2
416 81 52.35 83.71 14.82
256
608 83 53.65 85.69 21.40
V3
416 95 77.24 99.47 26.76
235
608 93 76.10 98.98 43.57
V3-tiny
416 93 73.98 96.32 4.66
33
608 94 75.04 98.04 7.31
V3-SPP
416 94 77.34 99.36 27.55
239
608 95 79.98 99.09 44.56
V4
416 95 75.82 99.36 33.26
244
608 94 75.60 98.81 53.49
V4-tiny
416 93 69.48 94.25 5.25
22
608 96 81.78 98.63 8.04
5.2 Computational Cost
Since the highest priority for our application is to be
relevant to deal with real-time scenarios and high-
speed moving robot, we care a lot about the run-
ning time of the models. In real scenarios, more
than one vehicle will exist in front of the robot there-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
666
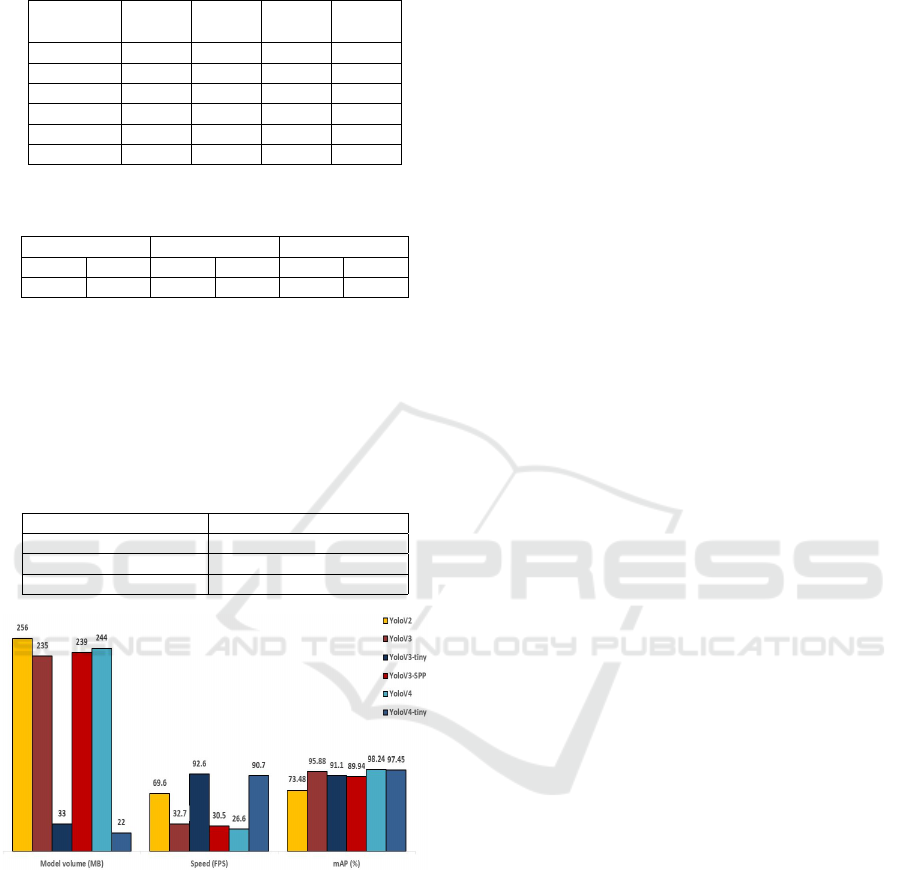
Table 4: Evaluation results of baseline models on the
PGTLP test set.
Model P
(%)
R
(%)
mAP
(%)
Speed
(FPS)
V4-tiny 95.23 94.21 97.45 90.70
V4 88.83 98.62 98.24 26.60
V3 80.13 95.59 95.88 32.70
V3-SPP 69.66 91.73 89.94 30.50
V3-tiny 88.12 87.87 91.10 92.60
V2 68.93 87.23 73.48 69.60
Table 5: Performance evaluation of the proposed module on
the AOLP dataset.
AC LE RP
P R P R P R
86.45 80.61 92.99 95.99 75.40 71.58
fore multiple LP will be out there. Table 6 presents
the time consumption (IT ) of YOLOv4-tiny applied to
1920 × 1080 images. The execution time lightly in-
creases with the increase in the number of LP. The
YOLOv4-tiny can process an image with three LP in
4.097ms.
Table 6: Time consumption considering the number of LP
per image. Images resolution is 1920 × 1080 pixels.
Number of vehicles Time (ms per image)
1 3.224
2 3.342
3 4.097
Figure 5: Comparison of baseline models in model volume,
speed and mAP score when input size is 416 × 416.
When it comes to videos, even though YOLOv4
has the best performance in terms of accuracy, it treats
video data slowly. On the other hand, the tiny version
of YOLOv3 is the fastest version and capable of run-
ning with 96 frames per second (FPS ). This goes the
same with YOLOv4-tiny which runs at 90FPS. An-
other important factor to consider is the memory con-
sumption of the model towards deploying and produc-
tion. Considering the limits imposed by computation
capability, a small model is extremely required. As
shown in Figure 5, YOLOv3-tiny and YOLOv4-tiny
versions are the smallest with respectively 33MB and
22MB of volume (V ). Hence, they seem to be suitable
for on-edge applications such as the security robot.
5.3 Observations and
Recommendations
To sum things up, the choice of the YOLO model re-
ally depends on the type of application to work on.
It is highly recommended to find a great compromise
between the metrics to identify the suitable detector.
For example, if we care, for the most part, about mak-
ing only correct predictions, then YOLOv4 is the ulti-
mate choice. In our context, we have two constrains:
processing power and memory space. Given this, we
opt for the YOLOv4-tiny detector. On one hand, it has
a great detection accuracy and high running speed.
On the other hand, it is very small in terms of stor-
age volume.
6 CONCLUSIONS AND FURTHER
WORK
In this paper, we take a step into LP detection. We
have presented a one-stage real-time LP detection
module in order to empower a mobile security robot.
Previous works used to deal with static scenarios
which is a narrow view of the problem. However,
in our work, we address the dynamic scenarios. To
do so, we put available the first Tunisian LP dataset.
The PGTLP dataset contains up to 3, 000 annotated
high resolution images captured by the “Pearl Guard”
which is a mobile robot of our industrial collabora-
tor “Enova Robotics”. Our dataset covers numerous
challenges such as different templates, angles, envi-
ronment backgrounds making it a major contribution
and subject to further experiments and contributions.
The main focal point of our work is to explore YOLO
detectors in the context of LP detection. Therefore,
we have conducted a thorough comparative study of
six variants of YOLO models from their theoretical
mechanisms to their working implementations. These
models have been subject to the same training/testing
procedure and evaluated in terms of precision, speed
and memory storage. We experimentally demonstrate
the effectiveness of the YOLOv4-tiny model to de-
tect LP in real-time videos which lands to be small
(22MB), precise (97.45%) and very fast (90.70FPS).
In the future, we are willing to develop the recognition
module to pull together the LPDR system puzzle. In
the same aim, we will enlarge the PGTLP to reach up
10,000 fully annotated images.
Performance Benchmarking of YOLO Architectures for Vehicle License Plate Detection from Real-time Videos Captured by a Mobile Robot
667

ACKNOWLEDGMENTS
This work has been supported by the VRR research
fund from the Tunisian Ministry of Higher Education
and Scientific Research that is gratefully acknowl-
edged. The authors would like also to thank our in-
dustrial partner “Enova Robotics” for providing ac-
cess to the PGTLP dataset.
REFERENCES
Arthur, D. and Vassilvitskii, S. (2006). k-means++: the ad-
vantages of careful seeding. Technical report, Stan-
ford.
Bulan, O., Kozitsky, V., Ramesh, P., and Shreve, M. (2017).
Segmentation-and annotation-free license plate recog-
nition with deep localization and failure identification.
ITS, 18(9):2351–2363.
Cortes, C. and Vapnik, V. (1995). Support-vector networks.
ML, 20(3):273–297.
Girshick, R. (2015). Fast R-CNN. In CVPR, pages 1440–
1448.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. In CVPR, pages 580–587.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask R-CNN. In ICCV, pages 2961–2969.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep resid-
ual learning for image recognition. arXiv preprint
arXiv:1512.03385.
Henry, C., Ahn, S. Y., and Lee, S. (2020). Multinational
license plate recognition using generalized character
sequence detection. IEEE Access, 8:35185–35199.
Hsu, G.-S., Ambikapathi, A., Chung, S.-L., and Su, C.-P.
(2017). Robust license plate detection in the wild. In
AVSS, pages 1–6.
Hsu, G.-S., Chen, J.-C., and Chung, Y.-Z. (2012).
Application-oriented license plate recognition. VT,
62(2):552–561.
Kendall, A., Badrinarayanan, V., and Cipolla, R. (2015).
Bayesian SegNet: model uncertainty in deep convolu-
tional encoder-decoder architectures for scene under-
standing. arXiv preprint arXiv:1511.02680.
Kessentini, Y., Besbes, M. D., Ammar, S., and Chabbouh,
A. (2019). A two-stage deep neural network for multi-
norm license plate detection and recognition. ESA,
136:159–170.
Krizhevsky, A., Sutskever, I., and Hinton, G. (2012). 2012
AlexNet. In NIPS, pages 1–9.
Ktata, S., Khadhraoui, T., Benzarti, F., and Amiri, H.
(2015). Tunisian license plate number recognition.
PCS, 73:312–319.
Latha, C. and Chakravarthy, G. (2012). An improved
Bernsen algorithm approaches for license plate recog-
nition. IOSR, 3(4):01–05.
Li, H. and Shen, C. (2016). Reading car license plates us-
ing deep convolutional neural networks and LSTMs.
arXiv preprint arXiv:1601.05610.
Li, H., Wang, P., You, M., and Shen, C. (2018). Reading
car license plates using deep neural networks. IVC,
72:14–23.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017). Focal loss for dense object detection. In ICCV,
pages 2980–2988.
Meng, A., Yang, W., Xu, Z., Huang, H., Huang, L., and
Ying, C. (2018). A robust and efficient method for
license plate recognition. In ICPR, pages 1713–1718.
Min, W., Li, X., Wang, Q., Zeng, Q., and Liao, Y. (2019).
New approach to vehicle license plate location based
on new model YOLO-L and plate pre-identification.
IP, 13(7):1041–1049.
Omar, N., Sengur, A., and Al-Ali, S. G. S. (2020). Cascaded
deep learning-based efficient approach for license
plate detection and recognition. ESA, 149:113280.
Pustokhina, I. V., Pustokhin, D. A., Rodrigues, J. J., Gupta,
D., Khanna, A., Shankar, K., Seo, C., and Joshi, G. P.
(2020). Automatic vehicle license plate recognition
using optimal K-Means with convolutional neural net-
work for intelligent transportation systems. IEEE Ac-
cess.
Rafique, M. A., Pedrycz, W., and Jeon, M. (2018). Vehi-
cle license plate detection using region-based convo-
lutional neural networks. SC, 22(19):6429–6440.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: unified, real-time object
detection. In CVPR, pages 779–788.
Redmon, J. and Farhadi, A. (2017). Yolo9000: better, faster,
stronger. In CVPR, pages 7263–7271.
Redmon, J. and Farhadi, A. (2018). Yolov3: an incremental
improvement. arXiv preprint arXiv:1804.02767.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster R-
CNN: towards real-time object detection with region
proposal networks. In NIPS, pages 91–99.
Safie, S., Azmi, N. M. A. N., Yusof, R., Yunus, M. R. M.,
Sayuti, M. F. Z. C., and Fai, K. K. (2019). Object
localization and detection for real-time automatic li-
cense plate detection (ALPR) system using RetinaNet
algorithm. In SAI, pages 760–768.
Selmi, Z., Halima, M. B., and Alimi, A. M. (2017). Deep
learning system for automatic license plate detection
and recognition. In ICDAR, volume 1, pages 1132–
1138.
Selmi, Z., Halima, M. B., Pal, U., and Alimi, M. A. (2020).
DELP-DAR system for license plate detection and
recognition. PRL, 129:213–223.
Silva, S. M. and Jung, C. R. (2017). Real-time Brazilian li-
cense plate detection and recognition using deep con-
volutional neural networks. In CGPI, pages 55–62.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., Rabinovich,
A., et al. (2014). Going deeper with convolutions.
arXiv preprint arXiv:1409.4842.
Xie, L., Ahmad, T., Jin, L., Liu, Y., and Zhang, S. (2018).
A new cnn-based method for multi-directional car li-
cense plate detection. ITS, 19(2):507–517.
Zeiler, M. D. and Fergus, R. (2014). Visualizing and un-
derstanding convolutional networks. In ECCV, pages
818–833.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
668
