
Properties and Bounds for the Single-vehicle Capacitated Routing
Problem with Time-dependent Travel Times and Multiple Trips
T. Adamo
a
, G. Ghiani
b
, P. Greco and E. Guerriero
c
Dipartimento di Ingegneria per l’Innovazione, Universit
`
a del Salento, Via Monteroni, Lecce, Italy
Keywords:
Time-dependent Routing, Multi-trip, Capacitated Vehicle Routing Problem, Path Ranking Invariance.
Abstract:
This paper deals with a problem where the same vehicle performs several routes to serve a set of customers
and arc traversal times vary along the planning horizon. The relationship with its time-invariant counterpart is
investigated and a procedure to compute lower and upper bounds on the optimal solution value is developed.
Computational results on instances, based on the Paris (France) road graph, show the effectiveness of this
approach.
1 INTRODUCTION
In this work, we consider a variant of the capaci-
tated vehicle routing problem, where the same vehi-
cle can perform several routes during its workday and
the travel times depends on the departure times. This
problem arises in e-groceries, where customers can
order goods through the internet and have them de-
livered at home. In particular in the home delivery
of perishable goods, like foods, routes are of short
duration and must be combined to form a complete
workday. Indeed in urban areas, physical street struc-
tures essentially allow only small-sized vehicles for
delivery. This leads to routes shorter than the work-
day. At the time of writing, this type of problem
is becoming more and more important: Coronavirus
disease (COVID-19) pandemic has rapidly acceler-
ated the shift toward online grocery shopping and the
digitization of stores. The idea is that, once people
will get used to order online their groceries, they will
stick with this habit even after the pandemic. A com-
prehensive review on the variants of multi-trip ve-
hicle routing problem can be found in (Cattaruzza
et al., 2016). In urban areas, taking into account time-
dependencies of travel times helps to capture conges-
tion phenomena and improve route design and logis-
tics costs. Some existing researches have studied ve-
hicle routing problems under time-dependent settings
(Gendreau et al., 2015). To the best of our knowl-
a
https://orcid.org/0000-0002-9505-5869
b
https://orcid.org/0000-0002-5243-1799
c
https://orcid.org/0000-0002-8959-5017
edge, only in (Sun et al., 2018), (Pan et al., 2020)
and (Karoonsoontawong et al., 2020) it has been con-
sidered both time-dependent travel time and multiple
use of vehicles together. In (Sun et al., 2018) the au-
thors report about a tabu search heuristic that can ef-
ficiently handle different types of constraints includ-
ing time windows and multiple uses of vehicles. The
authors take into consideration the time-dependent
travel times between different customers in order to
satisfy time windows constraints, and also minimize
the total scheduling time of all vehicles. They adopted
a piece-wise linear travel speed model which leads
to a quadratic travel time function, characterized by
complicated calculations of travel times. In (Pan
et al., 2020) and (Karoonsoontawong et al., 2020)
the time-dependent setting is modeled by the widely
used piecewise linear travel time function paradigm
(Ichoua et al., 2003) only in order to satisfy time win-
dows constraints, whilst arc costs are assumed to be
constant.
In this paper, we investigate some properties of
the time dependent capacitated single-vehicle rout-
ing problem with multiple trips (TD-CSVRPMT).
In particular we investigated the relationship be-
tween TD-CSVRPMT and its time-independent coun-
terpart. We exploit some results recently provided
by (Adamo et al., 2020), where the authors stud-
ied a fundamental property of time-dependent graphs
called path ranking invariance. A time-dependent
graph is path ranking invariant if the ordering of its
paths w.r.t. travel duration is not dependent on the
start travel time. (Adamo et al., 2020) proved that
this property can be exploited to solve a large class
82
Adamo, T., Ghiani, G., Greco, P. and Guerriero, E.
Properties and Bounds for the Single-vehicle Capacitated Routing Problem with Time-dependent Travel Times and Multiple Trips.
DOI: 10.5220/0010322500820087
In Proceedings of the 10th International Conference on Operations Research and Enterprise Systems (ICORES 2021), pages 82-87
ISBN: 978-989-758-485-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

of time-dependent routing problems including the
Time-Dependent Travelling Salesman Problem and
the Time-Dependent Rural Postman Problem. We ex-
tended these results to the TD-CSVRPMT by proving
that the optimal solution of a time-independent ca-
pacitated vehicle routing problem (CVRP) provides
both a lower bound and an upper bound for the orig-
inal TD-CSVRPMT. The paper is organized as fol-
lows. Section 2 introduces the notation used through-
out the paper. Section 3 presents a procedure to com-
pute lower and upper bounds on the optimal solution
value. Section 4 is devoted to computational exper-
iments. Finally some conclusions follow in Section
5.
2 NOTATION AND PROBLEM
DEFINITION
The problem considered is defined on a time-
dependent directed complete graph G := (V ∪
{0},A,τ,q
i
,Q ) , where V = {1,. .. ,n} is the set of
customers, vertex 0 is the depot and A := {(i, j) : i ∈
V, j ∈ V }
S
{(0,i) : i ∈ V }
S
{(i,0) : i ∈ V } is the set of
arcs. We have a single vehicle of capacity Q deliver-
ing goods from the depot to the set of customer nodes
V . The vehicle workday corresponds to a route made
up of a set of R trips, where each trip starts and ends
at the depot (some of these trips might be empty).
We assume, without loss of generality, that the trips
are served in the order 1, 2,. .. ,R. Let denote with
[0,T ] the time interval associated to a single work-
ing day. We denote with τ : A × R
+
→ R a function
that associates to each arc (i, j) ∈ A and starting time
t ∈ [0,+∞) the traversal time when a vehicle leaves
the vertex i at time t. Without loss of generality we
suppose that the travel time functions are constant in
the long run, that is τ(i, j,t) := τ(i, j,T ) with t ≥ T .
For the sake of notational simplicity, we use τ
i j
(t)
to designate τ(i, j,t). We suppose that traversal time
τ
i j
(t) satisfy the first-in-first-out (FIFO) property, i.e.,
leaving the vertex i later implies arriving later at ver-
tex j. Each customer i ∈ N is characterized by a de-
mand q
i
, which is deterministic, known in advance
and cannot be split.
For any given path p
k
:= (i
0
,i
1
,. .. ,i
k
), the cor-
responding duration z(p
k
,t) can be computed recur-
sively as:
z(p
k
,t) := z(p
k−1
,t) + τ
i
k−1
i
k
(z(p
k−1
,t)), (1)
with the initialization z(p
0
,t) := 0. The TD-
CSVRPMT aims to determine the optimal multi-trip
route on G := (V ∪ {0},A, τ,q
i
,Q ) used by a single
vehicle, based at the depot, to serve the set of cus-
tomers. Only the capacity restriction for the vehicle
is imposed, and the objective is to minimize the total
travel time needed to serve all the customers when the
vehicle leaves the depot at a time instant t = 0, that is:
min
p∈P
z(p,0).
where P denotes the set of paths feasible for TD-
CSVRPMT. It is worth noting that the time indepen-
dent counterpart of the TD-CSVRPMT is the classi-
cal CVRP. Indeed, in the classical CVRP routes do
not need to correspond to vehicles. In other words,
any feasible solution of the CVRP may be used to
model a real-world situation where a single vehicle
will perform all routes in sequence. Algorithms de-
veloped for the CVRP are not able to consider time-
varying travel times without essential structural mod-
ifications. Nevertheless, we observe that the absence
of time constraints implies that time-varying travel
times have an impact on the ranking of solutions of
the TD-CSVRPMT, but they do not pose any diffi-
culty for feasibility check of solutions. In particular,
one can assert that there always exists a time-invariant
(dummy) cost function c : A → R
+
such that a least
duration route of TD-CSVRPMT is also a least cost
solution of the time-invariant CVRP, defined on the
time-invariant graph G
c
= (V ∪ {0},A,c,q
i
,Q ).
Definition 2.1 (Valid Cost Function). A time-
invariant cost function c : A → R
+
is valid for the
TD-CSVRPMT defined on G = (V ∪ {0},A,τ, q
i
,Q ),
if the least duration solution p
∗
= min
p∈P
z(p,0) corre-
sponds to a least cost solution of the time-invariant
CVRP defined on G
c
= (V ∪ {0},A,c,q
i
,Q ).
If we are given a cost function valid for an in-
stance of the TD-CSVRPMT defined on a time-
dependent G = (V ∪ {0},A, τ,q
i
,Q ) , then we can de-
termine the least duration solution p
∗
by exploiting
algorithms developed for CVRP. For this purpose we
introduce a property of time-dependent graphs called
path ranking invariance.
Definition 2.2 (Path Ranking Invariance). A time-
dependent graph G is path ranking invariant, if the
path dominance rule holds true for any pair of paths
p
0
and p
00
of G, it results that:
z(p
0
,t) ≥ z(p
00
,t) ∀t ≥ 0.
Since travel time function are constant in the
long run, if a time-dependent graph G = (V ∪
{0},A, τ,q
i
,Q ) is path ranking invariant then a valid
cost function is c(i, j) = τ
i j
(T ). In the following sec-
tion we exploit the path ranking invariance property
in order to devise a procedure to compute lower and
upper bounds for the TD-CSVRPMT.
Properties and Bounds for the Single-vehicle Capacitated Routing Problem with Time-dependent Travel Times and Multiple Trips
83

3 PROPERTIES AND BOUNDS
Given a time-dependent graph G = (V ∪
{0},A, τ,q
i
,Q ), we define an auxiliary path ranking
invariant graph G
= (V ∪ {0}, A,τ, q
i
,Q ) where τ
i j
(t)
is a lower approximation of the original traversal time
τ
i j
(t), that is:
τ
i j
(t) ≤ τ
i j
(t),
with (i, j) ∈ A and t ∈ [0, T ]. We suppose that the
traversal time function is generated by the travel time
model proposed in (Ichoua et al., 2003) (IGP model
for short), in which each arc (i, j) ∈ A is character-
ized by a constant stepwise speed function v
i j
(t) and a
length L
i j
. We suppose that the horizon is partitioned
into H subintervals [T
h
,T
h+1
] (h = 0,. ..,H − 1), with
T
0
= 0 and T
H
= T . We assume that all arcs of the
auxiliary graph share a common speed function, such
that
v
i j
(t) = v
h
,
with t ∈ [T
h
,T
h+1
] and h = 0,.. ., H − 1. According
to the IGP model, given a start time t the travel time
value τ
i j
(t) is computed by the following iterative
procedure.
Algorithm 1: Computing the travel time τ
i j
(t).
k ← h : t
h
≤ t ≤ t
h+1
d ← L
i j
;
t
0
← t + d/v
k
;
while t
0
> T
k+1
do
d ← d − v
h
(T
k+1
−t);
t ← T
k+1
;
t
0
← t + d/v
k+1
;
k ← k + 1
return t
0
−t
In the IGP model the speed of a vehicle is not a
constant over the entire length of arc (i, j) ∈ A but
it changes when the boundary between two consecu-
tive time periods is crossed. The relationship between
the input parameters and the output value of the IGP
model can be expressed in a compact fashion as fol-
lows:
L
i j
=
Z
t+τ
i j
(t)
t
v(µ)dµ. (2)
We denote with z(p
k
,t) the traversal time of a path p
k
at time instant t on the time-dependent graph G, that
is
z(p
k
,t) = z(p
k−1
,t) + τ
i
k−1
i
k
(z(p
k−1
,t)), (3)
with the initialization z(p
0
,t) = 0.
Proposition 3.1. The time dependent graph G = (V ∪
{0},A, τ,q
i
,Q ) is path ranking invariant.
Proof. We observe that from (2) it follows that given
a path p we have that:
∑
(i, j)∈p
L
i j
=
Z
t+z(p,t)
t
v(µ)dµ,
where the notation (i, j) ∈ p means that the arc (i, j) ∈
A is traversed by the path p. This implies that if a path
p
0
is shorter that a path p
00
then p
0
is also quicker that
p
00
for any start time t ∈ [0,T ]:
∑
(i, j)∈p
0
L
i j
≤
∑
(i, j)∈p
00
L
i j
⇔ z(p
0
,t) ≤ z(p
00
,t),
which proves the thesis.
In order to determine the IGP parameters we
follow the two steps procedure proposed in (Adamo
et al., 2020).
Step 1 - Determining the Potential Speed Breakpoints.
Let {t
i jk
,k = 0,...,K
i j
− 1} be the set of breakpoints
of the travel time function τ
i j
(t) and let Γ
i j
(t) be
the arrival time function, i.e. Γ
i j
(t) = t + τ
i j
(t),
with (i, j) ∈ A. In the first phase, we determine
a set Ω = {T
0
,. .. ,T
H
} of speed breakpoints as
Ω =
S
(i, j)∈A
Ω
i j
, where each Ω
i j
is an ordered set
determined by means of an iterative procedure
(Algorithm 2) composed of a main while loop in
which each travel time breakpoint t
i jk
is added to Ω
i j
.
Moreover, for each t
i jk
:
1. Ω
i j
is iteratively enriched by the arrival time
Γ
i j
(t
i jk
) associated to a starting time equal to t
i jk
,
by the arrival time Γ
i j
(Γ
i j
(t
i jk
)) associated to a
starting time equal to Γ
i j
(t
i jk
), etc, until no speed
breakpoint less than or equal to t
i j,K
i j
−1
can be
generated;
2. finally, Ω
i j
is iteratively enriched by the starting
time Γ
−1
i j
(t
i jk
) associated to an arrival time equal
to t
i jk
, by the starting time Γ
−1
i j
(Γ
−1
i j
(t
i jk
)) asso-
ciated to an arrival time equal to Γ
−1
i j
(t
i jk
), etc,
until no speed breakpoint greater than or equal to
t
i j0
= 0 can be generated.
Step 2 - Determining the Speed Levels and the Length
of the IGP Model.
We start by observing that τ is a lower approximation
of τ, if the following relationships holds true for each
arc (i, j) ∈ A and time instant t ∈ [0, T ]:
Z
t+τ
i j
(t)
t
v(µ)dµ ≥
Z
t+τ
i j
(t)
t
v(µ)dµ = L
i j
. (4)
ICORES 2021 - 10th International Conference on Operations Research and Enterprise Systems
84

Algorithm 2 : Determine a set of speed breakpoints Ω
i j
given the set of time breakpoints {t
i j0
,.. . ,t
i jK
i j
−1
}.
Ω
i j
=
/
0
for all t ∈ {t
0
,. .. ,t
i jK
i j
−1
} do
if t /∈ Ω
i j
then
Ω
i j
← t
t
0
← t
while (t
0
≤ t
i jK
i j
−1
) ∧ (Γ
i j
(t
0
) /∈ Ω
i j
) do
Ω
i j
← Γ
i j
(t
0
)
t
0
← Γ
i j
(t
0
)
t
0
← t
while (t
0
≥ Γ
i j
(t
0
) ∧ (Γ
−1
i j
(t
0
) /∈ Ω
i j
) do
Ω
i j
← Γ
−1
i j
(t
0
)
t
0
← Γ
−1
i j
(t
0
)
return Ω
i j
Theorem 3.1. (Adamo et al., 2020) Given two time-
dependent graphs G = (V,A,τ) and G = (V,A,τ), if
the relationships (4) holds true for any arc (i, j) ∈ A
and time instant t ∈ Ω, then the traversal time func-
tion τ is a lower approximation of the original travel
time function τ.
Let a
i jkh
= min(T
h+1
− T
h
,max(0, Γ
i j
(t
i jk
) − T
h
))
if k ≤ h, 0 otherwise, with (i, j) ∈ A, h = 0,...,H − 1,
k = 0, .. ., |Ω
i j
| − 1. Since v(t) is a constant stepwise
function the relationship (4) can be expressed by the
following linear equality:
|Ω|−1
∑
h=0
a
i jkh
× v
h
− s
i jk
= L
i j
, (5)
where s
i jk
denotes the surplus of the right-hand-
side of (4) with respect to L
i j
, with (i, j) ∈ A, h =
0,. .. ,H − 1, k = 0,. .. ,|Ω
i j
| − 1. We observe that
the maximum fitting deviation between the original
travel time function τ
i j
(t) and its lower approxima-
tion τ
i j
(t)), depends on the quantity
ζ
i j
= max
t
k
∈Ω
i j
s
i jk
− min
t
k
∈Ω
i j
s
i jk
,
with (i, j) ∈ A.
Remark 3.2. If ζ
i j
is equal to zero, then the travel
time function τ
i j
(t) is a perfect fit, for all arcs
(i, j) ∈ A. In this case, the original graph G = (V ∪
{0},A, τ,q
i
,Q ) is path ranking invariant and the opti-
mal solution of TD-CSVRPMT can be determined by
solving a classical CVRP on G
c
(V ∪ {0}, A,c, q
i
,Q )
where c
i j
= τ
i j
(T ), with (i, j) ∈ A .
In all other cases (i.e. ζ
i j
> 0 for some (i, j) ∈ A)
the value of ζ =
∑
(i, j)∈A
ζ
i j
represents a measurement
of the distance from this special case.
We determine the auxiliary graph G by determin-
ing the lower approximation that minimize the value
of ζ. For this purpose we formulate the linear pro-
gram (6)-(14), where s
i j
and s
i j
model, respectively,
the minimum and maximum value of the surplus vari-
able s
i jk
, with (i, j) ∈ A and k = 0,.. .,|Ω
i j
|− 1. A so-
lution of such linear programming model represents
the parameters of a constant piecewise function y(t)
and the constant values x
i j
, with (i, j) ∈ A. The con-
tinuous variable y
h
represents the value of y(t) during
the h −th time interval, that is:
y(t) = y
h
,
with t ∈ [t
h
,t
h+1
] and h = 0,...,|Ω| − 1. The set of
feasible solutions of the linear program (6)-(14) repre-
sents the IGP input parameters for generating a family
of lower approximations of the travel time function τ.
ζ
∗
:= min
∑
(i, j)∈A
ζ
i j
(6)
s.t.
|Ω|−1
∑
h=0
a
i jkh
· y
h
− s
i jk
= x
i j
(7)
, k = 0,...,|Ω
i j
| − 1
(i, j) ∈ A
ζ
i j
≥ s
i j
− s
i j
(i, j) ∈ A (8)
s
i j
≤ s
i jk
k = 0,...,|Ω
i j
| − 1, (i, j) ∈ A (9)
s
i j
≥ s
i jk
k = 0,...,|Ω
i j
| − 1, (i, j) ∈ A (10)
y
h
≥ ρ h = 0, .. ., |Ω| − 1 (11)
s
i jk
≥ 0 k = 0,...,|Ω
i j
| − 1, (i, j) ∈ A (12)
ζ
i j
≥ 0 (i, j) ∈ A (13)
x
i j
≥ 0 (i, j) ∈ A (14)
The objective function (6) states that the opti-
mization model aims to determine a constant step-
wise function y
∗
(t), such that it is minimized the total
maximum fitting deviation between the original travel
time function τ and its lower approximation τ. Con-
straints (7) state the relationship between y(t), x
i j
and
s
i jk
at time instant t
i jk
∈ Ω
i j
. Constraints (8) state
the relationship between the objective function and
the range value of ζ
i j
, modeled as the difference be-
tween s
i j
and s
i j
. Constraints (9) and (10) state the
relationship between s
i j
, s
i j
and the continuous vari-
ables s
i jk
. In order to cut off the trivial (pointless)
solution y(t) = 0 for t ≥ 0, constraints (11) state that
the constant stepwise linear function y(t) has to be
Properties and Bounds for the Single-vehicle Capacitated Routing Problem with Time-dependent Travel Times and Multiple Trips
85
greater or equal than the input parameter ρ > 0. Con-
straints (12), (13) and (14) provide the non-negative
conditions of the remaining decision variables.
Let y
∗
(t) and x
∗
denote, respectively, the step
function and the x’s values associated with the opti-
mal solution of the the linear program (6)-(14). The
lower approximation τ
i j
(t) is generated by the IGP
model with the following input parameters:
v(t) = y
∗
(t), L
i j
= x
∗
i j
,
with (i, j) ∈ A and t ∈ [0, T ].
Summing up the proposed lower bounding proce-
dure consists of three main steps.
• STEP 1. Solve linear program (6)-(14). Set the
travel speed function v(t) equal to y
∗
(t). Similarly
we set the L
i j
to x
∗
i j
for each (i, j) ∈ A.
• STEP 2. Determine the solution p
∗
as the least
cost solution of the following time-independent
CVRP:
min
p∈P
∑
(i, j)∈p
L
i j
• STEP 3. Compute the lower bound z
∗
by evaluat-
ing p
∗
w.r.t. τ obtained as output of the IGP model
with input parameters set according the optimal
solution of the linear program (6)-(14) determined
at STEP 1, that is:
z
∗
= z(p
∗
,0)
We finally observe that since the path p
∗
belongs
to the set of feasible solutions P, we also generate a
parameterized family of upper bound z obtained by
evaluating p
∗
w.r.t. the original travel time function τ
:
z := z(p
∗
,0).
4 COMPUTATIONAL RESULTS
The algorithms have been implemented in Java and
run on a Linux machine clocked at 2.8 GHz and
equipped with 16GB of RAM. We used IBM ILOG
CPLEX 12.10 as a black-box solver to find the solu-
tion of the linear program (6)-(14), and VRPSolver
from (Pessoa et al., 2020) as exact solver for the
Asymmetric CVRP. We imposed a time limit of 3600
seconds for both stages.
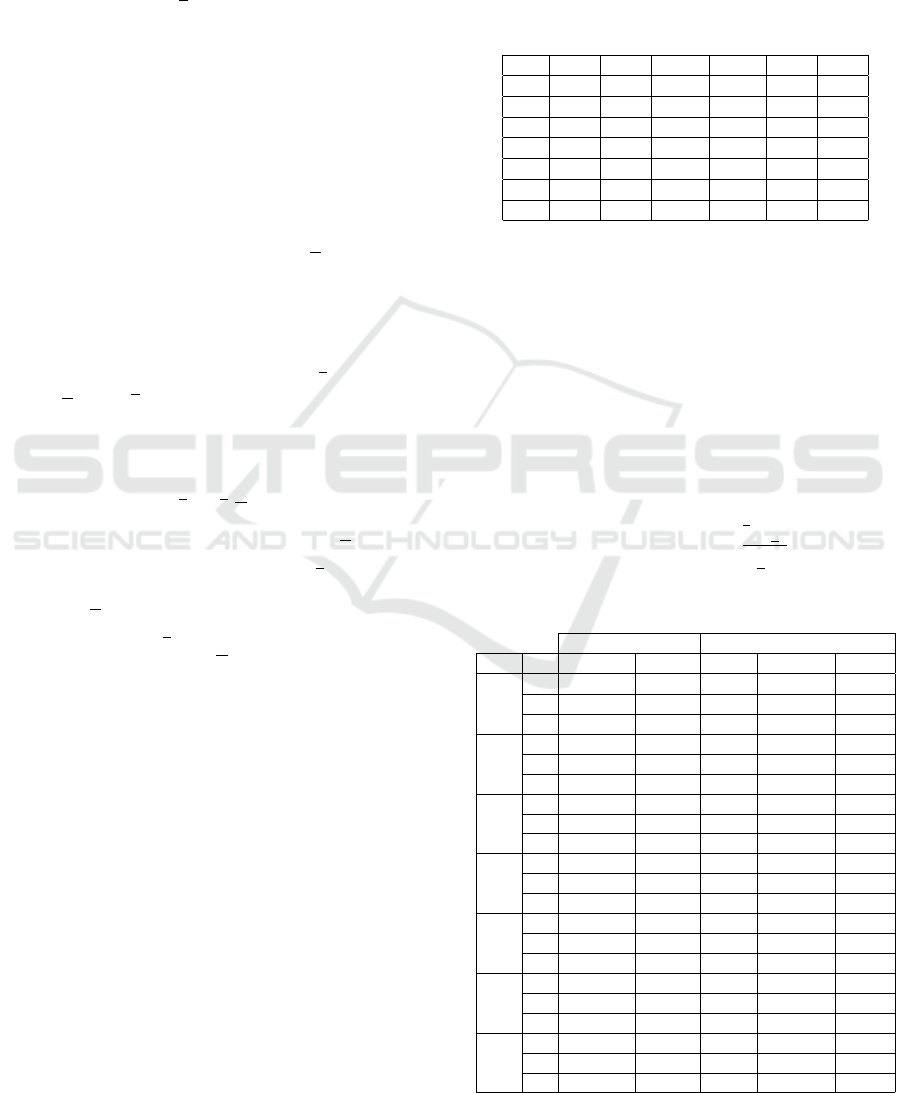
We have generated 7 classes of test instances each
containing 10 individual instances, based on the Paris
(France) road graph (Ghiani et al., 2020), with |V | =
20, 30, 40, 50, 60, 70 and 80 nodes, respectively. We
assigned a demand q
i
∈ {6, 8,10, 12} (i ∈ V ) to each
customer. Therefore, customers can be partitioned in
a family of 4 subsets sharing the same demand, i.e.
V =
S
c∈{6,8,10,12}
V
c
. The number of daily trip R is
chosen to be 3, 4, or 5. Moreover we set the value of ρ
equal to 1/ min
h=0,...,H−1
(T
h+1
−T
h
). Table 1 summarizes
customers demands distribution and vehicles capacity
Q according to the number of nodes. Q
c
=
∑
i∈V
q
i
is the
total demand.
Table 1: Test instances.
|V | |V
6
| |V
8
| |V
10
| |V
12
| Q
c
Q
20 5 5 5 4 168 66
30 8 7 7 7 262 97
40 10 10 10 9 348 126
50 13 12 12 12 442 157
60 15 15 15 14 528 186
70 18 17 17 17 622 217
80 20 20 20 19 708 246
The results are reported in Table 2. The headings
are as follows:
• T IME
0
: average computing time for the STEP 1
in seconds;
• ζ
∗
: average objective value determined at STEP
1;
• OPT : number of instances solved to optimality in
STEP 2 by VRPSolver out of 10 ;
• T IME
1
: average computing time for the VRP-
Solver in seconds;
• GAP: average optimality gap
z − z
∗
z
∗
(%).
Table 2: Computational results.
STEP 1 STEP 2
|V | R T IME
0
ζ
∗
OPT T IME
1
GAP
20
5 7.4 0.138 10 1.2 1.19
4 6.7 0.117 10 1.3 1.03
3 5.9 0.112 10 1.3 1.03
30
5 22.3 0.214 10 1.6 1.93
4 20.7 0.172 10 1.5 1.39
3 20.1 0.148 10 1.8 1.20
40
5 50.7 0.374 10 10.7 4.87
4 49.8 0.343 10 3.7 4.42
3 48.2 0.307 10 4.6 3.81
50
5 160.5 0.537 10 7.5 8.33
4 164.6 0.514 10 8.7 8.05
3 147.3 0.499 10 18.5 7.86
60
5 427.8 0.596 10 52.8 8.90
4 452.6 0.586 10 57.1 8.99
3 363.2 0.576 10 63.8 8.98
70
5 988.8 0.619 9 340.4 7.91
4 988.8 0.619 10 580.6 8.98
3 988.8 0.619 9 244.2 8.08
80
5 1749.8 0.628 10 223.6 8.73
4 1749.8 0.628 10 226.8 8.81
3 1749.8 0.628 10 405.5 8.90
ICORES 2021 - 10th International Conference on Operations Research and Enterprise Systems
86

The procedure does not exceeds the time limits
for 208 out of 210 instances: in particular the algo-
rithm fails to determine a lower bound for two test
cases. Therefore, with reference to columns T IME
1
and GAP, each row is the average across instances
solved to optimality by VRPSolver. The overall aver-
age time to solve the linear program (6)-(14) (STEP
1) is about 484 seconds with an average ζ
∗
equal
to 0.427, while the overall average time required by
VRPSolver (STEP 2) is about 108 seconds obtaining
an average GAP of 5.88%. We underline that as ζ
∗
grows, the GAP also increases. In particular when ζ
∗
raises up to 0.5, GAP doubles its value.
5 CONCLUSIONS
This paper has introduced a procedure to compute
lower and upper bounds of the optimal solution value
of the time dependent capacitated single-vehicle rout-
ing problem with multiple trips. For the special case
where the graph is path ranking invariant, we have
shown that the upper bound computed in this way pro-
vides an optimal solution. Future work will focus on
embedding the lower and upper bounding procedure
introduced in this paper in an enumerative search al-
gorithm.
REFERENCES
Adamo, T., Ghiani, G., and Guerriero, E. (2020).
On path ranking in time-dependent graphs
https://arxiv.org/abs/2009.07588v1.
Cattaruzza, D., Absi, N., and Feillet, D. (2016). Vehicle
routing problems with multiple trips. 4OR, 14(3):223–
259.
Gendreau, M., Ghiani, G., and Guerriero, E. (2015). Time-
dependent routing problems: A review. Computers &
Operations Research, 64:189 – 197.
Ghiani, G., Adamo, T., Greco, P., and Guerriero, E. (2020).
Lifting the performance of a heuristic for the time-
dependent travelling salesman problem through ma-
chine learning. Algorithms, 13(12).
Ichoua, S., Gendreau, M., and Potvin, J.-Y. (2003). Vehi-
cle dispatching with time-dependent travel times. Eu-
ropean journal of operational research, 144(2):379–
396.
Karoonsoontawong, A., Punyim, P., Nueangnitnaraporn,
W., and Ratanavaraha, V. (2020). Multi-trip time-
dependent vehicle routing problem with soft time win-
dows and overtime constraints. Networks and Spatial
Economics, pages 1–50.
Pan, B., Zhang, Z., and Lim, A. (2020). Multi-trip time-
dependent vehicle routing problem with time win-
dows. European Journal of Operational Research.
Pessoa, A., Sadykov, R., Uchoa, E., and Vanderbeck, F.
(2020). A generic exact solver for vehicle routing
and related problems. Mathematical Programming,
183(1):483–523.
Sun, Y., Wang, D., Lang, M., and Zhou, X. (2018). Solving
the time-dependent multi-trip vehicle routing prob-
lem with time windows and an improved travel speed
model by a hybrid solution algorithm. Cluster Com-
puting, pages 1–12.
Properties and Bounds for the Single-vehicle Capacitated Routing Problem with Time-dependent Travel Times and Multiple Trips
87
