
Segment My Object: A Pipeline to Extract Segmented Objects in Images
based on Labels or Bounding Boxes
Robin Del
´
earde
1,2 a
, Camille Kurtz
1 b
, Philippe Dejean
2
and Laurent Wendling
1 c
1
LIPADE, Universit
´
e de Paris, France
2
Magellium, Artal Group, Toulouse, France
Keywords:
Segmentation with Test Clues, Weakly-supervised Segmentation, Region Proposal, Knowledge Transfer.
Abstract:
We propose a pipeline (SegMyO – Segment my object) to automatically extract segmented objects in images
based on given labels and / or bounding boxes. When providing the expected label, our system looks for the
closest label in the list of outputs, using a measure of semantic similarity. And when providing the bounding
box, it looks for the output object with the best coverage, based on several geometric criteria. Associated with
a semantic segmentation model trained on a similar dataset, or a good region proposal algorithm, this pipeline
provides a simple solution to segment efficiently a dataset without requiring specific training, but also to the
problem of weakly-supervised segmentation. This is particularly useful to segment public datasets available
with weak object annotations (e.g., bounding boxes and labels from a detection, labels from a caption) coming
from an algorithm or from manual annotation. An experimental study conducted on the PASCAL VOC 2012
dataset shows that these simple criteria embedded in SegMyO allow to select the proposal with the best IoU
score in most cases, and so to get the best of the pre-segmentation.
1 INTRODUCTION
Segmentation is a challenging task in image analy-
sis for decades, from image processing with solutions
based on contours detection and pixel regions, to ma-
chine learning with (deep) models trained on large
sets of annotated images. In fact, segmented images
are useful for many high-level computer vision tasks,
since they provide a precise delineation of the objects
appearing in the scene, or of the structural parts of an
object. This may further allow to compute relevant
descriptors for these objects or parts, describing their
texture, shape, pose or even spatial configuration.
Originally, image segmentation was the task of
partitioning the image content into homogeneous re-
gions, by assigning a region to each pixel. Now it
is often used as semantic segmentation (also known
as “image parsing”), aiming to find the best label for
the region or the pixel. The outputs are called “seg-
ments” and are made of a label and a set of pixels of
the image, which can be represented as a “segmenta-
tion mask”. It differs from classical segmentation
a
https://orcid.org/0000-0001-6628-7778
b
https://orcid.org/0000-0001-9254-7537
c
https://orcid.org/0000-0003-1091-5995
and region proposal where the output is only a set of
regions. A variant is instance segmentation, where
different instances of the same class are expected to
be output into different segments.
In parallel, object segmentation is the task of ex-
tracting an object from its background. It can be seen
as the specific case of an image containing only one
object and background, and the same methods can be
used. But specific approaches also exist for this task,
assuming for example that there is only one object in
the image. Other object priors can be exploited, like
its position (e.g., at the center), extent (e.g., its bound-
ing box), etc. Solutions relying on bounding box and
labels are detailed in the following.
Semantic segmentation appeared with the rise of
(deep) machine learning, with CNN models like R-
CNN or FCN. It relies on supervision with annota-
tions at the pixel level, which is really tedious to ob-
tain on large datasets. Thus, several datasets have
been made available, like the well-known PASCAL
VOC or COCO, but they are still limited to some spe-
cific applications. Beside that, “collecting bounding
boxes around each object in the image is 15 times
faster than labeling images at the pixel level” (Lin
et al., 2014). In this context, weakly-supervised so-
lutions appeared as a cheap alternative, using only
618
Deléarde, R., Kurtz, C., Dejean, P. and Wendling, L.
Segment My Object: A Pipeline to Extract Segmented Objects in Images based on Labels or Bounding Boxes.
DOI: 10.5220/0010324006180625
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
618-625
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

weak annotations like bounding boxes or image cap-
tions for the training. And when they are available
at the inference step, these annotations can be used
to help the segmentation, what we call “segmenta-
tion with test clues”. This results in tasks with vari-
able difficulty and specific solutions. Finally, it can
be noticed that segmentation is closely related to re-
gion proposal, which consists in extracting coherent
regions in the image.
Benefiting from the development of huge panop-
tic datasets, it is now possible to find numerous pre-
trained segmentation models and to use them directly
on new data with good performance, for many appli-
cations. The output can be a segmented image with
different levels, or several candidate masks with pos-
sible overlap. In both cases, it might be interesting
to automatically extract a particular object among all
the output segments, given some clues on it, so as to
integrate this step into a larger process. This is the
problem we consider here. Weakly-supervised seg-
mentation is a natural extension of this problem, since
a simple solution consists in using segment proposal
and selection to generate pixel-level supervision from
weakly-annotated images.
In this article, we propose complementary criteria
to extract a particular output among several propos-
als, based on its bounding box and / or its label. Con-
cerning the bounding box, we use a mix of geomet-
ric criteria on the covering of the targeted bounding
box by each proposal. And concerning the label, we
use semantic information to find the closest to the re-
searched one. We propose to use this selection in as-
sociation with a segmentation model to generate the
proposals, leading to a complete pipeline to segment
datasets with weak object annotations. Moreover, it
can be easily integrated as the first step of a weakly-
supervised segmentation framework, so as to segment
new data without annotation at inference step, using
the weak annotations for the training.
Thus, the main contributions of this paper are:
• a proposition of geometric and semantic criteria
to select an object in the image content, given its
label and / or bounding box;
• an integration of these criteria into a pipeline
(SegMyO – Segment my object) aiming to seg-
ment any dataset from weak annotations (labels
and / or bounding boxes);
• an insight of how to use these criteria for weakly-
supervised segmentation.
The article is organized as it follows. Section 2
reviews some related works. Section 3 presents our
methodological contribution. In Section 4, we pro-
pose an experimental study. Finally, conclusions and
perspectives of this work are provided in Section 5.
2 RELATED WORKS
2.1 Segmentation Transfer
Modern segmentation models, whatever their supervi-
sion level, are trained on representative data, making
them data/task-dependent, with variable generaliza-
tion capacity. Using such a model for another dataset
or another task is possible, but it requires some adap-
tations to make it efficient, by exploiting the knowl-
edge available on the new test case. This general
solution called “transfer learning” is known as “do-
main adaptation” when the task is modified, and “fine-
tuning” when the model is just adapted to new classes
(by modifying the last layer) and re-trained on new
data. Fine-tuning is much used for object detection
and recognition, but much less for semantic segmen-
tation, which requires dense annotations.
In this context, (Hong et al., 2016) proposes to
use transfer learning for weakly-supervised semantic
segmentation, by using a encoder-decoder with a vi-
sual attention model to transfer knowledge from cat-
egories with strong annotations to unseen categories
with weak annotations. (Sun et al., 2019) proposes a
solution to benefit both from real and synthetic data,
by using jointly with the segmentation network a sec-
ond network dedicated to learn the similarity of syn-
thetic pixels to real ones. Furthermore, (Pascal et al.,
2019) proposes to use semantic similarity, by re-using
the last layer of the original network when the labels
are semantically close. It is only evaluated on a clas-
sification task, but the idea can be used for segmen-
tation too. We consider this approach here, but only
as a post-processing since we do not have access to
pixel-level annotations to train a new model.
2.2 Segmentation with Test Clues
We do not use the expression of “weakly-supervised
segmentation” for this task because it usually refers to
the training step only, with solutions based on weakly-
supervised learning, while here we consider that weak
annotations are available at the inference step. Actu-
ally this is often the first step of weakly-supervised
segmentation solutions, which exploit weak annota-
tions to generate a pixel-level ground truth that is used
to train a common segmentation model, in the same
way as self-supervised methods.
Two main categories of approaches co-exist: those
exploiting the bounding box of the object, and those
exploiting image-level labels. Typically, these clues
come from a first detection or image captioning step,
or from manual annotations. Few solutions ex-
ploit a combination of image-level labels and bound-
Segment My Object: A Pipeline to Extract Segmented Objects in Images based on Labels or Bounding Boxes
619

ing boxes: (Papandreou et al., 2015) can use both,
in function of what is available, while (Li et al.,
2018) uses bounding-boxes for objects of interest and
image-level labels for the background (or “stuff” ob-
jects). But to our knowledge and surprisingly, no so-
lution exploits the combination of a bounding-box di-
rectly with the label of the considered object.
Object Segmentation with a Bounding Box.
Knowing the object bounding box is obviously an in-
teresting clue to infer its real extent at the pixel level,
even more if it is tight around the object, i.e., if it con-
tains the entire object and no more other stuff than
necessary. The most simple case is object / back-
ground segmentation, where the object is alone in the
image or the bounding box. But in more difficult
cases, even a tight bounding box may contain several
objects instead of simple background, and choosing
the best one is tricky.
While former solutions used to rely on higher user
interaction, like selecting points or scribbles inside
and outside the object, GrabCut (Rother et al., 2004)
was the first solution to rely only on a bounding box.
It is based on two appearance models, for the back-
ground and the foreground, and on iterative graph-cut
to get the final segmentation. Its efficiency made it
popular, and it is still used in several state-of-the-art
solutions, with some variations like (Lempitsky et al.,
2009) that exploits the tightness prior by adding con-
straints into the global energy minimization.
Another common solution is to generate mul-
tiple hypothesis segments, either with an over-
segmentation model or region proposal, and to select
or generate the final output with a voting or com-
bination scheme. In the literature, most solutions
are based on region proposal, especially in weakly-
supervised frameworks where it is a first step used to
generate pixel-level ground truth. For instance, Box-
Sup (Dai et al., 2015) is based on Multiscale Com-
binatorial Grouping (MCG) (Arbel
´
aez et al., 2014)
and evaluates several other solutions. (Khoreva et al.,
2017) is based on MCG too, but it combines it with
GrabCut, and allows to handle several instances of
the same object. As for over-segmentation, it is used
in (Chen et al., 2012) solution for object / back-
ground segmentation, with an adaptive Mean-Shift
algorithm. In our solution, we suggest to use an
over-segmentation made of a full segmentation model
trained on a similar dataset, using for instance the ef-
ficient Mask R-CNN (He et al., 2017).
Other tracks were also explored, particularly for
weakly-supervised segmentation. (Papandreou et al.,
2015) constrains its CRF to consider the center area
of the bounding box (a percentage of pixels within the
box) as foreground, and the pixels outside the bound-
ing box as background. As for it, (Hsu et al., 2019)
uses a Multiple Instance Learning (MIL) framework,
and integrates the tightness prior on the bounding box.
More recently, BB-UNet (Jurdi et al., 2020), which is
based on U-Net, exploits shape priors by introducing
a novel convolution layer, to segment medical images.
Image Segmentation with Image-level Labels.
Many solutions exploiting image-level labels exist
in the literature, particularly for weakly-supervised
segmentation (Kolesnikov and Lampert, 2016; Zhou
et al., 2018; Ahn et al., 2019; Wang et al., 2020).
These solutions are usually based on class-activation
maps (CAM) (Zhou et al., 2016) and visual attention
to generate the pixel-level ground-truth.
The approach of (Guillaumin et al., 2014) can be
mentioned here too, since its goal is to segment a
complete dataset containing weak annotations like us
(ImageNet in their case), but with a totally different
idea. It is based on an original greedy approach, by
progressively segment the objects whose labels are
semantically close to the already segmented ones, us-
ing two appearance models for foreground and back-
ground pixels. The model is initialized with PAS-
CAL VOC pixel-level annotations, and also exploits
bounding boxes annotations when they are available.
3 SegMyO PIPELINE
3.1 Workflow Description
We propose a solution to the task of object segmenta-
tion based on a bounding box and / or label test clue,
on an image containing several objects and not only
“stuff” background. It relies on a two-stage pipeline
called SegMyO (Segment My Object): first a set of
regions is extracted with a classical (instance) image
segmentation solution, or with region proposal, and
then the best output is selected for the given bound-
ing box, and label if using semantic segmentation, ac-
cording to the criteria described in Section 3.2.
Concerning the segmentation step, using a pre-
trained model supposes that the latter was trained on
objects and labels similar to the target ones. Yet, there
now exists good segmentation models pre-trained
on huge and varied datasets, for many applications.
Moreover, so as to extend the training to other similar
labels, we propose to use semantic similarity to find a
similar label in the model ones. This can also be seen
as a transfer of a model trained on a set of labels to
another set not containing exactly the same labels, as
it is done in (Pascal et al., 2019).
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
620

(a) (b) (c) (d)
Figure 1: Segmentation of an image from the PASCAL VOC 2012 validation set: (a) ground truth instance segmentation (3
instances of the class “aeroplane”), (b) input image and bounding box, given with the label “aeroplane”, (c) output masks
from Mask R-CNN, restricted to those overlapping to the bounding box (12 objects), (d) mask selected by SegMyO for the
given bounding box and label (recognized as “airplane”).
Our system takes as input:
• an image I of dimension W ×H, with W the width
and H the height of the image;
• a bounding box B around a specific object, defined
by the spatial coordinates of its upper left cor-
ner (x
1
,y
1
) and bottom right corner (x
2
,y
2
), with
(x
1
,y
1
) and (x
2
,y
2
) ∈ [1,W ] × [1,H];
• a semantic label l ∈ L
target
of an object appearing
in the image (e.g., L
target
= {Man, Animal,.. .});
• a segmentation of I made of a set of regions
{R
i
}
i=1..N
possibly overlapping, detected with a
confidence score r
i
, each region potentially be-
ing endowed with a semantic label l
i
∈ L
init
(e.g., L
init
= {Person, Automobile,.. .}).
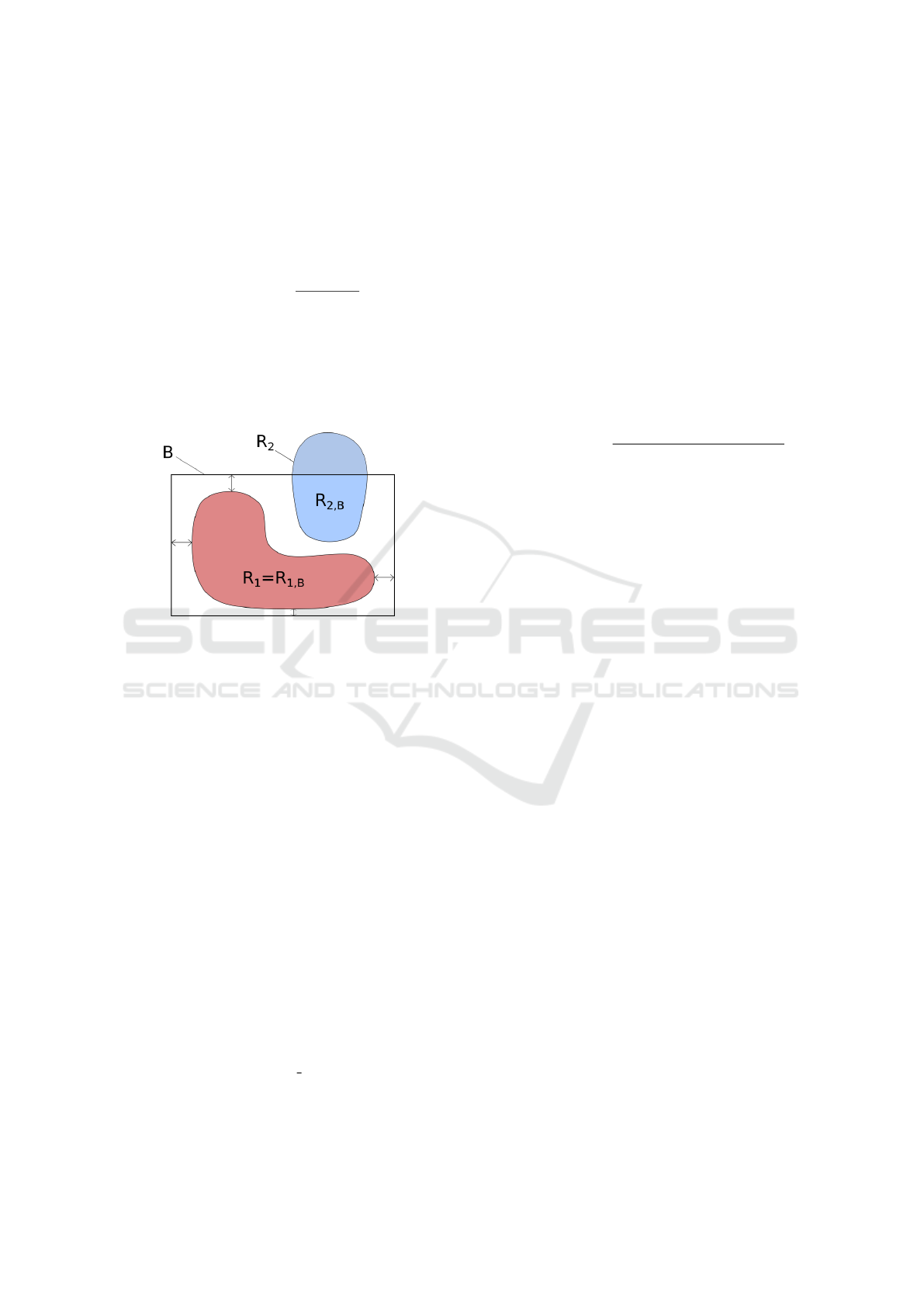
In the sequel, we note R
i,B
= R
i
∩ B the restriction of
the region R
i
to the bounding box B, as it is illustrated
on Figure 2.
For each candidate region R
i
, a score is computed
from its covering of the bounding box, and from the
semantic similarity between the expected label l and
the predicted label l
i
if using semantic segmentation,
thanks to the criteria defined in Section 3.2. Then the
system outputs the region with the best score among
all the candidates as the correct segmentation of the
object, as shown on Figure 1. Another threshold can
be used here to filter low scores, where it may be bet-
ter to use another solution like GrabCut or just filling
the bounding box (or a part of it).
This pipeline can be exploited for two other main
use cases:
• in full image segmentation aided by bounding box
and / or labels priors (with labels either for each
bounding box or at image-level), by considering
each object separately. This supposes to have ac-
cess to those weak annotations for all objects of
interest in the image, and requires to deal with
possible overlap between objects.
• as the first step of a weakly-supervised segmenta-
tion method, by using the selected region to train
a supervised segmentation model, as it is done in
state-of-the-art solutions. This approach is simi-
lar to BoxSup (Dai et al., 2015), that uses region
proposal to extract ground truth masks and selects
the best one according to a similar criterion in its
objective function (see criterion C3, Section 3.2).
An implementation of the proposed pipeline is avail-
able at: https://github.com/RobinDelearde/SegMyO.
3.2 Selection Criteria
Here different criteria are proposed to automatically
select the best candidate segment: geometric criteria
are dedicated to the bounding box clue, while a se-
mantic criterion is dedicated to the label. All criteria
are in the range [0,1].
3.2.1 Bounding Box Geometric Criteria
First, two criteria aiming at exploiting the tightness
prior on the bounding box are considered, as they are
basic necessary and universal criteria. They rely on
the hypothesis that the bounding box is tight around
the object, i.e., that it contains all the object and no
more other stuff (e.g., background) than necessary.
Thus, the tighter the bounding box is, the better the
segmentation will be. This tightness prior is used in
(Lempitsky et al., 2009; Hsu et al., 2019) and can
also be derived from the background and object ex-
tent clues of (Khoreva et al., 2017).
The measures that we propose are based on:
C1. the maximum relative distance of the region to the
edges of the bounding box, as it should be close
to zero for all 4 edges:
c
1
(R
i
,B) = 1 − max
d
x
(R
i,B
,B)
W
,
d
y
(R
i,B
,B)
H
C2. the relative extent of the region, i.e., the part of the
region that is in the bounding box, assuming that
all the object must be in the bounding box:
c
2
(R
i
,B) =
area(R
i,B
)
area(R
i
)
Segment My Object: A Pipeline to Extract Segmented Objects in Images based on Labels or Bounding Boxes
621
Other optional criteria can be defined to refine the
segmentation step, depending on the a priori knowl-
edge about the shape of the objects, like:
C3. the area covering of the bounding box, which in-
tends to give more weight to large objects. This is
the criterion used in BoxSup (Dai et al., 2015):
c
3
(R
i
,B) =
area(R
i,B
)
area(B)
C4. the presence at the center of the bounding box, for
“barycentric” objects or to avoid objects present
only on the edges;
C5. the covering of all x and y of the bounding box, to
avoid disjoint objects.
Figure 2: Two candidate regions in a same bounding box.
3.2.2 Semantic Criterion
When using semantic segmentation, each segment is
assigned a label from the set of labels learned by the
model. So knowing the label of the item we look for
is useful, but it may not be part of this set. In fact,
a major problem lies in the specificity and the low
number of classes in most of the academic standard
datasets published on the Internet. The segmentation
models pre-trained on these datasets are thus limited
to the segmentation of existing object classes in these
datasets. For example, if the “cat” class is learned in
the initial dataset, it will be difficult to provide as an
input label “bobcat” in the target dataset. However the
“cat” segmentation model might be used to segment
a “bobcat” since these objects are visually close and
semantically related. This is why we propose to use
semantic label matching to extend the vocabulary to
labels outside the set.
To do so, we use natural language processing tools
to compute a semantic similarity c
sem
between the
predicted label l
i
and the expected label l, as:
c
sem
(l
i
,l) = semantic similarity(l
i
,l)
Two main approaches can be considered: similari-
ties between words in a taxonomy like WordNet, or
similarities between words embeddings learned on a
corpus, with a model like Word2Vec. However, this
requires that both labels are present in the vocabulary,
so it is necessary to take care of that when choosing
the model, or to perform manual corrections.
Several methods are available to compute the se-
mantic similarity in a taxonomy, like Rada, Resnik
or Li similarities, etc. Most of them are based either
on structural measures between concepts in the taxon-
omy (e.g., path length and depth), or on the Informa-
tion Content (IC). We suggest to use the wpath simi-
larity (Zhu and Iglesias, 2016), which combines both
approaches by using IC to weight the shortest path
length between concepts, and usually demonstrates
the best performance. This measure is defined as:
c
sem,wpath
(l
i
,l) =
1
1 + length(l
i
,l) ∗ k
IC(lcs(l
i
,l))
with lcs the least common subsumer, and k a parame-
ter indicating the contribution of the lcs’s IC.
3.3 Criteria Combination
A global criterion can be computed from all the pre-
vious criteria and from the segmentation confidence
score r
i
. It can be made simply with a weighted sum
of the different scores. As mentioned before, the cri-
teria C1 and C2 are particularly important, so we sug-
gest to give a more important weight to them, whereas
the criteria C3, C4 and C5 are more questionable, so
they should have a smaller weight unless we have
some prior knowledge about the shape of objects in
the bounding boxes. The semantic criterion is also
particularly significant, so we suggest to give an im-
portant weight to it also.
In our experiments, we used the following score:
score
1
=
(r
i
+ 2 ∗ c
1
+ 2 ∗ c
2
+ c
3
+ 4 ∗ c
sem
)/10
when l
i
∈ L
init
and l ∈ L
target
(r
i
+ 2 ∗ c
1
+ 2 ∗ c
2
+ c
3
)/6
otherwise
To go even further, the criteria C1 and C2 are neces-
sary conditions, so we suggest to keep only the mini-
mal value of C1, C2 and the global score, with:
score
2
= min(c
1
,c
2
,score
1
)
Another solution would be to learn the weights to
get the best fusion of the different criteria. However
we experimentally found that the proposed combina-
tion was already satisfactory (see Section 4).
This is worth mentioning that all these criteria
might be impacted if several instances of the object
are present in the image and the segmentation is not
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
622

able to separate them. So they should be used only
with instance segmentation, or with datasets includ-
ing only one instance of each object. It is also inter-
esting to note that these criteria can be computed on
the masks with “fuzzy” raw scores (in [0,1]) rather
than on binary masks, so as to take into account the
score for each pixel in the computation. This is what
we did for the criteria C2 and C3 in our experiments.
4 EXPERIMENTS
4.1 Data and Experimental Protocol
We evaluate our pipeline on the PASCAL VOC 2012
segmentation dataset (Everingham et al., 2010), using
the validation set. It is made of 1 449 images, contain-
ing 3 427 objects from 20 classes in the segmentation
masks. As a pre-segmentation model to generate the
candidate regions, we used Mask R-CNN ResNet-50
FPN torchvision model
1
(He et al., 2017), which was
trained on COCO 2017 (Lin et al., 2014). This other
dataset is made of 80 classes, including the 20 classes
from PASCAL VOC, but sometimes with a different
name, like “couch” in COCO which is “sofa” in PAS-
CAL VOC, or “tv” vs. “tv monitor”.
The output of the pre-segmentation is a list of ob-
jects proposals made of a label, a segmentation score
and a mask with values in [0,1]. We only keep the
proposals with a segmentation score above a thresh-
old (set to 0.25). We take this list as input of our se-
lection process, and return the best proposal for each
object, given its bounding box and its label, according
to our criteria. We also test a region proposal solu-
tion with Multiscale Combinatorial Grouping (MCG)
(Arbel
´
aez et al., 2014) to see if it can be efficient, by
using the pre-computed proposals available online
2
.
We evaluate each criterion individually and the
two combined scores to compare their performance.
For the semantic similarity, we used WordNet tax-
onomy and wpath method (Zhu and Iglesias, 2016),
with sematch python framework
3
. As a segmentation
evaluation metric, we compute the intersection-over-
union (IoU) score for each object by using the in-
stance segmentation annotations provided for the val-
idation set, and after a binarization of the image (we
used a threshold of 0.3). We repeat this process for
each object with such annotations, i.e., for the 3 427
1
https://pytorch.org/docs/stable/torchvision/models.
html
2
https://www2.eecs.berkeley.edu/Research/Projects/
CS/vision/grouping/mcg/
3
https://github.com/gsi-upm/sematch
objects of this dataset, and report the mean over all
objects as mIoU
ob j
in Table 1.
So as to compare to other methods (weakly-
supervised or fully-supervised), we also compute the
mean IoU for each class of objects, after transforming
our outputs to conform to image segmentation. To do
so, we added a step of fusion of the individual selected
segments, by inserting them in the output image from
the largest to the smallest, so as to deal with overlap-
ping segments. We report as mIoU the mean over all
the classes, including the background class. We also
compare to GrabCut (Rother et al., 2004) as a state-
of-the-art unsupervised solution for our task.
4.2 Results and Discussion
The results of our experiments on segmentation with
test clues are reported in Table 1, for several solutions
and various selection criteria, while Table 2 provides
comparisons with some recent weakly and fully su-
pervised models from the literature. For each solu-
tion, we indicate either the level of the test clues avail-
able at the inference step in the first case, or the level
of annotations used to train the model in the second
case. It can be “pixels” when pixel-level annotations
are used, “caption” when image-level labels are con-
sidered, and “b.box” or “b.box+labels” for bounding
box level annotations.
In our tests (Table 1), we distinguish between to-
tally unsupervised solutions, i.e., not using any data
to elaborate the model, and solutions not using PAS-
CAL VOC train data but another similar dataset, here
COCO, in a transfer learning manner. As a low base-
line for the bounding box test clues, we use the solu-
tion to fill this one, totally or partially. The scores re-
ported (solution “filled b.box”) are obtained by filling
the bounding box at 90%, which gave a better score
than 80% or 100%. Concerning solutions based on
our pipeline with a pre-segmentation and output se-
lection, an upper bound baseline can also be obtained
for the output selection by using the IoU as crite-
rion instead of ours, which supposes to have access to
pixel-level annotations. Thus, this baseline allows to
get the best score for the considered pre-segmentation
model (solution SegMyO
mIoU
).
These results show that totally unsupervised seg-
mentation with test clues does not give satisfactory re-
sults, and that it cannot segment efficiently a dataset
despite the bounding box information. On the con-
trary, using a model pre-trained on another dataset
allows to reach a good performance, ranking be-
tween weakly-supervised and fully-supervised mod-
els, without training on the considered dataset. Then
it is possible to segment a dataset without a specific
Segment My Object: A Pipeline to Extract Segmented Objects in Images based on Labels or Bounding Boxes
623
training, by benefiting from pre-trained models and
test clues, with an appropriate use of these clues.
Table 1: Segmentation scores on PASCAL VOC validation
set, when testing with test clues, for unsupervised mod-
els and a model trained on another dataset (Mask R-CNN
trained on COCO) (mIoU: average over the 21 classes,
mIoU
ob j
: average over all the objects w/o background).
method test clues mIoU mIoU
ob j
unsupervised
filled b.box b.box 56.50% 53.16%
GrabCut (Rother et al., 2004) b.box 58.82% 44.29%
MCG + SegMyO
C3
b.box 47.64% 44.39%
MCG + SegMyO
mIoU
pixels 51.08% 47.50%
transfer learning (from COCO)
MR-CNN + SegMyO
mIoU
pixels 74.68% 70.67%
MR-CNN + SegMyO
C1
b.box 70.55% 65.04%
MR-CNN + SegMyO
C2
b.box 53.19% 51.95%
MR-CNN + SegMyO
C3
b.box 71.02% 66.85%
MR-CNN + SegMyO
sem
caption 68.71% 58.19%
MR-CNN + SegMyO
C3∗sem
b.box+label 73.16% 68.63%
MR-CNN + SegMyO
score1
b.box 73.08% 68.97%
MR-CNN + SegMyO
score2
b.box 73.04% 68.74%
MR-CNN + SegMyO
score1
b.box+label 73.62% 69.35%
MR-CNN + SegMyO
score2
b.box+label 73.30% 68.93%
MR-CNN+ SegMyO
score1
b.box+label 73.99% 69.88%
/ filled b.box
Table 2: Segmentation scores from the literature on PAS-
CAL VOC validation / test sets, models trained with PAS-
CAL VOC train data (mIoU averaged over the 21 classes).
method train data mIoU
val
mIoU
test
weakly-supervised
BoxSup (Dai et al., 2015) b.box 62.0% 64.2%
SEAM (Wang et al., 2020) caption 64.5% 65.7%
fully-supervised without additional data
ResNet-38 (Wu et al., 2019) pixels n.c. 82.5%
DeepLabv3+ (Chen et al., 2018) pixels 81.63% n.c.
fully-supervised with additional data (COCO)
ResNet-38 (Wu et al., 2019) pixels 80.84% 84.9%
DeepLabv3+ (Chen et al., 2018) pixels 84.56% 89.0%
Concerning the different proposed criteria (see
Section 3.2), they reach variable performance when
taken individually, with a good behaviour of the cri-
teria C3 and C1, and in a lower extent of the seman-
tic criterion (which shows an important gap between
the two computation modes of the mIoU). Combin-
ing several criteria allows to get closer to the upper
bound given by the mIoU, for instance by combining
the semantic criterion and criterion C3.
For the combined criteria score
1
and score
2
, we
evaluated both with the bounding box only and with
the bounding box + label. All results are quite similar,
but the differences allow to conclude on the interest
of each variation. Thus, we can infer that score
2
is
not better than score
1
on average, contrary to expec-
tations, showing also that the weights used in score
1
are quite adapted. More importantly, it can be no-
ticed that the gain provided by the label is not very
high, so that it is much better to annotate datasets with
bounding boxes only than with labels only. Finally, a
last solution is given by using score
1
and filling the
bounding box (at 90%) when the computed score is
below a threshold (set to 0.5), which reaches the best
performance, really close to the mIoU upper bound.
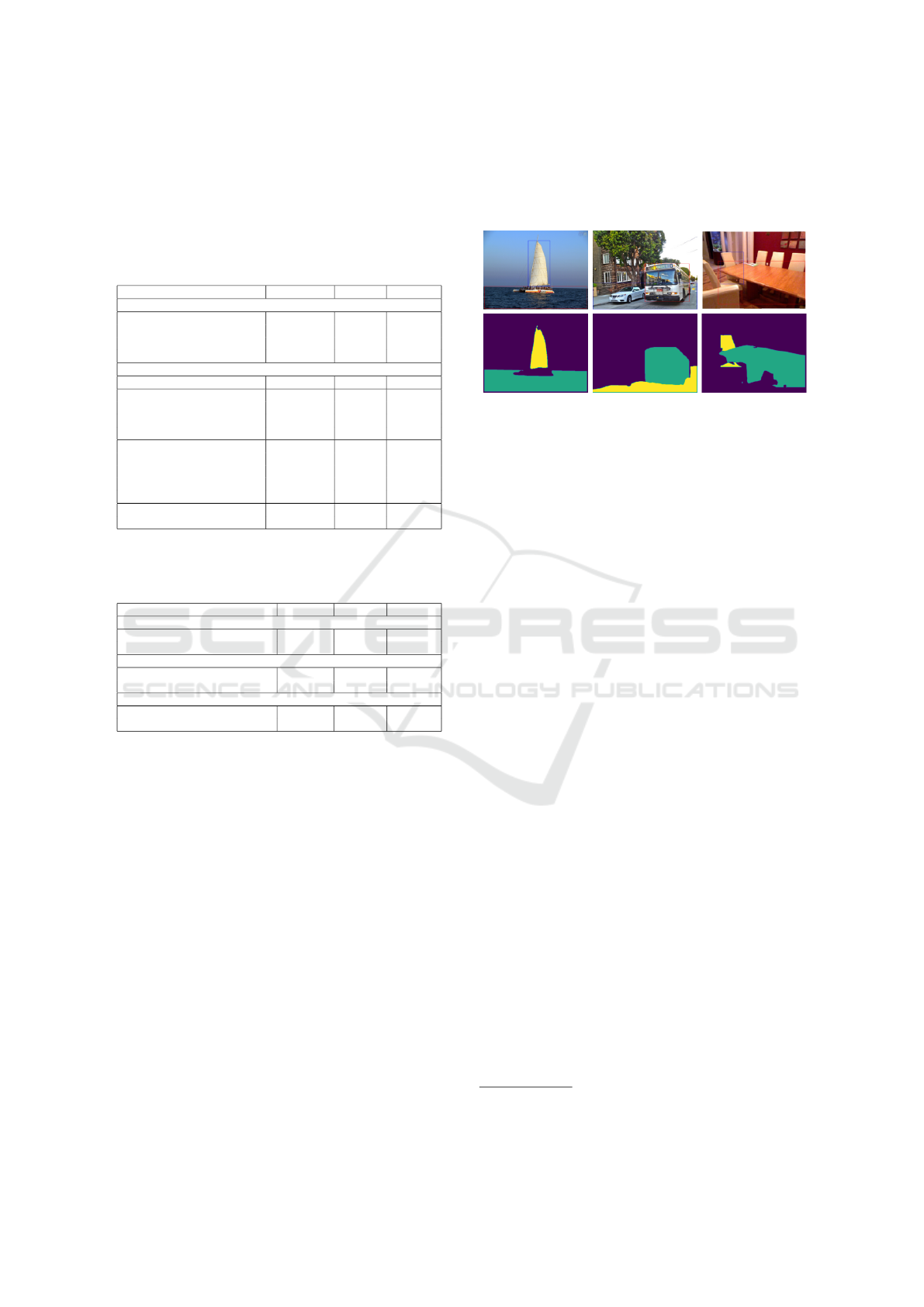
sail, water street, bus chair, table
tower, sea road, bus chair, table
Figure 3: Samples of segmentation outputs obtained on
SpatialSense, with HRNet trained on ADE20K and selec-
tion with SegMyO: (First line) input images + prior clues
(b.box+label); (Second line) selected segmented objects.
As an additional experiment, we used this pipeline
to segment SpatialSense (Yang et al., 2019), a dataset
containing annotations of spatial relations between
objects depicted by their bounding boxes. This
dataset is made of 2 162 images with persons, ani-
mals, everyday-life objects, but also stuff classes (like
“sky”, “ground”, “wall”...). As a pre-segmentation
model, we used a HRNet model trained on ADE20K
4
,
since this dataset contains similar classes, and HRNet
is one of the best models for segmentation, although
it doesn’t achieve instance segmentation by default.
Figure 3 presents some samples of the outputs ob-
tained. Such results highlight the interest of our
pipeline in a real case, since SpatialSense is provided
without any segmentation annotation, while such seg-
mented objects can be useful for various computer vi-
sion tasks, as the computation of relative position de-
scriptors between objects (Del
´
earde et al., 2021).
5 CONCLUSION
We introduced a turnkey pipeline (SegMyO) to auto-
matically extract segmented objects in images based
on given labels and / or bounding boxes. Ir relies on
simple criteria to select the best segment among sev-
eral proposals for a given object, by exploiting the
knowledge of its class or its bounding box, with se-
mantic similarity for the label and several geometric
measures for the bounding box. SegMyO allows to
easily and automatically segment and select any ob-
ject knowing its bounding box and / or its label, mak-
4
https://github.com/CSAILVision/
semantic-segmentation-pytorch
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
624

ing it a useful solution to segment a dataset without
requiring dense annotation or specific training. This is
also a promising improvement for weakly-supervised
segmentation frameworks.
As a perspective, we consider to push our exper-
iments further in order to assess more precisely the
complementarity of our criteria and optimize their ag-
gregation (using for example voting or learning strate-
gies), on other datasets of the literature, where the se-
mantic differences between the classes could be more
important. In this context, other criteria might also be
evaluated to take into account the specificity of each
dataset. Finally, we also plan to evaluate the impact of
embedding our criteria in weakly-supervised segmen-
tation schemes, where they can be easily integrated.
ACKNOWLEDGEMENTS
This work was carried out at the LIPADE and funded
by Magellium, with the support of the French Defense
Innovation Agency (AID).
REFERENCES
Ahn, J., Cho, S., and Kwak, S. (2019). Weakly supervised
learning of instance segmentation with inter-pixel re-
lations. In CVPR, pages 2209–2218.
Arbel
´
aez, P., Pont-Tuset, J., Barron, J. T., Marques, F., and
Malik, J. (2014). Multiscale combinatorial grouping.
In CVPR, pages 328–335.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sep-
arable convolution for semantic image segmentation.
In ECCV, pages 801–818.
Chen, Y., Chan, A. B., and Wang, G. (2012). Adaptive
figure-ground classification. In CVPR, pages 654–
661.
Dai, J., He, K., and Sun, J. (2015). Boxsup: Exploiting
bounding boxes to supervise convolutional networks
for semantic segmentation. In ICCV, pages 1635–
1643.
Del
´
earde, R., Kurtz, C., Dejean, P., and Wendling, L.
(2021). Force banner for the recognition of spatial
relations. In ICPR 2020, pages XX–XX.
Everingham, M., Van Gool, L., Williams, C. K., Winn,
J., and Zisserman, A. (2010). The PASCAL visual
object classes (VOC) challenge. Int J Comput Vis,
88(2):303–338.
Guillaumin, M., K
¨
uttel, D., and Ferrari, V. (2014). Imagenet
auto-annotation with segmentation propagation. Int J
Comput Vis, 110(3):328–348.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask R-CNN. In ICCV, pages 2961–2969.
Hong, S., Oh, J., Lee, H., and Han, B. (2016). Learn-
ing transferable knowledge for semantic segmentation
with deep convolutional neural network. In CVPR,
pages 3204–3212.
Hsu, C.-C., Hsu, K.-J., Tsai, C.-C., Lin, Y.-Y., and Chuang,
Y.-Y. (2019). Weakly supervised instance segmenta-
tion using the bounding box tightness prior. In NIPS,
pages 6586–6597.
Jurdi, R. E., Petitjean, C., Honeine, P., and Abdallah, F.
(2020). BB-UNet: U-Net with bounding box prior.
IEEE J Sel Top Signal Process.
Khoreva, A., Benenson, R., Hosang, J., Hein, M., and
Schiele, B. (2017). Simple does it: Weakly supervised
instance and semantic segmentation. In CVPR, pages
876–885.
Kolesnikov, A. and Lampert, C. H. (2016). Seed, expand
and constrain: Three principles for weakly-supervised
image segmentation. In ECCV, pages 695–711.
Lempitsky, V., Kohli, P., Rother, C., and Sharp, T. (2009).
Image segmentation with a bounding box prior. In
ICCV, pages 277–284.
Li, Q., Arnab, A., and Torr, P. H. (2018). Weakly-and semi-
supervised panoptic segmentation. In ECCV, pages
102–118.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Doll
´
ar, P., and Zitnick, C. L. (2014). Mi-
crosoft COCO: Common objects in context. In ECCV,
pages 740–755.
Papandreou, G., Chen, L.-C., Murphy, K. P., and Yuille,
A. L. (2015). Weakly-and semi-supervised learning
of a deep convolutional network for semantic image
segmentation. pages 1742–1750.
Pascal, L., Bost, X., and Huet, B. (2019). Semantic and
visual similarities for efficient knowledge transfer in
cnn training. In CBMI, pages 1–6.
Rother, C., Kolmogorov, V., and Blake, A. (2004). ”Grab-
Cut” interactive foreground extraction using iterated
graph cuts. ACM Trans Graph, 23(3):309–314.
Sun, R., Zhu, X., Wu, C., Huang, C., Shi, J., and Ma, L.
(2019). Not all areas are equal: Transfer learning for
semantic segmentation via hierarchical region selec-
tion. In CVPR, pages 4360–4369.
Wang, Y., Zhang, J., Kan, M., Shan, S., and Chen, X.
(2020). Self-supervised equivariant attention mech-
anism for weakly supervised semantic segmentation.
In CVPR, pages 12275–12284.
Wu, Z., Shen, C., and Van Den Hengel, A. (2019). Wider or
deeper: Revisiting the resnet model for visual recog-
nition. Pattern Recognit, 90:119–133.
Yang, K., Russakovsky, O., and Deng, J. (2019). Spa-
tialSense: An adversarially crowdsourced benchmark
for spatial relation recognition. In ICCV.
Zhou, B., Khosla, A., Lapedriza, A., Oliva, A., and Tor-
ralba, A. (2016). Learning deep features for discrimi-
native localization. In CVPR, pages 2921–2929.
Zhou, Y., Zhu, Y., Ye, Q., Qiu, Q., and Jiao, J. (2018).
Weakly supervised instance segmentation using class
peak response. In CVPR, pages 3791–3800.
Zhu, G. and Iglesias, C. A. (2016). Computing seman-
tic similarity of concepts in knowledge graphs. IEEE
Trans Knowl Data Eng, 29(1):72–85.
Segment My Object: A Pipeline to Extract Segmented Objects in Images based on Labels or Bounding Boxes
625
