
Hybrid-S2S: Video Object Segmentation with Recurrent Networks and
Correspondence Matching
Fatemeh Azimi
1,2
, Stanislav Frolov
1,2
, Federico Raue
2
, J
¨
orn Hees
2
and Andreas Dengel
1,2
1
TU Kaiserslautern, Germany
2
DFKI GmbH, Germany
Keywords:
Video Object Segmentation, Recurrent Neural Networks, Correspondence Matching.
Abstract:
One-shot Video Object Segmentation (VOS) is the task of pixel-wise tracking an object of interest within a
video sequence, where the segmentation mask of the first frame is given at inference time. In recent years,
Recurrent Neural Networks (RNNs) have been widely used for VOS tasks, but they often suffer from limi-
tations such as drift and error propagation. In this work, we study an RNN-based architecture and address
some of these issues by proposing a hybrid sequence-to-sequence architecture named HS2S, utilizing a dual
mask propagation strategy that allows incorporating the information obtained from correspondence matching.
Our experiments show that augmenting the RNN with correspondence matching is a highly effective solution
to reduce the drift problem. The additional information helps the model to predict more accurate masks and
makes it robust against error propagation. We evaluate our HS2S model on the DAVIS2017 dataset as well as
Youtube-VOS. On the latter, we achieve an improvement of 11.2pp in the overall segmentation accuracy over
RNN-based state-of-the-art methods in VOS. We analyze our model’s behavior in challenging cases such as
occlusion and long sequences and show that our hybrid architecture significantly enhances the segmentation
quality in these difficult scenarios.
1 INTRODUCTION
One-shot Video Object Segmentation (VOS) aims to
segment an object of interest in a video sequence,
where the object mask in the first frame is provided.
The objective of this task is to track a target object in
a pixel-wise manner. It has various applications such
as robotics, autonomous driving, and video editing
to name a few. VOS is a challenging task, and gen-
erating quality segmentation masks requires address-
ing inevitable real-world difficulties such as uncon-
strained camera motion, occlusion, fast motion, and
motion blur as well as handling objects with different
sizes.
VOS has been extensively studied in the Computer
Vision community with several works based on clas-
sical techniques such as energy minimization and uti-
lizing superpixels (Chang et al., 2013; M
¨
arki et al.,
2016; Grundmann et al., 2010). However, learning-
based methods (Perazzi et al., 2017; Maninis et al.,
2018) have proved to be more successful by signifi-
cantly surpassing the traditional approaches.
Amongst the wide variety of the suggested
learning-based methods, some works approach the
problem by processing the frames independently and
learning an object model (Perazzi et al., 2017; Mani-
nis et al., 2018), while others utilize temporal infor-
mation (Xu et al., 2018; Ventura et al., 2019). Tok-
makov et al. (Tokmakov et al., 2017) propose utiliz-
ing optical flow to propagate the object mask through-
out the sequence and make use of the motion cues as
well as the spatial information. However, flow-based
models need an additional component for flow esti-
mation (Ilg et al., 2017), which is usually trained sep-
arately, and the performance of the whole system is
dependent on the accuracy of this module. With the
same motivation of using temporal data, (Xu et al.,
2018; Ventura et al., 2019; Azimi et al., 2020) utilize
Recurrent Neural Networks (RNNs) to track the target
object in a temporally consistent way. These models
are trained end-to-end and rely on learning the spatio-
temporal features to track the object and to propagate
the object mask across time. A disadvantage of this
category is the performance drop in longer sequences
caused by drift and error propagation in the RNN.
In this work, we study S2S (Xu et al., 2018), a
common RNN-based model for VOS due to the ef-
fectiveness of RNNs in utilizing the spatio-temporal
182
Azimi, F., Frolov, S., Raue, F., Hees, J. and Dengel, A.
Hybrid-S2S: Video Object Segmentation with Recurrent Networks and Correspondence Matching.
DOI: 10.5220/0010339401820192
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 4: VISAPP, pages
182-192
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

features and providing a motion model of the target
object, resulting in good segmentation accuracy. In-
spired by (Faktor and Irani, 2014; Wug Oh et al.,
2018; Yang et al., 2019), we propose a dual prop-
agation strategy by augmenting the spatio-temporal
features obtained from the RNN with correspondence
matching to reduce the impact of drift. Utilizing the
features obtained from similarity matching provides
a robust measurement for segmentation, improves the
segmentation quality, and reduces the error propaga-
tion. This aspect is especially beneficial for the model
in long sequences where the RNN performance de-
clines. Additionally, we integrate the first frame fea-
tures into the model throughout the whole sequence
as a reliable source of information (Ebert et al., 2017;
Wug Oh et al., 2018; Oh et al., 2019; Yang et al.,
2019). By employing these reference features, the
model can better handle challenging scenarios such as
occlusion (Ebert et al., 2017), since, by definition, the
object is present in the first frame. Figure 1 shows an
illustration of how correspondence matching together
with utilizing the first frame can be helpful in bet-
ter handling the occlusion. We hypothesize that the
RNN also plays a complementary role in correspon-
dence matching. Imagine a scenario where multiple
instances of similar objects are present in the scene;
in this case, the spatio-temporal model learned by the
RNN can act as a location prior and aid the model
to distinguish between the target object and the other
similar instances.
We evaluate our hybrid sequence-to-
sequence (HS2S) method on the Youtube-VOS (Xu
et al., 2018) and DAVIS2017 (Pont-Tuset et al., 2017)
datasets and demonstrate that our model significantly
improves the independent RNN-based models’
segmentation quality (Xu et al., 2018; Ventura et al.,
2019).
2 RELATED WORK
A large body of research in Computer Vision liter-
ature has studied VOS during the last decade. The
classical methods for solving VOS were mainly based
on energy minimization (Brox and Malik, 2010; Fak-
tor and Irani, 2014; Papazoglou and Ferrari, 2013;
Shankar Nagaraja et al., 2015). Brox et al. (Brox and
Malik, 2010) propose a model based on motion clus-
tering and segment the moving object via the analysis
of the point trajectories throughout the video. They
also use motion cues to distinguish foreground from
background. Faktor et al. (Faktor and Irani, 2014)
present a method based on consensus voting. They
extract the superpixels in each frame, and by comput-
t
saliency map at
t=0
t=0
t=30
t=15
t=70
t=75
Figure 1: This figure indicates how utilizing the first frame
as the reference can help the model recover from occlusion.
Here, the object of interest is a bear overlaid with the red
mask, which is absent from the middle row frames (from
t = 30 to t = 70). We observe that the model can detect the
animal after it appears again, and by looking at the saliency
map of the first frame, we note that the model has correctly
captured the correspondence between the bear in the first
frame and the frame right after the occlusion.
ing the similarity of the superpixel descriptors, then
use the nearest neighbor method to cluster the most
similar superpixels together in a segmentation mask.
(Jain and Grauman, 2014) addresses the problem of
fast motion and appearance change in the video by ex-
tending the idea of using superpixels to using super-
voxels (adding the time dimension) and taking into
account the long-range temporal connection during
the object movement.
Since the advent of Deep Learning (Krizhevsky
et al., 2012), the Computer Vision community has
witnessed a significant progress in the accuracy of
VOS methods (Maninis et al., 2018; Perazzi et al.,
2017; Tokmakov et al., 2017). The success of
learning based methods can largely be accounted to
progress made in learning algorithms (Krizhevsky
et al., 2012; He et al., 2016) and the availability of
large-scale VOS datasets such as Youtube-VOS (Xu
et al., 2018).
In one-shot VOS, there exist two training
schemes, namely offline and online training. Offline
training is the standard training phase in learning-
based techniques. As the segmentation mask of the
first object appearance is available at test time, on-
line training refers to further fine-tuning the model on
this mask with extensive data augmentation. This ad-
ditional step considerably improves the segmentation
quality at the expense of slower inference.
Hybrid-S2S: Video Object Segmentation with Recurrent Networks and Correspondence Matching
183

Considering offline training, one can divide the
proposed solutions into multiple categories. Some
methods focus on learning the object masks using
only the frame-wise data (Perazzi et al., 2017; Mani-
nis et al., 2018). In (Maninis et al., 2018), authors
extended a VGG-based architecture designed for reti-
nal image understanding (Maninis et al., 2016) for
VOS. They start with the pre-trained weights on Ima-
geNet (Deng et al., 2009), and then further train the
parent network on a specialized VOS dataset (Per-
azzi et al., 2016a). This model relies on online train-
ing and boundary snapping for achieving good per-
formance. (Voigtlaender and Leibe, 2017) further
improves this method by employing online adaption
to handle drastic changes in the object’s appearance.
Perazzi et al. (Perazzi et al., 2017) provide a solution
based on guided instance segmentation. They utilize a
DeepLab architecture (Chen et al., 2017) and modify
the network to accept the previous segmentation mask
as an additional input. Therefore, a rough guidance
signal is provided to the model to mark the approxi-
mate location where the object of interest lies. Yang et
al. (Yang et al., 2018) take a meta-learning approach
and train an additional modulator network that adjusts
the middle layers of a generic segmentation network
to capture the appearance of the target object.
In (Wug Oh et al., 2018) a Siamese architecture is
used to segment the object based on its similarity to
the mask template in the first frame. Similarly, (Yang
et al., 2019) proposes a zero-shot VOS model, where
the object mask at every time step is detected based
on the similarity of the current frame to the anchor
frames (first frame and the frame at t − 1). Following
this idea, (Johnander et al., 2019) suggests a gener-
ative approach for segmenting the target object, in-
troducing an appearance module to learn the proba-
bilistic model of the background and the foreground
object. In (Zhang et al., 2020), the authors develop a
model that propagates the segmentation mask based
on an affinity in the embedding space. They propose
to model the local dependencies via using motion and
spatial priors and the global dependencies based on
the visual appearance learned by a convolutional net-
work. Although these methods obtain good perfor-
mance on the standard benchmarks (Perazzi et al.,
2016a; Pont-Tuset et al., 2017), they do not utilize
temporal information and motion cues.
Another line of work relies on region proposal
techniques such as (He et al., 2017). For example,
(Luiten et al., 2018) takes a multi-step approach, in
which they first generate the region proposals and
then refine and merge promising regions to produce
the final mask. Furthermore, they use optical flow
to maintain the temporal consistency. In (Li et al.,
2017), an additional re-identification method based
on template-matching is used. This way, the model
can recapture objects lost at some point in the se-
quence. These methods are quite complex in archi-
tecture design and relatively slow at inference time.
A different group of methods focus on utilizing
a memory module to process motion and compute
spatio-temporal features. In order to obtain tempo-
rally consistent segmentation masks, (Xu et al., 2018;
Azimi et al., 2020; Tokmakov et al., 2017; Ventura
et al., 2019) employ a ConvLSTM (Xingjian et al.,
2015) (or ConvGRU) memory module while (Oh
et al., 2019) resorts to using an external memory to
process the space-time information.
In this work, we build on top of the S2S (Xu et al.,
2018) architecture, which is an RNN-based method,
on account of exploiting the spatio-temporal features,
good performance, and the simple architecture. We
study some of this model’s shortcomings stemming
from the finite memory and error propagation in
RNNs. To address these limitations, we propose a
hybrid design that combines the spatio-temporal fea-
tures from the RNN with similarity matching infor-
mation. Unlike (Oh et al., 2019), our model does not
require any form of external memory. This is advan-
tageous since using external memory results in addi-
tional constraints in the inference phase (e.g. memory
overflow for long video sequences).
3 METHOD
In this section, we explain our hybrid architecture for
VOS. We build on top of the S2S model (Xu et al.,
2018), which is an RNN-based architecture and em-
ploy a dual mask propagation strategy that utilizes
the spatio-temporal features from the RNN as well as
correspondence matching to propagate the mask from
time step t − 1 to t. Moreover, we integrate the fea-
tures from the first frame as a reference throughout
the sequence.
The S2S model is composed of an encoder-
decoder architecture with a memory module in the
bottleneck to memorize the target object and obtain
temporal consistency in the predicted segmentation
masks. The overall design of this method is illustrated
in Figure 2. In this model, the object masks are com-
puted as in (Xu et al., 2018):
h
0
,c
0
= Initializer(x
0
,y
0
) (1)
˜x
t
= Encoder(x
t
) (2)
h
t
,c
t
= RNN( ˜x
t
,h
t−1
,c
t−1
) (3)
ˆy
t
= Decoder(h
t
) (4)
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
184

where x and y refer to the RGB input image and the
binary mask of the target object in the first frame.
One of the main limitations of RNN-based mod-
els, such as S2S, is the fixed-sized memory, which
can be insufficient to capture the whole sequence
and long-term dependencies (Bahdanau et al., 2014).
Therefore, as the sequence length grows, access to
information from earlier time steps decreases. This
issue, together with the vanishing gradient problem,
adversely impacts the segmentation quality in longer
sequences. This problem is especially critical in se-
quences with occlusion, where the object of interest
can be absent for an extended period.
Another obstacle with this category of approaches
is drift and error propagation. Due to the recurrent
connection, the model output is fed back to the net-
work; as a result, the prediction error propagates to
the future, and erroneous model predictions affect the
performance for future time steps. This issue is an-
other contributing factor to the performance drop in
later frames.
Hybrid Mask Propagation. Based on the challenges
in the RNN-based models, we propose a hybrid ar-
chitecture, combining the RNN output with informa-
tion derived from correspondence matching. In our
model, the segmentation mask is predicted using the
location prior obtained from the RNN, as well as sim-
ilarity matching between the video frames at t − 1
and t. Our intuition is that the merits of using the
spatio-temporal model from RNN-based models and
the matching-based methods are complementary. In
situations where multiple similar objects are present
in the scene, the matching-based approaches struggle
to distinguish between the different instances. Hence,
the location prior provided by the spatio-temporal fea-
tures from the RNN can resolve this ambiguity. More-
over, the information obtained from similarity match-
ing provides a reliable measurement for propagating
the segmentation mask to the next time step (as in-
vestigated in (Yang et al., 2019) for zero-shot VOS).
Using this additional data helps the model reduce
the prediction error, improving the drift problem, and
obtaining better segmentation quality for longer se-
quences.
To encode the frame at t − 1, we redefine the ini-
tializer network’s task in S2S to a reference encoder
(as shown in Figure 2), initializing the hidden states
of the RNN module with zeros. In our experiments,
we observed that the initializer network does not play
a crucial role, and it is possible to replace it with zero-
initialization with little change in the performance.
To perform the similarity matching between the
RNN hidden state (h
t
) and the reference encoder’s
output features, one can use different techniques such
as using the cosine distance between the feature vec-
tors. Here, we follow the design in (Wug Oh et al.,
2018) and use a Global Convolution (Peng et al.,
2017) to accomplish the task (merge layer in Fig-
ure 2). Global Convolution (GC) approximates a large
kernel convolution layer efficiently with less number
of parameters. The large kernel size is essential to
model both the local connections (as required for lo-
calization) and the dense global connections required
for accurate classification (foreground, background).
This way, the model directly accesses the features
from time steps 0 and t − 1. We note that this op-
eration can also be interpreted as self-attention; as,
the features at the current time step, which share a
higher similarity to the object features from the refer-
ence frames, get a higher weight via the convolution
operation in the merge layer.
As shown in Figure 2, we do not use weight shar-
ing between the Reference Encoder and the Encoder,
as we observed a considerable performance drop in
doing so. We believe the underlying reason is that
the functions approximated by these two modules are
different; the inputs to the Reference Encoder are
aligned in time while the inputs to the Encoder are
not. We highlight that compared to S2S (Xu et al.,
2018), the only added element is the light-weight
Merge Layer (Figure 2). The rest of the components
remain unchanged, by modifying the task of the Ini-
tializer Network to Reference Encoder.
Attention to the First Frame. As suggested in (Ebert
et al., 2017) for the Video Prediction task, the first
frame of the sequence is of significant importance as
it contains the reference information which can be uti-
lized for recovering from occlusion. We note that
by definition, the target object is present in the first
frame. By computing the correspondences between
the object appearance after occlusion and in the first
frame, the model is able to re-detect the target. Ad-
ditionally, (Yang et al., 2019; Wug Oh et al., 2018)
demonstrate the effectiveness of using the first frame
as an anchor or reference frame. In (Wug Oh et al.,
2018), the authors propose a Siamese architecture that
learns to segment the object of interest by finding the
feature correspondences between the target object in
the first frame and the current frame. Although this
model’s performance suffers in scenarios with drastic
appearance change, it reveals the importance of rig-
orously using the data in the first frame. We use the
same reference encoder and merge layer for integrat-
ing the first frame features. We hypothesize that this
modification can be considered as an attention mech-
anism (Bahdanau et al., 2014), where the attention
span is limited to the first frame. Using attention is a
standard solution to address this finite memory in the
Hybrid-S2S: Video Object Segmentation with Recurrent Networks and Correspondence Matching
185
Encoder
Decoder
Initializer Encoder
Decoder
RNN
Reference
Encoder
Merge
Layer
Reference
Encoder
RNN
S2S HS2S
Weight Sharing
ConvLSTM
Merge Layer
RNN
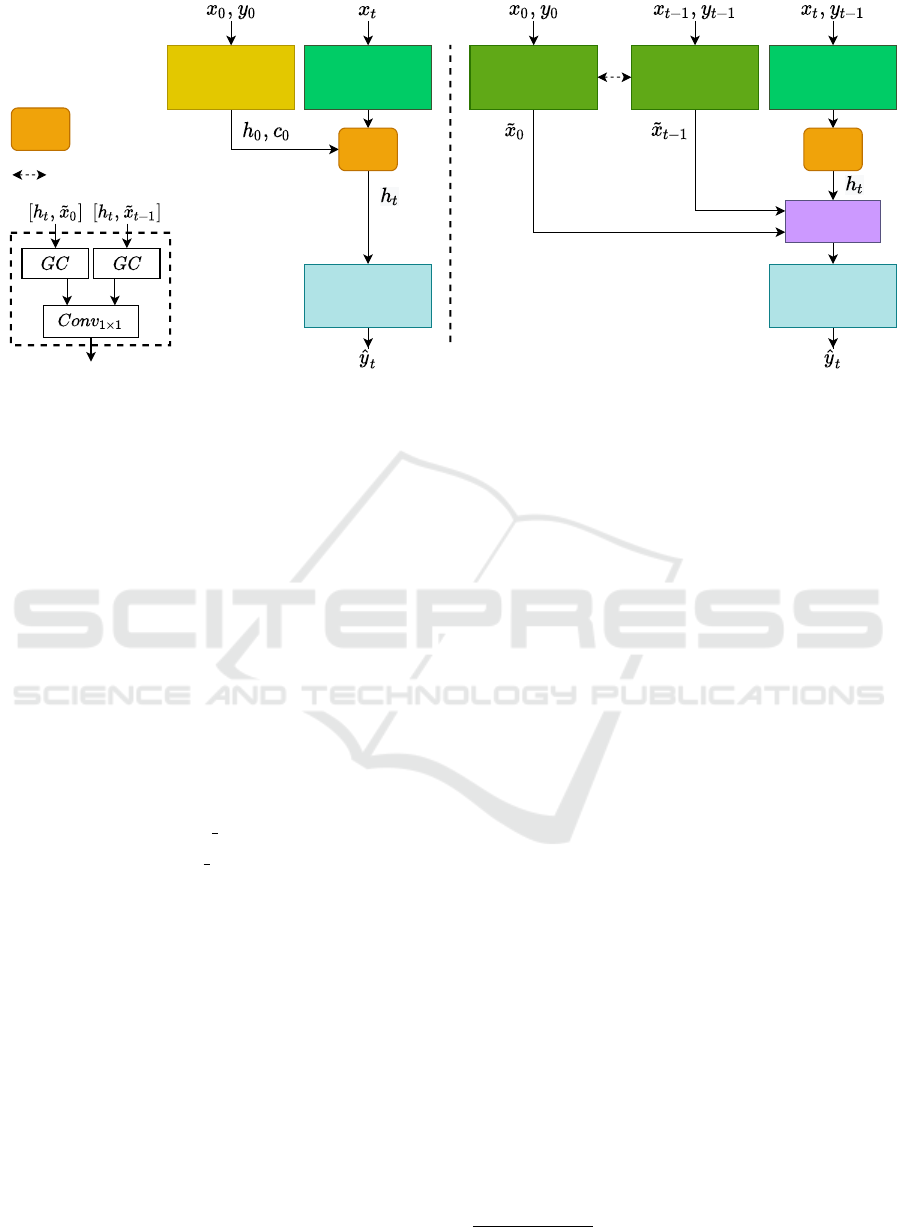
Figure 2: In this figure, we depict the overall architecture of S2S (Xu et al., 2018) (Equations (1) to (4)) and our HS2S
method (equations (5) to (10)). In HS2S, we initialize the RNN hidden states (h
0
and c
0
) with zeros, instead of using the
initializer network. We keep track of the target object by feeding the previous segmentation mask (y
t−1
) to the encoder as an
additional input channel, similar to (Perazzi et al., 2017). Furthermore, we use a separate reference encoder to process the
input to the matching branch. We highlight that the functions approximated by these two encoders differ, as the inputs to the
Reference Encoder are aligned in time, but this is not the case for the Encoder network. Finally, the hidden state of the RNN
(h
t
) is combined with the encoded features from the matching branch via a merge layer and passed to the decoder to predict
the segmentation mask. The skip connections between the encoder and the decoder networks are not shown for simplicity.
RNNs, by providing additional context to the mem-
ory module. The context vector is usually generated
from a weighted combination of the embeddings from
all the time steps. However, in high-dimensional data
such as video, it would be computationally demand-
ing to store the features and compute all the frames’
attention weights.
The resulting architecture is shown in Figure 2 and
can be formulated as:
h
0
,c
0
= 0
0
0 (5)
˜x
0
= Reference Encoder(x
0
,y
0
) (6)
˜x
t−1
= Reference Encoder(x
t−1
,y
t−1
) (7)
˜x
t
= Encoder(x
t
,y
t−1
) (8)
h
t
,c
t
= RNN( ˜x
t
,h
t−1
,c
t−1
) (9)
ˆy = Decoder( ˜x
0
, ˜x
t−1
,h) (10)
where x and y are the RGB image and the binary seg-
mentation mask, and 0
0
0 ∈ R
d
with d as the feature di-
mension. Here the merge layer is considered as part
of the decoder.
Training Objective. For the loss function, we utilize
a linear combination of the balanced Binary Cross-
Entropy (BCE) loss and an auxiliary loss (Azimi
et al., 2020):
L
total
= λ L
seg
+ (1 − λ) L
aux
(11)
The auxiliary task employed here is border classifica-
tion. For this task, a border class is assigned to each
pixel based on its location with respect to the object
boundary, where the boundary target classes are as-
signed based on a distance transform (Hayder et al.,
2017). This term provides fine-grained location infor-
mation for each pixel resulting in improved bound-
ary detection F-score. For more details, please refer
to (Azimi et al., 2020).
The balanced BCE loss is computed as in (Caelles
et al., 2017) :
L
seg
(W) =
T
∑
t=1
(−β
∑
j∈Y
+
logP(y
j
= 1|X; W)
− (1 − β)
∑
j∈Y
−
logP(y
j
= 0|X; W))
(12)
with X as input, W as the model parameters, Y
+
and Y
−
standing for the foreground and background
groundtruth labels, β = |Y
−
|/|Y |, and |Y | = |Y
−
| +
|Y
+
|. This loss addresses the data imbalance between
the foreground and the background classes by the
weighting factors β.
4 IMPLEMENTATION DETAILS
In this section, we explain the implementation details
of our hybrid model. The code and the pre-trained
models are publicly available
1
.
1
https://github.com/fatemehazimi990/HS2S
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
186

4.1 Encoder Networks
In the S2S model, a VGG network (Simonyan and
Zisserman, 2014) is used as the backbone for the ini-
tializer and encoder networks. In this work, we uti-
lize a ResNet50 (He et al., 2016) architecture, pre-
trained on ImageNet (Deng et al., 2009). We remove
the last average pooling and the fully connected lay-
ers, which are specific for image classification. Fur-
thermore, we add an extra 1 × 1 convolution layer to
reduce the number of output channels from 2048 to
1024. The number of input channels is altered to 4,
as we feed the RGB image and the binary segmen-
tation mask to the encoder. We utilize skip connec-
tions (Ronneberger et al., 2015) between the encoder
and the decoder at every spatial resolution of the fea-
ture map (5 levels in total) to capture the fine de-
tails lost in the pooling operations and reducing the
spatial size of the feature map. Moreover, we use
an additional RNN module in the first skip connec-
tion, as suggested in (Azimi et al., 2020). The impact
of changing the backbone network in the S2S model
from VGG to ResNet on the segmentation accuracy is
studied in Table 5.
4.2 RNN and Merge Layer
For the RNN component, we use a ConvLSTM
layer (Xingjian et al., 2015), with a kernel-size of
3 × 3 and 1024 filters. As suggested in (Xu et al.,
2018), Sigmoid and ReLU activations are used for the
gate and state outputs, respectively.
The merging layer’s role is to perform correspon-
dence matching between the RNN hidden state (the
spatio-temporal features) and the outputs from the ref-
erence encoder. There are different ways that can be
used for this layer based on similarity matching and
cosine distance. Similar to (Wug Oh et al., 2018), we
utilize Global Convolution (GC) layers (Peng et al.,
2017) for this function. Two GC layers with an effec-
tive kernel size of 7 × 7 are employed to combine the
RNN hidden state with the reference features and the
features from the previous time step ( ˜x
0
and ˜x
t−1
as in
Equations (6) and (7)). The output of these two layers
are then merged using a 1 × 1 convolution and then
fed into the decoder network.
4.3 Decoder
The decoder network consists of five up-sampling lay-
ers followed by 5 × 5 convolution layers with 512,
256, 128, 64, and 64 number of filters, respectively.
In the last layer, a Conv
1×1
maps the 64 channels to
1 and a Sigmoid activation is used to generate the
binary segmentation scores (for the foreground and
background classes). The features from the skip con-
nections are merged into the decoder using a 1 × 1
convolution layers. ReLU activation is used after each
convolution layer, except for the last layer, where we
use Sigmoid activation to generate the segmentation
output.
4.4 Training Details
For data augmentation, we apply random horizon-
tal flipping as well as affine transformations. The
λ in Equation 11 is set to 0.8. We use Adam opti-
mizer (Kingma and Ba, 2014) with an initial learning
rate of 10
−4
. We gradually lower the learning rate
in the final phase of training when the loss is stable.
During the training, we use video snippets with 5 to
10 frames and a batch size of 16.
Additionally, we apply a curriculum learn-
ing method as suggested for sequence prediction
tasks (Bengio et al., 2015). To this end, we use
the ground-truth for the segmentation mask input in
the earlier stages of training where the model out-
put is not yet satisfactory. This phase is known as
teacher forcing. Next, with a pre-defined proba-
bilistic scheme (Bengio et al., 2015), we randomly
choose between using the ground-truth or the model-
generated segmentation mask, on a per-frame basis.
This process helps to close the gap between the train-
ing and inference data distributions (during the infer-
ence, only the model-generated masks are used).
5 EXPERIMENTS
This section provides the experimental results for our
hybrid model and a comparison with other state-of-
the-art methods. Additionally, we analyze our hybrid
model’s behavior on the two challenging scenarios
occlusion and long sequences.
5.1 Evaluation on Youtube-VOS and
DAVIS2017
We evaluate our model on the Youtube-VOS (Xu
et al., 2018) dataset (the largest for Video Object Seg-
mentation), as well as the DAVIS2017 dataset (Pont-
Tuset et al., 2017).
We report the standard metrics of the task,
namely Region Similarity and Boundary Accuracy
(F&J) (Perazzi et al., 2016b). The F score measures
the quality of the estimated segmentation boundaries
and the Jaccard index J measures the intersection over
Hybrid-S2S: Video Object Segmentation with Recurrent Networks and Correspondence Matching
187
union area between the model output and the ground-
truth segmentation mask.
Table 1 shows a comparison of our model with
other state-of-the-art methods. The upper and lower
sections include the methods with and without online
training. During the online training, the model is fur-
ther fine-tuned on the first frame (where the segmen-
tation mask is available) at test time; Although this
stage significantly improves the segmentation accu-
racy, it results in slow inference which is not prac-
tical for real-time applications. Despite this, we see
that our model without online training still outper-
forms the S2S model with online training. The per-
formance improvement compared to RGMP (Wug Oh
et al., 2018) (matching-based) and S2S (Xu et al.,
2018) (RNN-based) models strongly indicates that
both propagation and matching information are re-
quired for better segmentation quality. Moreover, our
method achieves similar performance to STM (Oh
et al., 2019) when training on the same amount of
data (not using synthetic data generated from image
segmentation datasets) without relying on an exter-
nal memory module; Therefore, our model is less
memory-constrained during the inference stage com-
pared to methods using external memory that are
prone to memory overflow for longer sequences (in
(Oh et al., 2019), authors save every 5th frame to the
memory to avoid the GPU memory overflow during
the test phase).
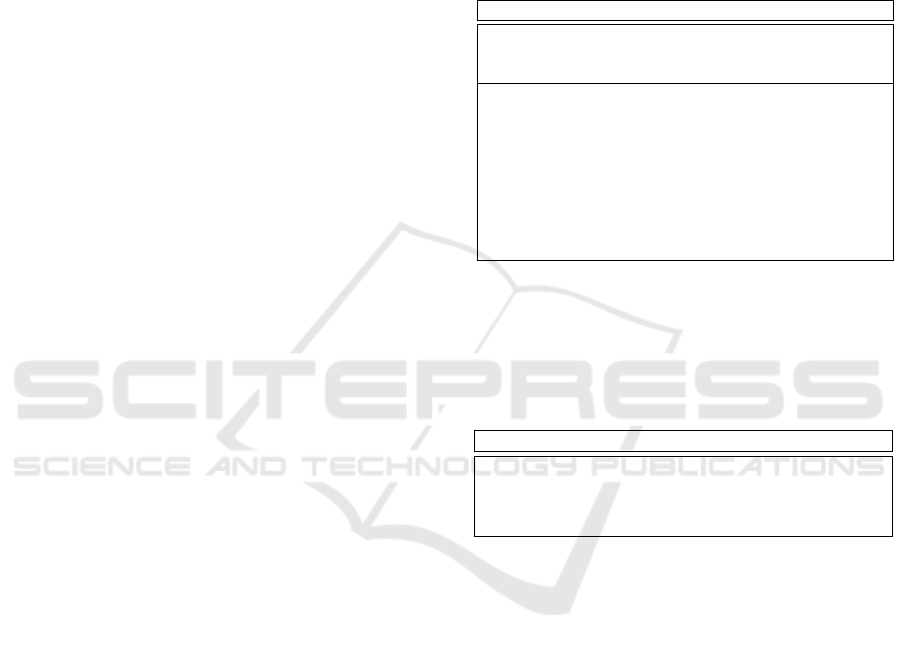
Figure 3 illustrates some visual examples from
our model. As we see, our model can properly track
the target object in the presence of similar object in-
stances as well as occlusion. More visual samples are
provided in the supplementary material.
To assess the generalization of our model after
training on Youtube-VOS, we freeze the weights and
evaluate the model on DAVIS2017 dataset (Pont-
Tuset et al., 2017). The results can be seen in Table 2.
We observe that our hybrid model outperforms the in-
dependent RNN-based and matching-based methods,
even without fine-tuning on this dataset.
5.2 Analysis of Sequence Length and
Occlusion
To quantitatively assess our model’s effectiveness, we
evaluate it in challenging scenarios such as occlu-
sion and longer sequences. As the validation set of
the Youtube-VOS dataset is not released, we use the
80:20-splits of the training set from (Ventura et al.,
2019) for training and evaluation. For the S2S model
results, we further used our re-implementation as the
code for their work is not publicly available. Further-
more, we use the ResNet50 architecture as backbone
Table 1: A comparison with the state-of-the-art methods on
the Youtube-VOS dataset (Xu et al., 2018). The upper part
of the table shows models with online training, the lower
part without. All scores are in percent. RVOS, S2S, and
S2S++ are the RNN-based architectures. As shown in this
table, our hybrid model outperforms the S2S(no-OL) base-
line model with an average improvement of 11.2 pp. STM-
refers to results in (Oh et al., 2019), with the same amount
of training data for a fair comparison. We can see that our
method can achieve similar results to STM-, without requir-
ing an external memory module.
Method J F F&J
OSVOS (Maninis et al., 2018) 57.0 60.6 58.8
MaskTrack (Perazzi et al., 2017) 52.5 53.7 50.6
S2S(OL) (Xu et al., 2018) 63.25 65.6 64.4
OSMN (Yang et al., 2018) 50.3 52.1 51.2
RGMP (Wug Oh et al., 2018) 52.4 55.3 53.8
RVOS (Ventura et al., 2019) 54.6 59.1 56.8
A-GAME (Johnander et al., 2019) 64.3 67.9 66.1
S2S(no-OL) (Xu et al., 2018) 57.5 57.9 57.7
S2S++ (Azimi et al., 2020) 58.8 63.2 61.0
STM- (Oh et al., 2019) - - 68.2
TVOS (Zhang et al., 2020) 65.4 70.5 67.2
HS2S (ours) 66.1 71.7 68.9
Table 2: A comparison between the independent RNN-
based (RVOS) and matching-based (RGMP) models and
our hybrid method on the DAVIS2017 dataset (Pont-Tuset
et al., 2017) (test-val). HS2S- shows the results of our
model trained on Youtube-VOS without fine-tuning on
DAVIS2017. The results of the S2S model on DAVIS2017
were not available.
Method J F F&J
S2S (Xu et al., 2018) - - -
RVOS (Ventura et al., 2019) 52.7 58.1 55.4
RGMP (Wug Oh et al., 2018) 58.1 61.5 8 59.8
HS2S- (ours) 58.9 63.4 61.1
for both models for a fair comparison (to our disad-
vantage, as it improves the overall evaluation score of
57.3% for S2S (as reported in (Xu et al., 2018)) to
60% for our re-implementation S2S*).
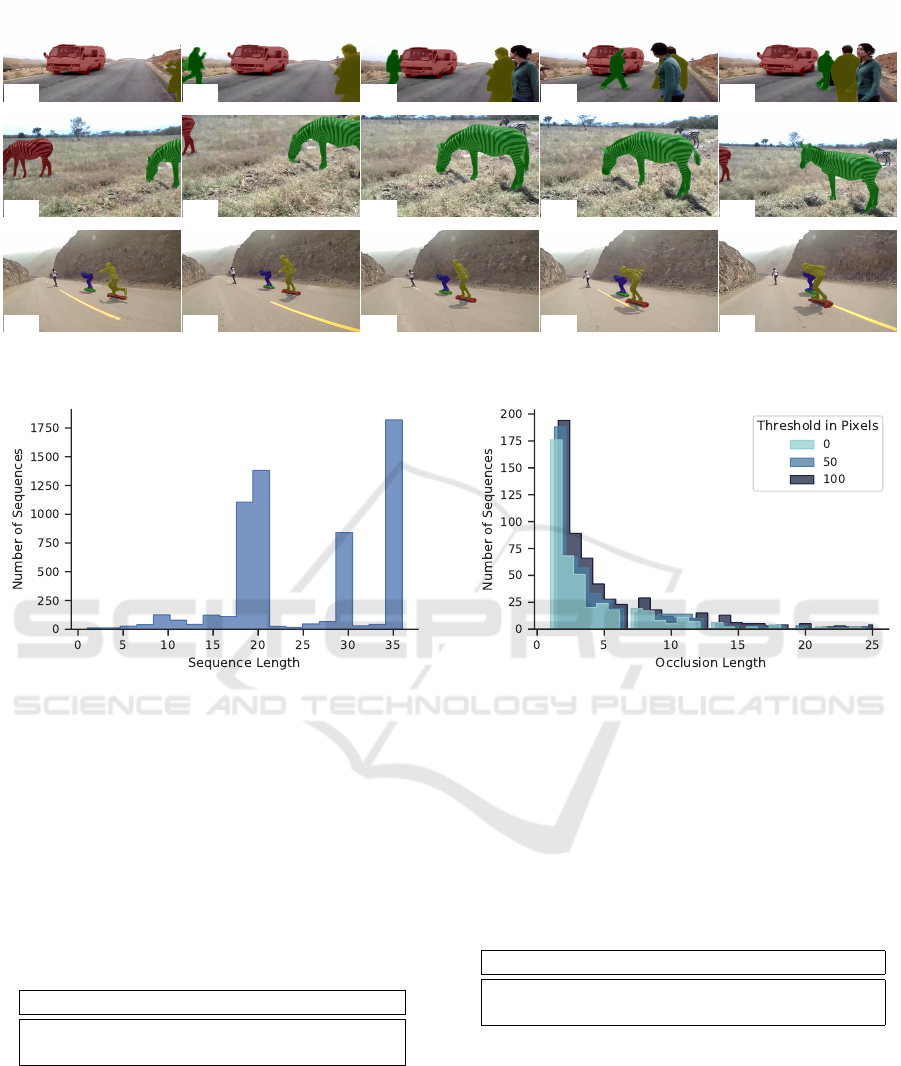
Figure 4 shows the sequence length distribution of
the Youtube-VOS training set (one sequence per ob-
ject in each video). As can be seen, the length varies
between 1 to about 35 frames in a very non-uniform
fashion. To study the impact of the video length on the
segmentation scores, we pick the sequences longer
than 20 frames and measure the scores for frames
with t < 10 (considered as early frames) and frames
with t > 20 (considered as late frames), separately.
As presented in Table 3, we observe that the hybrid
model improves the late frame accuracy significantly
and reduces the performance gap between the early
and late frames. This observation confirms the effec-
tiveness of the hybrid path for utilizing the informa-
tion from spatio-temporal features as well as the cor-
respondence matching.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
188
t=0 t=20 t=40 t=60 t=80
t=0 t=20 t=40 t=60 t=80
t=0 t=15 t=30 t=45 t=60
Figure 3: Visual samples of our model on Youtube-VOS validation set. As can be observed, our method can successfully
segment sequences with similar object instances, even in the presence of occlusion.
Figure 4: Distribution of the sequence length (per object)
in the Youtube-VOS dataset. In Youtube-VOS, the video
frame rate is reduced to 30 fps, and the annotations are pro-
vided every fifth frame (6 fps). Therefore, a sequence with
36 labeled frames spans 180 time steps in the original frame
rate.
Table 3: A study on the impact of sequence length on the
segmentation accuracy. For this experiment, we picked the
video sequences with more than 20 frames. Then we com-
pute the F and J scores for frames earlier (t < 10) and later
(t > 20) in the sequence. As the results show, there is a
performance drop as the time step increases. However, our
hybrid model’s performance drops a lot less than the base-
line’s.
Method F
l<10
J
l<10
F
l>20
J
l>20
S2S* 74.4 73.7 54.5 54.6
HS2S (ours) 77.1 76.3 65.5 64.2
The histogram in Figure 5 shows the number of se-
quences with occlusion in Youtube-VOS training set.
Each bin in the histogram shows the occlusion dura-
tion, and the y axis indicates the number of sequences
that belong to each bin. As can be seen from this plot,
the occlusion duration varies between 1 to 25 frames.
To study our model’s effectiveness in handling occlu-
sion, we report the scores for frames appearing after
Figure 5: The number of occluded sequences (per object)
in Youtube-VOS train set, for different occlusion lengths
and with three occlusion thresholds (shifted by 1/3 for better
visibility).
Table 4: A study on the impact of occlusion on the seg-
mentation quality. The scores presented in this table are the
average of F and J scores in percentages, when considering
different thresholds (in pixels) for occlusion. The avg score
refers to the average result for all the sequences in the 20-
split. For the other columns, we only considered the frames
after ending the first occlusion period (when the target ob-
ject re-appears in the scene).
Method avg th : 0 th : 50 th : 100
S2S* 63.3 33.6 30.8 33.1
HS2S (ours) 69.0 40.2 39.3 47.7
a first occlusion in Table 4. An occlusion is consid-
ered a scenario where the object leaves the scene en-
tirely and re-appears again. As the areas below 100
pixels are almost not visible (and could be consid-
ered as labeling noise), we also consider occlusions
at three different thresholds of 0, 50, and 100 pixels.
As we can see in the table, occlusion is a challeng-
ing scenario with significantly lower scores than the
average sequence scores. However, our proposed ap-
Hybrid-S2S: Video Object Segmentation with Recurrent Networks and Correspondence Matching
189

Table 5: An ablation study on the impact of different com-
ponents in our model. S2S* is our re-implementation of
the S2S method with the same backbone as our model, for
a fair comparison (this version achieves a better segmenta-
tion accuracy). S2S
0
refers to our model without the hybrid
propagation, only using the first frame as reference. S2S
t−1
is our model with hybrid propagation and without utiliz-
ing the first frame. In HS2S
sim
, we implemented the merge
layer (Figure 2) using cosine similarity instead of Global
Convolution.
Method J F F&J
S2S (Xu et al., 2018) 57.5 57.9 57.7
S2S* 59.1 63.7 61.4
HS2S
0
64.0 68.95 66.5
HS2S
t−1
63.6 68.7 66.2
HS2S 66.1 71.7 68.9
HS2S
sim
64.35 69.35 66.9
proach again succeeds in defending its considerable
improvement over the S2S baseline.
6 ABLATION STUDY
In this section, we present an ablation study on the
impact of different components of our model. In addi-
tion, we provide the results for a variant of our model
where we use cosine similarity (Wang et al., 2018)
for the merge layer instead of global convolution (re-
ferred to as HS2S
sim
).
Table 5 presents the segmentation scores when
different components in our model are added one at
a time. The results for S2S* are obtained from our
re-implementation of the S2S model with ResNet50
backbone. As it can be seen from the results, utiliz-
ing the first frame as the reference (HS2S
0
) and using
the hybrid match-propagate strategy (HS2S
t−1
) both
improve the segmentation quality. Moreover, the en-
hancements add up when they are integrated into a
single model (HS2S).
7 CONCLUSION
In this work, we presented a hybrid architecture
for the task of one-shot Video Object Segmenta-
tion. To this end, we combined the merits of RNN-
based approaches and models based on correspon-
dence matching. We showed that the advantages of
these two categories are complementary, and can as-
sist each other in challenging scenarios. Our experi-
ments demonstrate that both mechanisms are required
for obtaining better segmentation quality.
Furthermore, we provided an analysis of two chal-
lenging scenarios: occlusion and longer sequences.
We observed that our hybrid model achieves a sig-
nificant improvement in robustness compared to the
baselines that rely on RNNs (Xu et al., 2018) and ref-
erence guidance (Wug Oh et al., 2018). However, oc-
clusion remains an open challenge for future inves-
tigation, as the performance in this scenario is con-
siderably lower than the average. Moreover, we be-
lieve that integrating global information and model-
ing the interactions between the objects in the scene
is a promising direction for future work.
ACKNOWLEDGMENTS
This work was supported by the TU Kaiserslautern
CS PhD scholarship program, the BMBF project
ExplAINN (01IS19074), and the NVIDIA AI Lab
(NVAIL) program. Further, we thank all members of
the Deep Learning Competence Center at the DFKI
for their feedback and support.
REFERENCES
Azimi, F., Bischke, B., Palacio, S., Raue, F., Hees, J., and
Dengel, A. (2020). Revisiting sequence-to-sequence
video object segmentation with multi-task loss and
skip-memory. arXiv preprint arXiv:2004.12170.
Bahdanau, D., Cho, K., and Bengio, Y. (2014). Neural ma-
chine translation by jointly learning to align and trans-
late. arXiv preprint arXiv:1409.0473.
Bengio, S., Vinyals, O., Jaitly, N., and Shazeer, N. (2015).
Scheduled sampling for sequence prediction with re-
current neural networks. In Advances in Neural Infor-
mation Processing Systems, pages 1171–1179.
Brox, T. and Malik, J. (2010). Object segmentation by long
term analysis of point trajectories. In European con-
ference on computer vision, pages 282–295. Springer.
Caelles, S., Maninis, K.-K., Pont-Tuset, J., Leal-Taix
´
e, L.,
Cremers, D., and Van Gool, L. (2017). One-shot video
object segmentation. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 221–230.
Chang, J., Wei, D., and Fisher, J. W. (2013). A video repre-
sentation using temporal superpixels. In Proceedings
of the IEEE Conference on Computer Vision and Pat-
tern Recognition, pages 2051–2058.
Chen, L.-C., Papandreou, G., Kokkinos, I., Murphy, K., and
Yuille, A. L. (2017). Deeplab: Semantic image seg-
mentation with deep convolutional nets, atrous convo-
lution, and fully connected crfs. IEEE transactions on
pattern analysis and machine intelligence, 40(4):834–
848.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
190

puter vision and pattern recognition, pages 248–255.
Ieee.
Ebert, F., Finn, C., Lee, A. X., and Levine, S. (2017). Self-
supervised visual planning with temporal skip connec-
tions. arXiv preprint arXiv:1710.05268.
Faktor, A. and Irani, M. (2014). Video segmentation by
non-local consensus voting. In BMVC, page 8.
Grundmann, M., Kwatra, V., Han, M., and Essa, I. (2010).
Efficient hierarchical graph-based video segmenta-
tion. In 2010 ieee computer society conference on
computer vision and pattern recognition, pages 2141–
2148. IEEE.
Hayder, Z., He, X., and Salzmann, M. (2017). Boundary-
aware instance segmentation. In Proceedings of the
IEEE Conference on Computer Vision and Pattern
Recognition, pages 5696–5704.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Ilg, E., Mayer, N., Saikia, T., Keuper, M., Dosovitskiy, A.,
and Brox, T. (2017). Flownet 2.0: Evolution of optical
flow estimation with deep networks. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 2462–2470.
Jain, S. D. and Grauman, K. (2014). Supervoxel-consistent
foreground propagation in video. In European confer-
ence on computer vision, pages 656–671. Springer.
Johnander, J., Danelljan, M., Brissman, E., Khan, F. S., and
Felsberg, M. (2019). A generative appearance model
for end-to-end video object segmentation. In Proceed-
ings of the IEEE Conference on Computer Vision and
Pattern Recognition, pages 8953–8962.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Advances in neural information process-
ing systems, pages 1097–1105.
Li, X., Qi, Y., Wang, Z., Chen, K., Liu, Z., Shi, J., Luo,
P., Tang, X., and Loy, C. C. (2017). Video object
segmentation with re-identification. arXiv preprint
arXiv:1708.00197.
Luiten, J., Voigtlaender, P., and Leibe, B. (2018). Pre-
mvos: Proposal-generation, refinement and merging
for video object segmentation. In Asian Conference
on Computer Vision, pages 565–580. Springer.
Maninis, K.-K., Caelles, S., Chen, Y., Pont-Tuset, J., Leal-
Taix
´
e, L., Cremers, D., and Van Gool, L. (2018).
Video object segmentation without temporal informa-
tion. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence (TPAMI).
Maninis, K.-K., Pont-Tuset, J., Arbel
´
aez, P., and Van Gool,
L. (2016). Deep retinal image understanding. In In-
ternational conference on medical image computing
and computer-assisted intervention, pages 140–148.
Springer.
M
¨
arki, N., Perazzi, F., Wang, O., and Sorkine-Hornung, A.
(2016). Bilateral space video segmentation. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition, pages 743–751.
Oh, S. W., Lee, J.-Y., Xu, N., and Kim, S. J. (2019). Video
object segmentation using space-time memory net-
works. In Proceedings of the IEEE International Con-
ference on Computer Vision, pages 9226–9235.
Papazoglou, A. and Ferrari, V. (2013). Fast object segmen-
tation in unconstrained video. In Proceedings of the
IEEE International Conference on Computer Vision,
pages 1777–1784.
Peng, C., Zhang, X., Yu, G., Luo, G., and Sun, J. (2017).
Large kernel matters–improve semantic segmentation
by global convolutional network. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 4353–4361.
Perazzi, F., Khoreva, A., Benenson, R., Schiele, B., and
Sorkine-Hornung, A. (2017). Learning video object
segmentation from static images. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 2663–2672.
Perazzi, F., Pont-Tuset, J., McWilliams, B., Van Gool, L.,
Gross, M., and Sorkine-Hornung, A. (2016a). A
benchmark dataset and evaluation methodology for
video object segmentation. In Computer Vision and
Pattern Recognition.
Perazzi, F., Pont-Tuset, J., McWilliams, B., Van Gool, L.,
Gross, M., and Sorkine-Hornung, A. (2016b). A
benchmark dataset and evaluation methodology for
video object segmentation. In Proceedings of the
IEEE Conference on Computer Vision and Pattern
Recognition, pages 724–732.
Pont-Tuset, J., Perazzi, F., Caelles, S., Arbel
´
aez, P.,
Sorkine-Hornung, A., and Van Gool, L. (2017). The
2017 davis challenge on video object segmentation.
arXiv preprint arXiv:1704.00675.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Shankar Nagaraja, N., Schmidt, F. R., and Brox, T. (2015).
Video segmentation with just a few strokes. In Pro-
ceedings of the IEEE International Conference on
Computer Vision, pages 3235–3243.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Tokmakov, P., Alahari, K., and Schmid, C. (2017). Learn-
ing video object segmentation with visual memory. In
Proceedings of the IEEE International Conference on
Computer Vision, pages 4481–4490.
Ventura, C., Bellver, M., Girbau, A., Salvador, A., Mar-
ques, F., and Giro-i Nieto, X. (2019). Rvos: End-to-
end recurrent network for video object segmentation.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 5277–5286.
Hybrid-S2S: Video Object Segmentation with Recurrent Networks and Correspondence Matching
191

Voigtlaender, P. and Leibe, B. (2017). Online adaptation
of convolutional neural networks for video object seg-
mentation. arXiv preprint arXiv:1706.09364.
Wang, X., Girshick, R., Gupta, A., and He, K. (2018). Non-
local neural networks. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 7794–7803.
Wug Oh, S., Lee, J.-Y., Sunkavalli, K., and Joo Kim, S.
(2018). Fast video object segmentation by reference-
guided mask propagation. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 7376–7385.
Xingjian, S., Chen, Z., Wang, H., Yeung, D.-Y., Wong, W.-
K., and Woo, W.-c. (2015). Convolutional lstm net-
work: A machine learning approach for precipitation
nowcasting. In Advances in neural information pro-
cessing systems, pages 802–810.
Xu, N., Yang, L., Fan, Y., Yue, D., Liang, Y., Yang, J.,
and Huang, T. (2018). Youtube-vos: A large-scale
video object segmentation benchmark. arXiv preprint
arXiv:1809.03327.
Yang, L., Wang, Y., Xiong, X., Yang, J., and Katsaggelos,
A. K. (2018). Efficient video object segmentation via
network modulation. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 6499–6507.
Yang, Z., Wang, Q., Bertinetto, L., Hu, W., Bai, S., and
Torr, P. H. (2019). Anchor diffusion for unsuper-
vised video object segmentation. In Proceedings of
the IEEE international conference on computer vi-
sion, pages 931–940.
Zhang, Y., Wu, Z., Peng, H., and Lin, S. (2020). A transduc-
tive approach for video object segmentation. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition, pages 6949–6958.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
192
