
Fairer Evaluation of Zero Shot Action Recognition in Videos
Kaiqiang Huang, Sarah Jane Delany and Susan Mckeever
Technological University Dublin, Grangegorman, Dublin, Ireland
Keywords:
Human Action Recognition, Zero Shot Learning.
Abstract:
Zero-shot learning (ZSL) for human action recognition (HAR) aims to recognise video action classes that have
never been seen during model training. This is achieved by building mappings between visual and semantic
embeddings. These visual embeddings are typically provided via a pre-trained deep neural network (DNN).
The premise of ZSL is that the training and testing classes should be disjoint. In the parallel domain of ZSL for
image input, the widespread poor evaluation protocol of pre-training on ZSL test classes has been highlighted.
This is akin to providing a sneak preview of the evaluation classes. In this work, we investigate the extent to
which this evaluation protocol has been used in ZSL for human action recognition research work. We show
that in the field of ZSL for HAR, accuracies for overlapping classes are being boosted by between 5.75% to
51.94% depending on the use of visual and semantic features as a result of this flawed evaluation protocol. To
assist other researchers in avoiding this problem in the future, we provide annotated versions of the relevant
benchmark ZSL test datasets in the HAR field: UCF101 and HMDB51 datasets - highlighting overlaps to
pre-training datasets in the field.
1 INTRODUCTION
Over the last decade, the problem of how to iden-
tify human actions in videos (such as ‘running’) has
been addressed via a variety of supervised learning-
based methods (Feichtenhofer et al., 2016; Hara et al.,
2018; Karpathy et al., 2014; Simonyan and Zisser-
man, 2014; Wang and Schmid, 2013). A limit of these
methods, as per all supervised learning, is their in-
ability to identify new classes outside of those in the
model training data. Besides, collecting large-scale
annotated human action datasets and retraining clas-
sification models can be extremely expensive. To ad-
dress this problem, zero-shot learning (ZSL) has been
used in both the image domain (Akata et al., 2013;
Akata et al., 2015; Frome et al., 2013; Norouzi et al.,
2013; Palatucci et al., 2009; Zhang and Saligrama,
2016) and the video domain (Jain et al., 2015; Liu
et al., 2011; Qin et al., 2017; Wang and Chen, 2017b;
Wang and Chen, 2017c; Xu et al., 2015; Xu et al.,
2017; Xu et al., 2016) to classify novel instances
which were not available in the training process. As
shown in Fig.1, visual feature representations are ex-
tracted from action videos as visual embeddings, and
a mapping function is learned between visual embed-
ding and the corresponding semantic embedding in
the training stage. In the ZSL testing phase, visual
features for unseen testing instances are inputted to
the learned mapping function, the semantic embed-
ding is acquired and the action class with the closest
distance by nearest neighbour search in the semantic
embedding space is assigned (Junior et al., 2019). The
issue we address in this paper is the poor evaluation
practice of allowing classes used in the pre-training
dataset to also be used as classes in the ZSL testing
(supposed to be unseen) classes. These overlapping
classes challenge the ”unseen” nature of the ZSL test
classes. In this paper, we answer the following ques-
tions (1) To what extent is this evaluation protocol ap-
plied in the ZSL for HAR research domain to date?
(2) Does the overlap of classes in ZSL testing and pre-
training classes boost ZSL accuracies, thus inflating
ZSL results? In addition to reporting on the issue, we
publish corrected non-overlapping versions of bench-
marks ZSL test datasets in the HAR field for use by
other researchers.
The rest of this paper is structured as follows. In
Section 2, the background for zero-shot action recog-
nition (ZSAR) is described, including visual and se-
mantic embedding, and ZSL methods. In Section 3,
we explain our methods for evaluating the impact of
overlapping classes on benchmark pre-trained mod-
els and ZSL datasets in the HAR field. In Section 4,
experimental implementations are explained in more
206
Huang, K., Delany, S. and Mckeever, S.
Fairer Evaluation of Zero Shot Action Recognition in Videos.
DOI: 10.5220/0010324402060215
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
206-215
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
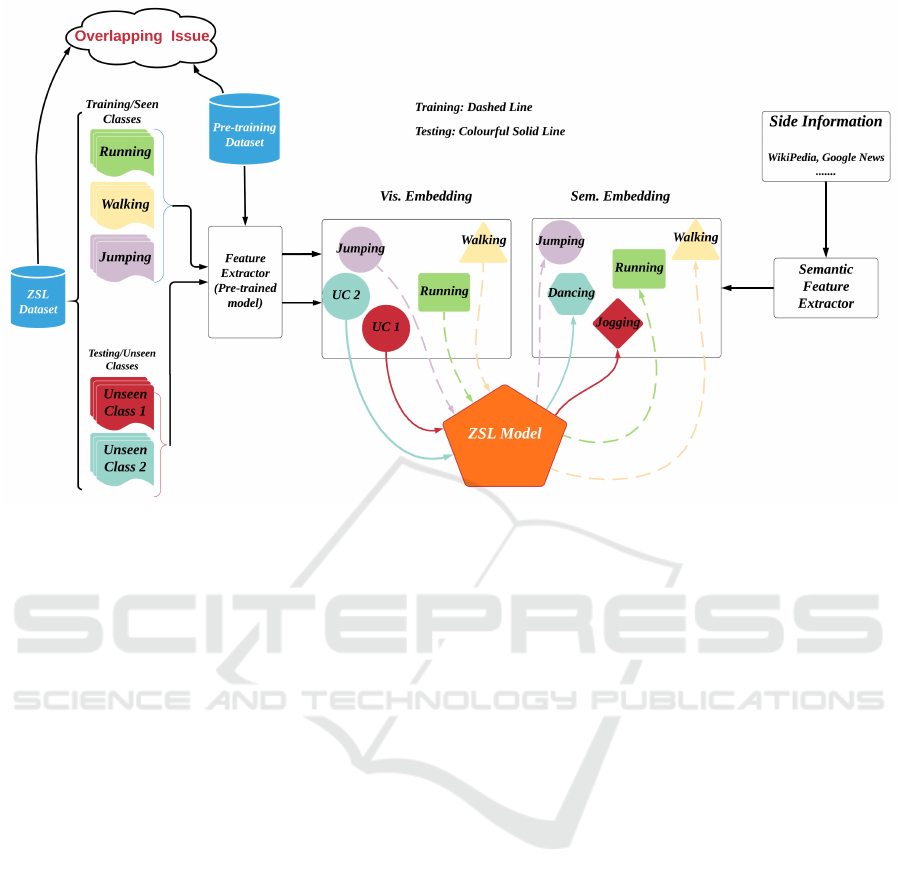
Figure 1: General ZSL Process for HAR. Note that, the colourful solid arrow lines indicate the ZSL training phrase and the
dashed arrow lines indicate the ZSL testing phrase.
detail. In Section 5, the results and findings are
demonstrated and explained. Finally, the conclusion
is drawn in Section 6.
2 BACKGROUND & RELATED
WORK
The aim of ZSL is to break away from the traditional
limitation of supervised learning - to build a classifier
that can identify classes outside those used in train-
ing. The ZSL training stage maps instances of trained
classes to a semantic space, where the wider semantic
space has representations of both training and new un-
seen classes. In the case of human action recognition,
each instance is a video - each represented as a visual
embedding that is extracted from a pre-trained model.
During the ZSL training stage, visual embedding of
instances are mapped to their equivalent semantic la-
bel embedding, as shown in Figure 1. This learned
mapping is then used to map visual embeddings of
new unseen zero-shot test classes into the semantic
space for identification of the new class. Next, we
look at both visual and semantic embedding in more
detail in order to understand the background for our
work.
Visual Embedding. There are two principal ap-
proaches to generating embeddings for the visual rep-
resentations of actions for ZSL (1) Hand-crafted fea-
tures (Wang and Schmid, 2013) and (2) Deep features
(Carreira and Zisserman, 2017; Hara et al., 2018;
Tran et al., 2015). The principal approach to hand-
crafted features, Improved Dense Trajectory (IDT)
(Wang and Schmid, 2013) has been successfully ap-
plied to represent visual information for videos of
actions in early ZSL works. It consists of four de-
scriptors, computed through the tracked trajectories
based on the movement of detected interest points in
a video. More recently, visual representations have
been obtained from pre-trained DNN-based models
(so called ”deep features”) in the ZSL for action
recognition field. As shown in Table 1, there are three
deep feature visual representations used in the field,
namely C3D, I3D and 3D-ResNet. C3D (Tran et al.,
2015) is a deep 3-dimensional convolutional neural
network (3D CNNs) that learns spatio-temporal rep-
resentations for videos. Due to the highly compu-
tationally intense training in 3D CNNs, I3D (Car-
reira and Zisserman, 2017) was proposed. Instead
of a single 3D network, two different 3D networks
are used, containing RGB and flow as two archi-
tectural streams, to represent appearance and optical
flow, respectively. A third pre-trained network, 3D-
ResNet (Hara et al., 2018) was proposed by building
a deeper 3D CNN to learn spatio-temporal informa-
tion from actions. As shown in Table 1, each of these
three deep feature representations is underpinned by
pre-trained models that have been trained on action
Fairer Evaluation of Zero Shot Action Recognition in Videos
207

Table 1: Visual features and pre-training datasets for human actions (Papers in bold indicate that overlap occurs between
pre-training and ZSL test classes).
Visual Features Feature Types Pre-training Datasets Papers Used
IDT Hand Crafted N/A
(Gan et al., 2015; Guadarrama et al., 2013)
(Jain et al., 2015; Qin et al., 2017)
(Xu et al., 2015; Wang and Chen, 2017c)
(Xu et al., 2017; Xu et al., 2016)
(Zhang and Peng, 2018)
C3D Deep Sports-1M
(Brattoli et al., 2020)
(Mandal et al., 2019; Mishra et al., 2020)
(Mishra et al., 2018; Wang and Chen, 2017b)
(Wang and Chen, 2017a; Tian et al., 2019)
(Wang and Chen, 2017c; Zhang et al., 2018)
I3D Deep Kinetics-400
(Mandal et al., 2019; Narayan et al., 2020)
(Piergiovanni and Ryoo, 2018)
(Roitberg et al., 2018)
3D-ResNet Deep Kinetics-400 (Liu et al., 2020)
datasets: Sports-1M for C3D, and Kinetics-400 for
both I3D and 3D-ResNet. Consequently, where these
pre-trained models are used to provide deep visual
feature representations for action instances in videos,
explicit or semantic overlaps between the pre-training
classes with those of the zero-shot test classes should
be avoided, if a ZSL approach is claimed. Table 1
also indicates which research works use these rep-
resentations. Papers in bold
¯
indicate that some de-
gree of overlap occurs between pre-training and ZSL
test classes in the evaluation protocol. Note that IDT
does not involve a pre-trained model so the issue
of overlapping of pre-training and ZSL test classes
is not relevant. There are two leading benchmark
ZSL datasets in the ZSL action recognition field: (1)
UCF101 (Soomro et al., 2012) and (2) HMDB51
(Kuehne et al., 2011). Our identification of overlap-
ping classes between these two ZSL datasets the pre-
training datasets is described further in Section 3.1.
Semantic Label Embedding. There are two main
approaches to representing the semantic label space
in ZSL for human action recognition - (1) attribute-
based methods (Liu et al., 2011; Wang and Chen,
2017c) and (2) word embedding based methods
(Mikolov et al., 2013). Attributed-based methods
(i.e. annotated class-level attribute) involve the man-
ual annotation of visual attributes to each action
class. A Golf-Swing action class would include visual
attributes such as single-leg motion and arm-over-
shoulder motion for example. Word embedding is
an alternative approach to attribute-based, removing
the manual annotation requirement and it is widely
used to represent semantics for action classes in re-
cent work (Brattoli et al., 2020; Gao et al., 2019; Jain
et al., 2015; Mandal et al., 2019; Roitberg et al., 2018;
Wang and Chen, 2017c; Xu et al., 2015; Xu et al.,
2016; Zhu et al., 2018).
ZSL Techniques for Human Action Recognition.
A comprehensive overview of ZSL approaches for hu-
man action recognition field is provided by the work
(Junior et al., 2019). We briefly review them here.
Early work for ZSL (Liu et al., 2011) makes use of
human-annotated attributes as semantics to learn a
mapping function from visual embedding to attributes
embedding using an SVM model that can decide the
significance of each attribute for each action class.
LatEm (Xian et al., 2016) introduced a piece-wise
linear compatibility as non-linearity to learn the rela-
tionship between both embeddings by the latent vari-
ables. And each latent variable is encoded for dif-
ferent visual properties of the input data. Instead
of projecting the visual embedding to the semantic
embedding, BiDiLEL (Wang and Chen, 2017c) pro-
jected both visual and semantic embeddings into a
low-dimensional latent embedding in order to pre-
serve the intrinsic relationships between them. The
SynC approach (Changpinyo et al., 2016) learned a
projection between semantic label embeddings and a
classifier model space. In the classifier model space,
a weighted bipartite graph is created by the training
classes and a set of ”phantom” classes that are syn-
thesised to align semantic embedding and classifier
model spaces by minimising distortion error. ConSE
(Norouzi et al., 2013) is a two-stage approach: First,
it learns the probability for a training action instance
belonging to one of the seen classes. Then, it projects
the visual embedding into the semantic embedding
by taking the convex combination of the top T most
likely seen classes. Finally, the class with the clos-
est cosine distance in the semantic embedding space
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
208

is predicted as the unseen class result. Note that, the
ZSL methods of ConSE, SynC and LatEm were orig-
inally proposed for ZSL image classification, but the
latter work extended them to ZSL for human action
recognition (Liu et al., 2019).
With regards to the issue of overlapping classes
between pre-training and ZSL testing datasets, the
work flagged the problem for ZSL for images (Xian
et al., 2017). However, the issue has had limited
recognition in the domain of ZSL for action recogni-
tion. The work by (Roitberg et al., 2018) proposed an
evaluation procedure that enables fair use of external
data by exploring how semantically similar classes in
the ZSL training and test sets can impact on ZSL for
human action recognition evaluation (i.e. Kinetics-
400 for training and HMDB51 for testing). Similarly,
work by (Brattoli et al., 2020) removing overlapped
classes between ZSL training and testing classes for
their ZSL work. However, neither work addresses the
issue of overlap between pre-training model classes
and ZSL test classes. In the next section, we explain
our approach to quantifying the impact of the pre-
train/test overlapping classes issue for ZSL human ac-
tion recognition evaluation.
3 METHODS
We wish to measure whether classes that appear in
both the pre-trained model training set and the ZSL
test sets are obtaining boosted recognition accuracies.
We will focus on the two leading ZSL datasets in
the field, UCF101 and HMDB51. Classes in these
two benchmark datasets that overlap with the classes
from the two pre-training datasets (Sports-1M and
Kinetics-400) are the root of our problem. First, we
identify and tag these overlapping classes. An over-
lap is defined as two classes having the same name
(i.e. SkyDiving and Knitting in ZSL dataset UCF101
and pre-training dataset Kinetics-400) or a semanti-
cally similar name (i.e. JumpRope in UCF101 and
Skipping rope in Kinetics-400). For the benefit of
other researchers, we publish these tagged benchmark
datasets
1
. Having flagged the overlaps, we can now
create ZSL training/test sets, where we can control
the proportions of overlapping classes in our ZSL
test sets, in order to evaluate their impact on ZSL
accuracies. We will test accuracies using the three
pre-trained models for producing visual deep features
shown in Table 1. We also use a fourth baseline non-
deep approach, IDT, which does not involve any pre-
trained models (and therefore no overlapping issue).
1
https://github.com/kaiqiangh/fairer-eval-zsar
We will measure the ZSL test accuracies of both over-
lapping and non-overlapping classes, for three pre-
trained models and one baseline approach.
3.1 Creating ZSL Training/Test Splits
The next step is to create suitable ZSL training/test
splits for our experiments. The UCF101 dataset has
101 action categories with a total of 13320 videos
collected from YouTube. The HMDB51 dataset con-
tains 51 action categories with 6670 videos in total
collected from commercial videos and YouTube. For
our work, we need to divide our two ZSL datasets
into training and testing splits. In terms of train-
ing/test split size, we note the previous approaches in
ZSL for human action recognition (Wang and Chen,
2017c; Xu et al., 2015): (1) UCF101: 101 classes split
51/50 classes for ZSL training/test respectively. (2)
HMDB51: 51 classes split into 26/25 classes for ZSL
training/test respectively. These previous training/test
splits were created by random selection of classes for
training and test, without any controls of overlapping
classes. We use these dataset split sizes for our work.
As we know which classes in our ZSL datasets are
overlapping with pre-training datasets (shown in Ta-
ble 2), we can now create our own controlled ZSL test
sets consisting of (1) genuinely unseen classes (not
overlapping with pre-trained model - termed ‘true’
unseen classes (TUCs) and (2) problematic overlap-
ping unseen classes (OUCs).
We wish to investigate ZSL accuracies for both
TUCs and OUCs, to determine whether there is a gen-
eral pattern of OUCs achieving higher ZSL accuracies
across the various ZSL techniques. Table 2 shows
the combinations of pre-training datasets and ZSL
datasets that we use in our experiments. Looking at
the first row as an example, for models pre-trained on
Kinetics-400 and ZSL dataset UCF101 (which over-
laps on 61 classes), we split UCF101 into class splits
of 51 for ZSL training, and 50 for ZSL testing, as per
previous ZSL split sizes. For our ZSL test set of 50
classes, we use equal proportions of TUCs and OUCs,
using random selection from the pools of overlapping
and non-overlapping classes. The remaining classes
form our ZSL training set.
3.2 Evaluation Metrics
We aim to measure whether overlapping classes
(OUCs) can achieve higher accuracies than non-
overlapping classes (TUCs) in the ZSL test sets. Class
accuracy is a standard metric in the ZSL field. We
want to measure accuracies for each of OUC and TUC
separately, so we average per-class accuracies as per
Fairer Evaluation of Zero Shot Action Recognition in Videos
209

Table 2: Our splits and training/testing set for UCF101 and HMDB51.
Index Pre-training Datasets Pre-trained Models
ZSL Datasets
(total classes)
Overlapping
Classes
Non-overlapping
Classes
Training
Testing
(OUC + TUC)
OS1 Kinetics-400
I3D
3D-ResNet
UCF101
(101)
61 40 51 50(25+25)
OS2 Sports-1M C3D
UCF101
(101)
36 65 51 50(25+25)
OS3 Kinetics-400
I3D
3D-ResNet
HMDB51
(51)
28 23 26 25(12+13)
OS4 Sports-1M C3D
HMDB51
(51)
17 34 26 25(12+13)
the following equation (Xian et al., 2017) using TUC
as the example:
ACC
TUC
=
1
N
TUC
N
TUC
∑
C=1
# correct predictions in Class C
# instances in Class C
(1)
In addition to comparing absolute differences in
class accuracies, we also want to be able to compare
across ZSL methods and pre-trained models, so we
need a normalised metric. Specifically, we wish to
quantify the boost or gain in accuracy of overlapping
classes in comparison to true unseen classes. We de-
fine an Overlap Gain metric (OverlapGain), which
measures the difference between OUC and TUC rela-
tive to the average accuracy for the ZSL test set. The
equation is defined as:
OverlapGain =
ACC
OUC
− ACC
TUC
Average(ACC
OUC
, ACC
TUC
))
(2)
A positive OverlapGain value indicates that the
average accuracy for OUC is higher than TUCs, indi-
cating a boost for overlapping classes.
4 EXPERIMENTAL SETUP
In this section, we explain the experimental configu-
rations for testing combinations of pre-trained models
and ZSL datasets across a variety of ZSL methods.
We also explain the visual and semantic features used
in experiments and the hyper-parameter settings used
in our ZSL implementations.
4.1 Experiments and Baseline
Table 3 shows five experimental configurations we
will carry out, based on testing three deep pre-trained
models and the baseline approach, against the two
benchmark ZSL datasets. Overlap class gain results
from deep features (i.e C3D and I3D) will be com-
pared to the IDT baseline. For each of these four
experimental configurations, we test the leading ZSL
methods described in Section 2. In the fifth experi-
ment configuration, we are reproducing the results for
one specific ZSL method, BiDiLEL (Wang and Chen,
2017c) as in this work, the actual ZSL training/ test
splits were published with the work, allowing us to
use both their randomly selected ZSL test splits and
compare to our controlled ZSL test splits. This dataset
split information is not available for other ZSL work,
so we will do this comparison for BiDiLEL only. As
per previous work (Wang and Chen, 2017c; Xu et al.,
2017), we use 30 training/test iterations for each eval-
uation.
4.2 Visual and Semantic Embeddings
We adopt the off-the-shelf IDT and C3D provided by
(Wang and Chen, 2017c), and I3D provided by (Man-
dal et al., 2019). Our baseline IDT feature repre-
sentation approach (Wang and Schmid, 2013) con-
tains four different descriptors: HoG, HoF, MBHx
and MBHy. The video representations are generated
by the fisher vector derived from a Gaussian mixture
model with 256 components. To reduce the compu-
tational cost, PCA is applied to reduce dimensions to
3000 for each descriptor, and all descriptors are sim-
ply concatenated to obtain a final 12000-dimensional
vector. For C3D (Tran et al., 2015), a video is di-
vided into 16-frames segments and there is an overlap
of eight frames on two consecutive segments. As a re-
sult, the fc6 activation is first extracted for all the seg-
ments and then averaged to form a 4096-dimensional
representation for a video. I3D (Carreira and Zis-
serman, 2017) contains RGB and Inflated 3D net-
works to generate appearance and flow features from
Mixed 5c layer. For each video instance, the out-
puts from Mixed 5c layer for both networks are av-
eraged through the temporal dimension, pooled in
the spatial dimension and then flattened to obtain a
4096-dimensional vector for appearance and flow fea-
tures, respectively. In the end, both appearance and
flow features are concatenated to represent video with
8192-dimensional vector. 3D-ResNet (Hara et al.,
2018) has been shown to achieve the impressive per-
formance in deeper network style for generic action
recognition, and ResNext-101 model achieved the op-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
210
Table 3: Experimental Configurations. Att. denotes human-annotated attribute and WV denotes Word2Vec.
Experiments Data Splits Index
Pre-training
Datasets
ZSL
Datasets
Semantics Visual Features ZSL Methods
1 OS1 Kinetics-400 UCF101
Att.
WV
IDT (Baseline)
I3D
3D-ResNet
ConSE
BiDiLEL
LatEm
SynC
ovo
SynC
struct
2 OS2 Sports-1M UCF101
Att.
WV
IDT (Baseline)
C3D
3 OS3 Kinetics-400 HMDB51 WV
IDT (Baseline)
I3D
3D-ResNet
4 OS4 Sports-1M HMDB51 WV
IDT(Baseline)
C3D
5
OS2
Sports-1M
UCF101
Att.
WV
IDT(Baseline)
C3D
BiDiLEL
OS4 HMDB51 WV
timal results on UCF101 and HMDB51. Each video
is divided into 16 frames as a segment, and each
frame is resized to 112 × 112, resulting in the size of
3channels × 16 f rames × 112pixels × 112pixels with
50% possibility of horizontal flipping for each seg-
ment as input. Next, the processed video is fed into
ResNext-101 model for feature extraction by taking
the output of a 3D global average pooling layer, of
size 2048, as final video representation.
For semantic embedding, we use both annotated
attributes and Word2Vec. The UCF101 has 115 bi-
nary attributes, defined and provided by (Liu et al.,
2011). As shown in experimental configurations 3
and 4, we do not evaluate annotated attributes as se-
mantics for HMDB51 as there are no published at-
tributes sources for this dataset. With regards to
Word2Vec (Mikolov et al., 2013), a skip-gram model
that was trained on a large-scale text corpus (i.e.
Google News Dataset) is used to deliver a 300-
dimensional vector for each action class label for
both UCF101 and HMDB51, provided by (Wang and
Chen, 2017c).
4.3 ZSL Implementation Details
We adopt off-the-shelf implementations for four lead-
ing ZSL methods in our experiments: ConSE
2
,
BiDiLEL
3
, LatEm
4
and SynC
5
. In ConSE, the hyper-
parameters of C and T are set to 0.1 and 5, re-
spectively. In BiDiLEL, we do not tune any hyper-
2
https://github.com/pujols/zero-shot-learning
3
http://staff.cs.manchester.ac.uk/
∼
kechen/BiDiLEL/
4
https://www.mpi-inf.mpg.de/departments/
computer-vision-and-machine-learning/
research/zero-shot-learning/
latent-embeddings-for-zero-shot-classification
5
https://github.com/pujols/zero-shot-learning
parameters, but directly use the optimal ones from
the original work. As a consequence, there are three
hyper-parameters α, k
G
and d
y
, indicating the trade-
off factor applied to the regularisation for graph con-
struction, the number of nearest neighbours for graph
construction, and the dimensionality of the learned la-
tent space, respectively, and their values are set to 10,
10 and 150 for α, k
G
and d
y
, respectively. Next, sim-
ilar hyper-parameter settings for LatEm, the learning
rate for SGD (θ), the number of epoch for SGD and
the number of embeddings to learn (K) are set to 0.1,
150 and 10, respectively. Lastly, for SynC, the bal-
ance coefficient in the objective function to learn the
base classifiers (λ) and a factor to model correlation
between a real class and a phantom class by attributes
(σ) are set to 2
−10
and 1, respectively. In addition, all
experiments are conducted in MATLAB.
5 RESULTS AND DISCUSSION
In this section, we present and discuss the experimen-
tal results for the configurations shown in Table 3.
For each configuration, we measure the difference in
accuracies of overlapping (OUCs) versus true unseen
classes (TUCs) for the pre-trained models in question.
We compare this difference to that of the baseline ap-
proach (IDT).
5.1 Gains to Overlapping Unseen
Classes: Experiments 1 - 4
For all figures in this section, the X-axis indicates the
ZSL methods evaluated and the Y-axis indicates the
differences of OverlapGain, described in Section 3,
using a pre-trained model over the baseline non-deep
feature i.e. OverlapGain
i3d
− OverlapGain
idt
.
Fairer Evaluation of Zero Shot Action Recognition in Videos
211
Attributes
ConSE BiDiLEL LatEm SynC(OVO) SynC(struct)
-30
-20
-10
0
10
20
30
40
50
The changes of OverlapGain in % (deep v.s. non-deep)
I3D v.s. IDT
3D-ResNet v.s. IDT
Word2Vec
ConSE BiDiLEL LatEm SynC(OVO) SynC(struct)
-30
-20
-10
0
10
20
30
40
50
The changes of OverlapGain in % (deep v.s. non-deep)
I3D v.s. IDT
3D-ResNet v.s. IDT
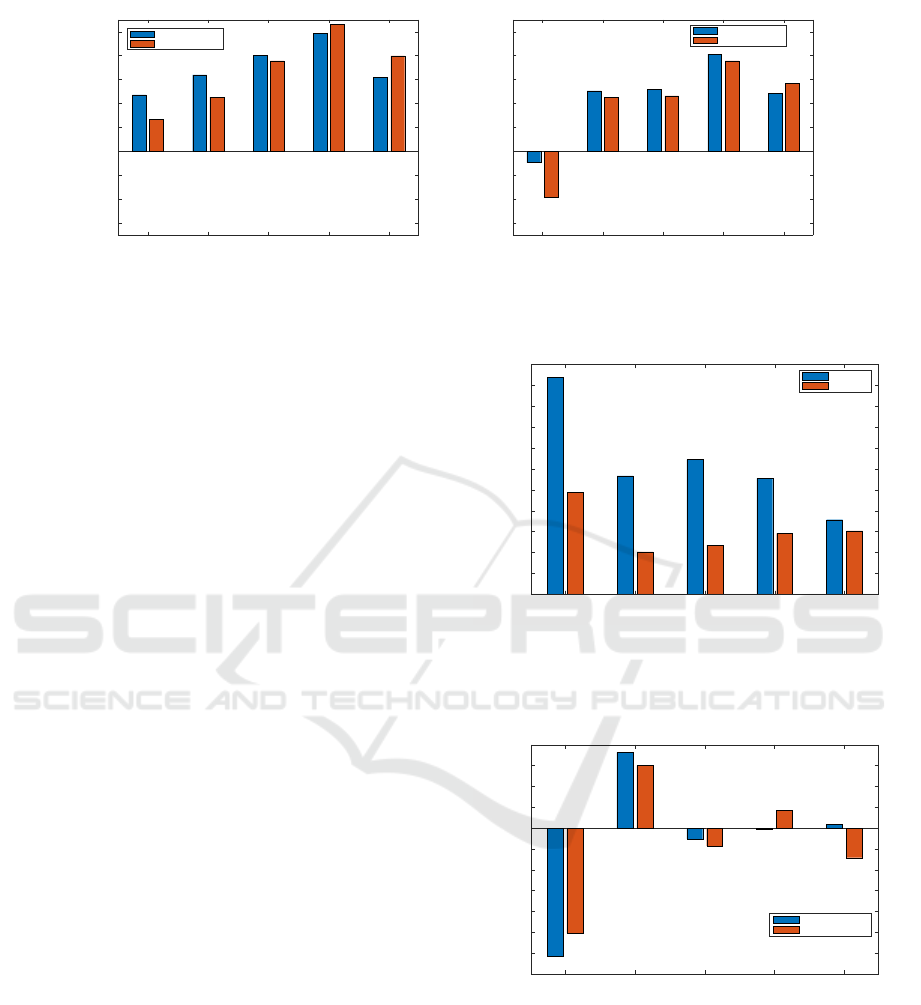
Figure 2: Configuration 1: the differences of OverlapGain in % by comparing deep features (I3D, 3D-ResNet) to baseline
non-deep feature (IDT) with regard to the case of UCF101 with Kinetics-400. Left and right figures shows the results for
Attributes and Word2Vec semantic embeddings approaches, respectively.
Fig.2 shows the results for experimental config-
uration 1 - the increase in the differences in Over-
lapGain for deep features against the baseline non-
deep feature (IDT) where we treat UCF101 as ZSL
dataset and models pre-trained on Kinetics-400 (I3D
and 3D-ResNet). Looking at the configuration on
the left-hand side that uses the attributes as seman-
tic space, the gains over the baseline range for the
pre-trained deep models range from just over 10%
(ConSE for 3D-ResNet) to just over 50% for SynC
for 3D-ResNet). When using Word2Vec as shown on
the right-hand graph, all pre-trained models have a
positive gain for overlapping classes, in comparison
to the non-deep baseline, with the exception of the
ConSE method. Specifically, for the performances
of using attributes, the boosts of 18.52%, 27.30%,
38.93%, 51.21% and 35.48% are gained when eval-
uating on deep features against non-deep feature for
ConSE, BiDiLEL, LatEm, SynC
ovo
and SynC
struct
, re-
spectively. Additionally, for the performances of us-
ing Word2Vec, ConSE obtains a decrease of -11.94%,
but other methods still gain the boosts of 23.87%,
24.55%, 39.21% and 26.36%. As can be seen,
attribute-based semantic spaces show a stronger boost
to overlapping classes accuracies than Word2Vec. We
suggest that human-annotated attributes are better for
transferring semantic knowledge than Word2Vec in
ZSL for human action recognition as attributes are
fully supervised by human experts but Word2Vec is
produced in an unsupervised way.
Fig.3 shows the results for experimental config-
uration 2, where pre-trained model C3D is used for
generating deep visual representations, pre-trained on
the Sports-1M dataset. For the ZSL methods of
ConSE, BiDiLEL, LatEm, SynC
ovo
and SynC
struct
,
the boost to overlapping class is higher than the
baseline IDT by 51.94%, 28.36%, 32.26%, 27.72%
and 17.84% when using attribute, and by 24.46%,
10.14%, 11.75%, 14.57% and 15.19% when using
C3D v.s. IDT
ConSE BiDiLEL LatEm SynC(OVO) SynC(struct)
0
5
10
15
20
25
30
35
40
45
50
55
The changes of OverlapGain in % (deep v.s. non-deep)
Attributes
Word2Vec
Figure 3: Configuration 2: the differences of OverlapGain
in % regarding the case of UCF101 with Sports-1M, for
pre-trained model C3D against baseline IDT along with at-
tribute and Word2Vec as semantic embedding.
The case of HMDB51 with Kinetics-400
ConSE BiDiLEL LatEm SynC(OVO) SynC(struct)
-35
-30
-25
-20
-15
-10
-5
0
5
10
15
20
The changes of OverlapGain in % (deep v.s. non-deep)
I3D v.s. IDT
3D-ResNet v.s. IDT
Figure 4: Configuration 3: the differences of OverlapGain
in % regarding the case of HMDB51 with Kinetics-400.
Word2Vec. Similar to experiment 1, the boost to over-
lap class accuracies is higher for attribute-based se-
mantic spaces than Word2Vec.
Fig.4 shows the results for experimental config-
uration 3. For ZSL dataset HMDB51 with Kinetics-
400 for pre-training, only the BiDiLEL method shows
a gain for overlapped classes against non-lapped over
the baseline. From the perspective of ZSL meth-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
212
The case of HMDB51 with Sports-1M
ConSE BiDiLEL LatEm SynC(OVO) SynC(struct)
0
5
10
15
The changes of OverlapGain in % (deep v.s. non-deep)
C3D v.s. IDT
Figure 5: Configuration 4: the differences of OverlapGain
in % regarding the case of HMDB51 with Sports-1M.
ods, only BiDiLEL aims to project both visual and
semantic embeddings to a low-dimensional latent
embedding, but other methods aim to project vi-
sual to semantic embeddings (i.e. ConSE, SynC)
or directly learn compatibility between embeddings
(i.e. LatEm). We suggest that the influences by
OUCs could be alleviated when predicting ZSL test
classes in a low-dimensional space. Based on the
observations in experiment 3, we find that it does
not fully support our hypothesis. The differences
of OverlapGain from deep to non-deep features
are slightly negative for most ZSL methods, and
clearly negative for ConSE, indicating that overlap-
ping classes are not gaining any advantage over true
unseen classes when using I3D and 3D-ResNet in this
case. We note that the videos in the ZSL dataset
HMDB51 and the Kinetics-400 are noisy, in com-
parison to the UCF101 and Sports-1M datasets. In
HMDB51, the instances have non-clean backgrounds
and videos contain multiple actors. Since this par-
ticular combination of ZSL dataset and pre-trained
dataset does not exhibit a ZSL gain from having a
sneak preview of unseen test classes, the results sug-
gest there is insufficient overlap in a Kinetics-400
class video to the equivalent video class in HMDB51
to provide a boost.
Fig.5 shows the results for experimental config-
uration 4. For ZSL datasets HMDB51 with pre-
training dataset Sports-1M, overlapping classes gain
from 5.75% up to 10.36% across all ZSL methods us-
ing C3D against baseline IDT. To summarise, three
of our four experimental configurations demonstrate
a strong gain for overlapping classes, with the excep-
tion of some ZSL methods in configuration 3 (Kinet-
ics400 pre-training and HMDB51 ZSL test).
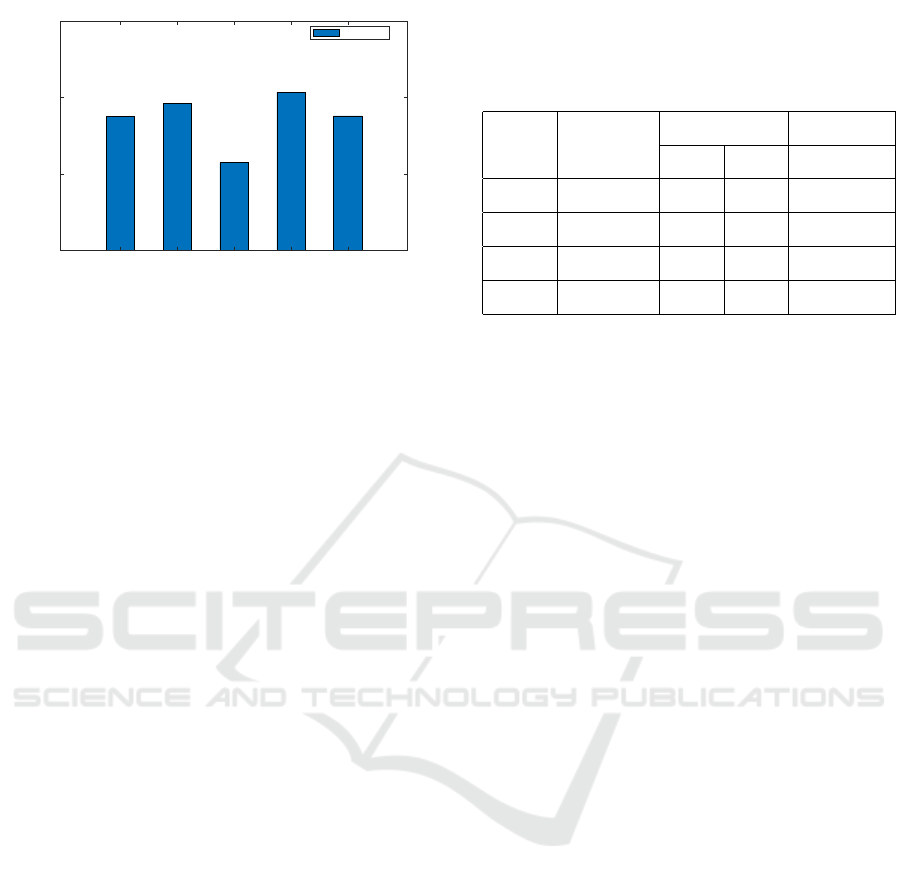
Table 4: Configuration 5: the comparison between previ-
ous splits and our splits for both UCF101 and HMDB51
when evaluating BiDiLEL. The results report average per-
class accuracy in %. Note that, Att. denotes attribute and
WV denotes Word2Vec.
Splits Vis. Rep.
UCF101 HMDB51
Att. WV WV
PS IDT 16.6 15.4 16.4
OS IDT 16.5 15.1 16.0
PS C3D 20.5 18.9 18.6
OS C3D 22.8 19.6 20.6
5.2 Comparison to Previous Work:
Experiment 5
In experimental configuration 5, we examine the im-
pact of using equal split overlapping versus non-
overlapping classes in our ZSL test set - versus re-
sults gained by using previous ZSL training/test in
the field. We analysed the splits used previously by
(Wang and Chen, 2017c; Xu et al., 2015) as previ-
ous splits (PS). In their work, We determined that the
number of classes for OUC and TUC occupy 35.4%
and 64.5% respectively in UCF101, and 32.67% and
67.33% in HMDB51. In our splits (OS), we have
UCF101 (50%/50%), and 48% OUC and 52% TUC in
HMDB51 - the latter mismatch is due to the number
of testing classes being odd. The key point is that the
previous splits from published works have a higher
proportion of TUCs than ours, and thus we expect
that ZSL class accuracies will be higher as a result of
using more overlapping classes in our ZSL test sets.
Table 4 shows the results as the mean of per-class av-
erage accuracies when using deep feature (C3D) and
non-deep feature (IDT) along with different semantic
representations under previous splits and our splits for
both ZSL datasets.
As can be seen in Table 4, there is no significant
difference between previous splits and our splits in
UCF101 when we use the baseline IDT for visual rep-
resentation. This is as expected as the concept of over-
lapping classes is not relevant here. In contrast, when
using pre-trained model C3D, ZSL accuracies are
higher using our splits than previous research splits,
showing an accuracy increases of 11.22% and 3.70%
for evaluating attributes and Word2Vec in UCF101,
respectively, along with the 14.6% rise of the number
of OUCs in our testing sets against previous splits.
Similarly for HMDB51, no significant difference
is found between previous splits and our splits when
using IDT as expected. When using C3D pre-trained
Fairer Evaluation of Zero Shot Action Recognition in Videos
213

model, there is 10.75% boost gained for Word2Vec
with the 15.33% rise of the number of OUCs in
our testing sets from HMDB51 compared to previ-
ous splits. Summarising the results from experimen-
tal configuration 5, the greater the proportion of over-
lapping classes, the higher the ZSL class accuracies
obtained, supporting the case that overlapping classes
between pre-training and ZSL test sets are distorting
ZSL results.
All our discussions so far have focused on the
overlapping of ZSL test classes and pre-trained
datasets as an issue. And indeed, the lack of al-
lowance for this in evaluation results is an issue due
to the unrecognised inflation of zero-shot capabilities.
A counter-intuitive point to consider is that better ac-
curacies for ’unseen’ overlapping classes may high-
light opportunities. If we can boost accuracies via the
embedded knowledge in our pre-trained model, we
can consciously factor suitable knowledge-rich pre-
trained models into ZSL frameworks in order to pro-
vide a stronger basis for supporting the zero-shot case.
6 CONCLUSION
We have examined the extent and evaluation impact
of zero-shot ’unseen’ classes appearing in underlying
pre-trained models for feature representation in ZSL
human action recognition. Our work covered four
leading ZSL techniques for the two benchmark ZSL
datasets in the field: UCF101 and HMDB51. Three
widely used pre-trained models were tested: C3D,
I3D and 3D-ResNet. From the overall perspective,
our results showed a gain to overlapping classes for
the UCF101 dataset from 17.84% up to 51.94% by
using attribute, and a gain from 10.14% up to 39.21%
by using Word2Vec. Also, we note a less conclusive
pattern for HMDB51 with lower gains for the overlap-
ping classes in the case of HMDB51 with Sports-1M
(the gains from 5.75% up to 10.36%). For HMDB51
with Kinetics-400, some ZSL methods showed no
overlap gain, which may be linked to the noisy and
complex natures of the instances. We publish the
tagged version of the two benchmark ZSL datasets
for use by researchers in the field who wish to avoid
breaking the premise of ZSL.
As future work, we aim to focus on the task of
generalised zero-shot learning (GZSL), which pro-
vides an additional challenging of including both seen
and unseen classes in the ZSL test stage - a chal-
lenging problem of predictions biased towards seen
classes. We also highlight an alternative view of the
work here - the choice of suitable pre-trained models
could support the planned boosting of zero-shot ac-
curacies if carried out in a transparent and deliberate
way.
ACKNOWLEDGEMENTS
This project is funded under the Fiosraigh Scholarship
of Technological University Dublin.
REFERENCES
Akata, Z., Perronnin, F., Harchaoui, Z., and Schmid, C.
(2013). Label-embedding for attribute-based classi-
fication. In Proceedings of CVPR, pages 819–826.
Akata, Z., Perronnin, F., Harchaoui, Z., and Schmid, C.
(2015). Label-embedding for image classification.
IEEE transactions on pattern analysis and machine
intelligence, 38(7):1425–1438.
Brattoli, B., Tighe, J., Zhdanov, F., Perona, P., and
Chalupka, K. (2020). Rethinking zero-shot video clas-
sification: End-to-end training for realistic applica-
tions. In Proceedings of IEEE CVPR, pages 4613–
4623.
Carreira, J. and Zisserman, A. (2017). Quo vadis, action
recognition? a new model and the kinetics dataset.
In proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 6299–6308.
Changpinyo, S., Chao, W.-L., Gong, B., and Sha, F. (2016).
Synthesized classifiers for zero-shot learning. In Pro-
ceedings of CVPR, pages 5327–5336.
Feichtenhofer, C., Pinz, A., and Zisserman, A. (2016). Con-
volutional two-stream network fusion for video action
recognition. In Proceedings of CVPR, pages 1933–
1941.
Frome, A., Corrado, G. S., Shlens, J., Bengio, S., Dean, J.,
Ranzato, M., and Mikolov, T. (2013). Devise: A deep
visual-semantic embedding model. In Advances in
neural information processing systems, pages 2121–
2129.
Gan, C., Lin, M., Yang, Y., Zhuang, Y., and Hauptmann,
A. G. (2015). Exploring semantic inter-class relation-
ships (sir) for zero-shot action recognition. In Pro-
ceedings of the National Conference on Artificial In-
telligence.
Gao, J., Zhang, T., and Xu, C. (2019). I know the relation-
ships: Zero-shot action recognition via two-stream
graph convolutional networks and knowledge graphs.
In Proceedings of the AAAI, volume 33, pages 8303–
8311.
Guadarrama, S., Krishnamoorthy, N., Malkarnenkar, G.,
Venugopalan, S., Mooney, R., Darrell, T., and Saenko,
K. (2013). Youtube2text: Recognizing and describ-
ing arbitrary activities using semantic hierarchies and
zero-shot recognition. In Proceedings of the IEEE
ICCV, pages 2712–2719.
Hara, K., Kataoka, H., and Satoh, Y. (2018). Can spatiotem-
poral 3d cnns retrace the history of 2d cnns and ima-
genet? In Proceedings of CVPR, pages 6546–6555.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
214

Jain, M., van Gemert, J. C., Mensink, T., and Snoek, C. G.
(2015). Objects2action: Classifying and localizing ac-
tions without any video example. In Proceedings of
the IEEE ICCV, pages 4588–4596.
Junior, V. L. E., Pedrini, H., and Menotti, D. (2019). Zero-
shot action recognition in videos: A survey. arXiv
preprint arXiv:1909.06423.
Karpathy, A., Toderici, G., Shetty, S., Leung, T., Suk-
thankar, R., and Fei-Fei, L. (2014). Large-scale video
classification with convolutional neural networks. In
Proceedings of IEEE CVPR, pages 1725–1732.
Kuehne, H., Jhuang, H., Garrote, E., Poggio, T., and Serre,
T. (2011). Hmdb: a large video database for hu-
man motion recognition. In ICCV, pages 2556–2563.
IEEE.
Liu, H., Yao, L., Zheng, Q., Luo, M., Zhao, H., and Lyu, Y.
(2020). Dual-stream generative adversarial networks
for distributionally robust zero-shot learning. Infor-
mation Sciences, 519:407–422.
Liu, J., Kuipers, B., and Savarese, S. (2011). Recognizing
human actions by attributes. In CVPR 2011, pages
3337–3344. IEEE.
Liu, K., Liu, W., Ma, H., Huang, W., and Dong, X. (2019).
Generalized zero-shot learning for action recognition
with web-scale video data. WWW, 22(2):807–824.
Mandal, D., Narayan, S., Dwivedi, S. K., Gupta, V.,
Ahmed, S., Khan, F. S., and Shao, L. (2019). Out-of-
distribution detection for generalized zero-shot action
recognition. In Proceedings of CVPR, pages 9985–
9993.
Mikolov, T., Sutskever, I., Chen, K., Corrado, G. S., and
Dean, J. (2013). Distributed representations of words
and phrases and their compositionality. In Advances in
neural information processing systems, pages 3111–
3119.
Mishra, A., Pandey, A., and Murthy, H. A. (2020). Zero-
shot learning for action recognition using synthesized
features. Neurocomputing.
Mishra, A., Verma, V. K., Reddy, M. S. K., Arulkumar, S.,
Rai, P., and Mittal, A. (2018). A generative approach
to zero-shot and few-shot action recognition. In 2018
IEEE Winter Conference on WACV, pages 372–380.
IEEE.
Narayan, S., Gupta, A., Khan, F. S., Snoek, C. G., and
Shao, L. (2020). Latent embedding feedback and dis-
criminative features for zero-shot classification. arXiv
preprint arXiv:2003.07833.
Norouzi, M., Mikolov, T., Bengio, S., Singer, Y., Shlens,
J., Frome, A., Corrado, G. S., and Dean, J. (2013).
Zero-shot learning by convex combination of seman-
tic embeddings. arXiv preprint arXiv:1312.5650.
Palatucci, M., Pomerleau, D., Hinton, G. E., and Mitchell,
T. M. (2009). Zero-shot learning with semantic output
codes. In Advances in NIPS, pages 1410–1418.
Piergiovanni, A. and Ryoo, M. S. (2018). Learning shared
multimodal embeddings with unpaired data. CoRR.
Qin, J., Liu, L., Shao, L., Shen, F., Ni, B., Chen, J., and
Wang, Y. (2017). Zero-shot action recognition with
error-correcting output codes. In Proceedings of the
IEEE Conference on CVPR, pages 2833–2842.
Roitberg, A., Martinez, M., Haurilet, M., and Stiefelhagen,
R. (2018). Towards a fair evaluation of zero-shot ac-
tion recognition using external data. In ECCV, pages
0–0.
Simonyan, K. and Zisserman, A. (2014). Two-stream con-
volutional networks for action recognition in videos.
In Advances in NIPS, pages 568–576.
Soomro, K., Zamir, A. R., and Shah, M. (2012). Ucf101:
A dataset of 101 human actions classes from videos in
the wild. arXiv preprint arXiv:1212.0402.
Tian, Y., Kong, Y., Ruan, Q., An, G., and Fu, Y. (2019).
Aligned dynamic-preserving embedding for zero-shot
action recognition. IEEE Transactions on Circuits and
Systems for Video Technology.
Tran, D., Bourdev, L., Fergus, R., Torresani, L., and Paluri,
M. (2015). Learning spatiotemporal features with 3d
convolutional networks. In ICCV, pages 4489–4497.
Wang, H. and Schmid, C. (2013). Action recognition with
improved trajectories. In Proceedings of IEEE ICCV,
pages 3551–3558.
Wang, Q. and Chen, K. (2017a). Alternative semantic rep-
resentations for zero-shot human action recognition.
In Joint European Conference on Machine Learning
and Knowledge Discovery in Databases, pages 87–
102. Springer.
Wang, Q. and Chen, K. (2017b). Multi-label zero-shot
human action recognition via joint latent embedding.
arXiv preprint arXiv:1709.05107.
Wang, Q. and Chen, K. (2017c). Zero-shot visual recog-
nition via bidirectional latent embedding. IJCV,
124(3):356–383.
Xian, Y., Akata, Z., Sharma, G., Nguyen, Q., Hein, M., and
Schiele, B. (2016). Latent embeddings for zero-shot
classification. In Proceedings of CVPR, pages 69–77.
Xian, Y., Schiele, B., and Akata, Z. (2017). Zero-shot
learning-the good, the bad and the ugly. In Proceed-
ings of the IEEE Conference on CVPR, pages 4582–
4591.
Xu, X., Hospedales, T., and Gong, S. (2015). Semantic
embedding space for zero-shot action recognition. In
2015 IEEE ICIP, pages 63–67. IEEE.
Xu, X., Hospedales, T., and Gong, S. (2017). Transductive
zero-shot action recognition by word-vector embed-
ding. IJCV, 123(3):309–333.
Xu, X., Hospedales, T. M., and Gong, S. (2016). Multi-
task zero-shot action recognition with prioritised data
augmentation. In ECCV, pages 343–359. Springer.
Zhang, B., Hu, H., and Sha, F. (2018). Cross-modal and hi-
erarchical modeling of video and text. In Proceedings
of ECCV, pages 374–390.
Zhang, C. and Peng, Y. (2018). Visual data synthesis via
gan for zero-shot video classification. arXiv preprint
arXiv:1804.10073.
Zhang, Z. and Saligrama, V. (2016). Zero-shot learning via
joint latent similarity embedding. In proceedings of
CVPR, pages 6034–6042.
Zhu, Y., Long, Y., Guan, Y., Newsam, S., and Shao, L.
(2018). Towards universal representation for unseen
action recognition. In Proceedings of CVPR, pages
9436–9445.
Fairer Evaluation of Zero Shot Action Recognition in Videos
215
