Feature Sharing Cooperative Network for Semantic Segmentation
Ryota Ikedo and Kazuhiro Hotta
Meijo University, Japan
Keywords: Semantic Segmentation, Cooperative Network, Ensemble.
Abstract: In recent years, deep neural networks have achieved high accuracy in the field of image recognition. By
inspired from human learning method, we propose a semantic segmentation method using cooperative
learning which shares the information resembling a group learning. We use two same networks and paths for
sending feature maps between two networks. Two networks are trained simultaneously. By sharing feature
maps, one of two networks can obtain the information that cannot be obtained by a single network. In addition,
in order to enhance the degree of cooperation, we propose two kinds of methods that connect only the same
layer and multiple layers. We evaluated our proposed idea on two kinds of networks. One is Dual Attention
Network (DANet) and the other one is DeepLabv3+. The proposed method achieved better segmentation
accuracy than the conventional single network and ensemble of networks.
1 INTRODUCTION
Convolutional Neural Network (CNN) (Krizhevsky,
A., 2012) achieved high accuracy in various kinds of
image recognition problems such as image
classification (Szegedy, C., 2015), object detection
(Redmon, J., 2016), pose estimation (Cao, Z., 2018)
etc. In addition, semantic segmentation assigns class
labels to all pixels in an input image. This task
recognizes various classes at pixel level. Semantic
segmentation using CNN is also applied to
cartography (Isola, P., 2017), automatic driving
(Chen, L.C., 2018), medicine and cell biology
(Havaei, M., 2017). CNN obtained high level feature
by aggregating local features. In recent years, some
works based on Fully Convolutional Networks (FCN)
(Long, J., 2015) had been proposed to enhance feature
representations. One of the methods used multi-scale
context fusion (Ding, H., 2018). Some works (Yang,
M., 2018) aggregated multi-scale contexts by using
dilated convolutions and pooling. Some papers (Peng,
C., 2017) extracted richer global context information
by introducing effective decoder to the network. In
other cases, there are some works (Huang, Z., 2019)
using attention mechanisms for semantic
segmentation. As described above, many researchers
aim to improve the segmentation accuracy by various
methods. Here we propose new learning method for
semantic segmentation.
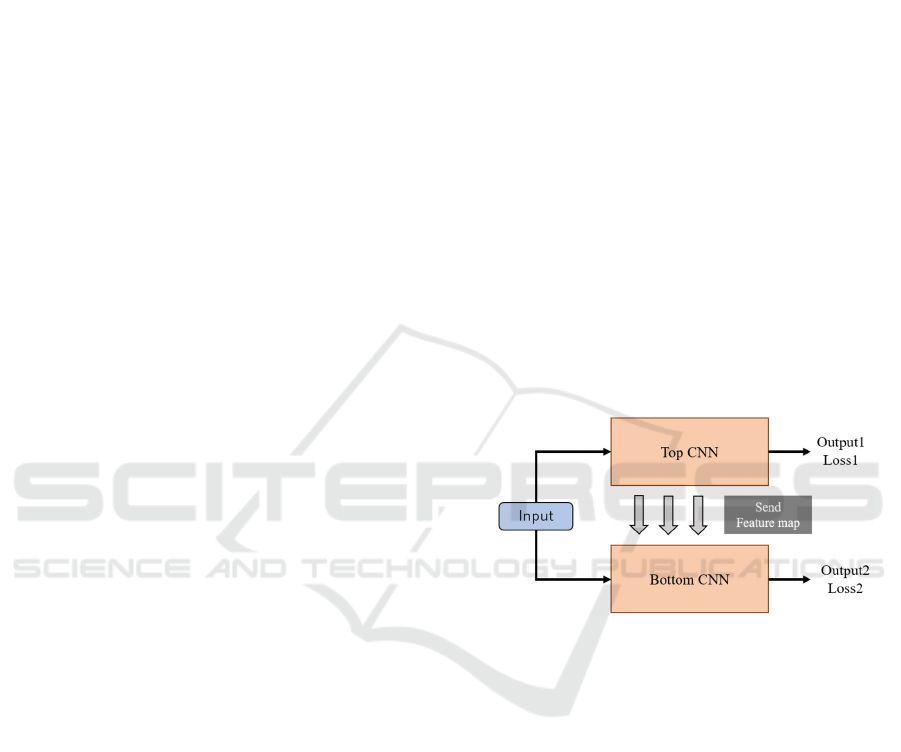
Figure 1: The structure of Cooperative network.
In general, the weights of CNN changes
depending
on the initial values of a random function
even if we use the same network. The feature maps
obtained from the network also change inevitably.
We focused on the difference between networks. We
want to improve the quality of learning by creating a
cooperative relationship between feature maps from
each network. We call this network “cooperative
network”. The overview of our proposed method is
shown in Figure 1. At first, we prepare two same
CNNs and train both CNNs simultaneously. Then we
introduce some paths between two networks, and the
feature maps of top network are sent to the bottom
network. This path allows each network to learn while
sharing the information. In this way, it is possible to
perform cooperative learning that incorporates the
beneficial different information while sharing
information.
Ikedo, R. and Hotta, K.
Feature Sharing Cooperative Network for Semantic Segmentation.
DOI: 10.5220/0010312505770584
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
577-584
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
577
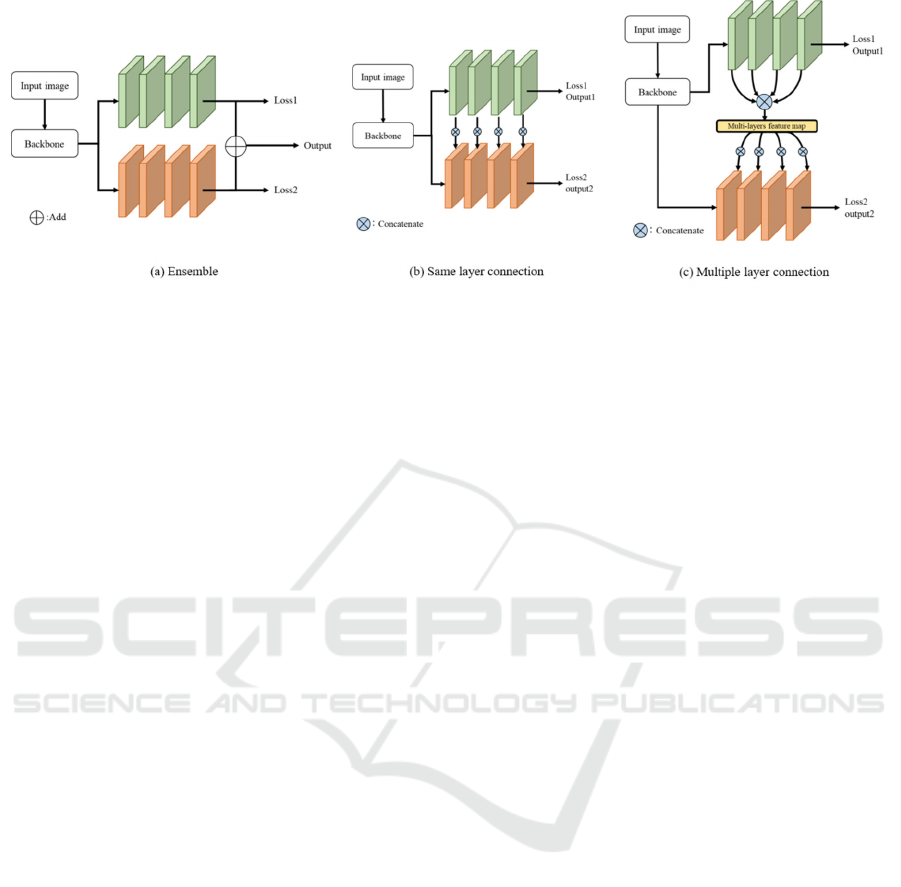
Figure 2: The structure of ensemble network (a) and the proposed cooperative network (b)(c).
We conducted experiments on two famous
networks to confirm the effectiveness of our method.
First, we use Dual Attention Network (DANet) (Fu,
J., 2019) which introduces two kinds of attention
mechanisms. Second, we use DeepLabv3+ (Chen,
L.C., 2018) which applies the depthwise separable
convolution to both atrous spatial pyramid pooling
(ASPP) (Zhang, H., 2018) and decoder modules. In
experiments, we evaluate the proposed method on the
Cityscapes dataset (Cordts, M., 2016) and PASCAL
VOC2012 dataset (Everingham, M., 2010). We
confirmed that our proposed cooperative network
gave higher accuracy than conventional single
network and the ensemble of networks in both
experiments.
This paper is organized as follows. In section 2,
we describe related works. The details of the
proposed method are explained in section 3. In
section 4, we evaluate our proposed cooperative
learning on segmentation tasks. Finally, we describe
conclusion in section 5.
2 RELATED WORK
The state-of-the-art approaches for semantic
segmentation are mainly based on CNNs. The famous
approach is based on FCN structure such as SegNet
(Badrinarayanan, V., 2017), U-net (Ronneberger, O.,
2015) and so on. They are the simple structure of
FCN. In recent years, sharp accuracy improvements
have been driven by new architectures. One of the
problems in semantic segmentation is that CNN lost
spatial information by reducing the resolution in
feature extraction processes. Dilated convolution was
proposed to solve this problem. It can extract features
while preserving spatial information by expanding
receptive fields sparsely without reducing resolution.
In the other works, PSPNet (Zhao, H., 2017) and
DeepLab (Chen, 2018) proposed ASPP module.
ASPP module aggregates feature information at
multiple scales. These works can get multi-scale
contextual information and achieved high accuracy.
Recent some studies adopted attention module
(Takikawa, T., 2019) for segmentation task. For
example, DANet introduced two kinds of attention
modules which capture contextual information in
spatial and channel domains.
U-net used the connections between encoder and
decoder with the same resolution. The connections
send the information of fine objects and correct
position of objects from encoder to decoder, and the
information helps to improve the segmentation
accuracy. This is the cooperation between encoder
and decoder. In this paper, we consider the
cooperation between multiple CNNs in order to
improve the segmentation accuracy further.
Cooperation of networks was used in some tasks.
For example, collaboration learning provides
supplementary information and regularization to each
classifier (Song, G., 2018). Thus, it introduced
collaborative learning methods to help normalize and
improve robustness without additional inference. In
works (Zheng, H., 2018), collaborative network is
used to fuse two kinds of data information. These
works introduced collaborative learning to improve
the accuracy by using multiple data. From these
studies, we focus on different information which each
network has. Therefore, we introduce cooperative
learning method for sharing information that cannot
be obtained by a single network.
3 PROPOSED METHOD
This section describes the details of the proposed
method. We explain the details of networks in section
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
578

3.1. Proposed method 1 which connects only the same
layers in two networks is explained in section 3.2. We
explain the proposed method 2 which connects
different layers in section 3.3.
3.1 Overview
Deep neural network is inspired from neuron
connection of human brain. There are several
approaches that they imitate learning methods of
human for improving accuracy (Lake, B. M., 2015).
We propose cooperative learning for deep neural
network like people who study while exchanging
knowledge among people. In our work, we train two
CNNs at same time while interacting between them.
We show the structure of cooperative learning in
Figure 1. If we prepare two networks and introduce
the connections between two networks, the feature
map obtained from the top network can be sent to the
bottom network, and two feature maps are
concatenated. Since both networks train to solve
segmentation problem, good information for
addressing the task is sent to the bottom network.
Thus, the bottom network can use good feature maps
obtained from the top network for solving task, and
the bottom network focus on the problem that the top
network cannot solve. Since bottom network
concatenates the feature map obtained from top
network, the number of filters in the concatenated
feature map is two time larger than those of the
original network. This is the cooperative learning that
we propose in this paper.
In our method, we adopt the following loss
because our method trains two CNNs separately at the
same time. We use Softmax Cross Entropy for
calculating the loss.
Loss = Loss1 + Loss2, (1)
where Loss1 is the loss for CNN1 and Loss2 is for
CNN2. Both losses are optimized simultaneously. In
this network architecture, we can train two networks
while sharing feature maps that single network cannot
obtain. There are several advantages of cooperative
learning. First, we can increase the amount of useful
information by using feature maps between two
networks. Since the first network solves the
segmentation task, the features for solving the task are
already obtained. Thus, the second network can learn
the task using the information from the first network
as a reference. For the above reasons, we consider
that cooperative learning is effective for improving
accuracy.
In this paper, we propose two connection methods
for cooperative learning. The first connection method
is between same layers. The second connection
method is between multiple layers. These two
methods are explained in the following subsections.
Furthermore, we confirm the effectiveness of
cooperative connection by comparing with ensemble
network. Ensemble network used two same CNNs.
The difference between ensemble network and our
method is shown in Figure 2 (a).
3.2 Same Layer Cooperative Network
We introduce the connection between the
corresponding layers in two same networks. A
structure of the proposed connection is shown in
Figure 2 (b). This connection sends feature map in top
network to the same layer in bottom network. We call
this “same layer connection”. Since two same
networks are used, the same layer connection is the
basic connection of the proposed cooperative
learning. Since the loss for top network is optimized,
the feature maps in top network are effective for
solving the task. The bottom network can obtain those
features for solving the task. Thus, it is expected that
the accuracy will improve.
3.3 Multiple Layer Cooperative
Network
We also propose multiple layer connection method to
give the information obtained at multiple layers in top
network to the bottom network. In general, each layer
in CNN has different kinds of information such as
correct location and semantic information. We give
those various kinds of information in top network to
each layer in bottom network because information in
different layers in top network may be effective to
solve segmentation problem. We call this “multiple
layer connection”. Figure 2 (c) shows the structure.
We give the feature maps from the shallow to
deep layer in top network to certain layer in bottom
network to use both fine and semantic information
well. We extract feature maps from top network and
aggregate those feature maps. By sending the
aggregating feature maps, bottom network obtains the
information that single network and same layer
connection cannot obtain, and it is useful to solve the
task. However, the size of feature maps of multiple
layers is different. Thus, we interpolated the feature
maps to be the same size.
Feature Sharing Cooperative Network for Semantic Segmentation
579
Table 1: Segmentation results on Cityscapes dataset.
Table 2: Segmentation results on PASCALVOC dataset.
4 EXPERIMENTS
This section shows experimental results of
cooperative learning. To evaluate the proposed
method, we carry out comprehensive experiments on
the Cityscapes dataset and the PASCAL VOC2012
dataset using DANet and Deeplabv3+.
We explain the details of datasets in section 4.1 We
explained implementation details in section 4.2 We
show the result of cooperative DANet network in
section 4.3 and the result of cooperative DeepLabv3+
network in section 4.4.
4.1 Datasets
We used two kinds of datasets. The details of each
dataset are described in the following sections.
4.1.1 Cityscapes
This dataset includes images captured by a camera
mounted on a car in Germany. All images are 2,048
× 1,024 pixels in which each pixel has high quality 19
class labels. There are 2,979 images in training set,
500 images in validation set. In this study, we
randomly cropped the images of 768×768 pixels in
train phase. We evaluate our method with validation
dataset.
4.1.2 PASCALVOC2012
This dataset includes the various images. There are
10,582 images in training set, 1,449 images in
validation set and 1,456 images in test set. These
images involve 20 foreground object classes and one
background class. In this study, we use validation set
to get the best model. We evaluate test set using the
model determined by validation phase. In addition,
we randomly cropped the images of 513 × 513 pixels
from training set in training phase, and we cropped
the center region in validation and test phase.
4.2 Implementation Details
We implement our method based on Pytorch. The
cooperative learning network is evaluated for two
kinds of networks; DANet and DeepLabv3+. For the
fair comparison, we evaluated single network and the
proposed method under the same conditions. We
adopt the ResNet101 as backbone in the single
network and cooperative network. It is impossible for
us to use the batchsize in the original paper because
of
the memory size of our GPU. Thus, we changed
Mean IoU
road
sidewalk
building
wall
fence
pole
traffic ligh
t
traffic sig
n
vegetation
terrain
sky
person
rider
car
truck
bus
train
motorcyle
bicycle
Single
75.9
97.9 83.4 92.4
58.6
59.3 66.6 71.9 80.1 92.5 58.6 94.8 83.0 62.8 94.8 80.0 80.6 44.0 62.5 77.6
Ensemble
76.8
97.5 81.4 91.9 58.2 57.2 65.6 71.1 79.7 92.6 61.0 94.6 81.4 56.3 93.8 79.2
85.5 72.9
62.4 77.0
Same layer
connection
79.0
98.0 85.6 92.8
57.5
61.3 69.7 74.8 82.4 93.1 63.1 95.2 84.8 68.0 95.3 80.7
85.5 62.8
71.3 79.6
Maltip le layer
connection
77.1
97.7 84.4 91.9 48.3 58.2 68.0 73.3 81.4 92.7 62.5 95.0 84.1 65.9 94.9 75.7 84.4 59.1 69.3 79.0
Single
77.3
98.7
83.6 92.5 54.4 60.2 64.0 69.5 78.0 92.5 63.8 95.0 81.8 63.0 95.0
82.8
85.3 66.0 65.8 76.4
Ensemble
77.5
97.9 83.5 92.6
55.9
61.2 65.1 70.2 78.9
92.7 65.6
95.0 82.2 63.4 95.0 77.3 84.3 66.2 65.9 76.8
Same layer
connection
77.8
98.0
84.2
92.5 53.8
60.5
65.4 70.9 79.0 92.6 64.0
95.0
82.4
65.0
94.8 73.0 85.1 68.9
68.6
77.4
Maltip le layer
connection
78.3
98.0 84.1
92.8
53.2 60.3
66.2 71.4 80.3
92.6 64.2 94.8
82.8
64.3
95.1
81.0
87.4 75.3
67.5
77.4
DANet
DeepLabv3+
Method
Network Method Mean Iou%
Single
80.04
Ensemble
80.60
Same
81.68
Maltiple
78.12
Single
78.44
Ensemble
78.09
Same
79.86
Maltiple
80.13
DeepLabv3+
DANet
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
580

Figure 3: Segmentation results on the Cityscapes dataset (val). The baseline is DANet.
batchsize and the learning late. Due to the above
constraints, we compare our method with our
implemented results rather than the results in original
papers.
We evaluated four methods. The first one is
original single network such as DANet and
DeeplabV3+. The second one is the ensemble of two
networks. The third one is the proposed method with
the same layer connection. The fourth one is the
proposed method with multiple layer connection. The
accuracy of each single network is used as baseline.
We used intersection over union (IoU) and mean IoU
(mIoU) as evaluation measures.
4.3 Evaluation using DANet
In this experiment, we used cooperative learning with
the same layer connection as shown in Figure 2(b).
DANet has two streams; The one stream is used
position attention and the other stream is used channel
attention. If we use multiple layer connection as
shown Figure2 (c), it is considered that various kinds
of information by each attention are mixed. It will be
bad influence for cooperative learning. Therefore, we
made separate cooperative connections on each
stream. By using such a connection, we can train
cooperative learning of DANet well without mixing
the features by two attention mechanisms.
4.3.1 Results
This section shows the result of cooperative DANet
network. Table1 shows the result on the Cityscapes
dataset and Table 2 shows result on the
PASCALVOC dataset. According to Table 1, the
multiple layer connection improved the accuracy as
well as the same layer connection. In comparison with
single DANet, cooperative learning achieved 79.02%
in mIoU whose improvement is 3.16%. On the other
hand, different layer connection also outperforms the
baseline by 1.28%. Table 1 shows that almost of all
classes improved the accuracy. Especially, the classes
with large area such as road, building, bus were
improved. This demonstrates that cooperative
learning has a benefit to semantic segmentation.
The segmentation results by cooperative networks
are shown in Figure 3. We see that our method can
recognize the details of class such as road, truck and
bus in comparison with baseline. Cooperative
learning can use different feature maps for training.
This improved the accuracy. However, multiple layer
connection gave less performance than the same layer
connection. We use the network using attention
mechanism in this experiment. Attention emphasizes
the important features at each layer for solving the
task. Thus, those features may not be effective for
sending to the other layers. This is because
cooperative learning with multiple layer connection
is worse than that with the same layer connection.
Similarly, the same layer connection is highest for
PASCALVOC dataset as shown in Table 2 while
multiple layer connection gave low accuracy. As
described previously, due to negative attention effect
in multiple layer connection, it gave lower accuracy
for both datasets. Thus, we consider that multiple
layer connection does not give good effect when we
use CNN with attention.
4.4 Evaluation using DeepLabv3+
The basic Deeplabv3+ is divided into an encoder part
including ASPP and a decoder part. As shown in
previous experiments, if separate stream network is
used, we change the multiple layer connection
Feature Sharing Cooperative Network for Semantic Segmentation
581
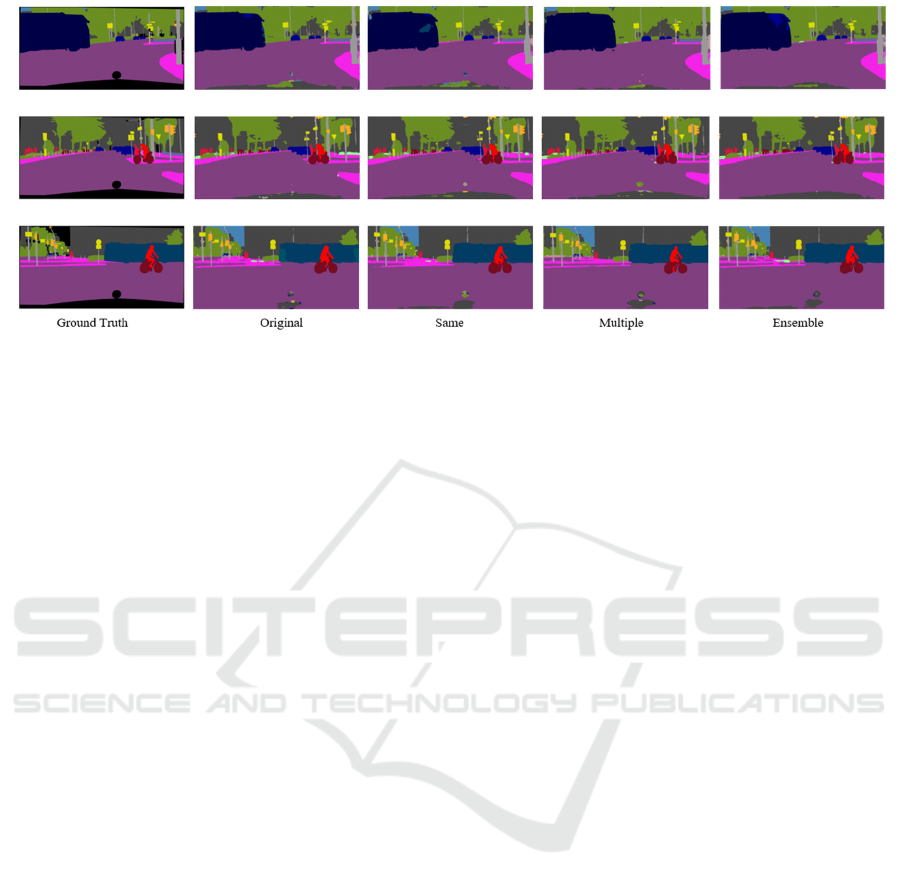
Figure 4: Segmentation results on the Cityscapes dataset (val). The baseline is by Deeplabv3+.
because we consider that mixing information in
different streams will give bad influence for training.
However, this network does not have separate stream
or attention mechanism. Thus, we can use basic
connection method. In the case of multiple layer
connection, we send the feature maps from all top
network layers to the bottom network.
4.4.1 Results
We show the results by cooperative learning of
DeepLabv3+ in Table 1 and 2. Table 1 shows the
results on the Cityscapes dataset and Table 2 shows
the results on the PASCALVOC dataset. Our method
achieved better accuracy than single DeepLabv3+.
We compare two connection methods in Table 1.
Cooperative network with the same layer connection
achieved 77.80% in mIoU which brings 0.5%
improvement. Cooperative learning with multiple
layer connection improved 1.04% in comparison with
the baseline. In addition, we can improve the
accuracy in almost of all classes. Our method is able
to give a good effect.
Similarly, the accuracy of the proposed method
was improved on the PASCAL VOC as shown in
Table 2. Each connection gave more than 1%
improvement. Cooperative network using
Deeplabv3+ was able to improve accuracy on two
datasets.
Our method can segment objects well in
comparison with standard Deeplabv3+ on Cityscapes
dataset in Figure 4. In this experiment, multiple layer
connection is better than the same layer connection.
This is because DeepLabV3+ is specialized to
aggregate the features at multiple scales. Thus, we
consider that multiple layer connection can obtain
good performance in some feature aggregation
networks.
4.5 Consideration
From above experiments, we confirmed that the
cooperative learning improved the accuracy
regardless of the types of baseline networks. For
DANet, cooperative learning with the same layer
connection gave higher accuracy than that with
different layer connection. On the other hand,
multiple layer connection gave higher accuracy for
DeepLabv3+. From those results, the optimal
connection method depends on baseline CNN.
DANet used attention module to enhance the feature
map. Therefore, the same layer connection can use
important features at corresponding layer. On the
other hand, different layer connection cannot use
those features well at different layers.
In the case of DeepLabv3+, multi-scale
information was aggregated using an encoder-
decoder structure. Multiple layer connection can
provide effective information from multiple layers.
As a result, multiple layer connection got high
accuracy because many information from different
layers help DeepLabv3+ structure to get effective
information. We consider that different layer
connection is valid using a simple encoder-decoder
structure network. If we use an attention module to
enhance features map, cooperative learning with the
same layer connection is effective.
In experiments, we compared the ensemble of
networks as shown in Figure 2(a) with the proposed
cooperative network. The proposed method with two
kinds of connections is more accurate than the
ensemble of two networks. The effectiveness of our
cooperative network is demonstrated through two
kinds of experiments.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
582

5 CONCLUSIONS
In this paper, we proposed a cooperative learning for
semantic segmentation that sends the feature maps of
top network to the other network. Specifically, we
evaluated our methods with two kinds of CNNs and
two connection methods. As a result, the effectiveness
of our method was demonstrated by experiments on
two datasets. Cooperative learning with the same
layer connection gave good performance for both
networks. However, the improvement of multiple
layer connection is small for DANet with attention
mechanism. Connection method depends on baseline
network structure. In this paper, we use two kinds of
connection but many connection methods can be
considered. This is a subject for future works.
ACKNOWLEDGEMENTS
This work is partially supported by MEXT/JSPS
KAKENHI Grant Number 18K111382.
REFERENCES
Krizhevsky, A., Sutskever, I., Hinton, G. E. “ImageNet
classification with deep Convolutional neural
networks”, In Advances in neural information
processing systems, pp.1097-1105, (2012)
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., Rabinovich,
A.: Going deeper with convolutions. In: Proceedings of
the IEEE conference on Computer Vision and Pattern
Recognition. pp. 1–9 (2015)
Redmon, J., Divvala, S., Girshick, R., Farhadi, A.: You only
look once:unified, real-time object detection. In:
Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition. pp. 779–788 (2016)
Cao, Z., Hidalgo, G., Simon, T., Wei, S.E., Sheikh, Y.:
Openpose: realtime multi-person 2d pose estimation
using part affinity fields. arXiv preprint
arXiv:1812.08008 (2018)
Isola, P., Zhu, J.Y., Zhou, T., Efros, A.A.: Image-to-image
translation with conditional adversarial networks. In:
Proceedings of the IEEE conference on Computer
Vision and Pattern Recognition. pp. 1125–1134 (2017)
Chen, L.C., Collins, M., Zhu, Y., Papandreou, G., Zoph, B.,
Schroff, F., Adam, H., Shlens, J.: Searching for efficient
multi-scale architectures for dense image prediction. In:
Advances in Neural Information Processing Systems.
pp. 8699–8710 (2018)
Havaei, M., Davy, A., Warde-Farley, D., Biard, A.,
Courville, A., Bengio, Y., Pal, C., Jodoin, P.M.,
Larochelle, H.: Brain tumor segmentation with deep
neural networks. Medical image analysis 35, 18–31
(2017)
Long, J., Shelhamer, E., Darrell, T.: Fully convolutional
networks for semantic segmentation. In: Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition. pp. 3431–3440 (2015)
Ding, H., Jiang, X., Shuai, B., Qun Liu, A., Wang, G.:
Context contrasted feature and gated multi-scale
aggregation for scene segmentation. In: Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition. pp. 2393–2402 (2018)
Yang, M., Yu, K., Zhang, C., Li, Z., Yang, K.: Denseaspp
for semantic segmentation in street scenes. In:
Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition. pp. 3684–3692 (2018)
Peng, C., Zhang, X., Yu, G., Luo, G., Sun, J.: Large kernel
matters–improve semantic segmentation by global
convolutional network. In: Proceedings of the IEEE
conference on Computer Cision and Pattern
Recognition. pp. 4353–4361 (2017)
Huang, Z., Wang, X., Huang, L., Huang, C., Wei, Y., Liu,
W.: Ccnet: Criss-cross attention for semantic
segmentation. In: Proceedings of the IEEE International
Conference on Computer Vision. pp. 603–612 (2019)
Fu, J., Liu, J., Tian, H., Li, Y., Bao, Y., Fang, Z., Lu, H.:
Dual attention network for scene segmentation. In:
Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition. pp. 3146–3154 (2019)
Chen, L.C., Zhu, Y., Papandreou, G., Schroff, F., Adam, H.:
Encoder-decoder with atrous separable convolution for
semantic image segmentation. In: Proceedings of the
European Conference on Computer Vision. pp. 801–
818 (2018)
Zhang, H., Dana, K., Shi, J., Zhang, Z., Wang, X., Tyagi,
A., Agrawal, A.: Context encoding for semantic
segmentation. In: Proceedings of the IEEE conference
on Computer Vision and Pattern Recognition. pp.
7151–7160 (2018)
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., Schiele, B.: The
cityscapes dataset for semantic urban scene
understanding. In: Proceedings of the IEEE conference
on Computer Vision and Pattern Recognition. pp.
3213–3223 (2016)
Everingham, M., Van Gool, L., Williams, C.K., Winn, J.,
Zisserman, A.: The pascal visual object classes (voc)
challenge. International journal of computer vision
88(2), 303–338 (2010)
Badrinarayanan, V., Kendall, A., Cipolla, R.: Segnet: A
deep convolutional encoder-decoder architecture for
image segmentation. IEEE Transactions on Pattern
Analysis and Machine Intelligence 39(12), 2481–2495
(2017)
Ronneberger, O., Fischer, P., Brox, T.: U-net:
Convolutional networks for biomedical image
segmentation. In: International Conference on Medical
Image Computing and Computer-Assisted
Intervention. pp. 234–241. Springer (2015)
Zhao, H., Shi, J., Qi, X., Wang, X., Jia, J.: Pyramid scene
parsing network. In: Proceedings of the IEEE
Feature Sharing Cooperative Network for Semantic Segmentation
583

Conference on Computer Vision and Pattern
Recognition. pp. 2881–2890 (2017)
Takikawa, T., Acuna, D., Jampani, V., Fidler, S.: Gated-
scnn: Gated shape cnns for semantic segmentation. In:
Proceedings of the IEEE International Conference on
Computer Vision. pp. 5229–5238 (2019)
Song, G., Chai, W. : Collaborative learning for deep neural
networks. In Advances in Neural Information
Processing Systems. pp. 1832-1841 (2018).
Zheng, H., Xie, L., Ni, T., Zhang, Y., Wang, Y. F., Tian, Q.,
Elliot, K. F & Yuille, A. L. : Phase Collaborative
Network for Two-Phase Medical Image Segmentation.
arXiv preprint arXiv:1811.11814. (2018)
Lake, B. M., Salakhutdinov, R., Tenenbaum, J. B.: Human-
level concept learning through probabilistic program
induction. Science, 350(6266), pp.1332-1338. (2015)
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
584
