
Investigating 3D Convolutional Layers as Feature Extractors for
Anomaly Detection Systems Applied to Surveillance Videos
Tiago S. Nazare, Rodrigo F. de Mello and Moacir A. Ponti
ICMC, Universidade de S
˜
ao Paulo, S
˜
ao Carlos, Brazil
Keywords:
Video Surveillance, Unusual Event Detection, Deep Learning.
Abstract:
Over the last few years, several strategies have been leveraged to detect unusual behavior in surveillance
videos. Nonetheless, there are still few studies that compare strategies based on 3D Convolutional Neural Net-
works to tackle such problem. This research gap has motivated the this work in which we aim at investigating
the features from a pre-trained C3D model and the training of fully 3D-convolutional auto-encoders for auto-
mated video anomaly detection systems, comparing them with respect to the anomaly detection performance
and the processing power demands. Additionally, we present an auto-encoder model to detect anomalous be-
havior based on the pixel reconstruction error. While C3D features coming from the first layers were shown to
be both better descriptors and faster to be computed, the auto-encoder achieved results comparable to the C3D,
while requiring less computational effort. When compared to other studies using two benchmark datasets, the
proposed methods are comparable to the state-of-the-art for the Ped2 dataset, while inferior when detecting
anomalies on the Ped1 dataset. Additionally, our experimental results support the development of future 3D-
CNN-based anomaly detection methods.
1 INTRODUCTION
One of the main applications of automated video
analysis systems is the surveillance of public places
such as squares, malls and airports (Mabrouk and Za-
grouba, 2018). In this particular domain, a computer
vision model can assist humans in attempt to avoid
missing out suspicious activities and, therefore, make
surveillance more effective. Such assistance is needed
due to two main reasons: (i) usually a single person
is in charge of monitoring several video feeds at the
same time, which increases the chance of missing out
some important event (Dee and Velastin, 2008); and
(ii) it has been shown that the attention of an individ-
ual drastically decreases just after monitoring surveil-
lance cameras for 20 minutes (Haering et al., 2008).
Therefore, a model that, for instance, highlights cam-
eras with higher probability of having some abnormal
event would be of great help.
In this context, a great deal of computer vi-
sion methods have been proposed to detect abnor-
mal events in surveillance videos using approaches
such as: optical-flow features (Colque et al., 2015;
Adam et al., 2008), Generative Adversarial Networks
– GANs (Ravanbakhsh et al., 2017), time series de-
composition (Ponti et al., 2017a), auto-encoders (Xu
et al., 2015), dictionary learning (Li et al., 2015), pre-
trained CNNs (Nazare et al., 2018b), (Ravanbakhsh
et al., 2018), (dos Santos et al., 2019) and contex-
tual approaches (Colque et al., 2018). Those methods
improved the results over time, nevertheless, most –
specially the ones based on CNNs – do not take into
account the amount of processing power required to
perform such task. This can pose a problem in sit-
uations where processing resources are limited, for
instance, the video may need to be processed using
the video recorder (e.g. a regular desktop) due to
bandwidth limitations (Muthusenthil and Kim, 2018).
Also, many studies do not justify well the use of spe-
cific deep network backbones and architectures.
Motivated by the aforementioned issues, we de-
vote our efforts to better understand the usage of 3D
CNNs for abnormal behavior detection in security
videos. In order to do so, we first use a pre-trained
C3D model (Tran et al., 2015) as feature extractor for
abnormal behavior detection in security videos. We
look at how the features generated by the convolu-
tional part of a pre-trained C3D model affects both
anomaly detection and computational requirements
from two angles: (i) when we vary the input shape
of the video, and (ii) when we extract features from
different convolutional layers. Therefore, this paper
Nazare, T., F. de Mello, R. and Ponti, M.
Investigating 3D Convolutional Layers as Feature Extractors for Anomaly Detection Systems Applied to Surveillance Videos.
DOI: 10.5220/0010347907530762
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
753-762
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
753

Figure 1: Anomaly score detection strategy comparison for
the two proposed methods. The first image illustrate the
results from C3D features which are based on local fea-
ture distances (less precise), while the second image shows
the pixel-level reconstruction provided by the auto-encoder
(more precise).
does not intent to overcome state-of-the-art results,
which often employ more sophisticated training and
post-processing mechanisms, but rather shed light on
the use of 3D convolutions as a way to better repre-
sent video data, so that future work can make better
use of such models as backbones to improve results.
We present novel empirical evidence on this ap-
plication including that: (i) extracting features from
bottom layers of the network, i.e. closer to the in-
put layer, improves the anomaly detection, while re-
ducing the processing demands to generate features;
(ii) reduction of video resolution produces a small
loss in anomaly detection performance, while mak-
ing the feature extraction considerably faster; (iii) a
domain-specific auto-encoder (which only uses 3D
convolutions) is capable of obtaining similar perfor-
mance when compared to the C3D features, while
have a much lower computational complexity. Fig-
ure 1 illustrates both approaches using heatmaps of
the local features obtained by C3D and AE-3D for
anomaly detection, as detailed in the next sections.
2 RELATED WORK
Noticeably, convolutional neural networks have
turned into the main framework to solve various com-
puter vision problems (Ponti et al., 2017b) (Goodfel-
low et al., 2016). One of the main reasons for that
is the ability for transfer learning, in which a model
that was trained in some dataset/domain is used on
a new and, sometimes rather different, domain (Ko-
rnblith et al., 2019) (Dos Santos et al., 2020) . In
such case, the pre-trained network is leveraged as a
feature extractor (Razavian et al., 2014) or as weight
initialization in attempt to improve the starting point
for training on a target application (Kornblith et al.,
2019; Yosinski et al., 2014).
One of the applications that has benefited from the
usage of transfer learning is the detection of anoma-
lous events in surveillance. For instance, in (Ravan-
bakhsh et al., 2018), the image region description gen-
erated by a pre-trained AlexNet (Krizhevsky et al.,
2012) is analyzed over time to detect unusual behav-
iors. In (Sultani et al., 2018), the authors used a pre-
trained C3D model as proposed by (Tran et al., 2015)
(originally trained for action recognition) as a fea-
ture extractor to detect unusual behavior on surveil-
lance videos. Nonetheless, in their study, the model
was used in classification setup what means that sam-
ples from the anomalous class were used during train-
ing. In (Nazare et al., 2018b), the authors compared
the features generated by several CNNs trained on
the ImageNet dataset (Deng et al., 2009) to detect
anomalies in security videos, while (dos Santos et al.,
2019) evaluated the ability of 2D CNNs to generalize
across different video surveillance datasets. The pre-
vious studies extracted features from each individual
frame and did not use any kind of temporal tracking,
their model only use the instant appearance to detect
anomalies.
Although those studies achieved good results with
regards to the detection of abnormal behavior in se-
curity videos – as pointed out previously – they may
not be suited for situations in which the amount of
processing power is limited. Considering this gap, in
this paper, we investigate three ways of reducing the
amount of computation needed to leverage 3D con-
volution in surveillance applications. The first ap-
proach, which is based on the findings of (Yosinski
et al., 2014), is to extract feature from convolutional
layers that are closer to the input of the network.
By doing so, we are able to reduce the processing
demands involved in extracting features (given that
we have fewer layers to execute a forwarding pass)
and we may also get better features (as pointed out
in (Yosinski et al., 2014)). The second approach com-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
754

Sequence of
video frames
Convolutional layers
(from a pre-trained C3D )
Extracted
C3D features
IPCA and
standard scalers
Anomaly scores
(using an 1-NN)
(a)
Conv3D 64 kernels (3✕3✕3)
MaxPooling3D (2✕2✕1)
Conv3D 128 kernels (3✕3✕3)
MaxPooling3D (2✕2✕2)
Conv3D 256 kernels (3✕3✕3)
Conv3D 256 kernels (3✕3✕3)
MaxPooling3D (2✕2✕2)
Conv3D 512 kernels (3✕3✕3)
Conv3D 512 kernels (3✕3✕3)
MaxPooling3D (2✕2✕2)
Conv3D 512 kernels (3✕3✕3)
Conv3D 512 kernels (3✕3✕3)
MaxPooling3D (2✕2✕2)
Dense 4096 neurons
Dense 4096 neurons
Softmax
Extractor 1 Extractor 2 Extractor 3 Extractor 4
(b)
Figure 2: Experimental setup diagram for C3D feature extraction.
prises the reduction of the frame sizes before pass-
ing them through the network, therefore reducing the
amount of pixels to be processed and, consequently,
the computation time required to generate features.
The third approach builds up a domain-specific auto-
encoder based only on 3D convolutions and use frame
its reconstruction error as an anomaly score.
3 EXPERIMENTAL SETUP
3.1 C3D Features
We start our experiments by using the experimental
setup presented in Figure 2 to better understand the
video anomaly detection of features extracted from
a pre-trained C3D network. On one hand, regarding
video anomaly detection (see Figure 2 (a)), uses ideas
presented in (Kornblith et al., 2019) but for the video-
surveillance scenario . On the other hand, concern-
ing the study of possible features to be extracted from
the pre-trained C3D model, our study is based on the
findings in (Yosinski et al., 2014).
In the first step of our setup, we extract features
from video segments of 16 consecutive frames by per-
forming a forward pass such video segments through
convolutional layers of a pre-trained C3D model. As
a result of this process, we obtain tensors that contain
the descriptions of 32 × 32 × 16 regions of the video
segment, which is used to detect anomalies in video
regions/frames.
Given the four different C3D layers that we are
going to use to extract features from 32 × 32 × 16
video regions, we need to interpreted the output ten-
sor differently for each case (layer). For example,
when extracting features from the last convolutional
layer of the C3D model (Extractor 4 in Figure 2 (b)),
we get an M × N × 512 tensor in which we have
a 512-dimensional feature vector to describe M × N
video regions of size 32 × 32 × 16 pixels. On the
other hand, when carrying out this process for Ex-
tractor 3, each 32 × 32 × 16 region is going to gen-
erate a 2 × 2 × 2 × 512 descriptor. In Table 1, we
present the number of feature generate by the four
different extractors when describing a video region
with 32 × 32 × 16 pixels. Since Extractors 1, 2 and
3 generate a large number of features, we applied a
3D pooling on their spatial dimension in order to re-
duce them to one and speedup the anomaly detection
process (see the third column of Table 1).
Table 1: Number of features generated by each extractor
when describing a 32 × 32 × 16 video region (before and
after pooling).
Extractor # of raw features
# of features
after pooling
1 8 × 8 × 8 × 128 = 65536 128
2 4 × 4 × 4 × 256 = 16384 256
3 2 × 2 × 2 × 512 = 4096 512
4 1 × 1 × 1 × 512 = 512 512
In the second step of our setup, we reduce
the number of features using the Incremental PCA
Investigating 3D Convolutional Layers as Feature Extractors for Anomaly Detection Systems Applied to Surveillance Videos
755
(IPCA) model (Ross et al., 2008). Additionally, we
apply a standard scaler before the IPCA transforma-
tion and another one after it. By applying these pre-
processing steps, we reduce the number of features
and make them follow a mean equals to zero and a
standard deviation equals to one. This helps the ap-
proximate nearest neighbor method that we employed
to detect anomalies (Muja and Lowe, 2014) in order
to achieve faster inference time and give the same im-
portance to all features.
Lastly, in the third step of our setup, we use our
nearest neighbor model to compute the Euclidean dis-
tance of each new video region to the closest sample
in the training data. Such distance is considered as
an anomaly scores, where greater distance values in-
dicate a greater chance of being an anomaly.
The setup described above allow us to compare
features generated by four different C3D extractors
with respect to their suitability as features for video
anomaly detection scenarios and their computational
requirements. Our experiments cover the hyperpa-
rameter variations present in in Table 2 that were se-
lected to explore both the anomaly detection results
and the computational cost of the pre-trained C3D
model. Finally, we compare the results of all these
experiments using the frame-level anomaly detection
results (AUC and EER) on the Ped1 and the Ped2
datasets.
Table 2: Values tested for each hyperparameter.
Parameter Values
Pooling type average, max
Frame resolution 192 × 128, 384 × 256
IPCA output dimensions 8, 16, 32, 64, 128
3.2 Auto-encoder
Next, based on the good video anomaly detection re-
sults of the auto-encoders present in (Xu et al., 2015),
we designed a fully 3D-convolutional auto-encoder
architecture to model normal behavior in surveillance
applications. Our network architecture, which is de-
picted in Figure 3, uses: 3 × 3 × 3 kernels in all con-
volutional layers, ReLU activation function in all lay-
ers, 2 × 2 × 2 size for both the max-pooling and up-
sampling operations, Batch Normalization in every
layer, Gaussian noise to corrupt the input video seg-
ment and MSE as the loss function.
Such model is trained to reconstruct 20 × 20 × 8
video segments extracted from training videos con-
taining only normal behaviors. During the anomaly
detection phase, the trained auto-encoder is used to
reconstruct video segments and the reconstruction er-
ror of each pixel is used as pixel-level anomaly score.
UpSampling3D (2✕2✕2)
Conv3D 8 kernels (3✕3✕3)
UpSampling3D (2✕2✕2)
Conv3D 16 kernels (3✕3✕3)
MaxPooling3D (2✕2✕2)
Conv3D 8 kernels (3✕3✕3)
MaxPooling3D (2✕2✕2)
Conv3D 4 kernels (3✕3✕3)
Conv3D 16 kernels (3✕3✕3)
Encoder Decoder
Figure 3: The auto-encoder architecture proposed.
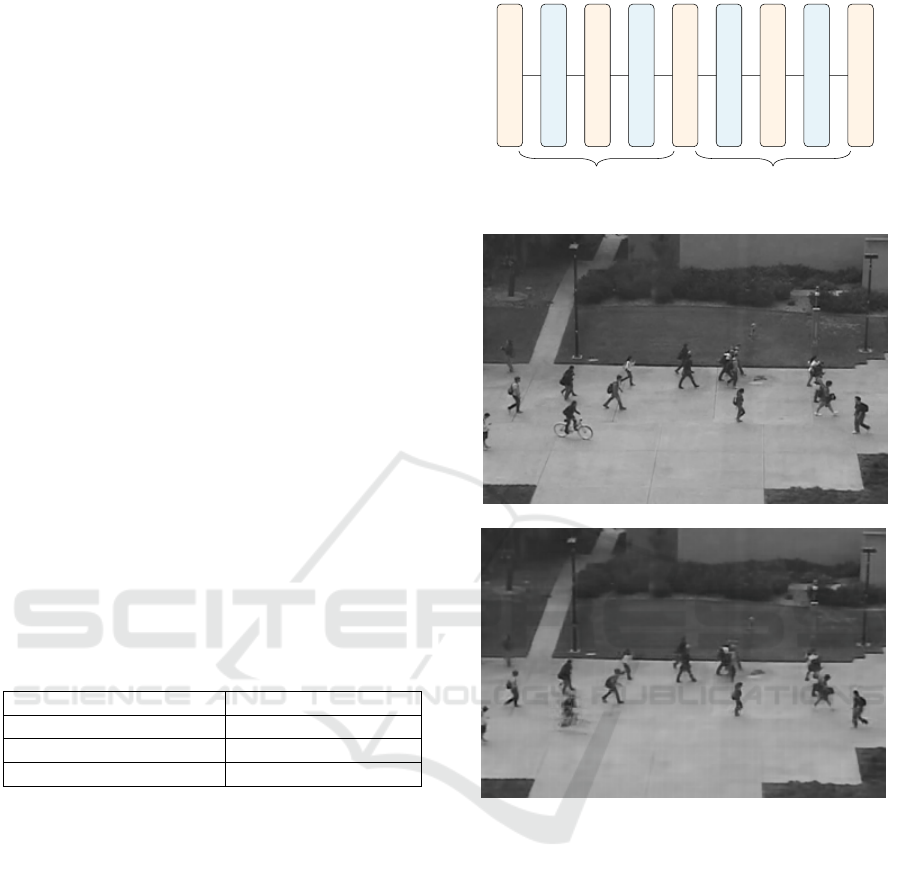
Figure 4: Frame reconstructed by our 3D auto-encoder ar-
chitecture. The first image shows the original frame, while
the second presents its reconstructed version.
To illustrate the usefulness of such reconstruction er-
ror, Figure 4 presents such process on a video frame
containing a single anomaly. Inspecting the result-
ing image, we can notice that the anomaly (a biker)
was poorly reconstructed, while the remaining of the
frame is rather similar to the original one.
3.3 Surveillance Video Datasets
Our experiments are based on the two UCSD datasets
– Ped1 and Ped2 – which were both obtained from se-
curity footage from the University of California San
Diego (Mahadevan et al., 2010; Li et al., 2014). This
means that, differently from other surveillance sets,
these datasets were obtained from real situations and,
therefore, are of great value to estimate the detec-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
756

tion performance of automated surveillance systems.
Those datasets remain important benchmarks, since
they describe a similar problems (detecting anomalies
in a pedestrian environment), but having different res-
olution, perspective, and types of anomalies. In par-
ticular Ped1 is more challenging while Ped2 is more
well-behaved. In Table 3 and Figure 5, we present,
respectively, some characteristics and some frames of
these two datasets.
Table 3: Dataset characteristics.
Characteristic
Dataset
Ped1 Ped2
# training videos 34 videos 16 videos
# test videos 36 videos 12 videos
resolution 238 × 158 360 × 240
fps 10 fps 10 fps
3.4 Reproducibility Remarks
In order to extract features from the security videos
using a pre-trained C3D model and create our auto-
encoder model, we have used the Keras (Chollet
et al., 2015) library. With regards to the training the
IPCA model to reduce the number of features, we
have employed the implementation available on the
Scikit-learn (Pedregosa et al., 2011) library. Fi-
nally, to estimate the distance of each new sample to
the training set, we have used the approximate nearest
neighbor method implemented on the FLANN (Muja
and Lowe, ) library. In order to make it easier to re-
produce our results, our source code was made pub-
licly available
1
.
4 RESULTS AND DISCUSSION
4.1 Pre-trained C3D Network
Based on our C3D feature extraction setup, we exper-
imented with different parameters. In our first experi-
ment, we tried to determine which configuration – re-
garding frame resolution, pooling method and number
of dimensions after the IPCA transformation – pro-
vides the best results on the Ped1 and Ped2 datasets.
The results of our C3D experiments are presented in
Table 4 and indicate that features from Extractor 2 ob-
tained overall better results. This is interesting mainly
due to the following reasons:
1. As the original C3D training dataset and our target
datasets (Ped1 and Ped2) are different, the more
1
Our source code is available at https://github.com/
tiagosn/c3d features anomaly detection.
generic features from Extractor 2 end up being
more suitable for the anomaly detection task; and
2. When comparing to Extractors 3 and 4, Extrac-
tor 2 requires a forward pass throughout less C3D
layers and, consequently, less processing power to
generate its features.
Regarding the usage of different pooling methods,
we noticed that combining an average pooling with
the C3D usually leads to better anomaly detection re-
sults. Such phenomenon is particularly evident when
we compared the AUC values obtained by the two
pooling methods using some boxplots (see Figure 6).
Also, in most cases, keeping a higher number of IPCA
dimensions (i.e. 64 or 128) generates better anomaly
detection results.
4.2 3D Auto-encoder
Next, we tested our auto-encoder architecture with
and without background subtraction. The results ob-
tained are shown in Table 5 and indicate that back-
ground subtraction does not makes a substantial dif-
ference on the anomaly detection performance. When
comparing against the C3D results, we can see that
the auto-encoder performed better on Ped1 (while
lacking behind regarding state-of-the-art results) and
worse on Ped2 (still being comparable to the best re-
sults for that dataset). Nonetheless, as shown in Ta-
ble 6, it is important to notice that our auto-encoder
uses far less parameters than the C3D feature extrac-
tors.
4.3 Discussion
We emphasize our aim is not to present SOTA re-
sults, but investigate how far can we get with 3D-
convolution-based deep networks, that can be lever-
aged as backbones or components of more sophis-
ticated methods. When comparing C3D and AE-
3D results to classic and state-of-the-art methods on
both USCD datasets (Ped1 and Ped2) as in Table 7,
we notice that both C3D and AE3D methods for
learning representations achieved remarkable results
on Ped2, specially regarding AUC comparisons even
when compared to recent work (Park et al., 2020). On
the other hand, on the Ped1 experiments, our results
are far from the state-of-the-art and only compara-
ble to classic approaches (specially the ones from the
models based on C3D features).
Another interesting observation is that, for Ped1
even CNN-2D features (Nazare et al., 2018b) were
better than C3D pre-trained features, showing the po-
sitional learning of 3D convolutions from previous
Investigating 3D Convolutional Layers as Feature Extractors for Anomaly Detection Systems Applied to Surveillance Videos
757
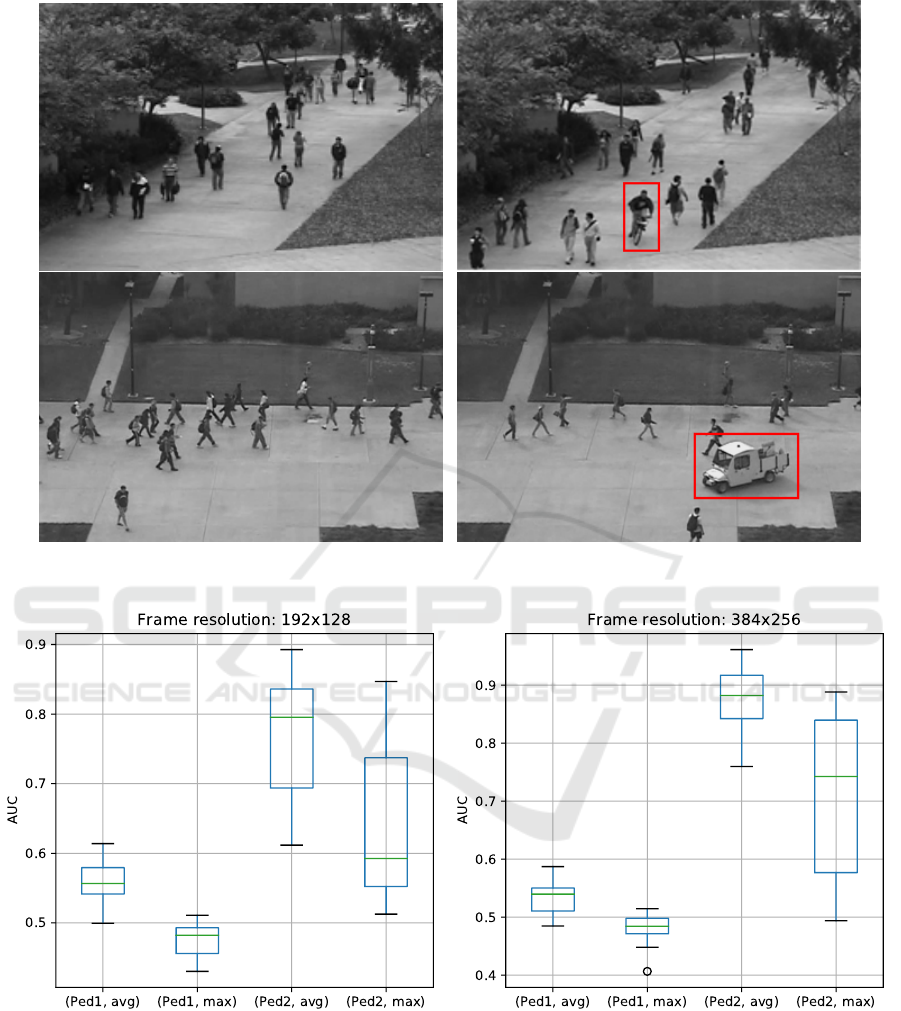
Figure 5: Some examples of frames from the two security video datasets. In the first row, we have frames from the Ped1
dataset, while the second shows frames from the Ped2 dataset. The anomalies are highlighted by red boxes.
Figure 6: Pooling method comparison. These results show that just by using average pooling instead of max pooling as the
last layer of the feature extractor, we can greatly improve anomaly detection results.
tasks may not be adequate when there is significant
relative distance between objects and camera.
This comparison also clearly indicates where the
learning process must become task-oriented: in a
more well behaved scenario such as Ped2, the use of
well selected features from a pre-trained network can
achieve results close to the state-of-the-art. On the
other hand, Ped1 frames has variation on both speed
and scale features of objects on the scene, which
makes it harder to flag anomalies correctly. Thus, it
is paramount to design systems that address such sce-
narios and this is why region-based methods works
better. However, by learning dataset-specific models,
and compensating too much for regions of the frame,
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
758
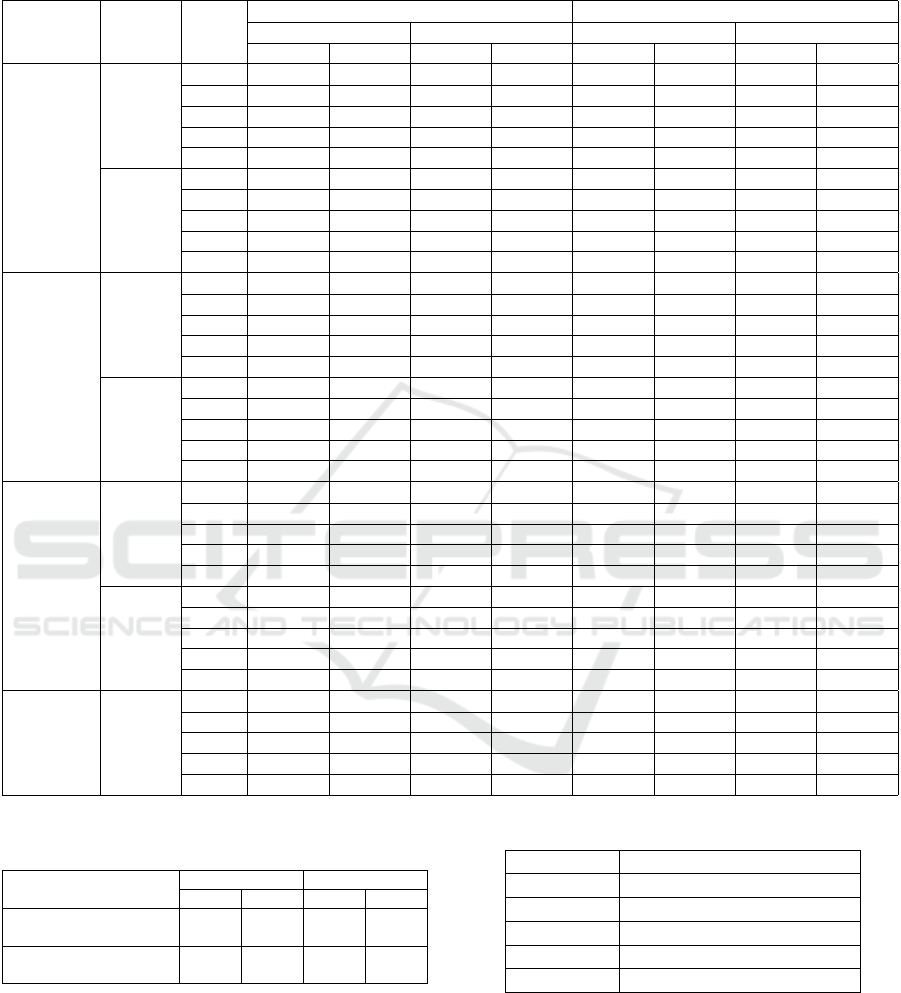
Table 4: Results obtained from the frame-level detection on the Ped1 and the Ped2 datasets. This results where obtained
using several different hyperparameter configurations (feature extractor, pooling method, number of IPCA features and frame
resolution). Please notice that the greater the AUC is, the better it is; and the lower the EER is, the better it is.
Extractor Pooling
IPCA
dims.
Ped1 Ped2
192 × 168 384 × 256 192 × 168 384 × 256
AUC EER AUC EER AUC EER AUC EER
1
avg
8 61.39% 42.21% 54.88% 48.06% 79.53% 28.29% 88.17% 20.14%
16 56.33% 44.08% 53.96% 47.03% 74.80% 31.80% 90.03% 17.18%
32 56.83% 45.41% 55.03% 45.95% 70.20% 33.77% 88.96% 19.47%
64 54.21% 47.58% 54.80% 45.28% 82.96% 25.57% 92.65% 15.41%
128 49.96% 51.14% 49.70% 52.03% 84.11% 21.48% 94.63% 11.96%
max
8 46.66% 52.88% 46.61% 51.99% 54.07% 42.95% 49.38% 50.43%
16 43.04% 54.73% 47.61% 51.91% 51.27% 45.62% 50.48% 48.95%
32 44.76% 54.23% 48.43% 52.22% 53.24% 46.52% 52.70% 49.51%
64 44.41% 53.69% 48.43% 51.02% 59.25% 42.90% 57.66% 45.90%
128 45.32% 52.34% 48.95% 52.60% 56.41% 43.82% 57.69% 44.35%
2
avg
8 57.94% 44.46% 58.71% 44.44% 68.58% 37.05% 77.18% 30.48%
16 57.95% 43.54% 53.58% 47.56% 68.10% 36.07% 83.45% 25.53%
32 59.44% 43.52% 55.00% 45.77% 70.52% 35.96% 90.77% 15.99%
64 58.65% 43.68% 56.60% 46.33% 89.26% 20.22% 94.61% 11.80%
128 54.33% 46.05% 57.02% 44.42% 88.44% 19.40% 96.12% 11.48%
max
8 49.46% 50.47% 49.95% 49.41% 57.57% 45.08% 67.03% 37.40%
16 48.44% 51.75% 49.72% 49.84% 53.27% 45.87% 79.46% 26.70%
32 48.24% 50.87% 49.94% 49.28% 58.03% 41.84% 82.26% 24.52%
64 48.10% 50.47% 49.86% 51.06% 77.71% 29.74% 85.66% 22.87%
128 48.69% 50.51% 51.45% 48.91% 84.70% 23.28% 88.83% 19.07%
3
avg
8 53.35% 47.10% 50.45% 49.34% 61.18% 44.79% 75.97% 30.99%
16 54.10% 46.34% 48.45% 51.16% 65.81% 40.80% 77.57% 30.93%
32 52.09% 48.41% 50.37% 50.06% 80.25% 26.04% 85.00% 22.61%
64 55.57% 46.89% 51.65% 48.90% 83.10% 23.27% 87.85% 18.36%
128 55.68% 46.40% 51.94% 48.84% 85.04% 22.62% 88.22% 16.72%
max
8 49.85% 49.47% 46.33% 52.78% 61.74% 43.23% 74.24% 29.02%
16 49.16% 50.01% 40.64% 56.32% 61.29% 46.56% 72.60% 33.11%
32 45.92% 53.10% 44.81% 53.72% 70.57% 32.56% 79.89% 25.05%
64 49.83% 51.08% 48.12% 51.28% 76.87% 30.47% 86.95% 18.76%
128 51.11% 48.90% 48.52% 50.36% 82.35% 28.20% 87.25% 17.18%
4 -
8 48.98% 50.78% 50.49% 50.25% 76.47% 30.07% 79.17% 24.32%
16 49.85% 49.87% 46.04% 53.53% 77.41% 27.54% 84.98% 18.84%
32 48.02% 50.95% 48.86% 51.92% 81.76% 23.20% 85.69% 17.43%
64 48.53% 51.03% 46.55% 53.61% 72.93% 30.11% 87.93% 16.07%
128 48.38% 51.40% 48.48% 51.66% 70.67% 32.39% 87.02% 16.11%
Table 5: Frame-level anomaly detection results for the pro-
posed auto-encoder.
Method
Ped1 Pe2
AUC EER AUC EER
3D-auto-encoder
(with bg subtraction)
64.8% 39.7% 91.0% 15.0%
3D-auto-encoder
(without bg subtraction)
67.7% 38.7% 90.0% 19.0%
the best methods on Ped1 end up obtaining worse per-
formance on Ped2 such as for (Xu et al., 2015; Ravan-
bakhsh et al., 2017; Ravanbakhsh et al., 2018).
We believe that the main reason for this low per-
formance are due to changes in space perspective (ob-
ject sizes change according to the image region that
they are located), something that our approach does
not take into account.
Table 6: Number of parameters of CNN in our experiments.
Model # of trainable parameters
AE-3D 9,364
Extractor 1 226,560
Extractor 2 2,881,280
Extractor 3 13,499,136
Extractor 4 27,655,936
5 CONCLUSION
The usage of 3D convolutions as a way to learn or
obtain representations to detect anomalies in security
videos is still a matter of investigation. A pre-trained
C3D model, especially when exploring different lay-
Investigating 3D Convolutional Layers as Feature Extractors for Anomaly Detection Systems Applied to Surveillance Videos
759
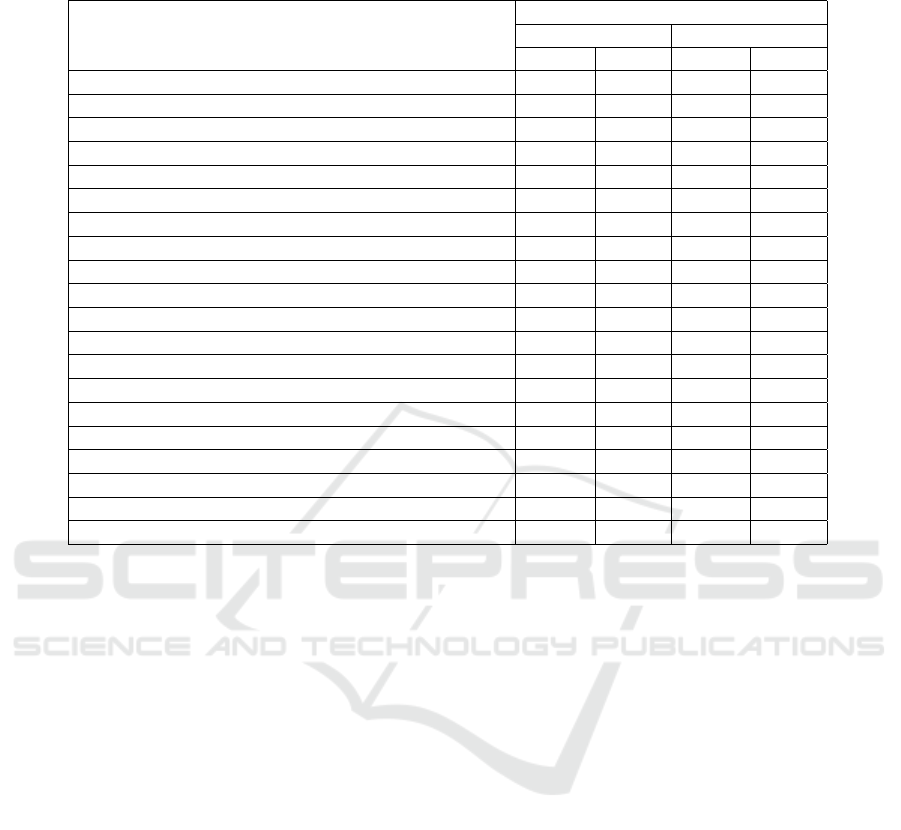
Table 7: Frame-level anomaly detection comparison on both UCSD datasets (Ped1 and Ped2). The lower the EER is, the
better it is; and greater the AUC is, the better it is.
Method
Dataset
Ped1 Ped2
AUC EER AUC EER
LMH (Adam et al., 2008) 63.4% 38.9% 58.1% 45.8%
MPPCA (Kim and Grauman, 2009) 59.0% 40.0% 69.3% 30.0%
Social force (Mehran et al., 2009) 67.5% 31.0% 55.6% 42.0%
Sparse reconstruction (Cong et al., 2011) - 19.0% - -
LSA (Saligrama and Chen, 2012) 92.7% 16.0% - -
Sparse combination (Lu et al., 2013) 91.8% 15.0% - -
MDT (Li et al., 2014) 81.8% 25.0% 82.9% 25.0%
LNND (Hu et al., 2014) - 27.9% - 23.7%
Motion influence map (Lee et al., 2015) - 24.1% - 9.8%
Composition pattern (Li et al., 2015) - 21.0% - 20.0%
HOFM (Colque et al., 2015) 71.5% 33.3% 89.9% 19.0%
AMDN (Xu et al., 2015) 92.1% 16.0% 90.8% 17.0%
Flow decomposition (Ponti et al., 2017a) - - - 31.7%
Adversarial discriminator (Ravanbakhsh et al., 2017) 96.8% 7.0% 95.5% 11.0%
Plug-and-play CNN (Ravanbakhsh et al., 2018) 95.7% 8.0% 88.4% 18.0%
CNN-2D features (Nazare et al., 2018b) 64.1% 40.4% 88.9% 19.6%
Siamese (Ramachandra et al., 2020) 86.0% 23.3% 94.0% 14.1%
Memory auto-encoder (Park et al., 2020) - - 97.0% -
C3D (best results) 61.4% 42.2% 96.1% 11.5%
AE-3D (best results) 67.7% 38.7% 91.0% 15.0%
ers, shows discriminative capacities for scenes with
low variation in speed and scale along the frames. A
3D auto-encoder, on the other hand, is also capable of
learning spatial-temporal features from normal data
and produce remarkable results when considering the
low number of parameters of such model.
Regarding the C3D features, we considered four
different layers as feature extractors, and concluded
that features from early layers (layers that are closer
to the network input) are better for such task, specially
when combined with average pooling layers. Such
results where matched by a 3D auto-encoder that has
a significantly lower number of parameters.
Those conclusions are enriched when we com-
pare the C3D and AE-3D with results from the liter-
ature. Well-behaved scenarios, such as Ped2 dataset,
benefit from 3D convolutions and need less effort to
be solved. However, the varying distance between
camera and objects of Ped1 makes it less a generic
problem in terms of positional-based feature learn-
ing via 3D convolutions. Therefore, we advocate
that 3D-convolution-based methods are adequate for
video anomaly detection, however one should com-
bine other mechanisms to compensate for changes
in scale and speed along the frame. With this, fu-
ture work may improve the design of systems without
trial-and-error and better coupling the power of deep
3D convolutional networks and other strategies.
Future studies may include C3D models previ-
ously trained on grayscale datasets since, according
to (Nazare et al., 2018a), this can make a consid-
erable difference in the overall results; use alterna-
tive CNN architectures designed for videos, such as
the ones presented in (Srivastava et al., 2015; Tran
et al., 2018); consider multi-resolution video process-
ing, which has been successfully used by (Xu et al.,
2015), to better deal with changes in space perspec-
tive.
ACKNOWLEDGMENT
This work was supported by FAPESP (grants
#2015/04883-0, and #2018/22482-0), CNPq (grants
#303886/2020-0 and #304266/2020-5) and par-
tially supported by CEPID-CeMEAI (FAPESP grant
#2013/07375-0).
REFERENCES
Adam, A., Rivlin, E., Shimshoni, I., and Reinitz, D. (2008).
Robust real-time unusual event detection using multi-
ple fixed-location monitors. IEEE Trans. Pattern Anal.
Mach. Intell.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
760

Chollet, F. et al. (2015). Keras. https://keras.io.
Colque, R. M., Caetano, C., de Melo, V. H. C., Chavez,
G. C., and Schwartz, W. R. (2018). Novel anoma-
lous event detection based on human-object interac-
tions. In VISIGRAPP (5: VISAPP), pages 293–300.
Colque, R. V. H. M., Caetano, C., and Schwartz, W. R.
(2015). Histograms of optical flow orientation and
magnitude to detect anomalous events in videos. In
Conference on Graphics, Patterns and Images (SIB-
GRAPI).
Cong, Y., Yuan, J., and Liu, J. (2011). Sparse reconstruction
cost for abnormal event detection. In CVPR 2011.
Dee, H. M. and Velastin, S. A. (2008). How close are we to
solving the problem of automated visual surveillance?
Machine Vision and Applications.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). ImageNet: A Large-Scale Hierarchical
Image Database. In CVPR09.
dos Santos, F. P., Ribeiro, L. S., and Ponti, M. A.
(2019). Generalization of feature embeddings trans-
ferred from different video anomaly detection do-
mains. Journal of Visual Communication and Image
Representation, 60:407–416.
Dos Santos, F. P., Zor, C., Kittler, J., and Ponti, M. A.
(2020). Learning image features with fewer labels
using a semi-supervised deep convolutional network.
Neural Networks.
Goodfellow, I., Bengio, Y., Courville, A., and Bengio, Y.
(2016). Deep learning, volume 1. MIT press Cam-
bridge.
Haering, N., Venetianer, P. L., and Lipton, A. (2008). The
evolution of video surveillance: an overview. Machine
Vision and Applications.
Hu, X., Hu, S., Zhang, X., Zhang, H., and Luo, L. (2014).
Anomaly detection based on local nearest neighbor
distance descriptor in crowded scenes. The Scientific
World Journal, 2014.
Kim, J. and Grauman, K. (2009). Observe locally, infer
globally: A space-time mrf for detecting abnormal
activities with incremental updates. In 2009 IEEE
Conference on Computer Vision and Pattern Recog-
nition(CVPR).
Kornblith, S., Shlens, J., and Le, Q. V. (2019). Do better
imagenet models transfer better? In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 2661–2671.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Advances in Neural Information Pro-
cessing Systems 25.
Lee, D.-g., Member, S., Suk, H.-i., and Park, S.-k. (2015).
Motion Influence Map for Unusual Human Activity
Detection and Localization in Crowded Scenes. Cir-
cuits and Systems for Video Technology, IEEE Trans-
actions on, 8215.
Li, N., Wu, X., Xu, D., Guo, H., and Feng, W. (2015).
Spatio-temporal context analysis within video vol-
umes for anomalous-event detection and localization.
Neurocomputing.
Li, W., Mahadevan, V., and Vasconcelos, N. (2014).
Anomaly detection and localization in crowded
scenes. IEEE Transactions on Pattern Analysis and
Machine Intelligence.
Lu, C., Shi, J., and Jia, J. (2013). Abnormal event detection
at 150 fps in matlab. In Proceedings of the 2013 IEEE
International Conference on Computer Vision, ICCV
’13.
Mabrouk, A. B. and Zagrouba, E. (2018). Abnormal behav-
ior recognition for intelligent video surveillance sys-
tems: A review. Expert Systems with Applications,
91:480–491.
Mahadevan, V., Li, W., Bhalodia, V., and Vasconcelos, N.
(2010). Anomaly detection in crowded scenes. In Pro-
ceedings of IEEE Conference on Computer Vision and
Pattern Recognition, pages 1975–1981.
Mehran, R., Oyama, A., and Shah, M. (2009). Abnormal
crowd behavior detection using social force model. In
CVPR.
Muja, M. and Lowe, D. G. FLANN: Fast Library for Ap-
proximate Nearest Neighbors.
Muja, M. and Lowe, D. G. (2014). Scalable nearest neigh-
bor algorithms for high dimensional data. Pattern
Analysis and Machine Intelligence, IEEE Transac-
tions on, 36.
Muthusenthil, B. and Kim, H. S. (2018). CCTV Surveil-
lance System, attacks and design goals”. Interna-
tional Journal of Electrical and Computer Engineer-
ing, 8(4):2072.
Nazare, T. S., de Mello, R. F., da Costa, G. B. P., and Ponti,
M. A. (2018a). Color quantization in transfer learning
and noisy scenarios: An empirical analysis using con-
volutional networks. In 2018 31st SIBGRAPI Confer-
ence on Graphics, Patterns and Images (SIBGRAPI).
Nazare, T. S., de Mello, R. F., and Ponti, M. A. (2018b). Are
pre-trained cnns good feature extractors for anomaly
detection in surveillance videos? arXiv preprint
arXiv:1811.08495.
Park, H., Noh, J., and Ham, B. (2020). Learning memory-
guided normality for anomaly detection. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition, pages 14372–14381.
Pedregosa, F., Varoquaux, G., Gramfort, A., Michel, V.,
Thirion, B., Grisel, O., Blondel, M., Prettenhofer,
P., Weiss, R., Dubourg, V., Vanderplas, J., Passos,
A., Cournapeau, D., Brucher, M., Perrot, M., and
Duchesnay, E. (2011). Scikit-learn: Machine learning
in Python. Journal of Machine Learning Research,
12:2825–2830.
Ponti, M., Nazare, T. S., and Kittler, J. (2017a). Optical-
flow features empirical mode decomposition for mo-
tion anomaly detection. In 2017 IEEE International
Conference on Acoustics, Speech and Signal Process-
ing (ICASSP).
Ponti, M. A., Ribeiro, L. S. F., Nazare, T. S., Bui, T.,
and Collomosse, J. (2017b). Everything you wanted
to know about deep learning for computer vision but
were afraid to ask. In 2017 30th SIBGRAPI con-
ference on graphics, patterns and images tutorials
(SIBGRAPI-T).
Investigating 3D Convolutional Layers as Feature Extractors for Anomaly Detection Systems Applied to Surveillance Videos
761

Ramachandra, B., Jones, M., and Vatsavai, R. (2020).
Learning a distance function with a siamese network
to localize anomalies in videos. In The IEEE Win-
ter Conference on Applications of Computer Vision,
pages 2598–2607.
Ravanbakhsh, M., Nabi, M., Mousavi, H., Sangineto, E.,
and Sebe, N. (2018). Plug-and-play cnn for crowd
motion analysis: An application in abnormal event de-
tection. In 2018 IEEE Winter Conference on Applica-
tions of Computer Vision (WACV).
Ravanbakhsh, M., Sangineto, E., Nabi, M., and Sebe, N.
(2017). Training adversarial discriminators for cross-
channel abnormal event detection in crowds. CoRR,
abs/1706.07680.
Razavian, A. S., Azizpour, H., Sullivan, J., and Carls-
son, S. (2014). CNN features off-the-shelf: An as-
tounding baseline for recognition. In Proceedings of
the 2014 IEEE Conference on Computer Vision and
Pattern Recognition Workshops, CVPRW ’14, pages
512–519, Washington, DC, USA. IEEE Computer So-
ciety.
Ross, D. A., Lim, J., Lin, R.-S., and Yang, M.-H. (2008).
Incremental learning for robust visual tracking. Int. J.
Comput. Vision, 77(1-3):125–141.
Saligrama, V. and Chen, Z. (2012). Video anomaly detec-
tion based on local statistical aggregates. In CVPR.
IEEE Computer Society.
Srivastava, N., Mansimov, E., and Salakhudinov, R. (2015).
Unsupervised learning of video representations using
lstms. In Proceedings of the 32nd International Con-
ference on Machine Learning. PMLR.
Sultani, W., Chen, C., and Shah, M. (2018). Real-world
anomaly detection in surveillance videos. CoRR,
abs/1801.04264.
Tran, D., Bourdev, L., Fergus, R., Torresani, L., and Paluri,
M. (2015). Learning spatiotemporal features with 3d
convolutional networks. In Proceedings of the 2015
IEEE International Conference on Computer Vision
(ICCV).
Tran, D., Wang, H., Torresani, L., Ray, J., LeCun, Y., and
Paluri, M. (2018). A closer look at spatiotemporal
convolutions for action recognition. In 2018 IEEE
Conference on Computer Vision and Pattern Recog-
nition, pages 6450–6459.
Xu, D., Ricci, E., Yan, Y., Song, J., and Sebe, N. (2015).
Learning deep representations of appearance and mo-
tion for anomalous event detection. In BMVC.
Yosinski, J., Clune, J., Bengio, Y., and Lipson, H. (2014).
How transferable are features in deep neural net-
works? In Advances in neural information processing
systems, pages 3320–3328.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
762
