
Self Representation and Interaction in Immersive Virtual Reality
Eros Viola
a
, Fabio Solari
b
and Manuela Chessa
c
Dept. of Informatics, Bioengineering, Robotics, and Systems Engineering,
University of Genoa, Italy
Keywords:
Virtual Reality, Self Representation, Intel Realsense D435, Interaction, Leap Motion, Manus Prime Haptic
Gloves, Alignment, Rigid Transformation, Live Correction.
Abstract:
Inserting a self-representation in Virtual Reality is an open problem with several implications for both the
sense of presence and interaction in virtual environments. To cope the problem with low cost devices, we de-
vise a framework to align the measurements of different acquisition devices used while wearing a tracked VR
head-mounted display (HMD). Specifically, we use the skeletal tracking features of an RGB-D sensor (Intel
Realsense d435) to build the user’s avatar, and compare different interaction technologies: a Leap Motion, the
Manus Prime haptic gloves, and the Oculus Controllers. The effectiveness of the proposed systems is assessed
through an experimental session, where an assembly task is proposed with the three different interaction medi-
ums, with and without the self-representation. Users reported their feeling by answering the User Experience
and Igroup Presence Questionnaires, and we analyze the total time to completion and the error rate.
1 INTRODUCTION
In current Virtual Reality (VR) applications, the vi-
sual feedback of the user’s body is often missing, de-
spite the abundance of enabling technologies, which
could be used for its implementation. The drawback
of these technologies is mainly the high cost, in fact
they are not so used in practice except by big compa-
nies.
This paper considers the problem of constructing a
self-representation in VR and finding a stable, reliable
and affordable solution that can improve the sense of
presence of the users in the virtual environment. The
aim of our work is to devise a general framework that
sets up different VR systems, which combine the most
commonly used VR headsets (e.g. the Oculus Rift and
the HTC Vive), devices to capture the full body (e.g.
off-the-shelf RGB-D devices, like the Intel Realsense
d435), and technologies to represent the hands and the
fine movement of the fingers, such as the Oculus con-
trollers, the Leap Motion and the Manus Prime haptic
gloves.
The importance of the user’s avatar is studied
comparing the proposed systems with and without
the self-representation of the user (i.e., the avatar).
a
https://orcid.org/0000-0001-7447-7918
b
https://orcid.org/0000-0002-8111-0409
c
https://orcid.org/0000-0003-3098-5894
The focus is to develop a framework that is compat-
ible with the most common head-mounted displays
(HMDs), and that can also be extended to other track-
ing devices, both for the body tracking and for the
hands and fingers tracking.
This would be extremely helpful in many applica-
tions, such as training of people or simulation of spe-
cific situations (e.g. medical, first-aid, rescue), where
the use of avatars of the users would result in a much
more immersive scenario, thus increasing the quality
of the realism of the application.
To address the self-representation in VR, we pro-
pose to fuse the data acquired by an RGB-D camera
and an HMD with a hand-tracking device, to recon-
struct an accurate avatar of the users. Such an avatar
not only moves in a coherent way with the user, but
also has a good representation of the hands and the
fine movement of the fingers to allow interaction in-
side the virtual environment. Some authors have al-
ready addressed the problem of fusing information
acquired by an RGB-D camera and the Leap Mo-
tion: e.g. in (Chessa et al., 2016) the authors set up
an affordable virtual reality system, which combines
the Oculus Rift HMD, a Microsoft Kinect v1, and a
Leap motion, to recreate inside the virtual environ-
ment a first-person avatar, who replicates the move-
ment of the user’s full-body and the fine movements
of his/her fingers and hands. Here, we generalize
Viola, E., Solari, F. and Chessa, M.
Self Representation and Interaction in Immersive Virtual Reality.
DOI: 10.5220/0010320402370244
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 2: HUCAPP, pages
237-244
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
237

that idea by developing a framework that allows us to
combine different off-the-shelf devices to obtain im-
mersive VR systems with a self-representation of the
user, who is experiencing the VR environment.
2 RELATED WORKS
In the current market, there are several solutions that
allow us to build an avatar of the user. The first one
uses the Inverse Kinematics (IK) to dynamically re-
produce natural body movements via six data points
acquired by the headset, which represent the position
of the head, the controllers that represent the posi-
tion of the hands and some trackers, two positioned
on the feet and one on the pelvis (Roth et al., 2016;
Caserman et al., 2019). IK generates an accurately
proportioned virtual human skeleton, and seamlessly
re-targets and synchronizes the users’ motion to the
bones of the chosen avatar. Other approaches use mo-
tion capture suits and systems (Rahul, 2018; Takayasu
et al., 2019), such as those used for animation in films
and games (Bao et al., 2019). Both of these solutions
are not easily accessible for everyone, thus we would
like to build a cheaper systems.
In the literature, people extensively investigate the
role and the impact of a self-representation in VR.
There are studies that focus on the process of embod-
iment of a self-avatar. When embodied within a self-
avatar, in some ways the user treats it as own actual
body, resulting in the so-called “body-ownership illu-
sion”. This shows that the virtual body has an impact
on how the person reacts to virtual stimuli (Yuan and
Steed, 2010). As an example, there are studies investi-
gating how people judge distances (Ries et al., 2008),
thus walking (Canessa et al., 2019; Reinhard et al.,
2020), or how embodiment affects presence (Steed
et al., 2016). Another important aspect is that the
use of self-avatars can invoke psychological effects
on user arousal, attitudes, and behaviours in virtual
environments. Some of these behaviours and atti-
tudes may extend beyond the interaction in the vir-
tual environment influencing judgments or behaviours
in the real world (Biocca, 2014). Also, the presence
of a self-avatar improves the interaction with the sur-
rounding virtual environment and simplifies motor-
related tasks (Slater et al., 1995). Furthermore, in a
shared virtual environment (SVE), the use of a self-
representation would allow the users to communicate
through their own body, as in reality, with other users
(Pan and Steed, 2017). In that case, the use of a per-
sonalized avatar (i.e. a mesh that better represent the
human figure) significantly increases the body own-
ership, agency, as well as the feeling of presence as
explained in (Waltemate et al., 2018). Consequence
of all these effects is the increase of the sense of pres-
ence inside the virtual environment.
3 MATERIALS AND METHODS
3.1 Sensor Fusion and Reference Frame
Alignments
In this paper, to align the reference frames of the
used devices for building the self-representation of
the user we follow the method proposed by (Chessa
et al., 2016). Before the alignment phase, the data
acquired by the different sensors are referred to the
sensors’ reference frame, thus the resulting compo-
nents of avatar are not perceived by the user in a first-
person perspective as in Figure 1(a). It is worth to
note that we use a simple avatar, i.e. a skeleton, since
we are mainly interested to the alignment of the ref-
erence frames and thus to the related effectiveness of
the interaction in VR, than the graphical representa-
tion of the body.
To align the data of all sensors, the alignment
phase is divided into two steps:
• Rigid transformation, computed just once, among
common points from the sensors.
• Live correction to overcome the residual offset
present between the avatar body and the hands
module.
3.1.1 Rigid Transformation
This first step allows us to align the data coming
from the different sensors. We use the least-square
rigid motion using the Singular Values Decomposi-
tion (SVD) technique (Sorkine, 2009) to compute the
rigid transformation between two sets of points (Eq.
1).
(
R, t) = argmin
R,t
n
∑
i=1
|(Rp
i
+t) − q
i
|
2
(1)
where:
• R is the rotation matrix between the two sets of
points, called P and Q, and R the computed esti-
mate.
• t is the translation vector between the centers of
mass of the two sets of points, called P and Q,
and t the computed estimate.
• P = {p
1
, p
2
, . . . , p
n
} are the VR system samples,
acquired by the HMD and the hand detection de-
vice.
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
238

(a) (b) (c)
Figure 1: Reference frame alignment. (a) The body and the hands representations are in their own reference frames (different
also with respect the first person view). (b) The head, body and hand reference frames are aligned. (c) The head, body and
hand reference frames are aligned and residual errors corrected.
• Q = {q
1
, q
2
, . . . , q
n
} are the RGB-D camera sam-
ples.
• n is the number of samples.
To properly align the different reference frames of
the sensors (i.e. “to move” P towards Q), several cor-
respondences between them are required. In our case,
we have some common joints tracked by both the
RGB-D camera and the HMD with one of the tech-
nologies for the hands and fingers detection: i.e. the
head, the palms and the wrists. Nevertheless, the re-
sult of the rigid transformation, carried out for a single
set of common points (i.e. one sample), often leads to
have a visually incorrect alignment. This means that
the user does not perceive the avatar as superimpose
to his/her body. This can be due to multiple factors,
in particular to:
• co-planar points among the common joints se-
lected,
• noise on the points detected by the sensors.
To overcome this problem, we decided to take
more samples in time as explained in (Chessa et al.,
2016): we take in consideration 5 common points
each frame and 500 samples over time. Furthermore,
during this step, the user have to move his/her arms up
and down, keeping attention that both are tracked by
the sensors, to increase the robustness of the tracking.
After this step, the result is a partial alignment of the
reference frames (i.e. the avatar with the real body of
the user), as shown in Figure 1(b).
3.1.2 Live Correction
The second step to obtain a fine alignment between
the user and the avatar is to perform a run-time cor-
rection. To have a unique body structure (i.e. natu-
ral body structure), which shows a continuity between
the hands tracked by the Controllers or the Leap Mo-
tion and the rest of the body tracked by the RGB-D
camera, we have to better fuse the data coming from
the different sensors. In particular, we decided to use
the position of the wrists acquired by the two tech-
nologies used for hand detection, since they are much
more precise with respect to the RGB-D camera de-
tection of the wrists. This allows a better alignment
of the forearm with the hand. The result of this step is
shown in Figure 1(c).
3.2 Hardware Components
The device used for Virtual Reality is the Oculus Rift
CV1
1
: it has an estimated field of view of 110 de-
grees, a resolution of 2160 × 1200 pixels, and a frame
rate of about 90Hz. It contains several sensors, such
as the accelerometer, the gyroscope and magnetome-
ter, which are used, together with the infrared constel-
lation, to track the user position and movements.
To manage the data flow from the different sen-
sors simultaneously, we used a machine with the fol-
lowing specifications: a PC equipped with graphics
card NVIDIA GeForce GTX 1080, processor Intel(R)
Core(TM) i9-8950 @ 2.90 GHz, 32 GB of RAM and
as operating system Windows 10 Home 64 bit.
The user body is detected and tracked by an RGB-
D camera, specifically developed for tracking, the In-
tel Realsense d435
2
. As skeletal tracking SDK, we
used Nuitrack
3
, a 3D tracking middleware developed
by 3DiVi Inc. This software gives information about
19 joints of the user body. Even if this SDK is paid
for, we decide to use it due to the wide range of RGB-
D camera supported such as Kinect v1, Asus Xtion,
1
https://www.oculus.com/rift/
2
https://www.intelrealsense.com/
3
https://www.nuitrack.com/
Self Representation and Interaction in Immersive Virtual Reality
239

Intel RealSense, and all the other devices on the mar-
ket.
For the detection and tracking of the hands and the
fine movements of the fingers, we used three devices:
• The standard controllers that come along with the
HMD we have chosen. The tracking technology
is the same of the considered system, i.e. the in-
frared constellation of the Oculus Rift controllers.
• The Leap Motion
4
device that captures each hand
with two 640 × 240-pixel near-infrared cameras
and fits the data with a model of the hand. Thus,
based on image stereo pairs, it can compute the
3D position of each finger and of the center of the
hand. It has a good accuracy and a field of view
of 140
◦
×120
◦
, but since it is based on image pro-
cessing, the measurements are affected by occlu-
sions and noise due to illumination, thus it cannot
be used in any environmental condition. In our
setup, we attached the Leap Motion device to the
headset.
• The Manus Prime haptic gloves
5
that have 3 main
components. One is the haptic feedback that is
transmitted by linear resonance actuators on the
fingertips, whose signals can be adjusted to dif-
ferent strengths for specific application scenar-
ios. Then, mostly important for the system here
presented, the hand tracking that is achieve by a
HTC Vive tracker through the base station of the
Vive system, and fingers tracking that is obtained
by bending sensors fused with high-performance
inertial measurement units. This, in principle,
would ensure a permanently high quality of move-
ment measurement, with a latency of 10ms. How-
ever, we will discuss in this paper some compat-
ibility problems which emerged in our sensor fu-
sion approach.
3.3 Software Components
The platform used to develop our solutions was Unity
2019.3.0f6 and Visual Studio 2019 as our IDE to code
in C#. The main plugins used are: the SteamVR tool,
so that our software is compatible with all the sup-
ported HMDs; Math.NET Numerics, to compute the
SVD in the Alignment phase; and VRTK, the Leap
Motion Unity module or the Manus plugins for Unity,
to implement the interaction with the virtual objects
based on the chosen technology.
To use the Oculus Rift HMD together with the
Manus Prime haptic gloves, a further calibration is
4
https://www.ultraleap.com/datasheets/Leap Motion
Controller Datasheet.pdf
5
https://manus-vr.com/.com/
needed to align the Vive trakers reference frame,
which is used by the Manus Prime haptic gloves,
with the Oculus reference frame. To this aim we use
OpenVR Space Calibrator
6
, a software available on
GitHub, which allows us to obtain the correct calibra-
tion.
4 EXPERIMENT
Participants. To validate the proposed method and
the three developed systems, we performed an exper-
imental session and collected data from 6 subjects (4
males, 2 females). The participants were aged from
20 to 55 (38.5 ± 16.7), and with normal or corrected-
to-normal vision. All the subjects were novel to VR.
Each subject performed all the experimental condi-
tions in a randomize order to avoid learning or habit-
uation effects.
Procedure. The experiment is performed as fol-
lows. Before starting, the experimenter shows how
to properly wear the HMD, how to wear/use the given
hand tracking device, and starts the simulation. The
user’s body inside the virtual scene is represented by
small cubes for the joints, parallepipeds for the bones,
and a 3D hand model for the hands.
The user has to perform the alignment phase, as
explained in the previous sections, and then to com-
plete the assembly task that consists of interacting and
grabbing pieces of the Iron man suit to assemble it.
As the assembly task starts, several pieces of the
superhero suit are on a table in scattered order. The
user should grasp the pieces, and put them in a high-
lighted area, by following an arbitrary order. The
pieces should be correctly oriented before attaching
them to the suit. The task ends when all the pieces are
correctly positioned.
At the end of the assembly task, the user removes
the HMD and he/she is asked to fill the questionnaires.
Measurements. During the task, the total time to
completion (TTC) and the number of time a piece of
the suit falls from his/her hands, as error rate, are
recorded. When the user finishes, he/she compiles
the User Experience Questionnaire (UEQ) (Schrepp
et al., 2014) and the Igroup Presence Questionnaire
(IPQ) (Regenbrecht and Schubert, 2002). UEQ is a
recent, fast and reliable questionnaire, which covers
a comprehensive impression of the user experience,
by considering both classical usability aspects (effi-
ciency, perspicuity, dependability) and user experi-
6
https://github.com/pushrax/OpenVR-SpaceCalibrator/
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
240

(a) (b) (c)
Figure 2: Arrangement of sensors with the 3 hand and fingers detection system. (a) Oculus Rift controllers. (b) Leap Motion
attached to the headset. (c) Manus Prime haptic gloves, which needs the HTC Vive base stations.
ence aspects (originality, stimulation). IPQ is a scale
for measuring the sense of presence experienced in a
virtual environments.
Conditions. We have implemented three different
setups, depending on the interaction device utilized:
controllers, Leap Motion, and Manus gloves. For
each interaction device, we considered two condi-
tions, one in which the full avatar is displayed, the
other one in which only the hands are displayed. A
problem of compatibility has emerged while using the
Manus gloves with the avatar systems. In fact, the
gloves are not stable if used with an RGB-D camera
based on infrared light. The problem is caused by
the IR light of the RGB-D camera that interferes with
the Vive trackers. Therefore, the calibration lead to a
bad alignment of the avatar and furthermore it is hard
to complete the task. Thus, we decided not to take
in consideration this condition, but only to use the
gloves without the RGB-D camera, i.e. without the
avatar. Figure 2 shows the arrangement of the sen-
sors in the environment for the three conditions with
avatar. The user stands in front of the RGB-D camera
at a distance of about 1m wearing the HMD. The user
is free to move over an area of about 1.5m
2
to interact
with the 3D objects in the virtual environment.
In total, we tested 5 conditions: Controller-
sAvatar (Fig. 3(a)), ControllersNoAvatar, LeapA-
vatar (Fig. 3(b)), LeapNoAvatar, ManusNoAvatar
(Fig. 3(c)).
5 RESULTS
Figure 4 shows the results of the UEQ. The average
value of each scale (range between -3 and 3) and the
associated standard deviations are shown for the 5 ex-
perimental conditions. To understand the results, we
need to separately analyze each scale:
• Attractiveness: Due to the ease of interaction,
the subjects seem to prefer the Controllers (mean
score 2.53 both with and without avatar), then
(a)
(b)
(c)
Figure 3: Snapshots of 3 (out 5) experimental conditions,
ControllersAvatar (a), LeapAvatar (b) and ManusNoAvatar
(c). For each figure, on the left the first-person view of the
VR scene, on the right the external view of the user in the
real environment.
the Manus Prime haptic gloves (mean score 2.14)
and then the Leap Motion (mean score 1.72 with
avatar, 1.61 without).
• Perspicuity: As expected, the Controllers are eas-
ier to learn (mean score 2.75 with avatar, 2.92
without avatar), than the Leap Motion though with
a high standard deviation (1.63 ± 1.35) and the
Manus Prime haptic gloves (1.46 ± 1.26).
• Efficiency: Due to the different types of inter-
action the three technologies provide, the task is
solved easily by using the Controllers rather than
with the Leap Motion (again with a high standard
deviation 1.46 ± 1.39) and the Manus Prime hap-
tic gloves.
Self Representation and Interaction in Immersive Virtual Reality
241
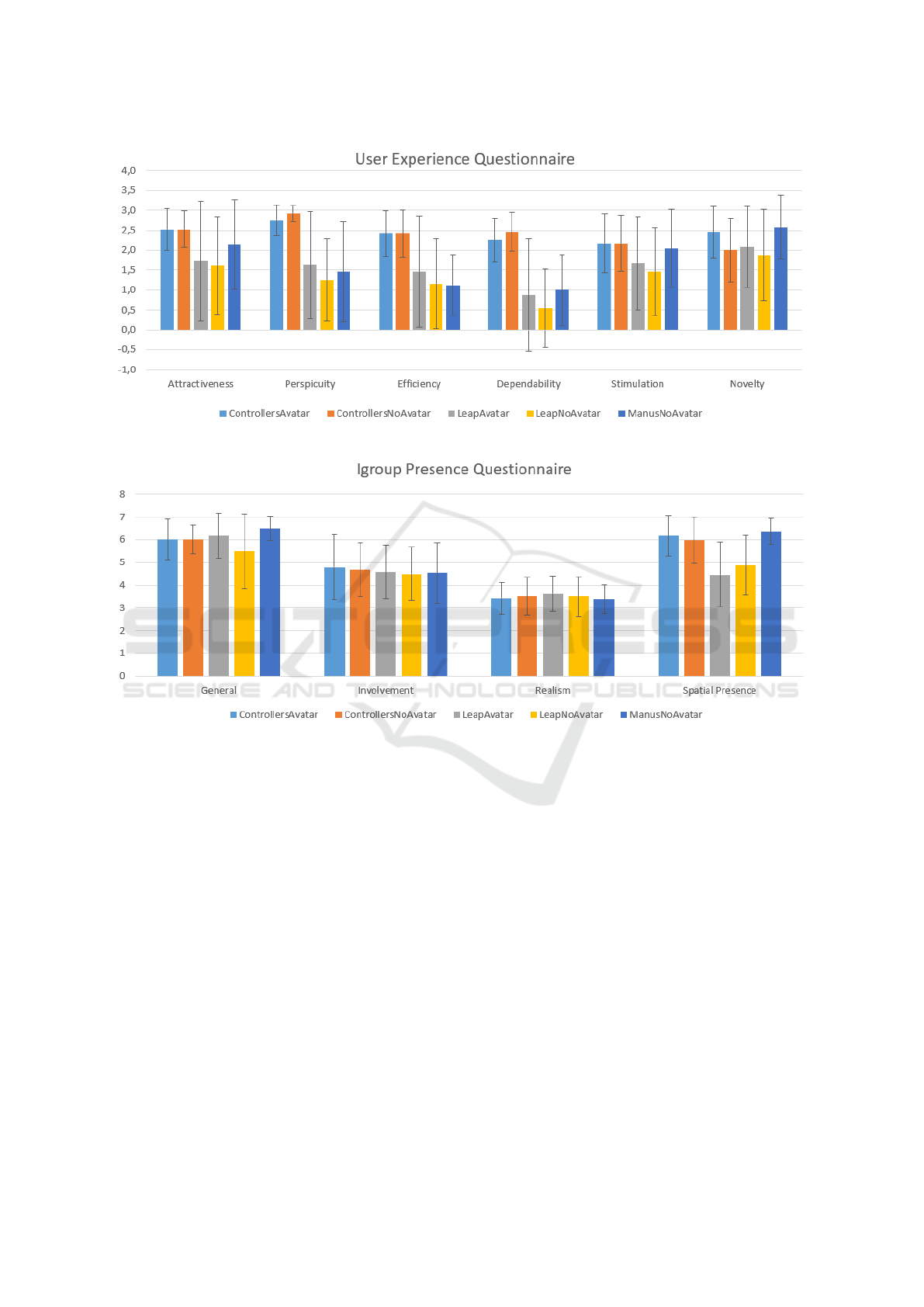
Figure 4: Results of the UEQ: mean values and standard deviations on a scale from -3 to 3.
Figure 5: Results of the IPQ: mean values and standard deviations on a scale from 1 to 7.
• Dependability: The subjects seem in control of
the interaction in case he/she uses the controllers,
while in case he/she uses the Leap Motion or the
Manus Prime haptic gloves the value is not high
as expected (mean scores 0.88 and 0.54 for the
Leap Motion with and without avatar, 1.00 for the
Manus gloves).
• Stimulation: The subjects provide similar scores
to this category. It seems that the five solutions
excite and motivate the subjects in an equal way.
• Novelty: For this category, the higher value is
for the Manus Prime haptic gloves (2.58 ± 0.80).
Then, the Controllers and the Leap Motion with
the avatar have higher values with respect to the
ones without the avatar.
Figure 5 shows the results of the IPQ, the mean
values of each category (range between 1 an 7) and
the associated standard deviations, for the 5 experi-
mental conditions, are reported.
The answers of the subjects show that the Manus
Prime haptic gloves allow us to achieve a higher Gen-
eral sense of ”being there” (6.50 ± 0.55) and Spatial
Presence (6.37 ± 0.57) with respect to, in particular,
the Leap Motion cases, in which the worst type of in-
teractions with complex objects reduces these two as-
pects (6.17 ± 0.98 and 4.47 ± 1.43, respectively, with
the avatar). While the values for the Involvement and
the Realism are very close one from the other. For
what concerns the comparison between the avatar and
no-avatar solution while using the same technology,
the results show that the use of avatar is slightly bet-
ter in all the categories of the IPQ. No appreciable
differences for the UEQ.
In Figures 6 and 7 the bar graphs representing the
mean values of the TTC an the error rate (and the re-
lated standard deviations), for the 5 experimental con-
ditions, are shown. The results show that the Con-
trollers are the easiest interaction device (mean TTC
with avatar 77.93 ± 25.57 seconds and 0.33 ± 0.82
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
242
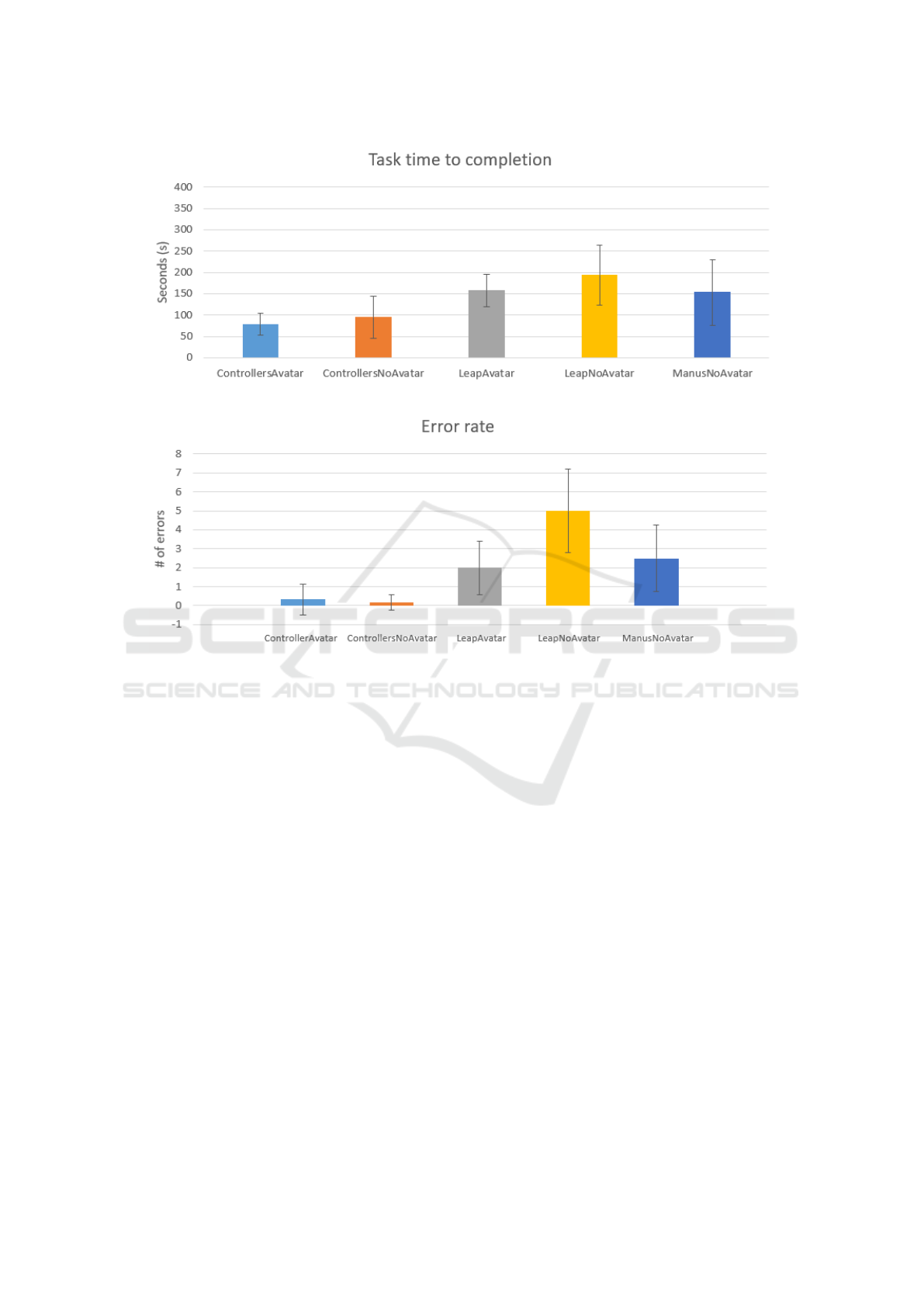
Figure 6: Total time to completion TTC for the five experimental conditions.
Figure 7: Error rate for the five experimental conditions.
errors), while the Leap Motion (mean TTC without
avatar 193.87 ± 70.24 seconds and 5.00 ± 2.19 er-
rors) is the hardest and the Manus Prime haptic gloves
are the middle ground (mean TTC without avatar
152.65 ± 77.39 seconds and 2.50 ±1.76 errors).
6 CONCLUSIONS
In this paper, we have presented a framework based
on sensor fusion to build a self representation inside
VR (i.e. an avatar of the user). The main goal of the
proposed approach is to use off-the-shelf and low cost
devices, and to be easily extended to any tracking and
interaction device.
Starting from the developed approach, we have
implemented three different setups that use the Ocu-
lus Rift as a VR device, together with three differ-
ent interaction technologies, which allow us to repre-
sent the hands and the fine movement of the fingers:
the controllers of the headset, the Leap Motion and
the Manus Prime haptic gloves. Furthermore we have
used an RGB-D camera, the Intel Realsense d435, to
track the user body, and thus to create the avatar and to
replicate the movement of the user. To further analyze
the role of the self representation, we have devised an
assembling experiment and tested it in 5 conditions:
the 3 interaction devices, and with or without the pres-
ence of the entire user avatar (we had to remove the
ManusAvatar condition for compatibility issues).
In this paper, we have presented the results of a
preliminary evaluation, conducted with a small num-
ber of participants, but it allows us to draw some pre-
liminary conclusion. For what concerns the interac-
tion, the results we obtained from our experiment sug-
gest that the Controllers is the preferred solution due
to the simplicity of the interaction, even if the model
of the hands is not precise and the movement of the
fingers depends on their position on the controllers
and not on the real one. Instead, the Leap Motion is
the hardest technology to deal with. The problems
are that the user always need to have the hands in
front of the sensors and also that complex objects af-
fect negatively the type of interaction. At the end, the
Manus Prime haptic gloves are the middle ground so-
lution that gives a precise model of the hands and a
detailed movement of the fingers. Furthermore, the
haptic module adds, on top of these, the sensation of
Self Representation and Interaction in Immersive Virtual Reality
243

touch through the vibration of the fingers. The role
of the haptic feedback in interaction should be fur-
ther analyzed. The main drawbacks of our solution
are caused by the problems of the RGB-D camera,
which interferes with the HTC Vive tracking system,
thus hampering the use with the Manus gloves. Based
on these findings, our next works will investigate on
adding a mesh to the avatar and solving the different
issues we faced during the development of our sys-
tems that are mainly caused by the RGB-D camera.
First of all, we will try to re-implement the Manus
Prime haptic gloves with the avatar case by exploiting
the skeleton provided by standard RGB cameras such
that the gloves are not disturbed by the IR light any-
more. Then, it would be interesting to try to overcome
the occlusion problem by using one more RGB-D
camera (or multiple RGB cameras) placed behind the
user and fuse the data coming from the two RGB-D
cameras before the alignment phase to obtain a much
more stable system that could better mimic other so-
lutions for the avatar reconstruction, such as motion
capture suit or Inverse Kinematics.
ACKNOWLEDGEMENTS
This work has been partially supported by the Inter-
reg Alcotra projects PRO-SOL We-Pro (n. 4298) and
CLIP E-Sant
´
e (n. 4793).
REFERENCES
Bao, D., Zhao, L., Wang, C., Zhu, G., Chang, Z., and Yuan,
J. (2019). Short animation production using game en-
gine and motion capture. In 2019 International Con-
ference on Virtual Reality and Visualization (ICVRV),
pages 296–297. IEEE.
Biocca, F. (2014). Connected to my avatar. In International
Conference on Social Computing and Social Media,
pages 421–429. Springer.
Canessa, A., Casu, P., Solari, F., and Chessa, M. (2019).
Comparing real walking in immersive virtual reality
and in physical world using gait analysis. In VISI-
GRAPP (2: HUCAPP), pages 121–128.
Caserman, P., Achenbach, P., and G
¨
obel, S. (2019). Analy-
sis of inverse kinematics solutions for full-body recon-
struction in virtual reality. In 2019 IEEE 7th Interna-
tional Conference on Serious Games and Applications
for Health (SeGAH), pages 1–8. IEEE.
Chessa, M., Caroggio, L., Huang, H., and Solari, F. (2016).
Insert your own body in the oculus rift to improve pro-
prioception. In VISIGRAPP (4: VISAPP), pages 755–
762.
Pan, Y. and Steed, A. (2017). The impact of self-avatars on
trust and collaboration in shared virtual environments.
PloS one, 12(12):e0189078.
Rahul, M. (2018). Review on motion capture technology.
Global Journal of Computer Science and Technology.
Regenbrecht, H. and Schubert, T. (2002). Real and illu-
sory interactions enhance presence in virtual environ-
ments. Presence: Teleoperators & Virtual Environ-
ments, 11(4):425–434.
Reinhard, R., Shah, K. G., Faust-Christmann, C. A., and
Lachmann, T. (2020). Acting your avatar’s age: ef-
fects of virtual reality avatar embodiment on real life
walking speed. Media Psychology, 23(2):293–315.
Ries, B., Interrante, V., Kaeding, M., and Anderson, L.
(2008). The effect of self-embodiment on distance
perception in immersive virtual environments. In Pro-
ceedings of the 2008 ACM symposium on Virtual real-
ity software and technology, pages 167–170.
Roth, D., Lugrin, J.-L., B
¨
user, J., Bente, G., Fuhrmann,
A., and Latoschik, M. E. (2016). A simplified in-
verse kinematic approach for embodied vr applica-
tions. In 2016 IEEE Virtual Reality (VR), pages 275–
276. IEEE.
Schrepp, M., Hinderks, A., and Thomaschewski, J. (2014).
Applying the user experience questionnaire (ueq) in
different evaluation scenarios. In International Con-
ference of Design, User Experience, and Usability,
pages 383–392. Springer.
Slater, M., Usoh, M., and Steed, A. (1995). Taking steps:
the influence of a walking technique on presence
in virtual reality. ACM Transactions on Computer-
Human Interaction (TOCHI), 2(3):201–219.
Sorkine, O. (2009). Least-squares rigid motion using svd.
Technical notes, 120(3):52.
Steed, A., Frlston, S., Lopez, M. M., Drummond, J., Pan,
Y., and Swapp, D. (2016). An ‘in the wild’experiment
on presence and embodiment using consumer virtual
reality equipment. IEEE transactions on visualization
and computer graphics, 22(4):1406–1414.
Takayasu, K., Yoshida, K., Mishima, T., Watanabe, M.,
Matsuda, T., and Kinoshita, H. (2019). Upper body
position analysis of different experience level sur-
geons during laparoscopic suturing maneuvers using
optical motion capture. The American Journal of
Surgery, 217(1):12–16.
Waltemate, T., Gall, D., Roth, D., Botsch, M., and
Latoschik, M. E. (2018). The impact of avatar person-
alization and immersion on virtual body ownership,
presence, and emotional response. IEEE transactions
on visualization and computer graphics, 24(4):1643–
1652.
Yuan, Y. and Steed, A. (2010). Is the rubber hand illusion
induced by immersive virtual reality? In 2010 IEEE
Virtual Reality Conference (VR), pages 95–102. IEEE.
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
244
