
As Plain as the Nose on Your Face?
Peter A. C. Varley
a
, Stefania Cristina
b
, Alexandra Bonnici
c
and Kenneth P. Camilleri
d
Department of Systems and Control Engineering, University of Malta, Msida MSD 2080, Malta
Keywords:
Gaze Tracking, Head Pose, Noses, Haar Cascades.
Abstract:
We present an investigation into locating nose tips in 2D images of human faces. Our objective is conference-
room gaze-tracking, in which a presenter can control a presentation or demonstration by gaze from a distance
in the range 2m to 10m. In a first step towards this, we here consider faces in the range 150cm to 300cm. Head
pose is the major contributing component of gaze direction, and nose tip position within the image of the face
is a strong clue to head pose. To facilitate detection of nose tips, we have implemented a combination of two
Haar cascades (one for frontal noses and one for profile noses) with a lower failure rate than existing cascades,
and we have examined a number of ”hand-crafted ferns” for their potential to locate the nose tip within the
nose-like regions returned by our Haar cascades
1 INTRODUCTION
Our objective is conference-room gaze-tracking, in
which a presenter can control a presentation or
demonstration by gaze from a distance in the range
2m to 10m.
Current gaze-tracking systems typically track the
gaze of a computer user, usually seated about 70cm
from the camera. Some interactive displays such as
(Zhang, 2016) assume that the user is 130cm from
the camera. In a first step towards extending this, we
consider faces in the range 150cm to 300cm. Many
images from the Labelled Faces in the Wild dataset
(Huang et al., 2007), such as those in Figure 1, are
typical of faces in this range.
There are two components which combine to give
a gaze estimate: head pose, and eyeball rotation. In
this short paper, we deal only with head pose. The
geometry of combining head pose and eyeball rota-
tion to obtain a full gaze vector is well-known - see
(for example) (Ishikawa et al., 2004). Readers in-
terested in eyeball rotation and in gaze-tracking in
general may wish to consult (Cristina and Camilleri,
2018), and those interested in a comparison of differ-
ent face-finding methods may wish to consult (Rah-
mad et al., 2020).
Of the two, head pose is the major contributor, as
a
https://orcid.org/0000-0003-4181-9234
b
https://orcid.org/0000-0003-4617-7998
c
https://orcid.org/0000-0002-6580-3424
d
https://orcid.org/0000-0003-0436-6408
the head has a wider range of movement than the eye-
ball, and it is also easier to detect as the head is larger
and more visible. We may also wish to allow for a
failsafe mode in which we use head pose alone when
pupil gaze direction is unavailable - users may even
prefer this, as they can control the screen with head
pose while making eye contact with their audience.
Head pose can be estimated by locating and com-
bining facial features in an image, but which features
should be chosen? Some facial features are not even
visible in images from 10m away (irises are a few
pixels across at most, and pupils could disappear en-
tirely). And people talk in conference rooms, so mu-
table features such as the mouth are also unreliable.
The nose is part of the rigid structure of the head
- it is possible to gesture with the nose, but people do
not typically do so when giving presentations - and it
is proverbially the most visible feature of the face. In
this paper, we only consider methods which use the
nose (possibly in combination with other features) to
determine head pose.
Weidenbacher (Weidenbacher et al., 2006) uses
ten feature points to determine head pose: three from
each eye, the two nostrils, and the corners of the
mouth.
Fasthpe (Sapienza and Camilleri, 2014) uses the
nose tip and a triangle formed by eyes and mouth to
predict head pose. The principal advantage of this
over previous methods is that the nose tip is the fea-
ture furthest from the plane of the eyes and mouth,
so it is more informative about 3D than anything else.
Varley, P., Cristina, S., Bonnici, A. and Camilleri, K.
As Plain as the Nose on Your Face?.
DOI: 10.5220/0010315404710479
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 4: VISAPP, pages
471-479
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
471

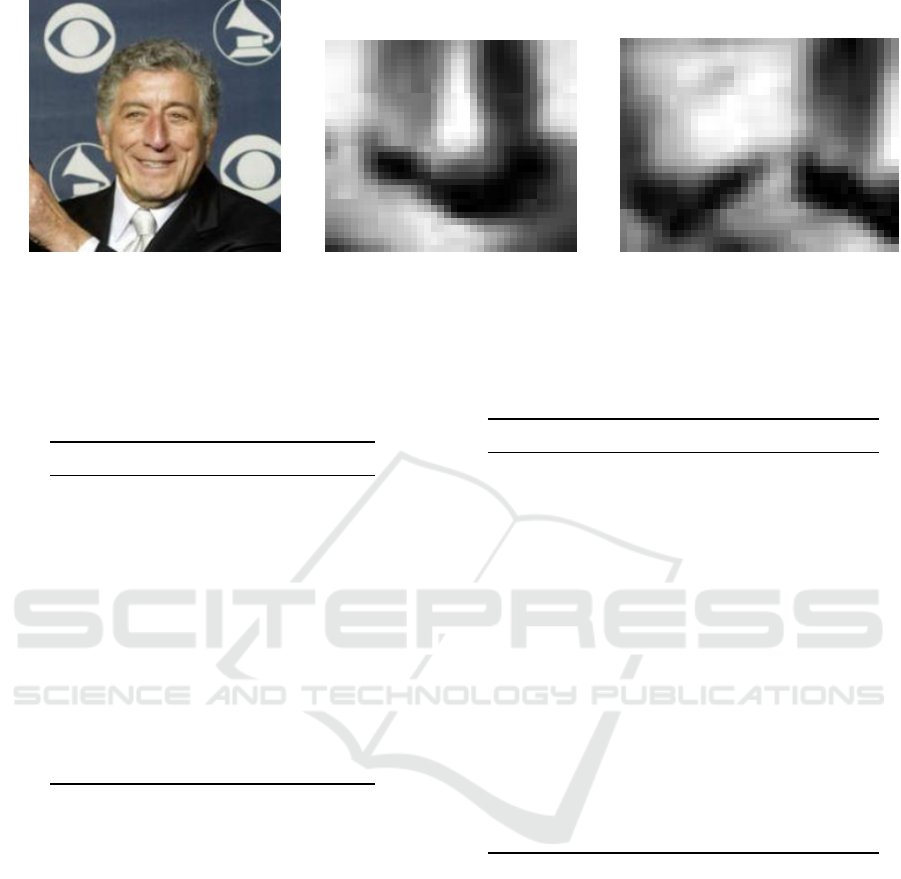
(a) (b) (c)
Figure 1: From LFW (a) Frontal Nose, (b) Profile Nose, (c) Ambiguous Nose.
A further advantage is that there is only one calibra-
tion parameter needed, distance of nose tip from eye-
mouth plane, and it has an obvious geometric mean-
ing and is easily and unobtrusively determined for a
new user. On the other hand, although fitting a tetra-
hedron to four points is straightforward, it is not ro-
bust to bad points.
Our planned system will make use of both eye
gaze direction and head pose, and we follow Fasthpe
in using the nose tip to determine head pose. For this,
we need an accurate position of the nose tip in the
image. This paper considers various methods of de-
termining the nose tip position, makes recommenda-
tions, and presents preliminary results.
This paper does not discuss how to convert nose
tip position to a gaze prediction. This is something we
shall test in due course. Options range from simply
projecting a vector from a reference point to the nose
tip, as in Figure 2, to compiling a feature vector (a list
of facial landmarks and their locations) and using this
as an auxiliary input to a neural network, as in (Lu and
Chen, 2016) and (Zhang, 2016), or even to creating a
full 2.5D head model (Caunce et al., 2009).
Ergonomically, any strictly monotonic function
which converts a nose tip position to a gaze predic-
tion is potentially satisfactory, and indeed it is pos-
sible that users may prefer to make exaggerated ges-
tures rather than geometrically-accurate gestures.
On a practical note: we prefer methods which can
be retrained quickly on a portable computer. Should
it happen that a demonstration fails in the morning
(which is always possible with a prototype), we would
wish to gather training data from our potential cus-
tomers during the coffee break, add this to our training
dataset, retrain the system over the lunch break, and
demonstrate a working system in the afternoon, all
without having to return to the laboratory to use com-
puters with more parallel processing capability but no
mobility.
We also prefer methods which are easily repli-
cated: other researchers should be able to reproduce
(or even improve on!) our results.
Section 2 describes the characteristics of noses in
images of human faces. Section 3 lists and discusses
previous work. Section 4 describes our own investi-
gations to date and presents preliminary results. Sec-
tion 5 presents our conclusions and plans for further
development of our ideas.
1.1 Terminology
By convention, left and right are from the user’s point
of view, so the left eye and left nostril are those on the
right of the image.
2 NOSES IN IMAGES
The three images in Figure 1 are taken from the LFW
Dataset (Huang et al., 2007). This is a reasonable
source of training data: images are 250x250, the face
of the subject is usually central, and the size of the
face is usually between 60x60 and 130x130 pixels,
with the median being 110x110. Such images would
be typical of a webcam image of a subject at a dis-
tance of between 1.5m and 3m.
We maintain two datasets. Our reference dataset.
used for testing, comprises 3007 sample images (1474
female, 1533 male) selected from the LFW dataset
such that each image portrays a different person;
some images contain additional faces in the back-
ground, and where these are detected too, they are
included in our test results. Our primary dataset is a
subset of 100 images (51 female, 49 male) taken from
the reference dataset and used during development -
the three images in Figure 1 are among those included
in our primary dataset. A total of 502 images, includ-
ing all of those in the primary dataset, have been fully
labelled by eye. Both primary and reference datasets
include wide varieties of lighting intensities and di-
rections.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
472
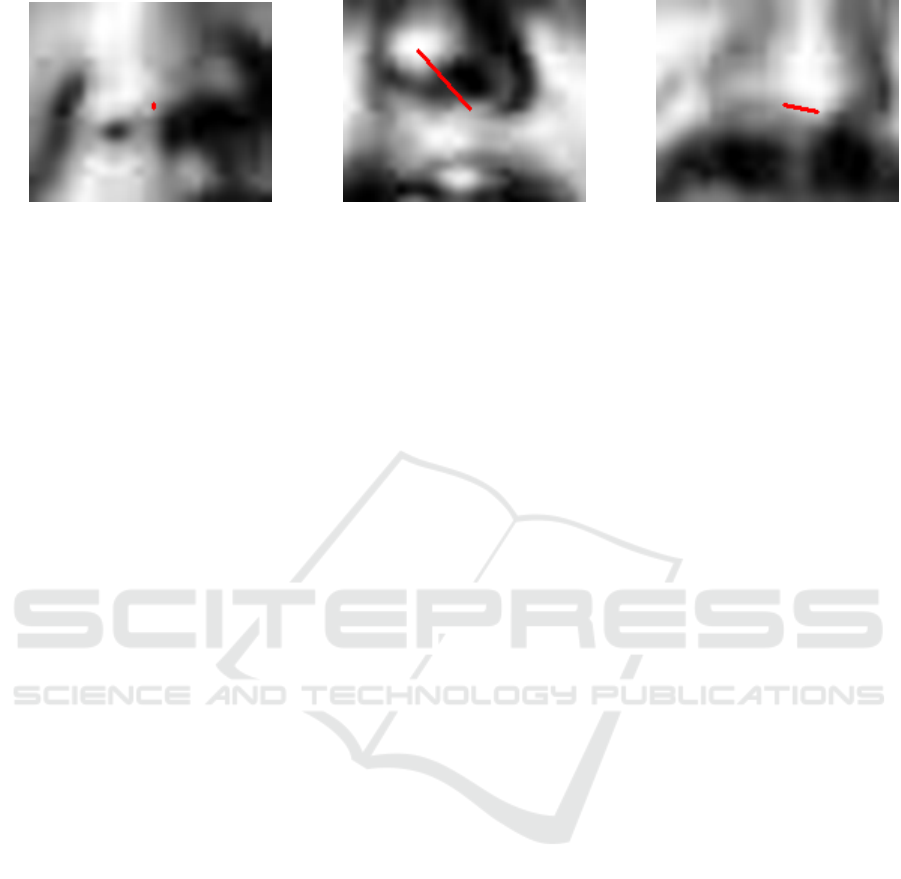
(a) (b) (c)
Figure 2: Nose Regions produced by MCS Nose Cascade from images in Figure 1.
It can be seen that in all three the nose gives a
good estimation of the head pose, and the head pose
gives a good estimation of the gaze. Even in more
complex cases where the eye direction and the head
pose are not in agreement, the head pose is still the
major component of the gaze direction, and we can
still obtain a good estimate of it from the nose.
Unlike eyeballs, which are always roughly spher-
ical so present the same appearance from any view-
point, noses are a peculiar and distinctive shape -
frontal noses (e.g. Figure 1a) and profile noses (e.g.
Figure 1b) can look very different in 2D images. And
what are we to make of Figure 1c, which is mid-way
between frontal and profile? Perhaps we can turn this
difficulty into an advantage - an accurate assessment
of where the nose is pointing will give us a very good
estimate of head pose.
3 METHODS
There are several established methods for detect-
ing features in images. Use of Haar Cascades is
widespread, not least because of their inclusion in
OpenCV (OpenCV, 2015). In recent years, Ferns
(Cao et al., 2012) have become popular.
3.1 Haar Cascades
Haar Cascades were introduced by (Viola and Jones,
2004), who described their innovation as “reminis-
cent of Haar basis functions”, with additions and im-
provements by (Lienhart and Maydt, 2002), who cre-
ated one of the most successful cascade classifiers, the
“alt2” face detector.
The simplest form of Cascade Classifier is a lin-
ear sequence of Stage Classifiers (Viola and Jones,
2004). The number of Stage Classifiers is specified by
the user, and is typically around 20 (OpenCV, 2015),
(Castrill
´
on et al., 2007).
Each Stage Classifier is a Haar Feature, a function
which compares the sums of pixel intensities in adja-
cent rectangles. There are five basic Haar Features
(Viola and Jones, 2004): four of these use 2 rectan-
gles; the fifth uses 4. Tilted features at 45
◦
(Lien-
hart and Maydt, 2002) and symmetrical features can
be added if needed. To speed up this process, (Vi-
ola and Jones, 2004) introduced “intensity images”,
two-dimensional arrays in which each element con-
tains the sum of the intensities of pixels above and to
the left of that point in the original image; thus, calcu-
lating (T L +BR)−(T R +BL) from the four points at
the corners of a rectangle in the intensity image gives
the sum of all pixels in the the same rectangle in the
original image. Haar Features are weighted accord-
ing to their success at accepting positive samples and
rejecting negative samples.
Stages after the first use Adaptive Boosting (Vi-
ola and Jones, 2004), in which successful Haar Fea-
ture/sample results in earlier stages are given a re-
duced weight when creating later stages, as their
job has already been done. Haar Cascades have
been used successfully to detect faces in images
(OpenCV, 2015) and to detect eyes and mouths in
faces (OpenCV, 2015), (Castrill
´
on et al., 2007).
One would think that, as noses are a peculiar and
distinctive shape, it should be easy to train Haar cas-
cades to find them, as that is the sort of thing which
Haar cascades are good at. It is not so easy in practice.
For example, Castrill
´
on’s ”MCS” Haar nose cascade
(Castrill
´
on et al., 2007) is not reliable, possibly be-
cause of the decision to use 18x15 pixel samples - we
believe that this is too small. Its unequivocal success
rate is below 50% for the reference dataset described
above, as even when it finds exactly one “nose”, it
might be an eye, a forehead or a cheek rather than a
nose.
By adding common-sense pruning rules (the nose
is the one below the eyes and above the mouth) it is
possible to improve the success rate.
Table 1 shows the number of regions found by
the MCS nose cascade both without and with prun-
ing rules. It should be remembered that the num-
ber of nose-like regions found is an upper bound on
the number of successes, and the true number of suc-
cesses is lower, as we shall see in Section 4.
As Plain as the Nose on Your Face?
473
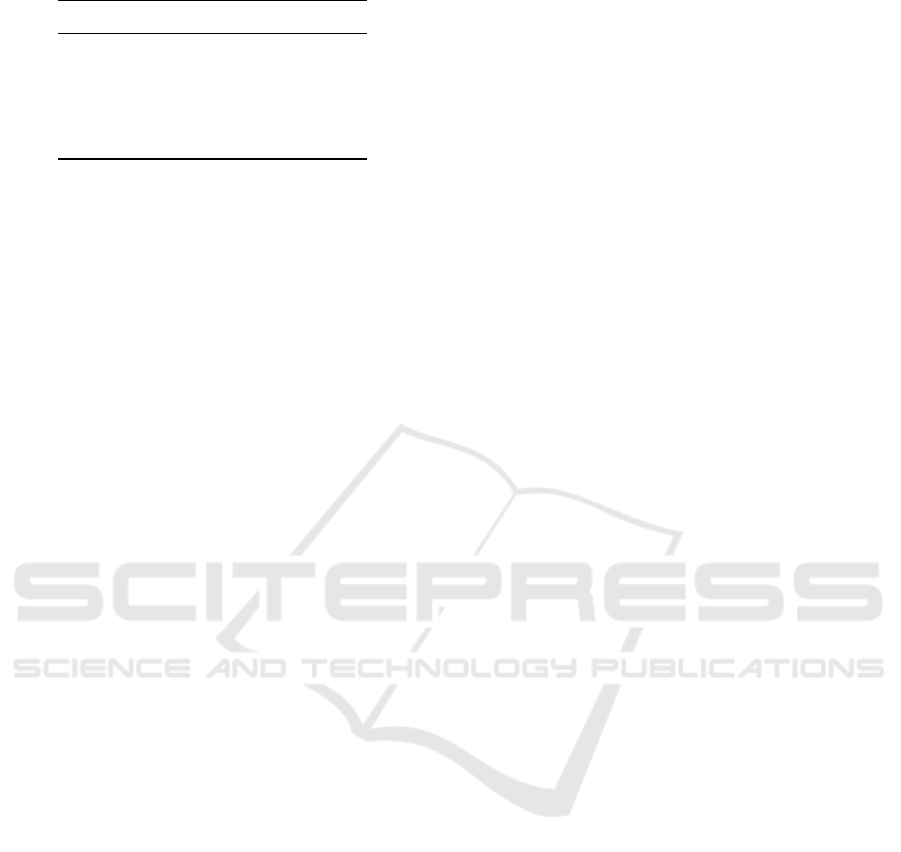
Table 1: Results (MCS cascade).
Regions MCS MCS & pruning
0 545 545
1 2361 2720
2 343 15
3 29 -
4 2 -
When successful, the MCS nose cascade typically
returns a rectangle which is 30% of the width and 25%
of the height of the face. The mid-point is typically
60% down from the top of the face. Resolving any
remaining ambiguity by choosing the one nearest this
ideal position is usually correct.
The images in Figure 2 were the nose regions re-
turned by applying the MCS nose cascade to Figure 1
(blurred to remove speckling). As the red lines super-
imposed on these images show, for frontal noses, the
nose tip is close to the centre of the nose region, but
for profile noses, it is not; this is typical. Statistically,
the rule that the nose tip can be found at the centre
of the nose region is reasonably reliable, but the cases
where it fails are those where it is needed most.
In assessing the reliability of nose tip predictions,
we compare the prediction with our known nose la-
bellings. Errors of ±1 pixel in any direction are to
be expected and count as success. Errors of up to ±4
pixels are regarded as “near misses” - the method has
found the correct area but has not located it accurately.
Errors greater than ±4 pixels suggest that the method
has not found the correct area and are regarded as fail-
ure. Of our labelled images, the centres of the nose-
like regions found by the MCS nose cascade, pruned
as described earlier, are: 146 (29%) successful, 277
(55%) near misses, and 79 (16%) failures.
If Haar cascades are to be used for finding nose
tips, it seems necessary to treat frontal and profile
noses separately, but this is not always straightfor-
ward. Sometimes, the distinction between frontal and
profile noses is clear. Figure 1a is clearly frontal. Fig-
ure 1b is clearly profile. But what of Figure 1c? We
classify this as a profile nose, as part of the nose fea-
ture is self-occluded, but in terms of its general ap-
pearance, it looks more like a frontal nose.
3.2 Random Ferns
A Fern (Ozuysal et al., 2010) is a hint as to the likely
location of a feature. Individual ferns need not be re-
liable - as long as there are many of them and they
are mutually independent, the consensus is reliable
(Cao et al., 2012). Cao recommends Ferns chosen
at random, with the area from which they are chosen
shrinking gradually as the estimate of the position of
the feature improves.
The conceptual similarities between Haar Fea-
tures and Ferns are clear: both are weighted sums
of pixel intensity difference operations (2 or 3 such
operations for Haar Features, a configurable number,
optimally 5, for Ferns).
The main differences between Haar Features and
Ferns are:
• Haar Features are intended for use in sequences,
to take advantage of adaptive boosting; Ferns
are intended for use concurrently, using a voting
method to choose between their various predic-
tions
• Haar Features are created and analysed systemati-
cally; Ferns are drawn from an initial pool chosen
randomly. (As a consequence, creation of Fern is
much faster.)
• The chosen pixels in Ferns can be anywhere; the
chosen pixel sums in Haar Features are always
those of adjacent rectangles. (As a consequence,
Ferns are more flexible.)
• The chosen pixels in Ferns can even be in other re-
gions of the image; the chosen rectangles in Haar
Features are always within the feature patch.
• Ferns are chosen according to their performance
in positive samples; Haar Features are chosen ac-
cording to their performance in both positive and
negative samples.
We argue that, while both methods have advan-
tages and disadvantages, it is clear which is which. If
speed is crucial, the exhaustive analysis of Haar Fea-
tures is a disadvantage, but the use of adaptive boost-
ing is an advantage. The flexibility of Ferns is a clear
advantage over the inflexibility of Haar Features, but
Cao’s choice of including pixels from other regions of
the image in Ferns makes them vulnerable to changes
of lighting conditions, so is a disadvantage. And the
use of negative as well as positive samples when eval-
uating Haar Features is clearly beneficial.
Thus, while Haar Features have their deficiencies,
abandoning them entirely in favour of Cao’s approach
is not the way to go.
We might also add a theoretical objection to Cao’s
idea. It is true that, as the initial pool of Ferns was cre-
ated randomly, they are mutually independent. But
the selection process is not random, it is based on
image data, and this introduces mutual dependence
within the final pool of selected Ferns, and we can-
not guarantee that a consensus of mutually dependent
recommendations is better than any individual recom-
mendation. We shall return to this idea in the next
section.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
474
(a) (b)
Figure 3: A Symmetrical Nose (a) Original Image, (b) Self-Symmetry Output.
3.3 Hand-crafted Ferns
“Hand-crafted” ferns are the product of intelligent
observation rather than random selection (and (Cao
et al., 2012) deprecates their use for this reason). To
some extent, they can be considered to be related tech-
niques in the same general category as Haar Cascades
and Random Ferns, inheriting the best aspects of both:
as self-contained units, they can be used in sequence
or in parallel; their creation and analysis can be as sys-
tematic as their designer chooses; and while rectangu-
lar groups of pixels are faster to process than random
pixels, the rectangles need not be adjacent.
In this section, we discuss some ideas. Implemen-
tation recommendations and numerical results are to
be found in Section 4.
One idea which could find the nose tip is simply
to pick the brightest part of the nose region, on the
reasoning that as the nose sticks out furthest from the
face plane, it is most likely to catch the light, as can
be seen in Figures 2b and 2c.
Working on the same lines, the brightness gradient
down from the tip of the nose should be steepest, as
the base of the nose is occluded and dark. This is still
vulnerable to teeth and cheeks, and if the nose region
is too large, it can even detect the white of the eye.
A related idea is to locate nostrils at the darkest
two patches of the region and work from there. Pre-
liminary results suggest that this is very sensitive to
lighting conditions. One of the nostrils is usually the
darkest patch in the region. For frontal noses, the
second-darkest area could be anywhere - there is no
consistency. For profile noses, the second-darkest re-
gion is so often the shadow of the wing of the darker
side of the nose (as can be seen in Figure 2b) that this
could be used as a reliable clue to the nose structure.
A combination of the previous two ideas, in which
we compare the brightness of a single region with the
darkness of two regions diagonally below it, has been
found to be more successful than either.
For completeness, we also analysed a number of
other options, the most successful of which was the
inverse idea, comparing the brightness of a single
region with the darkness of two regions diagonally
above it. This too has merits - the depressions diago-
nally above the nose tip fail to catch the light.
The above ideas are clearly not mutually indepen-
dent, as they all start by assuming a bright area (abso-
lute or relative) around the nose tip. Ideally, we would
wish to combine one or more of these with unrelated
methods.
One independent idea would be to find the x-
coordinate of the nose tip by finding a vertical plane
of mirror symmetry through the nose region. Where
the subject of the image has a particularly symmetri-
cal nose (such as Figure 3a), self-symmetry of pixel
intensities gives useful results (a clear, almost-vertical
line can be seen in Figure 3b). However, this idea is
particularly sensitive to lighting conditions and can-
not be recommended.
We have also experimented with using self-
symmetry of intensity gradients rather than self-
symmetry of intensities. This was unsuccessful and
has nothing to recommend it.
3.4 Other Methods
Artificial intelligence methods such as Convolutional
Neural Networks could be used very effectively, as
taking account of subtle cues elsewhere in an image
is what they are good at, but using a CNN just to find a
nose tip seems like overkill - finding the nose tip will
be just one small component (albeit the most difficult
to implement) of a much larger system.
Furthermore, the advantages of CNNs do not com-
pensate for the practical disadvantage mentioned in
Section 1. Retraining CNNs is slow and resource-
intensive, often requires multiple-processor hardware,
and can take hours or even days. For our purposes, a
system which takes 30 minutes to retrain on a lap-
top computer and works adequately thereafter is bet-
ter than a system which may work somewhat better
As Plain as the Nose on Your Face?
475
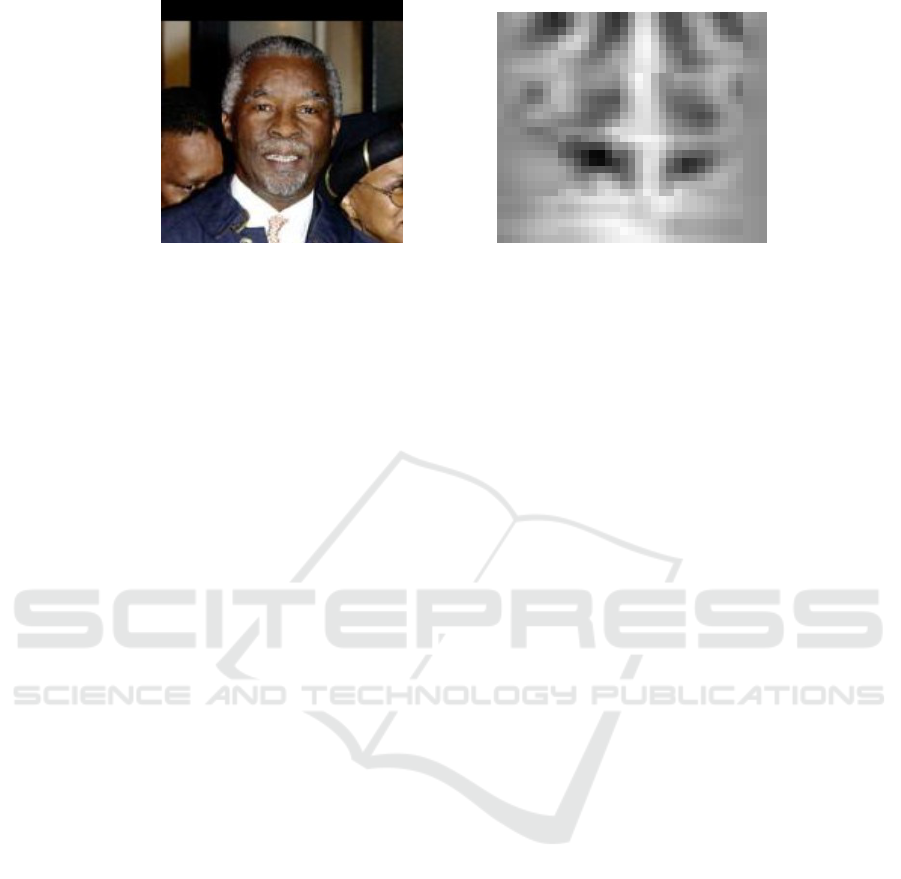
(a) (b) (c)
Figure 4: Problematic Face (a) Original Image, (b) Not a Nose (MCS), (c) Frontal Nose.
but could require 30 hours, or specialist hardware, or
both.
4 INVESTIGATION
We have trained our own nose cascades using images
taken from the LFW dataset and labelled by eye. We
trained two cascades using positive samples with the
nose tip at the centre, one for frontal noses and one
for profile noses (using symmetrical cascades so as
to allow for both left-facing and right-facing profile
noses).
The frontal face cascade is sized at 25x17 pixels
(see Section 4.1). It was created using 276 positive
and 648 negative samples. It has 16 stages. It took 37
minutes to create on a home laptop. The profile face
cascade is sized at 35x19 pixels - it is larger as it may
have to contain the whole nose in little more than half
of its region. It was created using 155 positive and
533 negative samples. It has 18 stages. It took 78
minutes to create on a home laptop.
When creating cascades, we used the entire pri-
mary dataset, plus additional images from the refer-
ence dataset as required to improve cascade perfor-
mance. As labelling was by eye, nose tip position is
often subjective and errors of ±1 pixel are to be ex-
pected.
Builds are tested initially using the primary
dataset, and successful builds are then tested more
thoroughly using the reference dataset.
In addition, we have a “rogue’s gallery” of 10
faces (4 female, 6 male, including Figures 4a and 5a)
which were particularly troublesome during develop-
ment and which received special attention. These do
not overlap with the primary dataset.
Numerical results for these cascades are to be
found in Section 4.2. It is clear that, when both frontal
and profile cascades find the same region, we need a
better way of combining the two predictions, as either
cascade alone is better at locating the nose tip than is
combining the two.
While we were developing our cascades, it was
the face shown in Figure 4a which gave the most false
positives, both before and after pruning. MCS (Cas-
trill
´
on et al., 2007) finds just a single “nose” region
for this face, the one shown in Figure 4b - unfortu-
nately, however nose-like it may appear, this is his
right cheek. The real nose, shown in Figure 4c, is one
of several nose-like regions found by our cascades.
The face shown in Figure 5a is the one which
currently gives the most false positives after pruning.
MCS (Castrill
´
on et al., 2007) finds two “nose” regions
for this face, but the false one is pruned out, leav-
ing the region shown in Figure 5b. Our cascades find
more possibilities, including not only the one in Fig-
ure 5b but two in which one nostril and one fold of
the cheek are interpreted as two nostrils, as shown in
Figure 5c.
Even knowing that the nose is on the right-hand
side of Figure 5c, it is hard not to interpret the feature
on the left-hand side of the image as a second nose.
Pruning cheeks is not straightforward. Most of
them lie within a bounding box formed from the out-
side edges of the eye regions and the edges of the
mouth region, and many of them even lie within a
bounding box formed from the centres of the eye re-
gions and the edges of the mouth region. Shrinking
the bounding box further could exclude many genuine
noses.
Since our cascade combination finds the correct
nose position (albeit alongside many false positives)
and MCS does not, the result for Figure 4 must be
counted as a modest success. But there is clearly
much more work still to be done before we have a
reliable nose-finder.
4.1 Cascade Region Size
In support of our belief that 18x15 pixels is too small,
we offer the following analysis for frontal noses.
We created three frontal nose cascades, using the
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
476
(a) (b) (c)
Figure 5: Problematic Face (a) Original Image, (b) Nose Region (MCS), (c) Two Noses?
same 276 positive and 648 negative samples. The cas-
cades were sized at 19x13, 25x17 and 31x21 pixels.
The numbers of nose-like regions found by each of
these cascades are shown in Table 2.
Table 2: Frontal Nose Cascades.
# Regions 19x13 25x19 31x21
0 1260 480 391
1 1275 985 452
2 562 879 569
3 157 551 568
4 22 241 468
5 4 106 359
6 - 29 211
7 - 9 138
8 - - 66
9 - - 30
10 - - 17
11 - - 9
12 - - 2
Clearly, using larger patch sizes reduces the num-
ber of failures but increases the number of false pos-
itives. Our feeling is that 25x17 is optimal, and we
hypothesise that this is because it is the typical size of
noses in the LFW dataset - smaller sample sizes lose
information, but larger sample sizes do not gain much
information.
The effects on system performance will have to
be tested during integration - perhaps, in our final
system, we should have several cascades of differ-
ent sample sizes prepared in advance, and choose be-
tween them according to the size of the face.
4.2 Combined Cascade Performance
Table 3 shows the numbers of nose-like regions found
by (a) our profile nose cascade alone, (b) the com-
bination of frontal and profile nose cascades without
pruning, and (c) the combination with pruning. The
key result is that the number of images with 0 nose-
like regions is less than half of that using the MCS
cascade.
Table 3: Profile and Combined Nose Cascades.
# Regions Profile Combined + Pruning
0 414 263 263
1 765 215 632
2 841 419 1832
3 642 552 443
4 363 512 87
5 178 453 22
6 49 324 1
7 23 242 -
8 4 140 -
9 1 88 -
10 - 47 -
11 - 13 -
12 - 7 -
13 - 3 -
14 - 1 -
15 - 0 -
16 - 1 -
4.3 Hand-crafted Ferns
We analysed the performance of a number of
multiple-boxcar methods, all of which sum pixel in-
tensities in square patches, and compared their per-
formance with the simple ideas presented above. In
order to ensure that they are independent of light-
ing conditions, we limited our investigations to pixel-
intensity-difference operations (reducing dependence
on lighting intensity) between boxcars which are (a)
in horizontally-symmetrical patterns (reducing de-
pendence on lighting direction) and (b) in which the
brightest region spans the line of symmetry (regard-
less of lighting, the nose tip protrudes furthest from
the face plane and will catch the light best). We
present them in ascending order of complexity. Box-
As Plain as the Nose on Your Face?
477

car sizes are optimised for 250x250 images in which
the face is about 110x110 pixels, and should be varied
in proportion for larger or smaller faces. Results were
obtained using combined frontal and profile nose cas-
cades, with pruning, and 502 labelled noses.
Fern C is the idea already presented: the nose tip
is at the centre of the region found by the Haar cas-
cades. Of our 502 labelled noses, 153 (29%) were
successful, 205 (39%) were near misses, and 144
(29%) were failures.
Fern B is a single boxcar: we find the brightest 9x9
square in the nose region. The nose tip is 7 pixels be-
low the centre of the square. This Fern is based on the
assumption that the nose tip will catch the light as it
sticks out. Of our labelled noses, 67 (13%) were suc-
cessful, 189 (38%) were near misses, and 246 (49%)
were failures.
Fern D is a double-boxcar: we find the pair of 7x7
squares M and N where M is immediately above N
which maximises (ΣM − ΣN). The nose tip is 2 pix-
els below the centre of M. This Fern is based on the
assumption that the bottom of the nose will usually
be dark as lighting is usually from above. Of our la-
belled noses, 98 (20%) were successful, 147 (29%)
were near-misses, and 257 (51%) were failures.
Fern V is a vertical triple-boxcar: we find the trio
of 7x7 squares L, M and N where M is immediately
below L and immediately above N which maximises
(2ΣM − ΣL − ΣN). The nose tip is 3 pixels below
the centre of square M. The assumption behind this
Fern is that even if the nose tip is not bright in abso-
lute terms, it will nevertheless be brighter than its sur-
roundings. Of our labelled noses, 87 (17%) were suc-
cessful, 123 (25%) were near misses, and 292 (58%)
were failures.
Fern H is a horizontal triple-boxcar: we find the
trio of 9x9 squares L, M and N where L and N
are immediately either side of M which maximises
(2ΣM − ΣL − ΣN). The nose tip is at the centre of
M. The assumption behind this Fern is that even if
the nose tip is not bright in absolute terms, it will be
bright relative to its surroundings. Of our labelled
noses, 57 (11%) were successful, 101 (20%) were
near-misses, and 344 (69%) were failures.
Fern T is a triangular triple-boxcar: we find the
trio of 7x7 squares L, M and N where the centres of
L and N are 3 pixels below and 4 pixels either side of
the centre of M which maximises (2ΣM − ΣL − ΣN).
The nose tip is at the centre of square M. This method
is based on the assumption that nostrils are dark and
are to be found either side of, and slightly below, the
nose tip. Of our labelled noses, 185 (37%) were suc-
cessful, 169 (34%) were near-misses, and 148 (29%)
were failures. Fern T is by far the best of those based
around a central bright square.
Fern U is an inverted triangular triple-boxcar: we
find the trio of 11x11 squares L, M and N where the
centres of L and N are 7 pixels above and 9 pix-
els either side of the centre of M which maximises
(2ΣM − ΣL − ΣN). The nose tip is 6 pixels below the
centre of square M. This fern is based on the assump-
tion that the depressions in the sides of the nose will
be darker than their surroundings as they do not catch
the light. Of our labelled noses, 61 (12%) were suc-
cessful, 183 (36%) were near-misses, and 258 (52%)
were failures.
Ferns are intended to be used together, and it is
their team performance which is most important.
We combined the predictions of the two most
successful ferns, C and T , using a weighted mean.
We might expect both advantages and disadvantages:
where one fern is right and the other is wrong, com-
bining the two will be detrimental, but it can also hap-
pen that the two predictions are near-misses in oppo-
site directions, and combining them results in an ac-
curate prediction. In practice, the results are no better
and no worse at accurate prediction than Fern T (al-
though the binary prediction is slightly better at con-
verting failures to near-misses): 185 (37%) are suc-
cessful, 173 (34%) are near-misses, and 144 (29%)
are failures.
What we want is a neutral arbiter to adjudicate
those cases where the predictions of Ferns C and T
are significantly different. Unfortunately, this is what
we lack: all of our other Ferns are biased towards Fern
T, as they all assume a bright square around the nose
tip.
In terms of individual performance, the next-best
Ferns are D and V , but these both include dark pix-
els below the nose which are also included in Fern T.
They are not neutral arbiters. Thus the ternary combi-
nation we tested combined Fern C with Ferns T and
U; these two may share the same bright region, but
the dark regions do not overlap.
The three predictions were combined as follows:
(a) weight all predictions according to how reliable
the method is; (b) find the weighted mean of all pre-
dictions; (c) reweight the predictions according to
how close they are to the mean; and (d) recalculate
the weighted mean using the recalculated weights.
The results showed a slight decrease in accurate
prediction, but an increase in near-misses: 180 (36%)
were successful, 183 (36%) were near-misses, and
137 (27%) were failures. This can be explained as
the third fern doing its job successfully when the two
leading ferns make widely-different predictions, but
contributing its own (worse) prediction when the two
leading ferns are already close.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
478

For the time being, we recommend using either
Fern T alone (for speed), or combining this with Fern
C (for somewhat better ability to avoid failures). If
we are to make further progress, we need a new Fern
which is independent of both.
5 CONCLUSION
This remains work in progress: it raises more ques-
tions than it answers. Haar classifiers followed by
”hand-crafted ferns” can usually find the nose tip, but
are there other, faster, more accurate or more reli-
able ways? Is the nose tip the best feature to detect,
or would other parts of the nose (bridge or nostrils)
be better? To what extent can the nose alone deter-
mine head pose? - occluded nostrils mean the user is
looking down, and prominent nostrils mean the user
is looking up, but can this variation be detected with
sufficient accuracy to be useful?
To some extent, our boxcar method combines the
advantages of Haar Features and Random Ferns, but
as a first attempt, it is unlikely to be optimal. A deeper
study would be welcome, but this would require a re-
turn to first principles and is work for the future.
The results in Section 4 demonstrate that (a) our
combined cascade fails less often than MCS (Cas-
trill
´
on et al., 2007), and (b) it does not insist on a
wrong interpretation of problematic faces such as Fig-
ure 4a. This is progress. Nevertheless, there is clearly
much more work still to be done before we have a
reliable nose-finder.
The target for on-the-spot retraining has not been
met, particularly for profile noses. While we are
waiting for faster portable computers to become
widespread, we may have to accept that on-the-spot
retraining is limited to frontal noses.
ACKNOWLEDGEMENTS
The authors wish to acknowledge the project: “Set-
ting up of transdisciplinary research and knowledge
exchange (TRAKE) complex at the University of
Malta (ERDF.01.124)”, which is co-financed by the
European Union through the European Regional De-
velopment Fund 2014–2020.
REFERENCES
Cao, X., Wei, Y., Wen, F., and Sun, J. (2012). Face align-
ment by explicit shape regression. In CVPR, pages
2887–2894.
Castrill
´
on, M., D
´
eniz, O., Hern
´
andez, M., and Guerra, C.
(2007). Encara2: Real-time detection of multiple
faces at different resolutions in video streams. In Jour-
nal of Visual Communication and Image Representa-
tion Vol 18 No 2, pages 130–140.
Caunce, A., Cristinacce, D., Taylor, C., and Cootes, T. F.
(2009). Locating facial features and pose estimation
using a 3d shape model. In ISVC09.
Cristina, S. and Camilleri, K. P. (2018). Unobtrusive and
pervasive video-based eye-gaze tracking. In Image
and Vision Computing 74, pages 21–40.
Huang, G. B., Ramesh, M., Berg, T., and Learned-Miller,
E. (2007). Labeled faces in the wild: A database for
studying face recognition in unconstrained environ-
ments. Technical Report 07-49, University of Mas-
sachusetts, Amherst.
Ishikawa, T., Baker, S., Matthews, I., and Kanade, T.
(2004). Passive driver gaze tracking with active ap-
pearance models. In Proceedings of the 11th World
Congress on Intelligent Transportation Systems.
Lienhart, R. and Maydt, J. (2002). An extended set of haar-
like features for rapid object detection. In Proceed-
ings. 2002 International Conference on Image Pro-
cessing volume 1, pages I–900. IEEE.
Lu, F. and Chen, Y. (2016). Person-independent eye gaze
prediction from eye images using patch-based fea-
tures. In Neurocomputing (NC).
OpenCV (2015). Open Source Computer Vision Library.
Ozuysal, M., Calonder, M., Lepetit, V., and Fua, P. (2010).
Fast key-point recognition using random ferns. In
IEEE Transactions on Pattern Analysis and Machine
Intelligence,32(3), pages 448–461.
Rahmad, C., Andrie, R., Putra, D., Dharma, I., Darmono,
H., and Muhiqqin, I. (2020). Comparison of viola-
jones haar cascade classifier and histogram of oriented
gradients (hog) for face detection. In IOP Confer-
ence Series: Materials Science and Engineering. 732.
012038.
Sapienza, M. and Camilleri, K. P. (2014). Fasthpe: A recipe
for quick head pose estimation. Technical Report TR-
SCE-2014-01, University of Malta.
Viola, P. and Jones, M. (2004). Robust real-time face de-
tection. In International Journal of Computer Vision,
57(2), pages 137–154.
Weidenbacher, U., Layher, G., Bayerl, P., and Neumann,
H. (2006). Detection of head pose and gaze direction
for human-computer interaction. In Perception and
Interactive Technologies. PIT.
Zhang, Y. (2016). Eye tracking and gaze interface design
for pervasive displays. PhD thesis, University of Lan-
caster.
As Plain as the Nose on Your Face?
479
