
Non-linear Distortion Recognition in UAVs’ Images using Deep Learning
Leandro H. F. P. Silva
1
, Jocival D. Dias Jr
1
, Jean F. B. Santos
1
, Jo
˜
ao F. Mari
2
,
Maur
´
ıcio C. Escarpinati
1
and Andr
´
e R. Backes
1
1
School of Computer Science, Federal University of Uberl
ˆ
andia, Brazil
2
Federal University of Vic¸osa, Brazil
Keywords:
Unmanned Aerial Vehicles, Precision Agriculture, Non-linear Distortion, Deep Learning.
Abstract:
Unmanned Aerial Vehicles (UAV) have increasingly been used as tools in many tasks present in Precision
Agriculture (PA). Due to the particular characteristics of the flight and the UAV equipment, several challenges
need to be addressed, such as the presence of non-linear deformations in the captured images. These deforma-
tions impair the image registration process so they must be identified to be properly corrected. In this paper,
we propose a Convolutional Neural Network (CNN) architecture to classify whether or not a given image has
non-linear deformation. We compared our approach with 4 traditional CNNs and the results show that our
model achieves has an accuracy similar to the compared CNNs, but with an extremely lower computational
cost, which could enable its use in flight time, in a system embedded in the UAV.
1 INTRODUCTION
At the end of the 19th century, many studies addressed
the problem of the world population growth and the
relationship with the planet’s food production capac-
ity. However, since the 1960s, a series of technolog-
ical innovations has helped to increase food produc-
tion in the world, thus preventing food shortages from
becoming a problem for humanity. Among the devel-
oped technologies we can mention the use of irriga-
tion systems, mechanization of crops, chemical fertil-
izers, genetically modified foods, as well as the use
of satellite images. The latter allows to improve the
management of the area to be planted, allowing to an-
alyze the quantity of necessary inputs as well as the
area affected by pests, among other factors (Malthus,
1872; Hazell, 2009; Farmer, 1986).
More recently, the use of Unmanned Aerial Ve-
hicles (UAVs) has facilitated access to images of the
area to be cultivated with greater resolution and more
often, thus allowing a constant analysis of the region
and a better decision-making regarding the use of in-
puts and pest control. Unlike other aerial image ac-
quisition devices, such as satellites and large aircraft,
UAVs make it possible to capture images at low and
medium altitudes (50 to 400 m), providing a more de-
tailed view of the region under analysis. These UAVs
allow the use of a wide range of sensors that produce
the most diverse types of data on the studied area:
RGB cameras, heat capture sensors, multi and hyper-
spectral cameras, among others. In addition, recent
technological advances and their popularization have
reduced their costs (Jenkins and Vasigh, 2013), caus-
ing even small farmers to have adopted this technol-
ogy for many applications, such as growth estimation
or to identify other important agronomic characteris-
tics, such as nitrogen stress (McBratney et al., 2005;
Milella et al., 2019; Blackmer and Schepers, 1996;
Sankaran et al., 2015; Kataoka et al., 2003).
The remainder of this paper is organized as fol-
lows. Section 2 shows some recent papers published
in the area. In Section 3 we detail the problem and
their implications. In Section 4 we detail the non-
linear model. In Section 5, we present an overview
of the CNN and how it was used to deal with our
problem. Section 6 presents the image dataset used
in the experiments. Sections 7 and 8 present the ex-
periments and a discussion of the results. Section 9
presents the conclusions and future work.
2 RELATED WORK
In (Yasir et al., 2018), the authors presented a data-
driven framework for multispectral registration. The
proposed framework assumes that the greater the
number of control points, the better is the image align-
ment. Their work verifies all spectra taken two by two
Silva, L., Dias Jr, J., Santos, J., Mari, J., Escarpinati, M. and Backes, A.
Non-linear Distortion Recognition in UAVs’ Images using Deep Learning.
DOI: 10.5220/0010309504470454
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 4: VISAPP, pages
447-454
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
447

in order to identify order of spectra that maximizes the
number of control points during the alignment pro-
cess.
In (Junior et al., 2020) the authors proposed to
modify the structure proposed by (Yasir et al., 2018)
for the process of registering multispectral images.
The modification consists of the generalization orig-
inally proposed to work with methods based on key
points so that the spectral domain methods can be
used in the registration process with greater precision
and less execution time.
The authors in (Eppenhof and Pluim, 2019) pro-
posed the use of deep learning methods for image
registration with non-linear distortions as an alterna-
tive to traditional registration methods. The study in
question is motivated by the fact that traditional meth-
ods fail to estimate larger displacements and complex
deformation fields. For this complex scenario, a mul-
tiple resolution task is required. Therefore, (Eppen-
hof and Pluim, 2019) proposed the progressive train-
ing of neural networks to solve the problem. Thus,
instead of training a large Convolutional Neural Net-
work (CNN) in the one-time registration task, smaller
versions of the network were initially trained with
low resolution images and deformation fields. Dur-
ing the training, the network was progressively ex-
panded with additional layers, which were trained
with high-resolution data. Results showed that this
training mode allows a network to learn greater dis-
placements fields without sacrificing registration ac-
curacy and that the resulting network is less prone
to registration errors compared to training the entire
network at once. The authors also agreed that a pro-
gressive training procedure leads to greater accuracy
of the record when learning large and complex non-
linear deformations.
The work of (Zhu et al., 2019) developed a cor-
respondence method based on learning multispectral
images (RGB and infrared) captured by satellite sen-
sors. The method in question involves a Convolu-
tional Neural Network (CNN) that compares a pair of
multispectral images in question and a search strategy
model that will check the corresponding point within
a search window in the target image for a given point
in the reference image. In this way, a densely con-
nected CNN was developed to extract the common
characteristics of the different spectral bands. The ex-
periments showed a high-performance power, in addi-
tion to the ability to generalize the proposed method,
being applicable in multitemporal remote sensing im-
ages and short-range images.
3 PROBLEM DEFINITION
Due its low altitude of flight and the diversity of sen-
sors, many methods have been developed to process
the images obtained using UAVs. Some methods deal
with the fact that these images and the different bands
of frequencies must be organized in a mosaic that rep-
resents the entire area (Junior et al., 2019). However,
the registration process may be impaired by the pres-
ence of deformation on the images.
The cameras used in Precision Agriculture already
produce the most varied distortions in the images due
to the most diverse factors. Thus, when these cam-
eras are coupled to a UAV, this problem is heightened.
During a flight, the UAV has three basic control axes:
yaw, pitch, and roll.
Thus, the success in identifying such distortions
in flight time, with a system embedded in the UAV of
low computational cost, for example, would greatly
enhance the subsequent processes, whose objective is
to promote PA. This gain in PA activities would be
fundamentally because once an image was detected
with the presence of deformation, the mosaic process
would be facilitated. Such a facility would be, for
example, avoiding the need for new flights to cover a
certain region or even discarding the captured images
that would not be of value for the process in question.
In short, in this paper, we address the problem
of identifying whether or not a given image has non-
linear deformation. To accomplish that we proposed
a Convolutional Neural Network model and compare
its performance with traditional CNNs from literature.
4 NON-LINEAR MODEL
A mapping function can be defined mathematically
as a 2D function, which maps the (x, y) coordinates
of a given A image to the (x, y) coordinates of a B im-
age. Two main types of functions of mapping, Linear
and Non-Linear (or Non-Rigid), are characterized by
the type of deformation in the image (Gonzalez et al.,
2002).
Figure 1 shows the delimitation between linear
distortions, as well as non-linear distortions, which
are objects of this work.
Literature presents many works addressing the
problem of non-linear deformations, in the most var-
ied contexts in which these deformations can be
present (Walimbe and Shekhar, 2006; Shekhar and
Zagrodsky, 2002; Wang and Staib, 1998). According
to (Wang and Staib, 1998), there is no mathematical
model for this type of deformation because a given
anatomical structure does not result in the deforma-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
448

Figure 1: Example of linear and non-linear transformations
(Uchida, 2013).
tion of another structure. Thus, an analogous model
is used to represent these deformations. A Eulerian
Reference can be used in the formulation of the non-
linear model. For this scenario, a component of the
image is tracked in relation to its final coordinates.
For that, we will define the transformation in question
through a homeomorphic mapping of the coordinate
system in two dimensions, according to Equation 1:
w = (z, y) → (x − u
x
(w), y − u
y
(w)) (1)
where u(w) = [u = (w),u
y
(w)]
T
is the displacement
at each pixel w whose coordinate is denoted as (x,y).
This mapping allows for the detailed local transfor-
mation into the specific anatomy of the component of
the image.
The formulation of the non-linear model is also
defined in (Christensen et al., 1996), where com-
ponents are considered to be displaced with a pro-
portional force. This spatial transformation satisfies
the Partial Differential Equation (PDE), as shown in
Equation 2:
µ∇
2
u + (µ + β)∇(∇ · u) = F(u) (2)
where µ(w) = 0 for w on the image boundary. In Equa-
tion 2, µ and β are Lam
´
e constants. The body force,
F(u), is the driving function that deforms the images.
5 CONVOLUTIONAL NEURAL
NETWORK
Recent advances in the use of GPUs and in the the-
ory of neural networks have allowed the development
of new machine learning techniques, including deep
learning. This is a category of neural networks algo-
rithms whose main characteristics is the presence of
a large number of neurons arranged in layers, which
are grouped into processing blocks.
Among the many deep learning algorithms Con-
volutional Neural Network (CNN) plays a important
role in many task ain areas as computer vision, speech
recognition and audio recognition. CNN is a network
which is based on the concept of receptive present in
the human visual system. In these networks, learning
process takes place through the use of different fil-
ters that emphasizes characteristics present in the im-
age, thus imitating the human learning process. These
networks are able to analyze the spatial correlations
among pixels of an image to extract relevant attributes
for classification, regression, and segmentation tasks
(LeCun et al., 1998; Guo et al., 2016; Ponti et al.,
2017). Literature shows that the vast majority of CNN
models are defined using three types of layers: con-
volutional, pooling, and fully connected layers. These
layers can be combined in different ways to improve
CNN’s learning process. Next, we present a brief de-
scription of the mentioned layers.
In a convolutional layer, the main goal is to ex-
tract significant attributes from an image. To achieve
this goal, several convolution operations are applied
to the input data and these operations act as receptive
filters that will highlight different attributes of a local
region of the image. In general, the aforementioned
filters are defined as 3 × 3 or 5 × 5 kernels. Also, to
speed up the training of the network and consequent
improvement in results, the activation function REc-
tified Linear Unit (ReLU) and a batch normalization
operation are applied to the result of the convolutional
layer (LeCun et al., 2015).
The convolutional layer is usually followed by a
pooling layer. The main objective of this layer is to re-
duce the feature maps that were calculated by the pre-
vious layers. This way, network sensitivities to image
distortions and data changes are reduced. In general,
a 2 × 2 pooling mask is used according to established
criteria (e.g., maximum or the average of the pixels of
the region), which will reduce a region of 4 pixels to
a single value (Scherer et al., 2010).
Finally, we find the fully connected (also known as
dense) layer. This layer receives as input the 2D fea-
ture maps obtained from previous layers and its main
objective is to learn a vector of 1D features capable
of discriminating the input image. The feature vector
is then used as input to a softmax classifier that will
return the most likely equivalence class for the image.
Non-linear Distortion Recognition in UAVs’ Images using Deep Learning
449
6 IMAGE DATASET
6.1 Selected Images
For our experiments, we considered two mosaics cre-
ated from images captured by UAVs. These mosaics
have 18543 × 2635 and 8449 × 11180 pixels size.
These mosaics refer to two different areas planted
with sugar cane. It is worth mentioning that the mo-
saics were not captured with the same equipment and
under the same climatic conditions, which reflects dif-
ferent resolutions for each case.
From each mosaic, we selected grayscale patches
of 128 × 128 pixels size. Subsequently, we discard
patches that have little (or any) significant visual in-
formation. This was determined by the number of
pixels (n) with a value of 0 in the patch. Thus, if
n < 10, the patch is considered for the composition of
the dataset; otherwise, the patch is discarded. There-
fore, we built two datasets, which we will call DS1
and DS2 and which have, respectively, 3353 and 2365
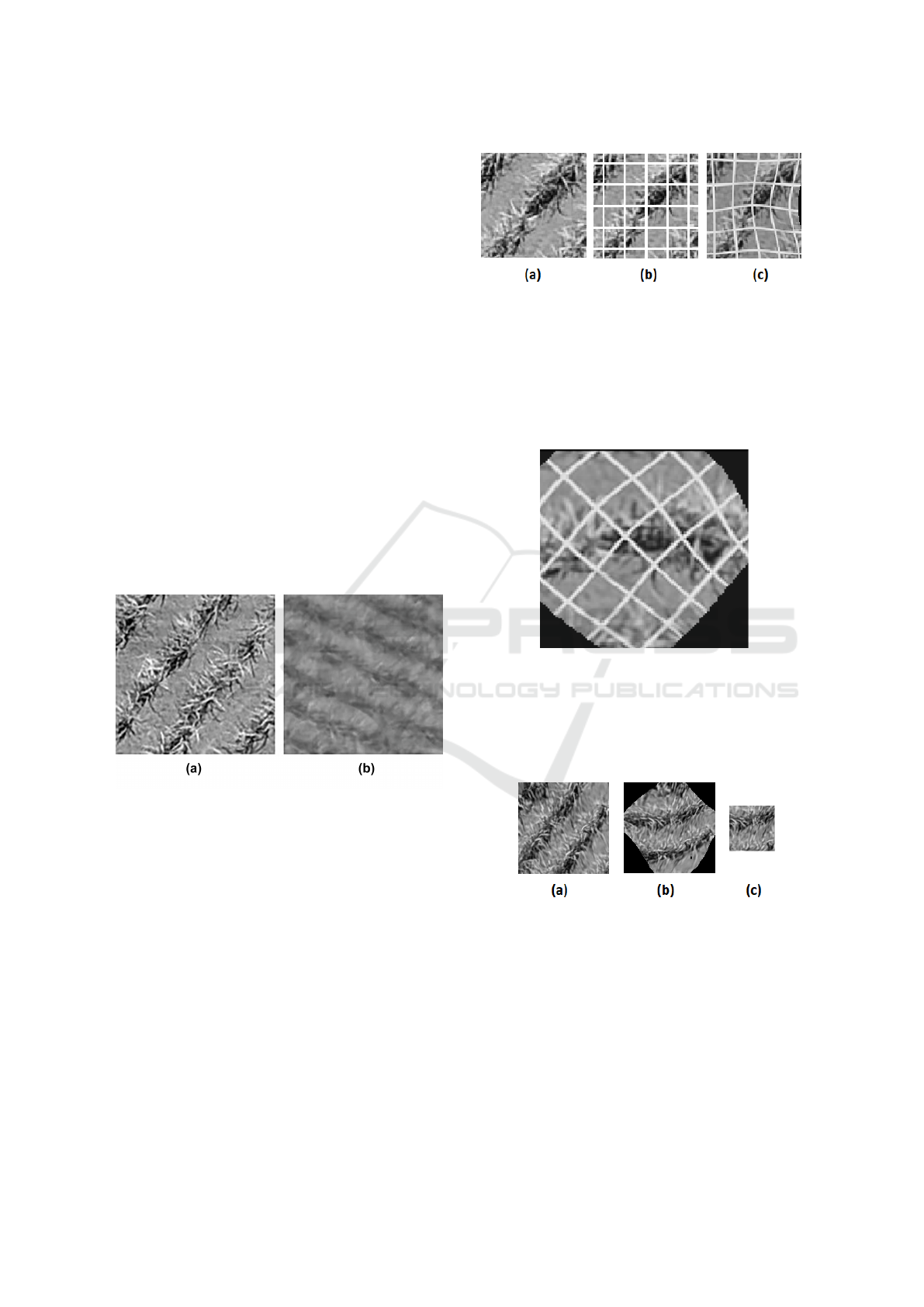
images. Figure 2 illustrates two examples of images
of patches generated for each dataset (Silva et al.,
2020).
Figure 2: Example of images that make up both datasets:
(a) DS1; (b) DS2.
6.2 Dataset Image Distortions
For the experiments we used the work (Eppenhof and
Pluim, 2019) to create non-linear deformations in the
images, where deformable transformations are im-
plemented just like B-spline transformations and dis-
placements are defined in a grid. In (Eppenhof and
Pluim, 2019), as we deal with two-dimensional im-
ages, we used two grids, one for the displacements in
the y-directions, and one for the displacements in the
x-directions. Figure 3 shows the relationship of an
image in our dataset with its respective grid and the
distortion generated in that image through the grid.
Still according to (Eppenhof and Pluim, 2019), we
can concatenate other transformations through an in-
terpolator method. These transformations are applied
Figure 3: Distortion example: (a) Original image; (b) Orig-
inal image (a) with their respective grids; (c) Image after
applying the deformation.
in reverse order since they are applied to the sampling
grid and not to the images. Figure 4 shows an ex-
ample of a 10% translation followed by a 45 degrees
rotation around the point (0.5, 0.5), and then the B-
spline transformation.
Figure 4: Combination of transformations for the image in
Figure 3 (c).
To avoid black areas, we cropped a 64× 64 pixels size
region aligned with the center of the image, thus re-
moving any artifact added to the image by the selected
transformation method, as illustrated by Figure 5.
Figure 5: (a) Deformation-free image; (b) Deformed im-
age, according to (Eppenhof and Pluim, 2019); (c) Cropped
image.
Finally, when applying the transformations pre-
sented in all the patches of DS1 and DS2, we will have
the corresponding elastic distorted images in both
datasets. Thus, we have two equivalence classes: (1)
distortion-free images and (2) distorted images. Both
datasets will be available for replication and other ex-
periments as request.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
450

7 EXPERIMENTS
To classify the equivalence classes mentioned in the
previous section, we evaluated 4 traditional CNN
architectures: InceptionV3 (Szegedy et al., 2016),
ResNet (He et al., 2016), SqueezeNet (Iandola et al.,
2016) and VGG-16 (Simonyan and Zisserman, 2014).
We used these networks pre-trained in the 2012
dataset Imagenet (Krizhevsky et al., 2012) and made
the pertinent adjustments to our classification prob-
lem. We also carried out a data augmentation to re-
duce the possibility of overfitting in our experiments.
In addition to the traditional CNNs, we proposed an
alternative architecture that will be presented as fol-
lows. Our architecture is motivated by (Marcos et al.,
2019b; Marcos et al., 2019a), where simpler CNNs
and sets of filters were used to solve less complex
classification problems.
For our CNN, we took inspiration from the
AlexNet architecture. In its traditional architecture,
AlexNet has eight layers, the first five of which are
convolutional, with a ReLU activation function, fol-
lowed by max-pooling layers, and the others consist
of dense layers (Krizhevsky et al., 2012). Due to the
reduced size of our images (64 × 64 pixels size), our
architecture has fewer layers when compared to tra-
ditional CNNs. We used 5 convolutional layers to
process the images and each layer has, respectively,
16, 32, 32, 64, and 128 filters, where, in all con-
volutional layers, the respective filters always have
the size 3 × 3. To improve its learning ability and
to enhance its training, we applied the ReLU non-
linearity activation function after each convolutional
layer. There is also a batch normalization after each
ReLU function, which is followed by a 2 × 2 max-
pooling layer. In the sequence, we used the result-
ing volume as an input for the dense layers. The first
two dense layers have 128 neurons each and they use
ReLU as activation function. We also apply a 20%
dropout in each dense layer. Finally, the output layer
has 2 neurons that determine the equivalence class.
Figure 6 shows the structure of our CNN.
Figure 6: Illustration of the architecture of our CNN.
All CNNs were implemented using the Python
version of Tensorflow
1
, an open-source framework
for efficient building, training, and use of deep neu-
ral network models. TensorFlow was developed by
Google (Abadi et al., 2016b) and it is based on
tensors and dataflow graphs. Tensors are numer-
ical multidimensional arrays to represent the data.
Dataflow graphs nodes represent operations and edges
describe the flow of data throughout the processing
steps (G
´
eron, 2019; Abadi et al., 2016a; Hope et al.,
2017).
For the experiments we used 75% of the sam-
ples for training, while the remaning images were
used for validation. Experiments were conducted
on a Personal Computer with Intel(R) Core(TM) i7-
7700 CPU @ 3.60GHz, 32GB RAM, 64-bit Windows
OS and GPU NVIDIA GeForce GTX 1050 Ti, 4GB
GDDR5. We also used Python 3.6 and Keras 2.1.6-
tf with TensorFlow 1.10.0 and CUDA Toolkit 9.0 to
implement and test the experiments.
8 RESULTS
Figure 7 shows the evolution of the accuracy in both
test and training sets for all evaluated CNNs, i.e.,
ResNet, Inception-V3, VGG-16, SqueezeNet, as well
as our proposed model. Table 1 summarizes the ac-
curacy rates obtained by each CNN in each datasets
DS1 and DS2 after 20 epochs training. As we can see,
results demonstrate that all CNNs model are capable
of discriminate images according to the presence (or
not) of an elastic distortion. All models, including
ours, were able to achieve accuracy rates above 92%.
Even though all CNNs present high accuracies,
we noticed that dataset DS2 represents a greater chal-
lenge for all CNNs. While for dataset DS1 all CNNs
are able to achieve a stable accuracy over the epochs
in the test set, the same is to true for dataset DS2.
All evaluated CNNs exhibit a larger variation among
different epochs and their results increase or decrease
despite the good accuracy obtained in the training set.
Such behavior indicates that the feature learned in the
training set are not as robust in dataset DS2 as in
dataset DS1. This is corroborated by the results pre-
sented in Table 1, where we can see that all CNNs
present lower accuracies for dataset DS2 than DS1.
Another important point to be analyzed is the
computational cost of each CNN. Table 2 shows the
number of trainable parameters present in each CNN
in the context of the addressed problem. As one
can see, even though our proposed model presents
1
http://tensorflow.org
Non-linear Distortion Recognition in UAVs’ Images using Deep Learning
451
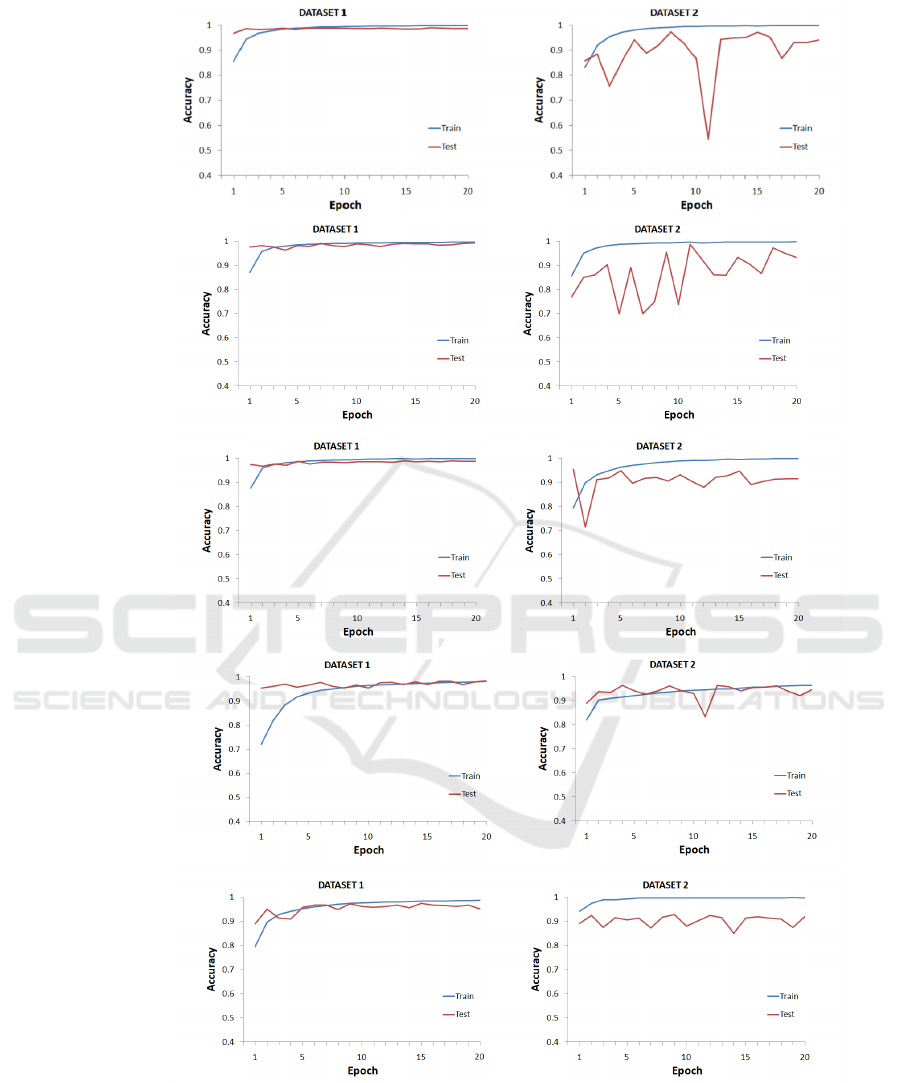
(a)
(b)
(c)
(d)
(e)
Figure 7: Accuracy of each evaluated CNN in both datasets: (a) ResNet; (b) InceptionV3; (c) VGG-16; (d) SqueezeNet; (e)
Proposed model.
the smaller success rate, it also presents the smallest
number of parameters and, as a consequence, a con-
siderably lower computational cost than traditional
CNNs. When compared with InceptionV3, our CNN
model obtained a accuracy 1.72% and 5.92% lower in
dataset DS1 and DS2, respectively. However, its com-
putational cost is smaller as it has only 0.64% of the
number of parameter of the InceptionV3 model. Ad-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
452
ditionaly, we must emphasize that compared CNNs
were previously trained in the 2012 Imagenet dataset
while our proposed model was trained from scratch.
In this sense, given that the results of our architecture
are close to the traditional CNNs, this approach may
enable a great advance for the use of this resource in
a system embedded in the UAV. The UAV flight time
detection can support subsequent processes (e.g., cor-
rection of detected distortion and image registration),
in addition to reducing the financial costs inherent in
the process.
Table 1: Results obtained for each CNN model.
CNN model DS1 DS2
ResNet 98.95% 94.36%
InceptionV3 99.25% 98.84%
VGG-16 98.88% 95.35%
SqueezeNet 98.43% 96.41%
Proposed CNN 97.53% 92.92%
Table 2: Number of parameters of each CNN model.
CNN model # of parameters
ResNet 22,591,810
InceptionV3 22,081,826
VGG-16 14,797,122
SqueezeNet 723,522
Proposed 141,058
9 CONCLUSION
Convolutional Neural Networks demonstrated a high
power in the identification of non-linear deformations
(and variants) in UAVs’ images. While most tradi-
tional architectures have a high computational cost,
a fact that could hinder such processing during flight
time, our proposed CNN represents an attractive al-
ternative as it presents the lowest computational cost
with only a small decrease in the accuracy when com-
pared with traditional architectures. Also, as exposed
in the papers of (Eppenhof and Pluim, 2018; Eppen-
hof and Pluim, 2019), the process of detecting the de-
formation vector field and the consequent image cor-
rection process has an enormous computational cost.
Thus, the identification of the presence (or not) of
non-linear deformations between the images would
represent considerable gain.
In future work, we intend to propose a method to
correct the detected non-linear distortions, thus po-
tentializing the mosaic process of the images. Also,
given the possibility of UAVs having in many cases
multi and hyperspectral cameras, we intend to repli-
cate this work in multichannel images.
ACKNOWLEDGMENT
Andr
´
e R. Backes gratefully acknowledges the finan-
cial support of CNPq (National Council for Scien-
tific and Technological Development, Brazil) (Grant
#301715/2018-1). This study was financed in part by
the Coordenac¸
˜
ao de Aperfeic¸oamento de Pessoal de
N
´
ıvel Superior - Brazil (CAPES) - Finance Code 001.
The authors would like to thank the company Sensix
Inovac¸
˜
oes em Drones Ltda (http://sensix.com.br) for
providing the images used in the tests.
REFERENCES
Abadi, M., Agarwal, A., Barham, P., Brevdo, E., Chen, Z.,
Citro, C., Corrado, G. S., Davis, A., Dean, J., Devin,
M., et al. (2016a). Tensorflow: Large-scale machine
learning on heterogeneous distributed systems. arXiv
preprint arXiv:1603.04467.
Abadi, M., Barham, P., Chen, J., Chen, Z., Davis, A., Dean,
J., Devin, M., Ghemawat, S., Irving, G., Isard, M.,
Kudlur, M., Levenberg, J., Monga, R., Moore, S.,
Murray, D. G., Steiner, B., Tucker, P., Vasudevan, V.,
Warden, P., Wicke, M., Yu, Y., and Zheng, X. (2016b).
Tensorflow: A system for large-scale machine learn-
ing.
Blackmer, T. M. and Schepers, J. S. (1996). Aerial pho-
tography to detect nitrogen stress in corn. Journal of
Plant Physiology, 148(3-4):440–444.
Christensen, G. E., Miller, M. I., Vannier, M. W.,
and Grenander, U. (1996). Individualizing neuro-
anatomical atlases using a massively parallel com-
puter. Computer, 29(1):32–38.
Eppenhof, K. A. and Pluim, J. P. (2018). Pulmonary ct
registration through supervised learning with convolu-
tional neural networks. IEEE transactions on medical
imaging, 38(5):1097–1105.
Eppenhof, K. A. J. and Pluim, J. P. W. (2019). Pulmonary ct
registration through supervised learning with convolu-
tional neural networks. IEEE Transactions on Medical
Imaging, 38(5):1097–1105.
Farmer, B. (1986). Perspectives on the ‘green revolution’in
south asia. Modern Asian Studies, 20(1):175–199.
G
´
eron, A. (2019). Hands-On Machine Learning with Scikit-
Learn, Keras, and TensorFlow: Concepts, Tools, and
Techniques to Build Intelligent Systems. O’Reilly Me-
dia.
Gonzalez, R. C., Woods, R. E., et al. (2002). Digital image
processing.
Guo, Y., Liu, Y., Oerlemans, A., Lao, S., Wu, S., and Lew,
M. S. (2016). Deep learning for visual understanding:
A review. Neurocomputing, 187:27–48.
Hazell, P. B. (2009). The Asian green revolution, volume
911. Intl Food Policy Res Inst.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In 2016 IEEE Con-
Non-linear Distortion Recognition in UAVs’ Images using Deep Learning
453

ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Hope, T., Resheff, Y. S., and Lieder, I. (2017). Learning
tensorflow: A guide to building deep learning systems.
” O’Reilly Media, Inc.”.
Iandola, F. N., Han, S., Moskewicz, M. W., Ashraf, K.,
Dally, W. J., and Keutzer, K. (2016). Squeezenet:
Alexnet-level accuracy with 50x fewer parameters and
<0.5mb model size. arXiv:1602.07360.
Jenkins, D. and Vasigh, B. (2013). The economic impact of
unmanned aircraft systems integration in the United
States. Association for Unmanned Vehicle Systems
International (AUVSI).
Junior, J. D. D., Backes, A. R., and Escarpinati, M. C.
(2019). Detection of control points for uav-
multispectral sensed data registration through the
combining of feature descriptors.
Junior, J. D. D., Backes, A. R., Escarpinati, M. C., Silva, L.
H. F. P., Costa, B. C. S., and Avelar, M. H. F. (2020).
Assessing the adequability of fft-based methods on
registration of uav-multispectral images.
Kataoka, T., Kaneko, T., Okamoto, H., and Hata, S. (2003).
Crop growth estimation system using machine vision.
In Proceedings 2003 IEEE/ASME International Con-
ference on Advanced Intelligent Mechatronics (AIM
2003), volume 2, pages b1079–b1083. IEEE.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Proceedings of the 25th International
Conference on Neural Information Processing Sys-
tems - Volume 1, NIPS’12, pages 1097–1105, USA.
Curran Associates Inc.
LeCun, Y., Bengio, Y., and Hinton, G. E. (2015). Deep
learning. Nature, 521(7553):436–444.
LeCun, Y. L., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of IEEE, 86(11):2278–2324.
Malthus, T. R. (1872). An Essay on the Principle of Popu-
lation..
Marcos, A. P., Rodovalho, N. L. S., and Backes, A. R.
(2019a). Coffee leaf rust detection using convolu-
tional neural network. In 2019 XV Workshop de Vis
˜
ao
Computacional (WVC), pages 38–42. IEEE.
Marcos, A. P., Rodovalho, N. L. S., and Backes, A. R.
(2019b). Coffee leaf rust detection using genetic algo-
rithm. In 2019 XV Workshop de Vis
˜
ao Computacional
(WVC), pages 16–20. IEEE.
McBratney, A., Whelan, B., Ancev, T., and Bouma, J.
(2005). Future directions of precision agriculture.
Precision agriculture, 6(1):7–23.
Milella, A., Reina, G., and Nielsen, M. (2019). A multi-
sensor robotic platform for ground mapping and esti-
mation beyond the visible spectrum. Precision agri-
culture, 20(2):423–444.
Ponti, M. A., Ribeiro, L. S. F., Nazar
´
e, T. S., Bui, T.,
and Collomosse, J. (2017). Everything you wanted
to know about deep learning for computer vision but
were afraid to ask. In SIBGRAPI Tutorials, pages 17–
41. IEEE Computer Society.
Sankaran, S., Khot, L. R., Espinoza, C. Z., Jarolmasjed,
S., Sathuvalli, V. R., Vandemark, G. J., Miklas, P. N.,
Carter, A. H., Pumphrey, M. O., Knowles, N. R., et al.
(2015). Low-altitude, high-resolution aerial imaging
systems for row and field crop phenotyping: A review.
European Journal of Agronomy, 70:112–123.
Scherer, D., M
¨
uller, A. C., and Behnke, S. (2010). Eval-
uation of pooling operations in convolutional archi-
tectures for object recognition. In Artificial Neural
Networks - ICANN 2010 - 20th International Confer-
ence, Thessaloniki, Greece, September 15-18, 2010,
Proceedings, Part III, volume 6354 of Lecture Notes
in Computer Science, pages 92–101. Springer.
Shekhar, R. and Zagrodsky, V. (2002). Mutual information-
based rigid and nonrigid registration of ultrasound
volumes. IEEE transactions on medical imaging,
21(1):9–22.
Silva, L. H. F. P., Dias J
´
unior, J. D., Santos, J. F. B., Mari,
J. F., Escarpinati, M. C., and Backes, A. R. (2020).
Classification of uavs’ distorted images using convo-
lutional neural networks. In Workshop de Vis
˜
ao Com-
putacional, pages 98–108, Uberl
ˆ
andia, Brazil.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wojna,
Z. (2016). Rethinking the inception architecture for
computer vision. In 2016 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
2818–2826.
Uchida, S. (2013). Image processing and recognition for
biological images. In Development, growth & differ-
entiation.
Walimbe, V. and Shekhar, R. (2006). Automatic elastic im-
age registration by interpolation of 3d rotations and
translations from discrete rigid-body transformations.
Medical Image Analysis, 10(6):899–914.
Wang, Y. and Staib, L. H. (1998). Elastic model based non-
rigid registration incorporating statistical shape infor-
mation. In International Conference on Medical Im-
age Computing and Computer-Assisted Intervention,
pages 1162–1173. Springer.
Yasir, R., Eramian, M., Stavness, I., Shirtliffe, S., and
Duddu, H. (2018). Data-driven multispectral image
registration. In 2018 15th Conference on Computer
and Robot Vision (CRV), pages 230–237. IEEE.
Zhu, R., Yu, D., Ji, S., and Lu, M. (2019). Matching
rgb and infrared remote sensing images with densely-
connected convolutional neural networks. Remote
Sensing, 11(23):2836.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
454
