
Soft Active Dynamic Brace for Spinal Deformities
Athar Ali
1a
, Vigilio Fontanari
1b
, Marco Fontana
1c
and Werner Schmölz
2d
1
Department of Industrial Engineering, University of Trento, Italy
2
Medizinische Universität Innsbruck, Austria
Keywords: Dynamic Brace, Scoliosis, Corrective Orthosis, Twisted String Actuator, Spinal Exoskeleton.
Abstract: Scoliosis is a 3D deformity of the spine which not only limits the daily activities but in severe cases results in
damaging the musculoskeletal, respiratory and nervous system. A conventional way to treat spine deformity
is to wear braces. Braces are usually static, rigid and passive and they do not allow the mobility to the spine.
This causes the issues of spine stiffness and weakening of the muscles around the spine, which results in other
spine complexities such as the flat back. In this study, we have developed a soft active dynamic brace which
not only applies the 3D corrective forces but also allow the mobility to the spine. The brace applies the
corrective forces using elastic bands, whose tension is being controlled using lightweight twisted string
actuation (TSA) mechanism. TSA generates a higher pulling force using low torque motors, which not only
reduce the weight of the device but also the metabolic cost.
1 INTRODUCTION
Scoliosis is an abnormality of the spinal curve and
every year over 600,000 people are being treated with
this disease in United States (Ogilvie, 2010). Patients
with scoliosis feel comfortable in the deformed pose
and with the growth of the spine in the wrong posture,
the deformity or the cob angle also increases. The
conventional way to treat the spine deformity is to use
braces. A brace is mostly recommended to the
adolescence patients whom spine is still growing and
their cob angle is less than 30-40
o
. If the cob angle is
greater than 40
o
than surgery is imminent(Zaina et al.,
2014). Several braces have been developed in the mid
20th century such as Milwaukee(Blount et al., 1958;
Lonstein & Winter, 1994), Boston(Emans et al.,
1986; Périé et al., 2003), Chêneau(Hopf & Heine,
1985; Rigo & Weiss, 2008), Charleston(Lee et al.,
2012) and Lyon brace(De Mauroy et al., 2008). These
braces differ based on their rigidity, symmetry,
openings (posterior/ interior), breathing technique
and principle of correction(Grivas et al., 2018). Some
braces are constructed to apply de-rotation and
tractive force to the spine (Lonstein & Winter, 1994)
a
https://orcid.org/0000-0002-5936-447X
b
https://orcid.org/0000-0001-8236-522X
c
https://orcid.org/0000-0002-5691-8115
d
https://orcid.org/0000-0003-2962-2594
or pure spine bending (Wiemann et al., 2014), while
others are custom-made to provide three-point
pressure bending along with de-rotation on abnormal
spine curves and apices (Park et al., 2018; Rigo &
Weiss, 2008).
Although braces are quite effective in limiting the
curve progression or even correcting the cobb angle.
However, their passive, rigid, and static designs limit
the motion of the spine column. Results in stiffening
of the spine and weakening of the muscles around it.
Rigid braces affect cardiopulmonary efficiency and
also cause skin breakdown and abnormal bone
deformation. Therefore, designing a brace or spinal
exoskeleton which allows the necessary movements
and bring back the patient to correct posture is
needed. That kind of dynamic brace can also be used
as an assistive device after post-operative
rehabilitation to stabilize the spine and keeping the
spine in a correct posture.
Some soft braces such as Spinecor (Gutman et al.,
2016; Wong et al., 2008), ScoliSMART
(Morningstar, 2013) and Tria-C (Veldhuizen et al.,
2002) have also been developed to enhance mobility
and comfort, but they are passive and have no control
Ali, A., Fontanari, V., Fontana, M. and Schmölz, W.
Soft Active Dynamic Brace for Spinal Deformities.
DOI: 10.5220/0010343301690174
In Proceedings of the 14th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2021) - Volume 1: BIODEVICES, pages 169-174
ISBN: 978-989-758-490-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
169

over the amount of force being applied. The
University of Colombia developed an active dynamic
brace named ROSE(Murray et al., 2020; Park et al.,
2018). It applies corrective forces at the different
cross-sections of the torso while allowing the
mobility. ROSE uses two-layer Stewart platform
which is actuated using eight series actuators. These
actuators increased the weight as well as the power
consumption of the device. Braces are supposed to be
worn over 18 hours a day which limits the use of
ROSE dynamic brace.
This article presents the design of the novel soft
active dynamic brace using twisted string actuation
mechanism. This article focuses on the design
requirements and modelling of twisted string actuator
for the soft active dynamic brace to treat scoliosis.
The objective of the research is to develop a brace
which can apply controlled forces and allow the
movement of the spine to overcome the limitation of
passive rigid braces.
2 ACTIVE DYNAMIC BRACE
The active dynamic brace is a soft brace developed to
treat spine deformities and enhance the comfort and
mobility of the spine. The brace uses a compact
lightweight actuation mechanism to apply corrective
forces to the spine. Following sections explain the
brace working principle, design and actuation
mechanism etc.
2.1 Working of Brace
The active dynamic brace uses elastic resistance to
generate corrective movement of the spine with the
movement of the patient. In the long term, this will
reprogram the neuromuscular system and will be able
to slow or stop the curve progression and improve the
overall posture of the patient. Elastic resistance levels
are being controlled using a compact low powered
actuation mechanism which results in controlled
corrective forces being applied to torso.
The objective of the brace is to improve the spinal
alignment and pain relief by offloading the muscles,
nerve roots and joints of the spine. It will stabilize the
spine by reinstructing the movement patterns while
keeping the spine in the correct (de-rotated) posture.
Steady correction in spinal and postural alignment will
help to obviate the typical deterioration of posture and
progression of spinal degeneration disease.
Active dynamic brace treatment will provide in
pain relief and help in the postural correction in
adolescences. It will prevent the progression of cobb
Figure 1: Dynamic Active Soft Brace.
angle in adults with scoliosis and other spinal
deformities like kyphosis. It will provide effective
control over scoliosis while preserving the near-
normal movement. It will reduce the risk of muscle
atrophy observed in rigid braces. The dynamic active
brace will be able to provide specific localized control
of the spine and body posture, combined with curve
specific corrective movements.
2.2 Brace Design
In the proposed design shown in Figure 1, the
corrective bands are attached to a contoured body vest
which covers the end of the rib cage. It consists of
four 50 mm wide elastic bands which provide
thoracic rotation, shoulder rotation and left lateral
flexion. Firstly, the right thoracic flap (orange band)
is attached to the lower right corner of the vest and
wrap around the rib cage to finally attach to the pelvic
back of the body. This band provides thoracic rotation
in a counterclockwise direction and attached using
BIODEVICES 2021 - 14th International Conference on Biomedical Electronics and Devices
170
velcro crocodile strips. The tension in the band can be
adjusted to keep the spine at the correct posture. The
second flap (Tosca green band) is attached to the left
thoracic base. This flap wraps around the abdominal
part of the body and goes all the way to the right half
of pelvic back. Tension in this band is adjusted bit less
as compared to the orange flap to keep the spine
rotated in a counterclockwise direction. Third band
(purple flap) attached to the left shoulder, rotates
around the rib cage and back and finally attached in the
front of the pelvic belt. This band generates clockwise
shoulder rotation and left lateral flexion at T12. The
fourth band, the right shoulder flap generates clock-
wise shoulder rotation and clockwise shoulder tilt.
The tensions in the elastic bands are being
controlled using twisted string actuators. A Twisted
String Actuator (TSA) is a simple, cheap, portable
and compact mechanism and is an alternative to
conventional gear systems. In the TSA, a string that
is co-axially attached to the motor shaft acts as a high-
ratio gear, which yields the potential to generate high
output force with low input torque.
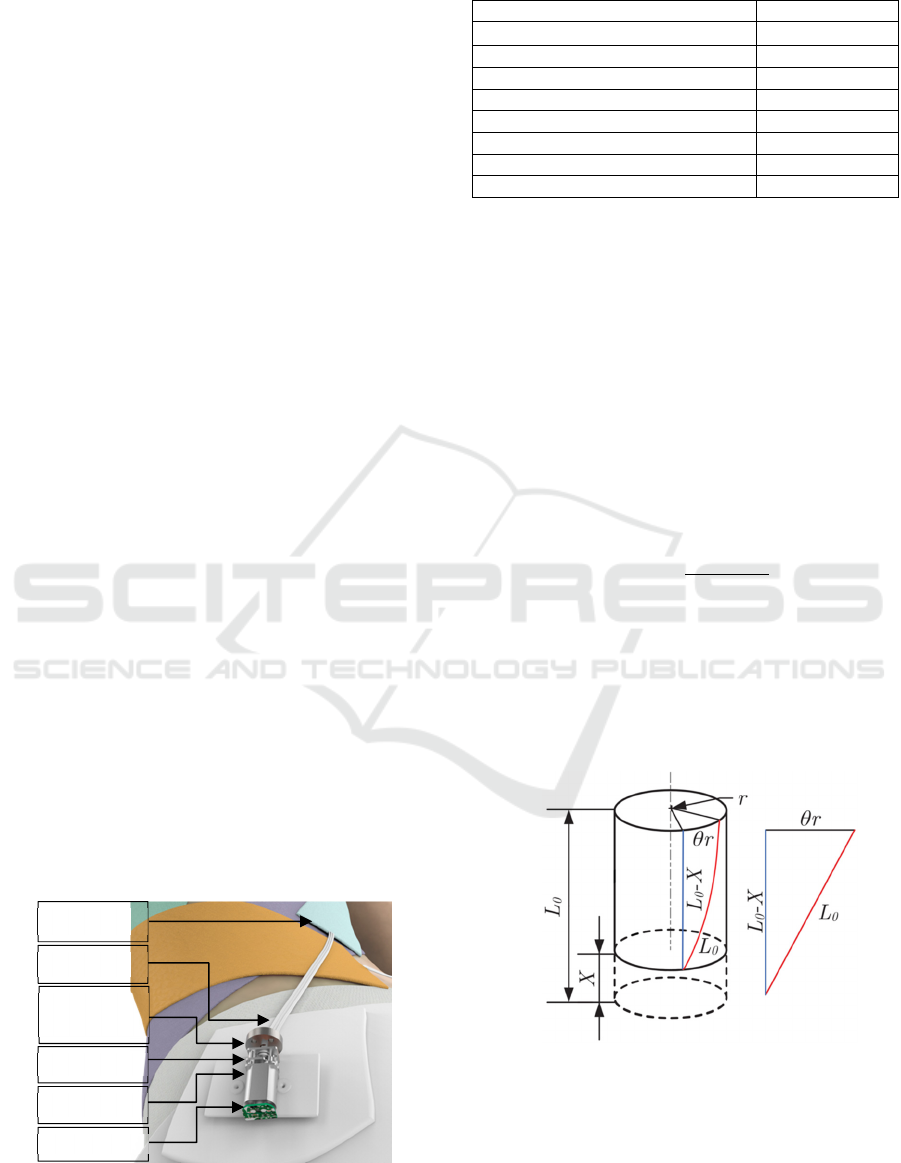
2.3 Actuation Mechanism
The dynamic active soft brace uses twisted string
actuators as an actuation mechanism. Actuation
module consists of Pololu Brushed DC gear motor
2386 with gear ratio 150:1, equipped with optical
encoders. DC gear motor shaft is attached to the 3mm
four-hole mounting hub, which twists the four
Dyneema fishing strings as shown in Figure 2.
Actuation module for a single TSA weighs
approximately 150 grams. Resulting in total device
weight nearly 1Kg including power. Which is
significantly less than the other braces. When a string
is attached to the motor and twisted it behaves like a
gear with non-linear transmission ratio. Table 1
describes the parameters of the twisted string
actuator.
Figure 2: Twisted String Actuator.
Table 1: TSA parameters.
Parameter Value
String Length (
L
o
)
200mm
String Radius (r) 0.725mm
Spring Constant of the band (K) 133 N/m
String Material Dyneema
Motor Output Power 1.2 Watt
Output power at max efficiency 0.68 W
No load Current 70 mA
Current at max efficiency 0.31 A
2.4 Device Actuation Modelling
To effectively control the twisted string actuation
mechanism, it is important to estimate the contraction
of the string length based on the rotation of the
actuator shaft. The shaft rotation θ can be measured
through optical encoder attached to the motor. A
conventional twisted string model can be derived
from the string’s helix geometry as shown in Figure 3
(Igor et al., 2021). The contraction of length X as a
function of twist angle θ as shown in Figure 3 can be
written as:
𝑟
𝜃
𝐿
𝑋
𝐿
0 (1)
𝑋𝐿
𝐿
𝑟
𝜃
(2)
Where L
o
is the original length of the string
bundle before twisting and r is the radius of string
bundle after 5 turns. According to the conventional
mathematical model of the TSA, a string of length L
0
twisted by a motor for an angle θ contracts by X
amount.
Figure 3: Schematic depiction of a section of a twisted
string.
2.5 Experimental Evaluation
To verify the actuation model of the brace, a setup
was designed consisting of Pololu DC gear motor
Encode
r
Moto
r
Gea
r
Mounting
Hub
String
Ban
d
Soft Active Dynamic Brace for Spinal Deformities
171
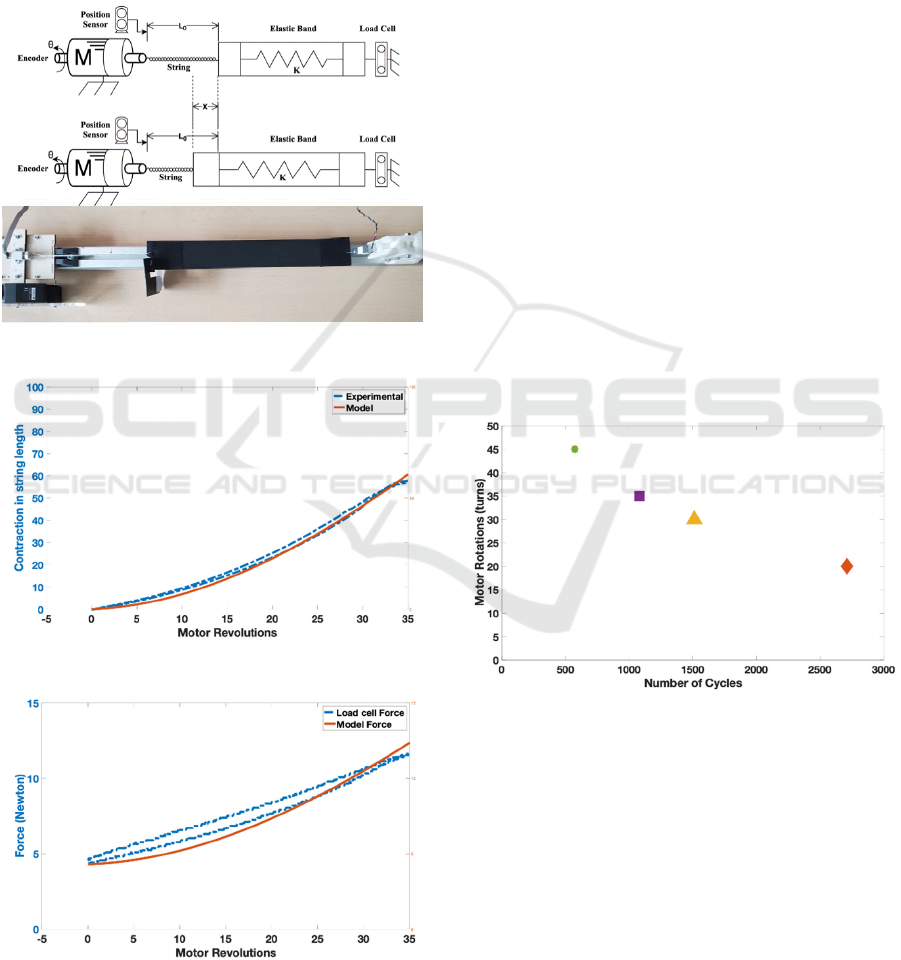
2386 with optical encoder and a gear ratio of 150:1 to
twist the four 0.4mm Dyneema fishing strings of 20
cm (200mm) attached to the motor shaft and elastic
band. A laser displacement sensor (keyence lk-g152)
and a load cell were used to measure the actual
position and pulling force of the string. The setup
configuration can be seen in Figure 4. The string
length contraction and the elastic resistance force
graphs can be seen in Figure 5 and Figure 6.
Figure 4: Actuation model verification setup.
Figure 5: String length contraction with shaft revolutions.
Figure 6: Force to control elastic resistance with respect to
the shaft rotation.
The model tracks the position effectively with the
RMSE of 0.17386 cm (1.7386mm). While the force
model shows the RMSE of 0.7242 N.
2.6 Life Cycle
Evaluating the life cycle of the string is one of the
important aspects of twisted string actuator. This
study evaluates the life cycle of the twisted string
actuator in different twisting regions. In the
experiment, the effect of the number of motor shaft
rotations per cycle on string behaviour is studied. The
cycle represents the twisting of the string for a
specific number of turns (20,30,35,45) and then it's
untwisting back to the original position.
The experimental setup consists of the DC gear
motor with an optical encoder attached to it, a current
sensor that measures the system current and motor
torque to report the system failure. A controller is
programmed to conduct the cycles. A short delay of a
few seconds is introduced after each cycle to reduce
the motor temperature. The data of the number of
turns and motor current is logged in the file with the
duration equals the experiment time. Thus, having a
record of the number of cycles of twisting that motor
endured by analysing the system failure point through
motor current.
Figure 7: Life cycle test for twisted string actuator.
Region up to 20turns represents the low
contraction region and have a higher life cycle of
2712. While the 35 turns cycle corresponds to the
starting of the overtwisting phase and represents the
maximum contraction limit without over twisting the
string with a cycle life of 1080. The 45 turns are the
limit where overtwisting is possible without
untwisting issues. It can be seen from Figure 7 that
the life cycles of the TSA reduce while going for the
high contraction of the string. Therefore, the active
dynamic brace operates below the overtwisting zone.
Motor Module
Displacement Sensor
Elastic Band
Load Cell
BIODEVICES 2021 - 14th International Conference on Biomedical Electronics and Devices
172

3 CONCLUSIONS
The dynamic active brace will preserve mobility and
effectively correct or stabilize the curve progression.
It will improve posture and body aesthetics. The
dynamic active brace will not cause muscle atrophy
as it will strengthen the muscles around the spine,
providing lasting results after the treatment.
The dynamic active brace will have certain
advantages over the rigid conventional braces. The
elastic nature of the bands will allow the greater
mobility and it will increase the physiotherapy
performance. It will be able to solve the issues of
stiffening of the spine and flat back problems. It has
a compact, light design and can be wearable under the
clothes, hence solving the socio implications.
Modular design and cheap motor mechanism of the
device solves the economic implications as well.
Rigid braces are not effective for obese patients.
In contrast to rigid braces, the dynamic active brace
can be a practical solution for obese patients as the
extra weight will not restrain the dynamic action of
the elastic flaps.
4 FUTURE WORK
In future, the focus of the research will be on the
validation of the device. The interface pressure
between the body and the elastic bands needs to be
measured using a body measurement system by
Tekscan® or similar. This will help to evaluate the
relation between the tension in bands and the amount
of force it is applying on the torso. The muscle
activation also needs to be measured using
electromyography sensor to validate the mobility of the
spinal muscles in comparison to the rigid brace. There
is a lot of potential in the improvement of twisted string
actuation technology such as working on self-sensing
supercoiled polymer twisted string actuation strings
(Zhang et al., 2020). The advance stretch(Vu et al.,
2019) to evaluate the motion of the spine and the
tactile(Sferrazza et al., 2019) sensors can be embedded
with elastic band to measure the stretch in the bands
which will be help full to measure the six-dimensional
stiffness of the torso. After the validation of device,
the goal is to go for the clinical trials of the device.
ACKNOWLEDGEMENTS
This project has received funding from the Italian
Ministry for Education, University, and Research
(MIUR) through the "Departments of Excellence"
program.
REFERENCES
Blount, W. P., Schmidt, A. C., KEEVER, E. D., & Leonard,
E. T. (1958). The Milwaukee brace in the operative
treatment of scoliosis. JBJS, 40(3), 511–525.
De Mauroy, J. C., Lecante, C., Barral, F., Daureu, D.,
Gualerzi, S., & Gagliano, R. (2008). The Lyon brace.
Disability and Rehabilitation: Assistive Technology.
https://doi.org/10.1080/17483100801904069
Emans, J. B., Kaelin, A., Bancel, P., Hall, J. E., & Miller,
M. E. (1986). The boston bracing system for idiopathic
scoliosis: Follow-up results in 295 patients. Spine.
https://doi.org/10.1097/00007632-198610000-00009
Grivas, T. B., de Mauroy, J. C., Wood, G., Rigo, M.,
Hresko, M. T., Kotwicki, T., & Negrini, S. (2018).
Brace classification study group (BCSG): part one-
definitions and atlas (Retraction of Vol 11, art no 43,
2016). Scoliosis and Spinal Disorders, 13.
Gutman, G., Benoit, M., Joncas, J., Beauséjour, M., Barchi,
S., Labelle, H., Parent, S., & Mac-Thiong, J. M. (2016).
The effectiveness of the SpineCor brace for the
conservative treatment of adolescent idiopathic
scoliosis. Comparison with the Boston brace. Spine
Journal. https://doi.org/10.1016/j.spinee.2016.01.020
Hopf, C., & Heine, J. (1985). Long-term results of the
conservative treatment of scoliosis using the Cheneau
brace. Zeitschrift Fur Orthopadie Und Ihre
Grenzgebiete, 123(3), 312–322.
Igor, G., Ryu, J. H., & Nedelchev, S. (2021). Twisted String
Actuation Systems: Applications, Modelling, and
Control. Elsevier Science. https://books.google.it/
books?id=MwttxAEACAAJ
Lee, C. S., Hwang, C. J., Kim, D. J., Kim, J. H., Kim, Y. T.,
Lee, M. Y., Yoon, S. J., & Lee, D. H. (2012).
Effectiveness of the Charleston night-time bending
brace in the treatment of adolescent idiopathic scoliosis.
Journal of Pediatric Orthopaedics. https://doi.org/
10.1097/BPO.0b013e3182561193
Lonstein, J. E., & Winter, R. B. (1994). The Milwaukee
brace for the treatment of adolescent idiopathic
scoliosis. A review of one thousand and twenty
patients. Journal of Bone and Joint Surgery - Series A.
https://doi.org/10.2106/00004623-199408000-00011
Morningstar, M. (2013). Outcome observations in patients
using a scoliosis activity suit: a retrospective chart
review after one-year follow-up. J Scoliosis Rehabil,
2013, 1–10. https://www.treatingscoliosis.com/images/
research/2013-1291_suit.pdf
Murray, R. C., Ophaswongse, C., Park, J. H., & Agrawal,
S. K. (2020). Characterizing Torso Stiffness in Female
Adolescents with and without Scoliosis. IEEE Robotics
and Automation Letters. https://doi.org/10.1109/
LRA.2020.2969945
Ogilvie, J. (2010). Adolescent idiopathic scoliosis and
genetic testing. In Current Opinion in Pediatrics.
Soft Active Dynamic Brace for Spinal Deformities
173

https://doi.org/10.1097/MOP.0b013e32833419ac
Park, J. H., Stegall, P. R., Roye, D. P., & Agrawal, S. K.
(2018). Robotic Spine Exoskeleton (RoSE):
Characterizing the 3-d stiffness of the human torso in
the treatment of spine deformity. IEEE Transactions on
Neural Systems and Rehabilitation Engineering.
https://doi.org/10.1109/TNSRE.2018.2821652
Périé, D., Aubin, C. E., Petit, Y., Beauséjour, M.,
Dansereau, J., & Labelle, H. (2003). Boston brace
correction in idiopathic scoliosis: A biomechanical
study. Spine. https://doi.org/10.1097/00007632-
200308010-00008
Rigo, M., & Weiss, H. R. (2008). The Chêneau concept of
bracing--biomechanical aspects. Studies in Health
Technology and Informatics.
Sferrazza, C., Wahlsten, A., Trueeb, C., & D’Andrea, R.
(2019). Ground Truth Force Distribution for Learning-
Based Tactile Sensing: A Finite Element Approach.
IEEE Access. https://doi.org/10.1109/ACCESS.2019.2
956882
Veldhuizen, A. G., Cheung, J., Bulthuis, G. J., &
Nijenbanning, G. (2002). A new orthotic device in the
non-operative treatment of idiopathic scoliosis.
Medical Engineering and Physics. https://doi.org/
10.1016/S1350-4533(02)00008-5
Vu, L. Q., Amick, R. Z., Kim, K. H., & Rajulu, S. L. (2019).
Evaluation of lumbar motion with fabric strain sensors:
A pilot study. International Journal of Industrial
Ergonomics.
https://doi.org/10.1016/j.ergon.2018.11.007
Wiemann, J. M., Shah, S. A., & Price, C. T. (2014).
Nighttime bracing versus observation for early
adolescent idiopathic scoliosis. Journal of Pediatric
Orthopaedics. https://doi.org/10.1097/BPO.000000000
0000221
Wong, M. S., Cheng, J. C. Y., Lam, T. P., Ng, B. K. W.,
Sin, S. W., Lee-Shum, S. L. F., Chow, D. H. K., & Tam,
S. Y. P. (2008). The effect of rigid versus flexible spinal
orthosis on the clinical efficacy and acceptance of the
patients with adolescent idiopathic scoliosis. Spine.
https://doi.org/10.1097/BRS.0b013e31817329d9
Zaina, F., De Mauroy, J. C., Grivas, T., Hresko, M. T.,
Kotwizki, T., Maruyama, T., Price, N., Rigo, M.,
Stikeleather, L., Wynne, J., & Negrini, S. (2014).
Bracing for scoliosis in 2014: State of the art. European
Journal of Physical and Rehabilitation Medicine.
Zhang, J., Bombara, D., Fowzer, S., & Brennan, C. (2020).
Compliant and Large-Strain Twisted String Actuators
using Supercoiled Polymers. 2020 3rd IEEE
International Conference on Soft Robotics, RoboSoft
2020. https://doi.org/10.1109/RoboSoft48309.2020.91
15985
BIODEVICES 2021 - 14th International Conference on Biomedical Electronics and Devices
174
