
Location Techniques for the Design of a Walking Aid Network for
Visual Impaired Students
Chefi Triki
a
Division of Engineering Management and Decision Sciences, College of Sciences and Engineering,
Hamad Bin Khalifa University, Doha, Qatar
Keywords: p-center Location Techniques, Walking Aid System, Visually Impaired Students.
Abstract: Universities may have students with visual impairments that require support and facilities in order to ensure
for help them adequate educational experience. Fortunately, many universities have already adopted particular
solutions for those students by providing supportive services and advanced technologies. However, other
campuses are still left behind and, thus, special solutions are still to be implemented. This position paper
represents a preliminary study in this direction for a case-study university campus in Oman. It attempts to
employ the location optimization techniques to design a walking aid network with rest lounges for students
who are blind or suffer from a visual impairment. The walking network will connect the several classrooms,
the administrative offices and the service structures that these students frequently visit during their academic
day. The walking network will be equipped by tactile tiles and has, thus, budget and execution time restriction
for its implementation. For this purpose, our approach will consist in selecting a subset of the available routes
to be used for the tactile tiles installation purpose and also in developing the project management technique
that allows to complete the project in the minimum span time. Preliminary results on the implementation of
such techniques in the Omani University campus will be discussed.
1 INTRODUCTION
Visually impaired students are persons who are
categorized as seeing very low and those who have
total absence of sight and need support to achieve
their daily tasks. The causes of visual impairment
differ from one case to another such as diseases
damage after birth that causes blindness or vision
impairment which cannot be cured by surgery or
medication. This paper deals with the orientation
and movement problem that the visually impaired
people are daily facing. It discusses how network
location techniques can help the visual impaireds
and how walking aid systems and appropriate
infrastructure can positively affect their life.
Designing special tracks can help the visually
impaired people through directing them from a
point to another inside the University Campus.
Moreover, this study is useful to the society; visual
impairment people will not use any further
resources to help them in their mobility and can,
a
https://orcid.org/0000-0002-8750-2470
thus, practice their life and be productive as normal
citizens.
The walking aid system is a path made from
tactile paving surfaces, used by the visually
impaired students to help them in conveying the
information, and in moving around the university
facilities. Nowadays, it is frequent to observe how
several visually impaired university students suffer
while moving around the universities’ buildings.
This happens in different campuses, and specially
in those established in developing countries, such
as
Oman. This fact often causes embarrassment for
this category of students who are forced to ask for
help or to reduce their movement.
Moreover, these students face often dangerous
situation as highlighted by Legood et al. (2020) who
reviewed several papers and reported that “people
with visual impairment are 1.7 times more likely to
have a drop and 1.9 times more likely to have multiple
falls in everyday living activities as compared against
the normally sighted persons. Moreover, the chances
of getting a hip fracture are between 1.3 times and 1.9
Triki, C.
Location Techniques for the Design of a Walking Aid Network for Visual Impaired Students.
DOI: 10.5220/0010344704590466
In Proceedings of the 10th Inter national Conference on Operations Research and Enterprise Systems (ICORES 2021), pages 459-466
ISBN: 978-989-758-485-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
459

times more prominent for those with visual
impairment.”
This work attempts to have a positive ethical
impact, by contributing in making the environment of
the university suitable for all types and varieties of
students. We will take Sultan Qaboos University
(Oman) as a case study. In its vast campus, the
colleges, facilities, roads, offices and car parking
areas are distributed far away from each other and
consequently the visually impaired students are
facing many difficulties to move around the campus
because of the total absence of any walking aid
system. Moreover, the streets/corridors of the
university are generally not suitable for blind and
visually impaired students who are forced to face
dangerous situations while moving from one building
to another or crossing the streets. The walking aid
system will, thus, reduce the difficulty of movement
of visually impaired students, reduce the risk they are
daily facing and speed up their movement around the
campus buildings. The network to be designed will
also include a number of rest lounges to be selected
among a set of potential locations for the exclusive
use of these students when moving from one building
to another or just to have some relaxing time.
The contributions of this paper consist in using
facility location techniques in order to design an
optimized path to allow visually impaired students to
freely move at any time without relying on other’s
help or exposing themselves to danger. We will use
for this purpose the p-center location technique in
order to design and optimize the walking paths and
optimally locate the rest lounges. We will also apply
the critical path method to schedule the activities
related to its implementation. Facility location
techniques have been intensively used in a wide range
of applications, such as waste management (Ghiani et
al., 2012), freight transportation (Triki, 2016),
railway hubs planning (Mokhtarzadeh et al., 2020)
and groundwater management (Triki et al., 2020). We
are confident that they can be a valid tool even in the
context of this application.
This paper is structured as follows. Section 2 will
be devoted to the literature review. Section 3 will give
a detailed description of the optimization models and
approaches used to solve the problem under exam.
Finally, Section 4 will conclude the paper.
2 LITERATURE REVIEW
According to the World Health Organization, visual
impaired people are defined as people who face a
limitation in their actions and functions because of the
visual system. Also, they have a low vision which
makes them unable to perform their daily routines
properly. The causes of visual impairment are
identified to be total darkness, glaucoma, and age-
related macular degeneration. The National Eye
Institute added more details by specifying that such
visual deficiencies usually cannot be treated even
through the use of glasses, contact lenses, medication
or surgery. There are three types of visual deficiency
depending on the vision level: (i) low visual acuity,
(ii) blind and (iii) visual impairment.
Tactile was invented in 1967 by Mr. Seiichi
Miyake. Yamauchi and Yamauchi (2003) claimed
that the Tactile Tiles (called also Tactile Ground
Indicators) were installed for visually impaired
people the first time in the Japanese city of Okayama
in March 1967. Their use started to expand quickly in
Japan specially after 1985 when the Japan National
Railways adopted them for the design of the stations
platforms. Furthermore, the Japan Road Association
(1985) gave insights on the different types of tactile
tiles that were manufactured and installed in Japan.
This latter document represented a guideline on the
installation principles of tactile tiles and shows also
the errors and mistakes that are usually made during
the implementation process. Besides the Japanese
experience, there are several countries that pioneered
the installation of tactile tiles, such as Korea,
Australia and New Zealand (see:
https://www.nzta.govt.nz/assets/resources/road-
traffic-standards/docs/rts-14.pdf). Another country
that defined rigid standards for the design and use of
tactile paving is United Kingdom. Indeed, in 1998 the
“Guidance on the use of Tactile Paving Surfaces”
(DETR, 1998) was published having the aim of
efficiently installing tactile surfaces to help visually
impaired pedestrians in finding their way and in
gaining important information which related to the
environment, danger, and location directions. The
guideline defines a blister paving designed to warn
the visually impaired pedestrians and give them a set
of important information. Tactile paving is divided
into two categories depending on the nature of its use:
(i) warning surface that include blister indicators for
pedestrian crossing points, corduroy hazard warning
surface, platform edge off-street warning surface and
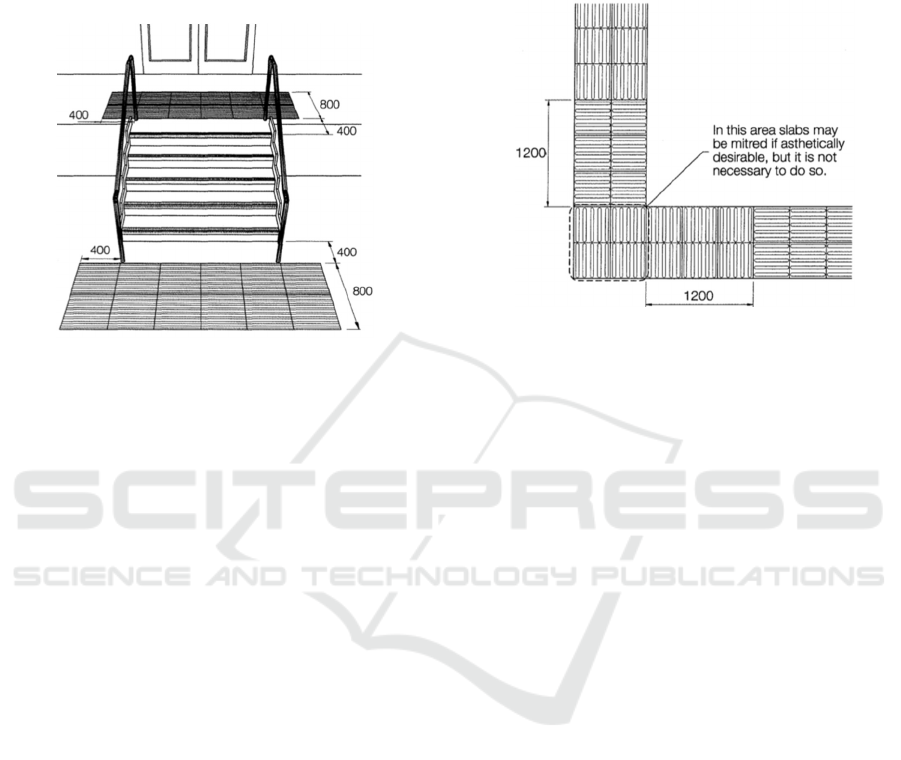
on-street platform warning surface (Figure 1) and (ii)
amenity surfaces which include guidance path and
information surfaces (Figure 2).
There are many other recent attempts to propose
feasible solutions to guide visual impaired persons
that make use of modern technologies. For example,
Crandall et al. (2001) suggested the “Talking Signs”
system that uses infrared transmitters in order to
ICORES 2021 - 10th International Conference on Operations Research and Enterprise Systems
460
generate audible signage to label key environment
features. The spoken messages transmitted on a beam
of infrared light will be received by an ad-hoc device
hold by the blind or visual impaired person. The
authors have shown that this system greatly helps in
gaining in safety, and independence.
Figure 1: Example of corduroy hazard warning surface at
the top and bottom of stairs (DETR, 1998).
Another example is related to the use of sensors
embedded in a jacket that blind persons must wear in
order to be guided accordingly (Sourab et al., 2015).
Five sensors in total are installed with the aim of
detecting potholes or stairs, obstacles near head, and
barriers in front, right and left directions. Chai et al.
(2020a) have reviewed 30 articles that have dealt with
the identification of the recent studies on the smart
technologies developed for supporting the visually
impaired for their daily activities that involve both
obstacle detection and ground plane hazards detection
(see also Chai and Lau, 2020b).
Besides proposing the enabling technology for
assisting visually impaired persons, there is
nowadays a very intensive research work directed to
the navigation aspect in order to help these
pedestrians to plan their routes from an origin to a
destination location (see for example Kammoun et al.,
2010, Yusof et al., 2015 and the very recent review of
Nawaz et al., 2020).
From the above literature analysis, it is clear that
the research in this field has focused mainly on the
pre-installation and post-installation aspects of the
tactile tiles surfaces. To the best of our knowledge, no
work has dealt with the phase in-between that consists
in optimizing the design of the tactile tiles walking
aid system and the underlying network in a big
campus. Clearly, this problem arises when such a
campus has not been designed since its construction
to encompass tactile tiles and it will result, thus,
extremely expensive to cover all the buildings at this
stage. The focus is, thus, on identifying the building
(classrooms, offices, departments, etc.) that visually
impaired students frequently visit and connect them
with an optimized path having tactile tiles and
identifying suitable places for rest lounges.
Figure 2: Example of layout of guidance path surface at a
right angle turn (DETR, 1998).
3 NETWORK OPTIMIZATION
APPROACH
According to Hoffman and Ralphs (2013) many
practical optimization problems can be better
modelled and analysed by means of the powerful tool
of network optimization. This latter consists on a
graph representation in which a set of nodes are
connected with a set of links (that can be either
directed arcs or simply undirected edges). Network
optimization has been successfully used to solve
several logistics problems such as designing
highways, streets, integrated circuits and
telecommunication networks (see Ahuja et al., 1993).
In this study, we will make use of two specific
network models, namely the p-center facility location
and the critical path project scheduling models.
Additional techniques, such as shortest route, may be
needed at several stages of the design. The network to
be designed is schematically represented in Figure 3,
in which all the university buildings can be connected
directly or through any of the rest lounges to be
activated (among those potentially available).
Our general approach is based on the following
steps:
Data Collection: data are mainly collected
through meeting visually impaired students in
order to understand their needs and to identify the
most important avenues they want the walking aid
system should reach.
Location Techniques for the Design of a Walking Aid Network for Visual Impaired Students
461
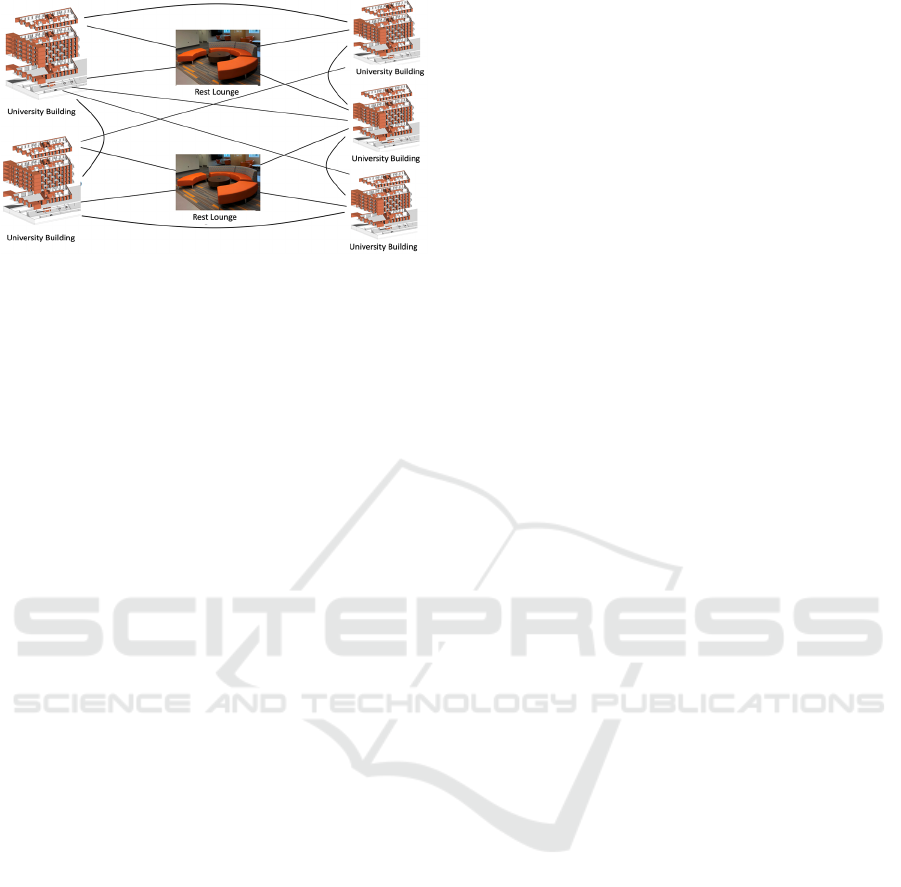
Figure 3: Network connecting the University buildings and
the rest lounges through feasible links.
Network Analysis: identify the main buildings
inside the campus the visually impaired students
frequently visit and try to meet their needs by
considering them as nodes of our optimization
network.
Network Algorithms: make use of the facility
location techniques in order to link all the
network’s nodes and to define, thus, the rest
lounges locations and the walking aid system
connecting all the buildings of interest at the
minimum paving cost.
Project Management: finally, the University
administration needs to have insights on the time
span required to complete implementing the
walking aid network and the sequence of its
execution. For this purpose, we will apply the
critical path method to determine the project
scheduling. The critical path method will allow to
identify all the critical steps that will define the
priorities among the activities and the duration of
the project. The resulting outcome will be very
helpful for the University managers to assess the
best time to start executing the project and its
implementation phases.
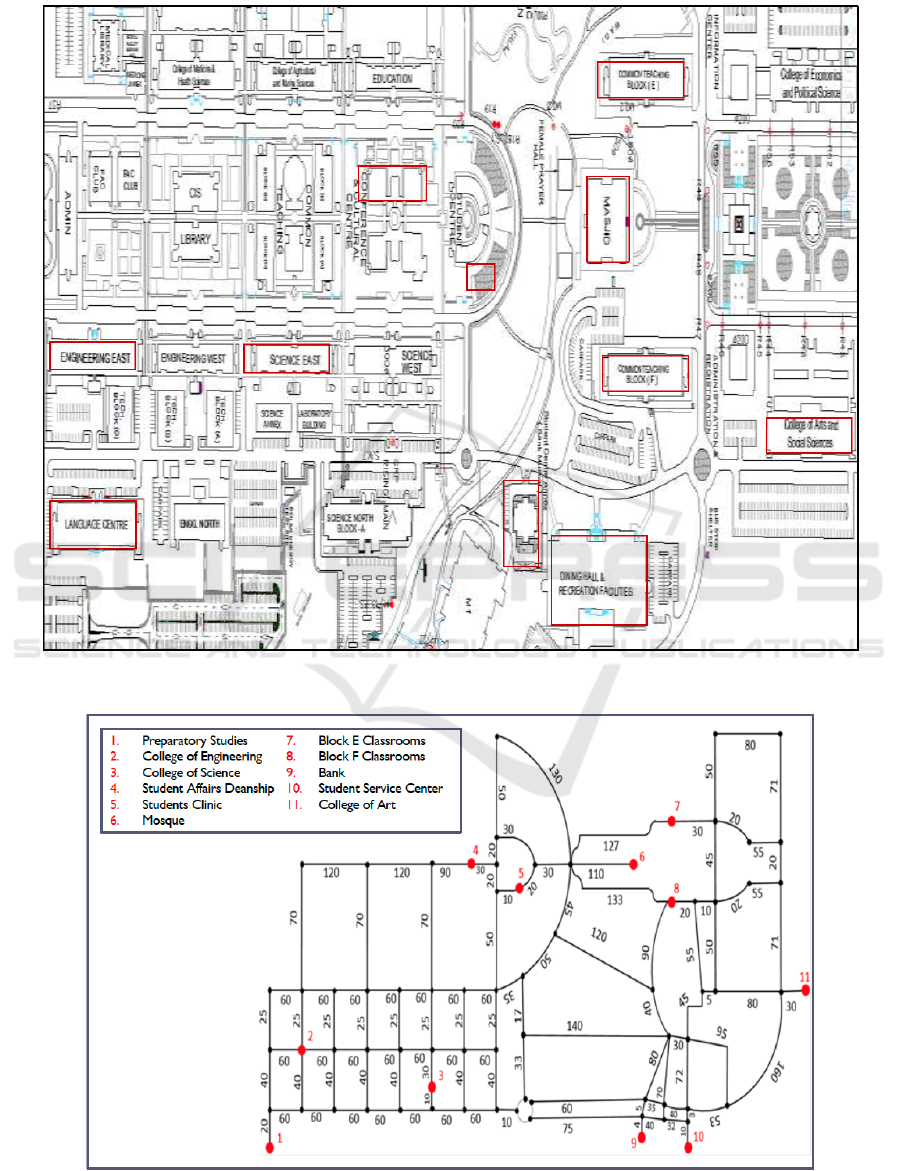
After executing the first step, the resulting
outcome can be represented as shown in Figure 4,
characterizing the University campus, with the main
avenues frequently visited by the visually impaired
students (identified in red color) to be considered as
nodes of the network in the sequel. The resulting
network is clearly a multi-graph since there exist
several possible connections between many pairs of
nodes. However, we represented for clarity the
corresponding network (in Figure 5 in the Appendix)
as a simplified graph showing only a subset of
possible connections between nodes.
3.1 The p-center Location Model
The p-center model is applied to the decisions related
to the location of service centers (typical examples
are fire brigade stations and first aid centers) in the
event that it is necessary to ensure equity of treatment
to a set of nodes spread over a large area (the
university campus in our case). The goal is to locate
p logistic nodes (rest lounges here) in the area with
the aim of minimizing the maximum transfer time
between a node and the lounge closest to it.
The problem can be formally represented on an
undirected bipartite graph G (V, N, E) in which V is
the set where the lounges can be positioned, while E
is the set of edges identify all possible links between
the various nodes. Moreover, N indicates the set of
the destination buildings that are of interest to the
visually impaired students. Often, in these kind of
applications, sets V and N can coincide which means
that any destination building can be the location of a
potential lounge node as well. However, in the sequel
we will consider them different for the sake of
generality and to allow flexibility in adding or
removing any node to be (or not to be) considered as
a possible lounge location. To each edge (i,j)
∈
is
associated a cost d
ij
representing the length of edge
(i,j), i.e. the distance from node i to node j. In the
particular case of a given building will be also
selected as a lounge location, then the building-
lounge distance will be equal to zero. The problem
will consists in minimizing the maximum distance
between any of the destination buildings and the
closest lounge to it. In this way, we are minimizing
the uncomfortableness of the visually impaired
students to reach a lounge from any of the buildings
of interest for them. The model’s decision variables
are as follows (see Daskin, 2013):
(
∀ ∈ ,∀ ∈
is 1 if destination building j
can be served by the lounge placed in node i.
Otherwise
0;
(
∀ ∈
is 1 if a lounge is to be located at node
i, and zero otherwise.
Thus, the lounge location problem formulated as
a p-center model can be expressed mathematically as:
Min
(1)
S.t.
∈
1 ∀∈
(2)
∈
∀∈
(3)
∈
(4)
∀ ∈ ,∀ ∈
(5)
∈
0,1
∀ ∈ ,∀ ∈
(6)
∀ ∈
(7)
ICORES 2021 - 10th International Conference on Operations Research and Enterprise Systems
462

The objective function (1) minimizes the
variables v which represents the maximum distance
between any destination building and its assigned
lounge. Such unrestricted variable v is defined
through constraints (3) as the highest distance of any
building-lounge assignment. Constraints (2) ensure
that every destination building is assigned to at least
one lounge. Constraint (4) will limit the number of
lounges to be opened to an upper bound value p. Such
parameter p is defined by the decision maker (the
University in this case). Set of Constraints (5) will
ensure that no destination building j will be assigned
to any node i if no lounge will be activated in that
node. Finally, Constraints (6) and (7) define the
binary nature of the decision variables.
The defined model (1)—(7) results to be a mixed
integer linear optimization program whose size
increases with size of the underlying graph. The
complexity of such the model depends to a big extend
on the value of the parameter p, as will be discussed
in the next subsection.
3.2 Solution Approaches for the
p-center Model
The specific case of 1-center location problem (i.e. in
which one single lounge must be located in the
network) the problem can be easily and efficiently
solved through the well-known algorithm of Hakimi
(Hakimi et al., 1978). However, for the general case
of p
2, the p-center model is known to be an NP-
hard problem (Ghiani et al., 2013). Therefore, the
solution of moderate sized instances can be
performed by solving the p-center optimization
model (1)—(7) by using exact solution methods such
as those implemented within the general purpose
commercial solvers Cplex,
Gorubi or Lingo.
Alternatively, specialized exact algorithms, such as
that developed by Daskin (2013), can be adopted and
applied. For example, the specific case of the network
shown in figure 5, having a limited number of nodes,
can be solved without difficulties with exact solvers
(a solution for p=2 is shown in Figure 6). However,
when the size of the problem (i.e. number of nodes)
increases, the instances become of large-scale and,
thus, the development of heuristic and/or meta-
heuristic approaches becomes necessary in order to
obtain a solution in a reasonable amount of time. This
will be certainly the case whenever the University
decides to cover not only part of the existing
buildings, but rather all the different structures of its
huge campus. There are several non-exact methods
that have been proposed in the scientific literature and
that can be employed to solve large-scale p-center
models (see the recent survey by Çalık et al., 2019).
Examples of such heuristics include the one developed
by Mihelic and Robic (2005) who used a
decomposition approach that consists in solving a
finite series of minimum dominating set problems.
Also, Bozkaya and Tansel (1998) developed a heuristic
method in which the p-center model is expressed in
terms of the spanning tree problem. Several meta-
heuristic approaches have been also developed to solve
the p-center problem, such as multi-start local search,
tabu-search, variable neighborhood search and
memetic genetic algorithm (see (Mladenovic et al.,
2003 and Pullan, 2008). The other direction of
investigation towards solving p-center instances
consisted in identifying lower and upper bounds that
were combined with Daskin’s algorithm in order to
design efficient a multi-level meta-heuristic approach
(Salhi and Al-Khedhairi, 2010).
4 CONCLUSIONS
The aim of this position paper is to apply network
optimization techniques that will help in designing a
walking aid network for visual impaired students in a
big University campus. The network will also involve
the location of a set of rest lounges to be used by the
visually impaired students during their movements
from one building to another. We suggest to use here
the p-center location method to solve this problem.
However, after the coding and carrying out an
experimental study it should be easy to understand if
the results of these techniques can be considered as
satisfactory, or more specialized approaches should
be adopted. Moreover, if the number of
offices/building increases, then solving exactly the p-
center model is not tractable and adopting heuristic or
metaheuristic approaches becomes necessary. This is
a preliminary work that should be completed.
ACKNOWLEDGEMENTS
The author have carried out part of the work related
to this article while he was affiliated with Sultan
Qaboos University. The support given the students,
staff and the administration of Sultan Qaboos
University is highly appreciated.
Location Techniques for the Design of a Walking Aid Network for Visual Impaired Students
463

REFERENCES
Ahuja, R. K., Magnanti, T. L., Orlin, J. B., 1993. Network
Flows: Theory, Algorithms, and Applications, Prentice
hall.
Bozkaya, B. and Tansel, B., 1998. A spanning tree
approach to the absolute p-center problem. Locat Sci
6:83–107.
Çalık, H., Labbé, M., and Yaman, H., 2019. p-Center
problems. In Location science, pp. 51-65. In Laporte,
G., Nickel, S., & Saldanha-da-Gama, F. (Eds). Location
Science. Springer, Cham.
Chai, A.B.C., Lau, B.T., Pan, Z., Chai, A.W., Deverell, L.,
Al Mahmud, A., McCarthy, C. and Meyer, D., 2020a.
Comprehensive Literature Reviews on Ground Plane
Checking for the Visually Impaired. In Technological
Trends in Improved Mobility of the Visually
Impaired (pp. 85-103). Springer, Cham.
Chai, A.B.C. and Lau, B.T., 2020b. Exploring the outdoor
performance of a LiDAR-based ground plane checking
system for the visually impaired. EAI Endorsed
Transactions on Pervasive Health and Technology,
6(23).
Crandall, W., Bentzen, B. L., Myers, L., Brabyn, J., 2001.
New orientation and accessibility option for persons
with visual impairment: transportation applications for
remote infrared audible signage. Clinical and
experimental Optometry, 84(3): 120-131.
Daskin M.S., 2013. Network and discrete location: models,
algorithms, and applications, 2
nd
Edn. Wiley, Hoboken.
DETR, 1998. Guidance on the use of Tactile Paving
Surfaces. Department of Environment, Transport and
the Regions. United Kingdom. Available at:
https://assets.publishing.service.gov.uk/government/up
loads/system/uploads/attachment_data/file/289245/tact
ile-paving-surfaces.pdf (last accessed on 12 Nov.
2019).
Fu, L., Sun, D., Rilett, L. R., 2006. Heuristic shortest path
algorithms for transportation applications: state of the
art. Comp. & Operations Research, 33(11): 3324-3328.
Ghiani, G., Laporte, G. and Musmanno, R.,
2013. Introduction to logistics systems management.
John Wiley & Sons.
Ghiani, G., Laganà, D., Manni, E. and Triki, C., 2012.
Capacitated Location of Collection Sites in an Urban
Waste Management System, Waste Management,
32(7), pp. 1291–1296.
Hakimi, S.L., Schmeichel, E.F. and Pierce, J.G., 1978. On
p-centers in networks. Transportation Science, 12(1),
pp.1-15.
Hoffman, K. L., Ralphs, T. K., 2013. Integer and
combinatorial optimization. In Encyclopaedia of
Operations Research and Management Science, 771-
779.
Japan Road Association, 1985. The Guideline for Tactile
Tile Installation for Visually Impaired Person (in
Japanese).
Kammoun, S., Dramas, F., Oriolaand, B., Jouffrais, C.,
2010. Route Selection Algorithm for Blind Pedestrian.
International Conference on Control, Automation and
Systems KINTEX, Gyeonggi-do, Korea.
Legood, R, Scuffham, P & Cryer, C., 2020. Are we blind to
injuries in the visually impaired? A review of the
literature. Injury Prevention, 8(2): p. 155.
Mihelic, J. and Robic, B., 2005. Solving the k-center
problem efficiently with a dominating set algorithm. J
Comput Inform Technol 13:225–233.
Mladenovic, N., Labbé, M. and Hansen, P., 2003. Solving
the p-center problem with tabu search and variable
neighborhood search. Networks 42:48–64.
Mokhtarzadeh, M., Tavakkoli-Moghaddam, R., Triki, C.,
and Rahimi, Y., 2020. A hybrid of clustering and meta-
heuristic algorithms to solve a p-mobile hub location-
allocation problem with the depreciation cost of hub
facilities. To appear on Engineering Applications of
Artificial Intelligence.
Nawaz, W., Khan, K.U. and Bashir, K., 2020. A Review on
Path Selection and Navigation Approaches Towards an
Assisted Mobility of Visually Impaired People. KSII
Transactions on Internet and Information Systems
(TIIS), 14(8), pp.3270-3294.
Pullan, W., 2008. A memetic genetic algorithm for the
vertex p-center problem. Evol Comput 16:417–436.
Rygorash, O., Zhou, Y., Jorgensen, Z., 2006. Minimum
spanning tree based clustering algorithms. In 18th IEEE
International Conference on Tools with Artificial
Intelligence, ICTAI'06., 73-81.
Salhi, S. and Al-Khedhairi, A., 2010. Integrating heuristic
information into exact methods: the case of the vertex
p-centre problem. J Oper Res Soc 61:1619–1631.
Sekiguchi, H., Nakayama, H., 2002. On a history and a
present circumstances of walking aid for persons with
visual impairment in Japan. 5th International
Conference on Civil Engineering, Manila, Philippines.
Sharma, P., Khurana, N., 2013. Study of optimal path
finding techniques. International Journal of
Advancements in Technology, 4(2): 124-128.
Sourab, B.S., Ranganath Chakravarthy, H. S., Dsouza, S.,
2015. Design and implementation of mobility aid for
blind people. International Conference on Power and
Advanced Control Engineering, ICPACE-2015.
Triki, C., 2016. Location-Based Techniques for the
Synergy Approximation in Combinatorial
Transportation Auctions, Optimization Letters 10 (5),
pp. 1125-1139.
Triki, C., S. Zekri, A. Al-Maktoumi, and Bazargan-Lari, M.
R., 2020. Optimal Location of Wells for Storage and
Recovery of Surplus Desalinated Water in Coastal
Aquifers. Groundwater, 58(5), pp. 831-841.
Yamauchi, S., Yamauchi, Y., 2003. Tactile Ground Surface
Indicators for Blind Persons. National Rehabilitation
Center for Blind Persons
http://www.rehab.go.jp/english/whoclbc/pdf/E13.pdf.
Yusof, T.S.T., Toha, S.F., Yusof H. Md., 2015. Path
Planning for Visually Impaired People in an Unfamiliar
Environment Using Particle Swarm Optimization.
Procedia Computer Science, 76: 80 – 86.
ICORES 2021 - 10th International Conference on Operations Research and Enterprise Systems
464
APPENDIX
Figure 4: Campus map with the buildings of interest for visually impaired students highlighted in red color.
Figure 5: Resulting network (a simplified graph showing only a subset of possible connections between nodes).
Location Techniques for the Design of a Walking Aid Network for Visual Impaired Students
465
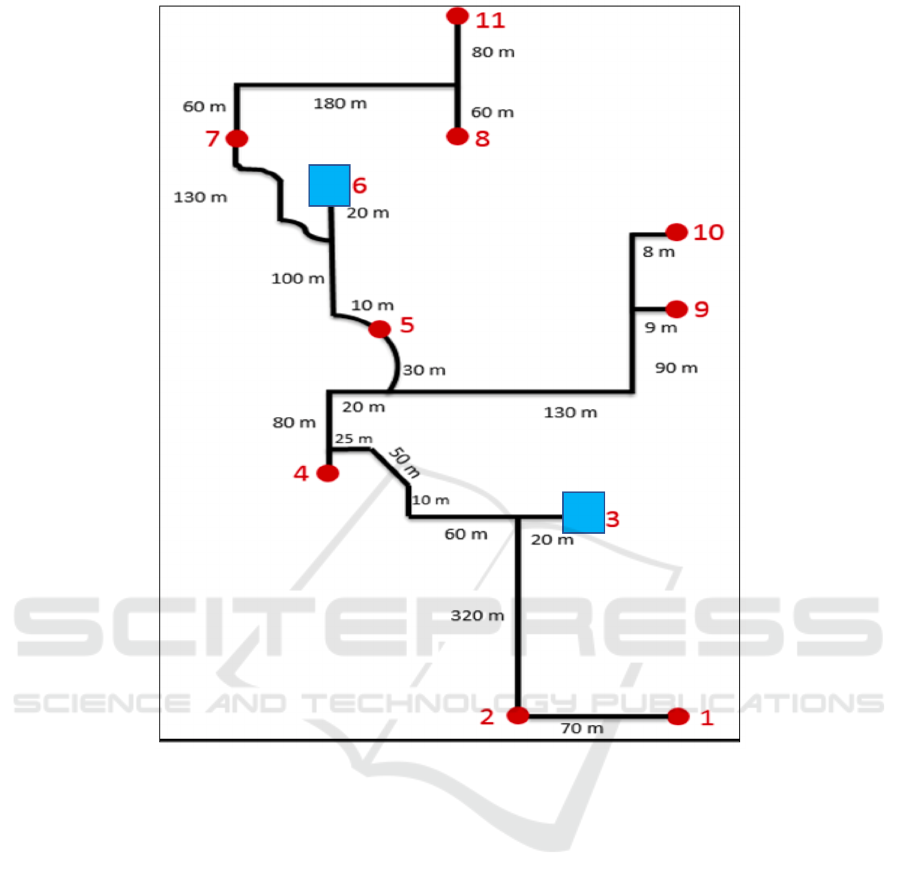
Figure 6: A solution representation with 2 rest lounges (placed in nodes 3 and 6).
ICORES 2021 - 10th International Conference on Operations Research and Enterprise Systems
466
