
Prototype Reduction on sEMG Data for Instance-based Gesture
Learning towards Real-time Prosthetic Control
Tim Sziburis
1 a
, Markus Nowak
2 b
and Davide Brunelli
3 c
1
Department of Computer Science, Ruhr West University of Applied Sciences, 45407 M
¨
ulheim an der Ruhr, Germany
2
Institute of Robotics and Mechatronics, German Aerospace Center (DLR), 82234 Weßling, Germany
3
Department of Industrial Engineering, DII, University of Trento, 38123 Trento, Italy
Keywords:
Surface Electromyography, Embedded Systems, Wearable Systems, Prototype Reduction, Dataset Reduction,
Instance-based Learning, Gesture Recognition, Machine Learning, Prosthetics.
Abstract:
Current systems of electromyographic prostheses are controlled by machine learning techniques for gesture
detection. Instance-based learning showed promising results concerning classification accuracy and robustness
without explicit model training. However, it suffers from high computational demands in the prediction phase,
which can be problematic in real-time scenarios. This paper aims at combining such learning schemes with
the concept of prototype reduction to decrease the amount of data processed in each prediction step. First, a
suitability assessment of state-of-research reduction algorithms is conducted. This is followed by a practical
feasibility analysis of the approach. For this purpose, several datasets of signal classes from exerting specific
gestures are captured with an eight-channel EMG armband. Based on the recorded data, prototype reduction
algorithms are comparatively applied. The dataset reduction is characterized by the time needed for reduction
as well as the possible data reduction rate. The classification accuracy when using the reduced set in cross-
validation is analyzed with an exemplary kNN classifier. While showing promising values in reduction time
as well as excellent classification accuracy, a reduction rate of over 99% can be achieved in all tested gesture
configurations. The reduction algorithms LVQ3 and DSM turn out to be particularly convenient.
1 MOTIVATION AND RELATED
WORK
The k nearest neighbour classification technique
(kNN) as an exemplary instance-based machine learn-
ing scheme has shown several advantageous proper-
ties in the context of gesture recognition (intent de-
tection) based on surface electromyography (sEMG)
signals for prosthetics. In preliminary studies, kNN
showed promising results in classification accuracy,
generalizability, as well as user study success rate
(Cipriani et al., 2011; Geethanjali, 2015; Tello et al.,
2013; Khushaba et al., 2016; Sziburis et al., 2020).
Moreover, it turned out to perform well in terms of
robustness, i. a., against sampling frequency variation
(Chen et al., 2017) and electrode shift (Li et al., 2016).
It is characterized by a comparably low implementa-
tion complexity. Furthermore, instance-based learn-
a
https://orcid.org/0000-0002-7741-1276
b
https://orcid.org/0000-0002-0840-5155
c
https://orcid.org/0000-0001-5110-6823
ing schemes provide the benefits of no explicit math-
ematical model generation, and incrementality, i. e.
the possibility to extend the dataset by new samples
at any time with them being equally considered.
While these characteristics speak in favour of em-
bedded applicability in the context of wearable real-
time systems, an important drawback of instance-
based learning schemes is the necessity of comparing
new arriving data instances (samples) in the predic-
tion phase to all already stored ones. The needed it-
erations over all samples lead to potentially computa-
tionally intense operations, depending on the amount
of data, i. e. the samples to be iterated in every pre-
diction step (Sziburis et al., 2020).
For this reason, this work analyzes the suitability
of concepts to reduce the computational effort during
prediction in instance-based learning schemes. Al-
though no explicit model training takes place, the data
stored in memory is referred to as training data in this
paper.
Two main approaches to improve the performance
in this regard can be pointed out. The first possibility
Sziburis, T., Nowak, M. and Brunelli, D.
Prototype Reduction on sEMG Data for Instance-based Gesture Learning towards Real-time Prosthetic Control.
DOI: 10.5220/0010327502990305
In Proceedings of the 14th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2021) - Volume 4: BIOSIGNALS, pages 299-305
ISBN: 978-989-758-490-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
299

is the utilization of memory-efficient, optimized data
structures, e. g. “ball-tree data structures, hashing”
(Kusner et al., 2014).
The second approach is data reduction and aims at
decreasing the amount of signal data gathered during
training and stored in memory. It can be principally
applied in a horizontal (feature space) and in a verti-
cal dimension (sample space). Aside from that, there
are techniques using approximations, such as Large
Margin Nearest Neighbour (Kusner et al., 2014) for
kNN.
Horizontal data reduction is limited by the high
variance of EMG signals. Nevertheless, the con-
cept of feature selection (or horizontal thinning) has
been applied in the context of pattern-recognition-
based prosthetic control for datasets of high feature
space dimensions, e. g. in the form of biologically in-
spired methods such as genetic algorithms and parti-
cle swarm optimization (Purushothaman, 2016). Fur-
ther concepts of horizontal data reduction are fea-
ture discretization, projection and positioning (Kus-
ner et al., 2014). These come along with dimensional-
ity reduction algorithms, e. g. PCA (G
¨
uler and Koc¸er,
2005) and adaptions (Nagata et al., 2005) as well as
variants of LDA (Negi et al., 2016).
The concept of vertical data reduction is mainly
referred to as prototype reduction. This paper will
examine techniques of this group in the context of
EMG gesture data. Prototype stands for data instance
or sample. However, it also indicates that it refers to
specific instances that represent a larger amount of in-
stances to a certain extent.
Garc
´
ıa et al. (Garc
´
ıa et al., 2012) and Triguero et
al. (Triguero et al., 2012) provide an overview of a
variety of prototype reduction algorithms proposed.
The methods are divided into two groups: On the
one hand prototype selection (selecting a subset of in-
stances from the existing ones stored in memory, also
called vertical thinning), and on the other hand proto-
type generation (creating new instances based on the
existing ones to represent the whole dataset).
2 CONCEPTUAL APPROACH
The presented approach consists of reducing the com-
putational effort of prediction steps by decreasing the
number of samples within the gesture dataset. For this
purpose, the term reduction rate describes the num-
ber of samples finally stored in memory relative to
the number of originally recorded samples.
2.1 Theoretical Requirements
First, an assessment of the variety of algorithms re-
viewed in (Garc
´
ıa et al., 2012) for prototype selec-
tion and (Triguero et al., 2012) for prototype gener-
ation will be conducted, regarding the suitability of
each method. Suitable methods should not influence
the incrementality of the applied instance-based clas-
sifier and provide a possibility to specify the number
of prototypes in the final set or accordingly the reduc-
tion rate beforehand. The latter characteristic will be
called size determinism in the following.
Moreover, there is the requirement of real-time ca-
pability which refers to the prediction phase of ges-
ture recognition, since this phase takes place online
and continuously decides on user satisfaction. The
real-time property is guided by timing determinism,
i. e. executing an identical number of operations per
prediction. This can be achieved by establishing the
same number of stored instances to be considered in
each prediction step. To guarantee that, size determin-
ism is inherently necessary. In order to provide fast
reaction times, the number of stored samples should
be as low as possible. Additionally, by providing size
determinism, deterministic memory demands are fa-
cilitated.
In the training phase, in contrast, sample captur-
ing and offline calculations take place, which are not
meant to be applied in real-time. Therefore, it is not
particularly needed to cope with real-time require-
ments in this phase. However, training computations
should progress as fast as possible to avoid delays
for the user between training and utilizing the gesture
prediction system.
2.2 Practical Methods
After their theoretical assessment, promising algo-
rithms will be practically evaluated in experiments on
datasets of the linear envelope of rectified EMG sig-
nals. They consist of samples captured when exerting
multiple sets of varying gesture configurations with
an eight-channel state-of-the-art armband positioned
on the forearm. With that, one sample is composed of
eight 32-bit floating-point values.
Within one dataset, four repetition blocks are al-
ternatingly recorded for each of the gestures, whereat
each repetition block consists of 400 samples (i. e.
two seconds offline data sample recording at a cap-
turing rate of 200 Hz) per gesture. Overall, three such
datasets with slightly differing sensor positionings are
recorded per gesture configuration.
The following differing gesture configurations are
selected in order to test the reduction algorithms’ po-
BIOSIGNALS 2021 - 14th International Conference on Bio-inspired Systems and Signal Processing
300

tential dependence on inter-class properties:
• rest state, power grasp, wrist flexion, wrist exten-
sion (6400 samples per dataset),
• rest state, power grasp, pointing, wrist flexion,
wrist extension (8000 samples per dataset),
• rest state, power grasp, wrist flexion, wrist exten-
sion, wrist pronation, wrist supination (9600 sam-
ples per dataset), and
• rest state, power grasp, pointing, wrist flexion,
wrist extension, wrist pronation, wrist supination
(11200 samples per dataset).
The mentioned inter-class property dependence
could occur in the case of by-trend overlapping
classes, as in power grasp and pointing gesture where
similar groups of muscles are addressed for gesture
exertion (apart from the index finger degree of free-
dom specifically needed for the pointing gesture).
Another potential case could be wrist flexion and
supination, as well as wrist extension and pronation,
which respectively address the same groups of mus-
cles, again with the exception of individual single
degrees of freedom. Another reason for selecting
several gesture configuration sets is the aim to ana-
lyze the dependence of dataset reduction on the initial
dataset size due to differing sample numbers.
The achieved accuracies using the reduced sets
will be assessed in cross-validation with an exemplary
kNN classifier. Since the assumption of independent
and identically distributed random variables does not
hold for samples within the same repetition block of
one gesture due to the time-dependent capturing pro-
cess, a group-wise cross-validation scheme is applied.
This means that prototype reduction takes place on
the combined set of one repetition block per gesture
(group) and the resulting prototype samples are only
validated against samples from other groups, i. e. not
against those from the same group. The average will
be taken for all possible groupings per algorithm and
gesture configuration (folds).
The kNN configuration is chosen to apply a
weighting of the distance d by
1
/d
2
with a Euclidean
distance metric. With selecting k = 1, the algorithmic
runtime behaviour of the validation classifier can be
reduced from O(n · log(n)) (due to sorting) to O(n)
(minimum search) with n being the number of sam-
ples in the reduced set. This was chosen as classifier
setting.
Besides accuracy, the averaged runtime will be
analyzed. The runtime consists of two components,
namely the reduction time of the algorithm plus the
time needed for validation. Since the validation is
the same process for each cross-validation fold within
datasets of the same gesture configuration, the valida-
tion time can be disregarded for the purpose of com-
parison. Considering that, the runtime constitutes a
representative measure for the algorithms’ reduction
times.
3 THEORETICAL ASSESSMENT
Among the prototype selection algorithms in (Garc
´
ıa
et al., 2012) only Random Mutation Hill Climbing
RMHC (Skalak, 1994) inherently possesses the char-
acteristic of size determinism, as it is the only method
with fixed reduction. However, RMHC is a wrapper
method, which means that in each step the decision
if to select a prototype or not, a complete classifier
evaluation has to take place so that high computa-
tion times during the reduction process have to be
expected. In (Garc
´
ıa et al., 2012, p. 425–427) it is
shown that this assumption holds in real use-cases for
variably sized sets of data. Exemplary tests on EMG
datasets confirmed this behaviour so that RMHC was
excluded from further consideration.
Besides the fixed reduction prototype selection al-
gorithms, there may be also mixed reduction methods
which provide the property of determinism with re-
spect to the number of samples contained in the final
training set. Nevertheless, the algorithms of that cat-
egory described in (Garc
´
ıa et al., 2012) are all wrap-
per methods, too. Due to the respective high execu-
tion times as mentioned before, these methods are not
considered within the scope of this work.
In terms of prototype generation, there is a variety
of fixed reduction approaches, structured as follows:
• Positioning Adjustment, Condensation: Vector
Quantization VQ (Qiaobing Xie et al., 1993),
Learning Vector Quantization (LVQ) methods:
LVQ3 (Kohonen, 1990), LVQ with Training
Counter LVQTC (Odorico, 1997), Decision Sur-
face Mapping DSM (Geva and Sitte, 1991),
• Positioning Adjustment, Hybrid Approach: Parti-
cle Swarm Optimization PSO (Nanni and Lumini,
2009),
• Centroid-based Condensation: Bootstrap Tech-
niques BTS3 (Hamamoto et al., 1997), Adap-
tive Condensing Algorithm Based on Mixtures of
Gaussians MGauss (Lozano et al., 2006),
• Space-splitting: Chen Algorithm (Chen and
J
´
o
´
zwik, 1996).
LVQTC does not provide size determinism so that
it was not taken into account for further evaluation,
while the other algorithms will be practically exam-
ined.
Prototype Reduction on sEMG Data for Instance-based Gesture Learning towards Real-time Prosthetic Control
301
Besides the fixed algorithms, also in prototype
generation there are mixed methods again, which may
principally also provide size determinism:
• Positioning Adjustment, Condensation: Gradient
Descent and Deterministic Annealing MSE (De-
caestecker, 1997), Hybrid LVQ3 HYB, (Kim and
Oommen, 2003), LVQ with Pruning LVQPRU (Li
et al., 2005),
• Positioning Adjustment, Hybrid Approach: Pro-
totype Selection Clonal Selection Algorithm
PSCSA (Garain, 2008) using an artificial im-
mune system model, Evolutionary Nearest Pro-
totype Classifier ENPC (Fern
´
andez and Isasi,
2004), Adaptive Michigan PSO AMPSO (Cer-
vantes et al., 2007),
• Centroid-based Hybrid Approach: Integrated
Concept Prototype Learner ICPL2 (Lam et al.,
2002).
In turn, some of these are wrapper methods
(ENPC, AMPSO) and hence not considered with re-
gard to the previously mentioned reason. The filter
and semi-wrapper methods MSE, HYB, and ICPL2
do not provide size determinism.
Overall, the remaining methods to practically an-
alyze in the subsequent section are MGauss, BTS3,
Chen, LVQ3, LVQPRU, DSM, VQ, and PSCSA.
4 PRACTICAL EVALUATION
Following the experimental configuration presented
in section 2.2, exemplary experiments showed that
a reduction to 20 prototypes in the final set yields
a promising performance (regarding reduction time
and classification accuracy), which was hence set as
the goal.
Figures 1 to 4 illustrate the results of cross-
validation accuracies and runtimes per algorithm and
gesture configuration, averaged over all validation
folds for the corresponding datasets.
The time measurements refer to the usage of the
open-source (GPLv3) tool KEEL (Knowledge Ex-
traction based on Evolutionary Learning) (Triguero
et al., 2017) on GNU/Linux kernel 4.18.0-25 (Intel
Core i7-8550U, 1.80 GHz, 7869 MiB RAM) with
only essential system processes running.
Each repetition block is supposed to have the
same size, just slightly differing due to sampling
rate deviations when the training data was cap-
tured. The training data is reduced to 20 samples
(i. e. 20 times eight channel values with a 32-bit
floating-point number per channel) in each procedure.
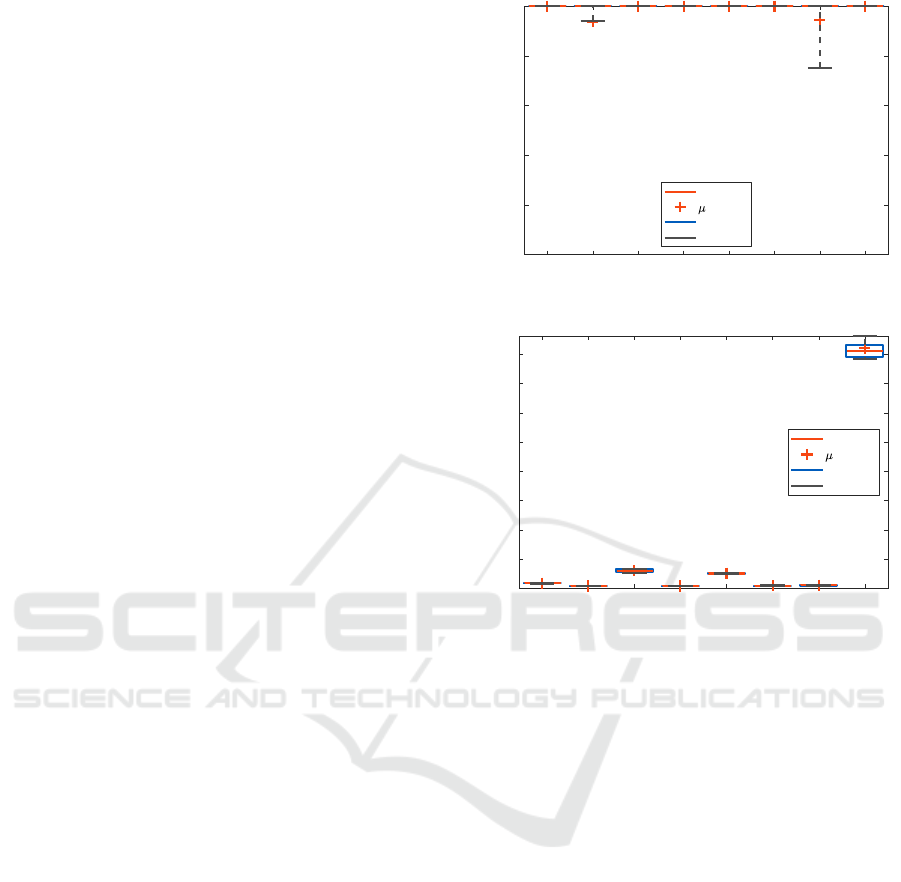
MGauss BTS3 Chen LVQ3 -PRU DSM VQ PSCSA
Reduction Method
0
20
40
60
80
100
Accuracy [%]
Median
25%-75%
9%-91%
(a) Accuracy
MGauss BTS3 Chen LVQ3 -PRU DSM VQ PSCSA
Reduction Method
0
2
4
6
8
10
12
14
16
Runtime [ms]
Median
25%-75%
9%-91%
(b) Reduction time
Figure 1: Averaged performance results for datasets with
four gestures (rest, power, flexion, extension).
Figure 1 shows equally high classification accu-
racies (100%) for all algorithms in all cases, with
small exceptions for BTS3 and VQ exposing some
outliers and therefore higher variance. However, even
these methods yield 100% as median and over 90% as
mean. In terms of time, PSCSA is noticeably worse
than the other algorithms which all deliver times un-
der 2 ms vs. 17 ms for PSCSA. Due to this high dis-
crepancy already in a case with only four gestures and
better performance of the other methods in all cases,
PSCSA was excluded from further consideration.
When additionally including the pointing gesture
(figure 2), i. e. introducing a by-trend overlapping
class, differences among the algorithms can be ob-
served. BTS3 and VQ again show high variances in
accuracy. In comparison to the previous dataset, they
perform even worse, reducing the accuracies from
slightly over 90% in mean to about 85% and 90%
respectively. The other algorithms’ accuracy means
are still close to or at 100%. All medians still lay at
100%. Chen, MGauss and LVQPRU have a compara-
bly broad variance of runtime, leading to the assump-
BIOSIGNALS 2021 - 14th International Conference on Bio-inspired Systems and Signal Processing
302
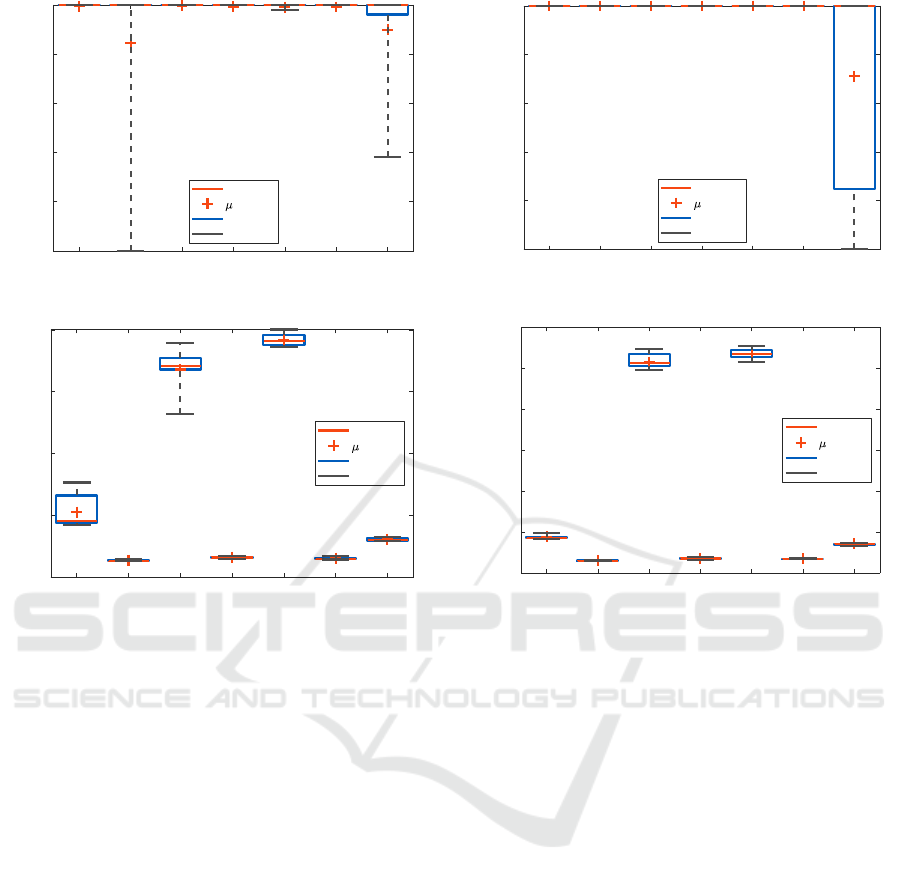
MGauss BTS3 Chen LVQ3 -PRU DSM VQ
Reduction Method
0
20
40
60
80
100
Accuracy [%]
Median
25%-75%
9%-91%
(a) Accuracy
MGauss BTS3 Chen LVQ3 -PRU DSM VQ
Reduction Method
0
0.5
1
1.5
2
Runtime [ms]
Median
25%-75%
9%-91%
(b) Reduction time
Figure 2: Averaged performance results for datasets with
five gestures (rest, power, point, flexion, extension).
tion of higher nondeterminism during execution. Fur-
thermore, these three algorithms yielded the highest
means and medians in runtime.
A dataset without point gesture but with wrist
pronation and wrist supination (figure 3) does not
seem to affect the accuracy of BTS3 anymore (con-
stantly at 100%), although VQ’s results even more
(accuracy mean of 70% but still median of 100%).
The other schemes provide 100% in all cases. The
timings of Chen and LVQPRU still show the high-
est mean and median as well as variance. Among the
remaining algorithms, MGauss and VQ are slightly
slower than BTS3, LVQ3, and DSM.
Testing all gestures, i. e. including pointing ges-
ture as well as wrist rotations (figure 4), summarizes
previous observations, i. e. the reduced accuracy of
BTS3 and VQ with a mean of about 80% while the
others provide 100%. All algorithms expose a me-
dian accuracy of 100%. Regarding timing, Chen and
LVQPRU have the highest means and medians. Fur-
thermore, their timing variance can be considered as
high, leading to the presumption of reduced time de-
terminism.
MGauss BTS3 Chen LVQ3 -PRU DSM VQ
Reduction Method
0
20
40
60
80
100
Accuracy [%]
Median
25%-75%
9%-91%
(a) Accuracy
MGauss BTS3 Chen LVQ3 -PRU DSM VQ
Reduction Method
0
0.5
1
1.5
2
2.5
3
Runtime [ms]
Median
25%-75%
9%-91%
(b) Reduction time
Figure 3: Averaged performance results for datasets with
six gestures (rest, power, flexion, extension, pronation,
supination).
5 DISCUSSION AND OUTLOOK
The results showed that the approach of prototype
reduction seems promising to cope with the main
drawback of instance-based learning in the context
of EMG-based gesture detection for real-time embed-
ded applications, such as prosthetic control. The ex-
amined algorithms are suitable to be used with any
instance-based learning technique; the general feasi-
bility could be demonstrated with a kNN classifica-
tion scheme. The reduction of data processed in pre-
diction to a deterministic and low number of 20 data
samples (i. e. reduction rate of over 99%) while pre-
serving excellent classification accuracy could be suc-
cessfully shown. With that, data with no informa-
tional content regarding classification can be disre-
garded. The very high possible reduction rate points
out the prevalent existence of that kind of data. How-
ever, detailed analyses of the dependence on reduction
rate have to be conducted, considering a higher num-
ber and greater variety of gesture datasets as well as
Prototype Reduction on sEMG Data for Instance-based Gesture Learning towards Real-time Prosthetic Control
303
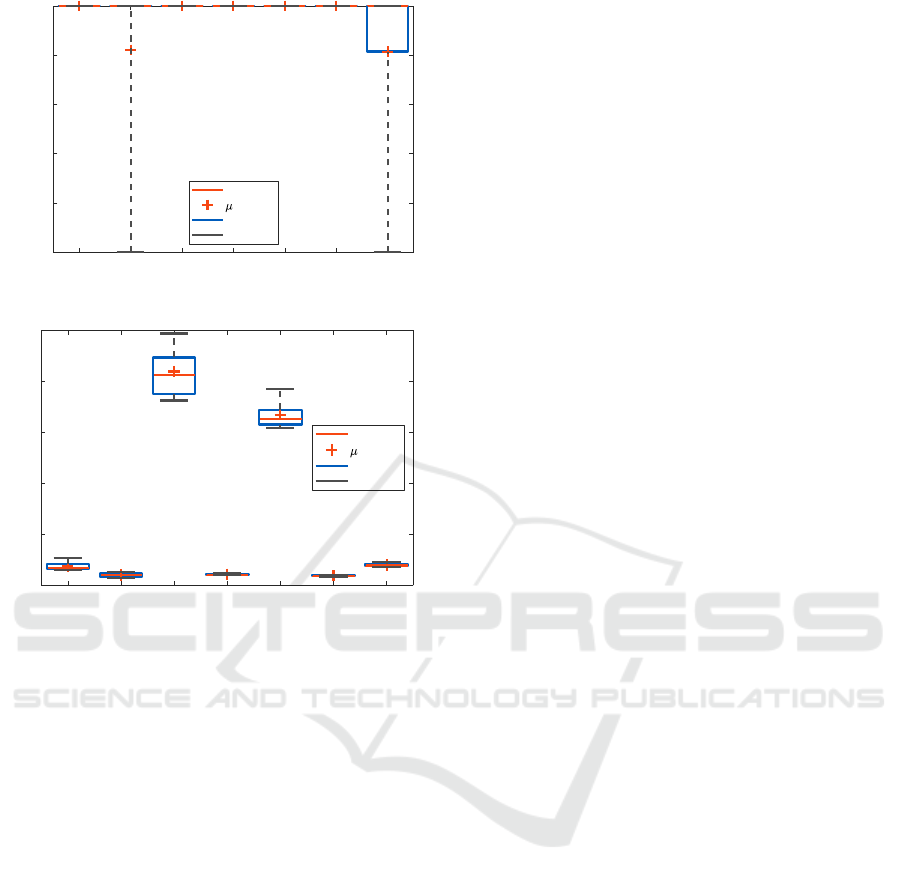
MGauss BTS3 Chen LVQ3 -PRU DSM VQ
Reduction Method
0
20
40
60
80
100
Accuracy [%]
Median
25%-75%
9%-91%
(a) Accuracy
MGauss BTS3 Chen LVQ3 -PRU DSM VQ
Reduction Method
0
1
2
3
4
5
Runtime [ms]
Median
25%-75%
9%-91%
(b) Reduction time
Figure 4: Averaged performance results for datasets with
seven gestures (rest, power, point, flexion, extension, prona-
tion, supination).
the influence of the chosen classifier and its parame-
terization.
While the main aspect of coping with compu-
tationally high demands in real-time instance-based
learning is the prediction phase, the training phase has
no explicit real-time requirement as it takes place in
an offline manner. However, the training time should
be as short as possible in order to avoid delays for
the user before being able to interact with the sys-
tem, which is especially important in actual wearable
prosthetic devices. On the present simulation sys-
tem, prompt training runtimes under 0.5 ms could be
achieved in all datasets for the best-performing algo-
rithms (including cross-validation time). The timing
characteristics have to be further evaluated on differ-
ing types of embedded systems, under consideration
of specific requirements in prosthetic applications.
For all used combinations of gestures, especially
LVQ3 and DSM (both based on Learning Vector
Quantization, LVQ) turned out to be of particular in-
terest. The PSCSA algorithm was already disregarded
in an early stage due to around 16 times higher run-
times in comparison to the other methods, which can
be related to the complexity of the artificial immune
system model behind.
While all evaluated algorithms interestingly
yielded 100% as median after reducing the origi-
nal datasets to 20 samples, LVQ3, DSM, Chen and
MGauss provided 100% classification accuracy even
as mean value. Among these methods, MGauss and
especially Chen exhibit comparably high reduction
times (together with LVQPRU).
With a low runtime of about 0.2 ms in most cases
and a low runtime variance, LVQ3 and DSM seem to
be the most suitable among the tested reduction al-
gorithms for real-time scenarios and embedded ap-
plications. This will be subject to further research,
with specifically adapting the algorithmic program-
ming and hardware frameworks as well as an in-depth
examination of time complexity and tuning all param-
eters involved. Moreover, user studies have to be con-
ducted with participants performing target achieve-
ment tests in online gesture classification and real-
time prosthetic control applications.
ACKNOWLEDGMENTS
This work is supported by the Ministry of Eco-
nomics, Innovation, Digitization and Energy of the
State of North Rhine-Westphalia and the European
Union, grants GE-2-2-023A (REXO) and IT-2-2-023
(VAFES).
REFERENCES
Cervantes, A., Galv
´
an, I., and Isasi, P. (2007). An adap-
tive michigan approach pso for nearest prototype clas-
sification. In Mira, J. and
´
Alvarez, J. R., editors,
Nature Inspired Problem-Solving Methods in Knowl-
edge Engineering, pages 287–296, Berlin, Heidel-
berg. Springer Berlin Heidelberg.
Chen, C. and J
´
o
´
zwik, A. (1996). A sample set condensation
algorithm for the class sensitive artificial neural net-
work. Pattern Recognition Letters, 17(8):819 – 823.
Chen, H., Zhang, Y., Zhang, Z., Fang, Y., Liu, H., and
Yao, C. (2017). Exploring the relation between emg
sampling frequency and hand motion recognition ac-
curacy. In 2017 IEEE International Conference on
Systems, Man, and Cybernetics (SMC), pages 1139–
1144.
Cipriani, C., Antfolk, C., Controzzi, M., Lundborg, G.,
Rosen, B., Carrozza, M. C., and Sebelius, F. (2011).
Online myoelectric control of a dexterous hand pros-
thesis by transradial amputees. IEEE Transactions
on Neural Systems and Rehabilitation Engineering,
19(3):260–270.
BIOSIGNALS 2021 - 14th International Conference on Bio-inspired Systems and Signal Processing
304

Decaestecker, C. (1997). Finding prototypes for nearest
neighbour classification by means of gradient descent
and deterministic annealing. Pattern Recognition,
30(2):281 – 288.
Fern
´
andez, F. and Isasi, P. (2004). Evolutionary design of
nearest prototype classifiers. Journal of Heuristics,
10(4):431–454.
Garain, U. (2008). Prototype reduction using an artificial
immune model. Pattern Anal. Appl., 11:353–363.
Garc
´
ıa, S., Derrac, J., Cano, J., and Herrera, F. (2012).
Prototype selection for nearest neighbor classifica-
tion: Taxonomy and empirical study. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
34(3):417–435.
Geethanjali, P. (2015). Comparative study of pca in clas-
sification of multichannel emg signals. Australasian
Physical & Engineering Sciences in Medicine,
38(2):331–343.
Geva, S. and Sitte, J. (1991). Adaptive nearest neighbor pat-
tern classifier. IEEE transactions on neural networks
/ a publication of the IEEE Neural Networks Council,
2:318–22.
G
¨
uler, N. F. and Koc¸er, S. (2005). Classification of emg
signals using pca and fft. Journal of Medical Systems,
29(3):241–250.
Hamamoto, Y., Uchimura, S., and Tomita, S. (1997). A
bootstrap technique for nearest neighbor classifier de-
sign. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, 19(1):73–79.
Khushaba, R. N., Al-Timemy, A., Al-Ani, A., and Al-
Jumaily, A. (2016). Myoelectric feature extraction
using temporal-spatial descriptors for multifunction
prosthetic hand control. In 2016 38th Annual In-
ternational Conference of the IEEE Engineering in
Medicine and Biology Society (EMBC), pages 1696–
1699.
Kim, S.-W. and Oommen, B. J. (2003). A brief taxonomy
and ranking of creative prototype reduction schemes.
Pattern Analysis & Applications, 6(3):232–244.
Kohonen, T. (1990). The self-organizing map. Proceedings
of the IEEE, 78(9):1464–1480.
Kusner, M. J., Tyree, S., Weinberger, K., and Agrawal, K.
(2014). Stochastic neighbor compression. In Proceed-
ings of the 31st International Conference on Machine
Learning - Volume 32, ICML’14, pages II–622–II–
630. JMLR.org.
Lam, W., Keung, C.-K., and Liu, D. (2002). Discovering
useful concept prototypes for classification based on
filtering and abstraction. Pattern Analysis and Ma-
chine Intelligence, IEEE Transactions on, 24:1075–
1090.
Li, J., Manry, M. T., Yu, C., and Wilson, D. R.
(2005). Prototype classifier design with pruning. In-
ternational Journal on Artificial Intelligence Tools,
14(01n02):261–280.
Li, Q. X., Chan, P. P. K., Zhou, D., Fang, Y., Liu, H., and
Yeung, D. S. (2016). Improving robustness against
electrode shift of semg based hand gesture recogni-
tion using online semi-supervised learning. In 2016
International Conference on Machine Learning and
Cybernetics (ICMLC), volume 1, pages 344–349.
Lozano, M., Sotoca, J. M., S
´
anchez, J. S., Pla, F., Pkalska,
E., and Duin, R. P. W. (2006). Experimental study
on prototype optimisation algorithms for prototype-
based classification in vector spaces. Pattern Recogn.,
39(10):1827–1838.
Nagata, K., Adno, K., Magatani, K., and Yamada, M.
(2005). A classification method of hand movements
using multi channel electrode. In 2005 IEEE Engi-
neering in Medicine and Biology 27th Annual Confer-
ence, pages 2375–2378.
Nanni, L. and Lumini, A. (2009). Particle swarm opti-
mization for prototype reduction. Neurocomputing,
72:1092–1097.
Negi, S., Kumar, Y., and Mishra, V. M. (2016). Feature ex-
traction and classification for emg signals using linear
discriminant analysis. In 2016 2nd International Con-
ference on Advances in Computing, Communication,
Automation (ICACCA) (Fall), pages 1–6.
Odorico, R. (1997). Learning vector quantization with
training count (lvqtc). Neural networks : the official
journal of the International Neural Network Society,
10(6):1083—1088.
Purushothaman, G. (2016). Myoelectric control of pros-
thetic hands: State-of-the-art review. Medical De-
vices: Evidence and Research, Volume 9:247–255.
Qiaobing Xie, Laszlo, C. A., and Ward, R. K. (1993). Vec-
tor quantization technique for nonparametric classifier
design. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 15(12):1326–1330.
Skalak, D. B. (1994). Prototype and feature selection by
sampling and random mutation hill climbing algo-
rithms. In Cohen, W. W. and Hirsh, H., editors, Ma-
chine Learning Proceedings 1994, pages 293 – 301.
Morgan Kaufmann, San Francisco (CA).
Sziburis, T., Nowak, M., and Brunelli, D. (2020). knn learn-
ing techniques for proportional myocontrol in pros-
thetics. In Torricelli, D., Akay, M., and Pons, J. L.,
editors, 5th International Conference on NeuroReha-
bilitation (ICNR2020) and 5th International Sympo-
sium on Wearable Robotics (WeRob2020), Converg-
ing Clinical and Engineering Research on Neuroreha-
bilitation IV. Springer.
Tello, R. M. G., Bastos-Filho, T., Costa, R. M., Frizera-
Neto, A., Arjunan, S., and Kumar, D. (2013). Towards
semg classification based on bayesian and k-nn to con-
trol a prosthetic hand. In 2013 ISSNIP Biosignals and
Biorobotics Conference: Biosignals and Robotics for
Better and Safer Living (BRC), pages 1–6.
Triguero, I., Derrac, J., Garcia, S., and Herrera, F. (2012). A
taxonomy and experimental study on prototype gener-
ation for nearest neighbor classification. IEEE Trans-
actions on Systems, Man, and Cybernetics, Part C
(Applications and Reviews), 42(1):86–100.
Triguero, I., Gonz
´
alez, S., Moyano, J., Garc
´
ıa, S., Alcala-
Fdez, J., Luengo, J., Fern
´
andez, A., Del Jesus, M. J.,
Sanchez, L., and Herrera, F. (2017). Keel 3.0: An
open source software for multi-stage analysis in data
mining. International Journal of Computational In-
telligence Systems, 10(1):1238–1249.
Prototype Reduction on sEMG Data for Instance-based Gesture Learning towards Real-time Prosthetic Control
305
